- Компьютерное зрение. Математика в задачах обработки изображений

Содержание
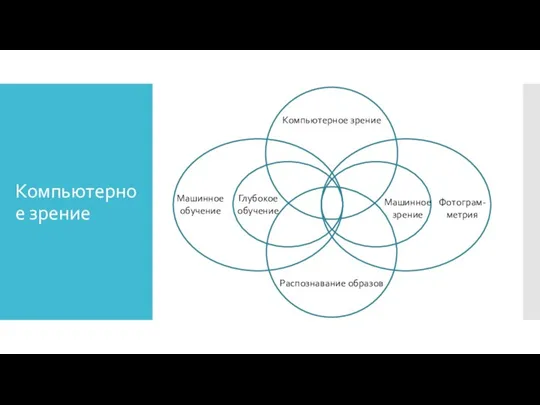
- 2. Компьютерное зрение Распознавание образов Компьютерное зрение Фотограм- метрия Машинное зрение Глубокое обучение Машинное обучение
- 3. Примеры задач Распознавание автомобильных номеров Классификация изображений Выявление движущихся объектов на видео, слежение Создание панорам из
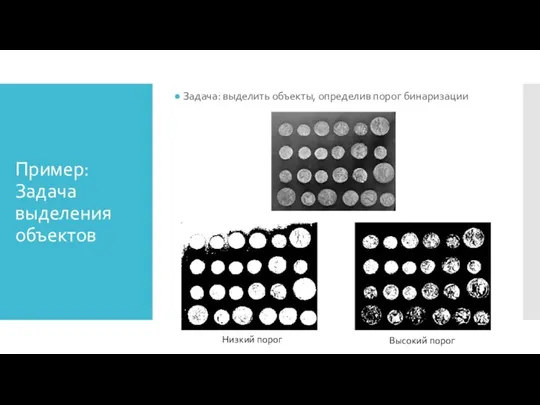
- 4. Пример: Задача выделения объектов Задача: выделить объекты, определив порог бинаризации Низкий порог Высокий порог
- 5. Яркости пикселей объектов и фона имеют различное распределение Гипотеза
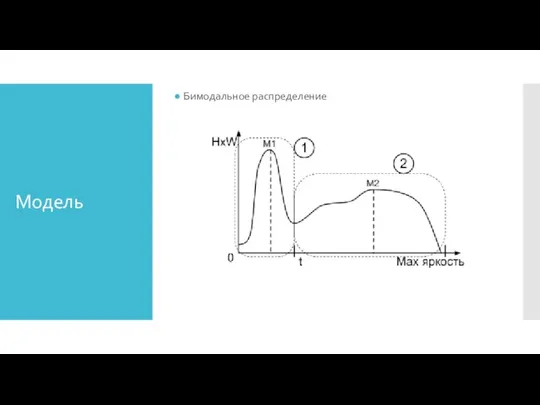
- 6. Модель Бимодальное распределение
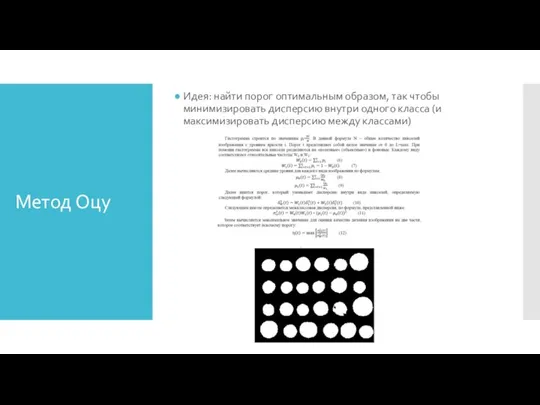
- 7. Метод Оцу Идея: найти порог оптимальным образом, так чтобы минимизировать дисперсию внутри одного класса (и максимизировать
- 8. Пример Задача: разделить изображение на области так чтобы каждая область соответствовала одному объекту
- 9. Соседние пикселы внутри одного объекта мало различаются по яркости Гипотеза
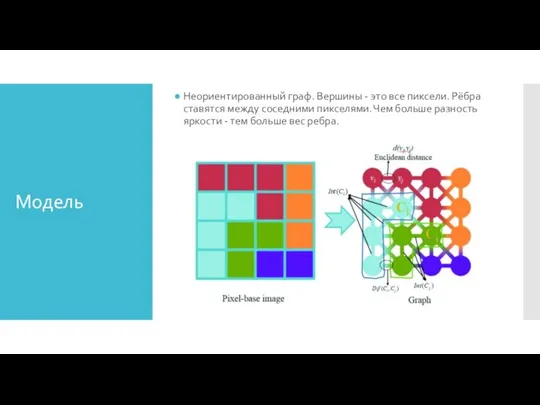
- 10. Модель Неориентированный граф. Вершины - это все пиксели. Рёбра ставятся между соседними пикселями. Чем больше разность
- 11. Метод «Efficient Graph-Based Image Segmentation» Идея: Будем добавлять рёбра между пикселами с минимальным весом, чтобы строить
- 12. Graph-Based Image Segmentation
- 13. Пример Внутри областей имеются резкие границы, цвет неоднороден
- 14. Будем штрафовать точки границы, чтобы она была только там где точно необходимо Гипотеза
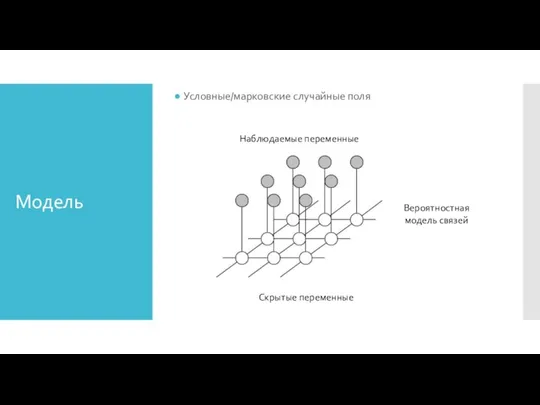
- 15. Модель Условные/марковские случайные поля Скрытые переменные Наблюдаемые переменные Вероятностная модель связей
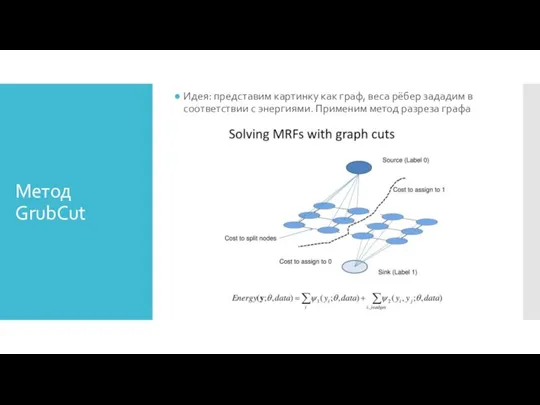
- 16. Метод GrubCut Идея: представим картинку как граф, веса рёбер зададим в соответствии с энергиями. Применим метод
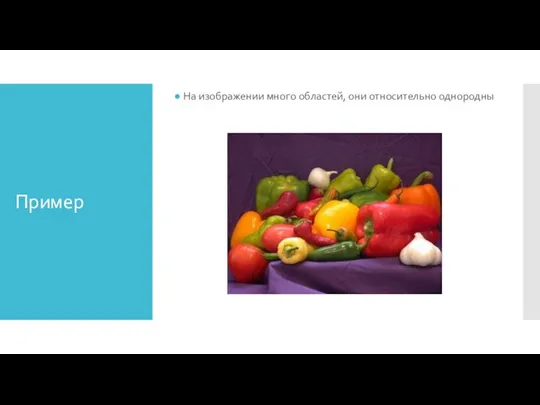
- 17. Пример На изображении много областей, они относительно однородны
- 18. Пикселы одного объекта близки в пространстве яркость-координата Гипотеза
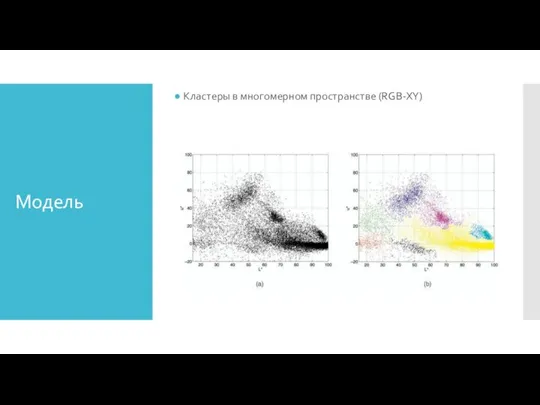
- 19. Модель Кластеры в многомерном пространстве (RGB-XY)
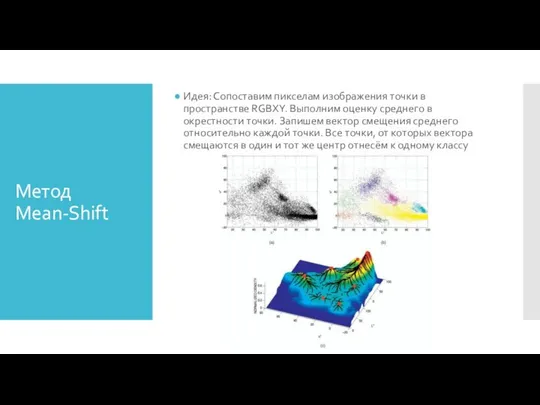
- 20. Метод Mean-Shift Идея: Сопоставим пикселам изображения точки в пространстве RGBXY. Выполним оценку среднего в окрестности точки.
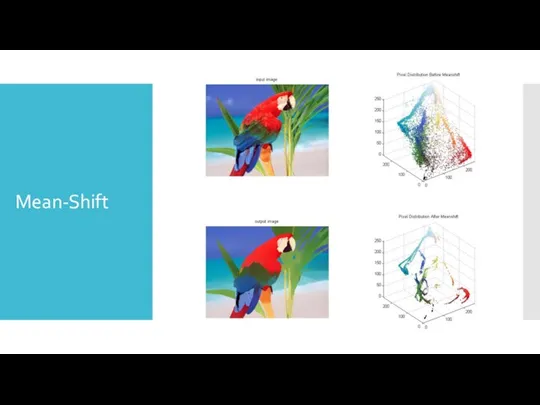
- 21. Mean-Shift
- 22. Совсем сложный пример
- 23. Нейросети могут всё! Гипотеза
- 24. Модель Модель придумывать не будем Соберём побольше данных и закинем в нейросеть ... Profit!!!
- 25. Нейронные сети Эволюция архитектур
- 26. Линейный классификатор Сумма + Нелинейность (Сигмоид) = Logistic regression это и есть нейрон
- 27. Нейронные сети LogReg + LogReg = Neural Network За счёт нескольких нелинейностей нейросеть не сводится к
- 28. Многослойные нейронные сети Больше скрытых слоёв! Это всё ещё комбинация суммирования и нелинейности
- 29. Многослойные нейронные сети ЕЩЁ БОЛЬШЕ! ЭТО МАГИЯ! Это всё ещё комбинация суммирования и нелинейности
- 30. Свёрточные сети Свёртка + Нейросеть = Свёрточные сети При свёртке входов сети гораздо меньше, чем количество
- 31. Свёрточные сети Свёртка + Нейросеть = Свёрточные сети Да, ещё используется уменьшение размера картинки (Pooling/Subsampling)
- 32. Свёрточные сети Одна из первых сетей для классификации Неплохо, но так просто уже никто не делает.
- 33. Применение Классификация Регрессия Детектирование Обучение представлений (Embeddings) …
- 34. За кадром ReLU Dropout 1x1 convolution Residual Blocks Inception Blocks Batch Normalization Fully Convolutional Networks
- 35. Автоэнкодер Нейросеть + Нейросеть наоборот = Автоэнкодер
- 36. Автоэнкодер Нейросеть + Нейросеть наоборот = Автоэнкодер Если сигнал на выходе будет близок ко входу, то
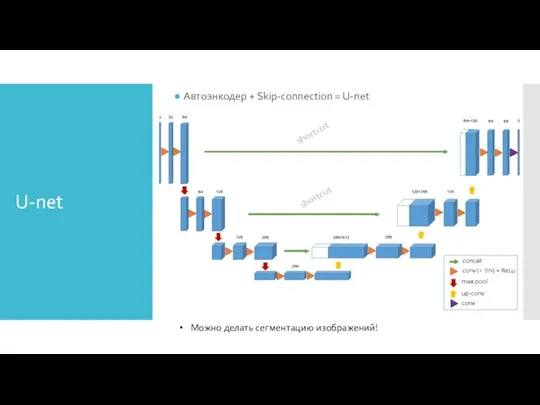
- 37. U-net Автоэнкодер + Skip-connection = U-net shortcut shortcut Можно делать сегментацию изображений!
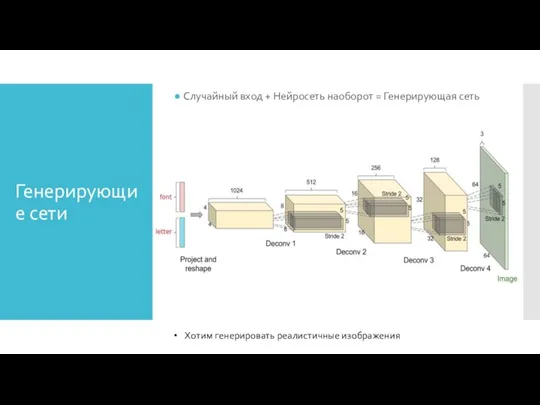
- 38. Генерирующие сети Случайный вход + Нейросеть наоборот = Генерирующая сеть Хотим генерировать реалистичные изображения
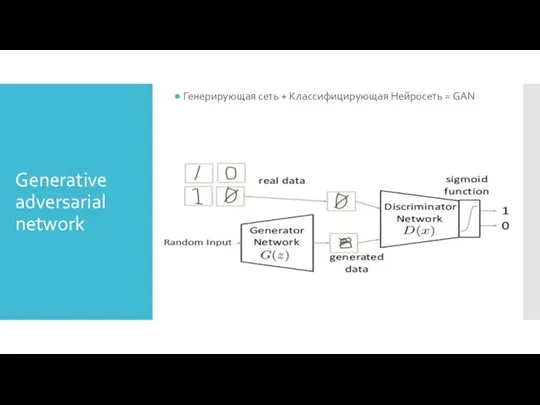
- 39. Generative adversarial network Генерирующая сеть + Классифицирующая Нейросеть = GAN
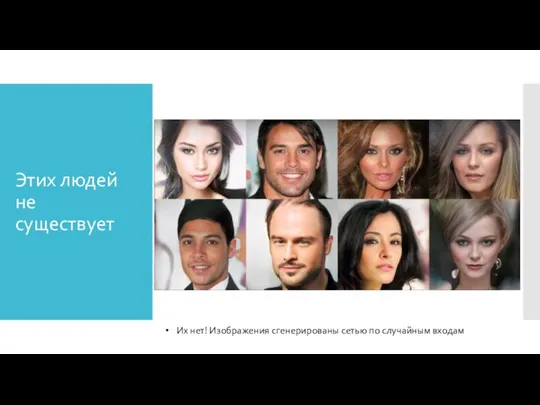
- 40. Этих людей не существует Их нет! Изображения сгенерированы сетью по случайным входам
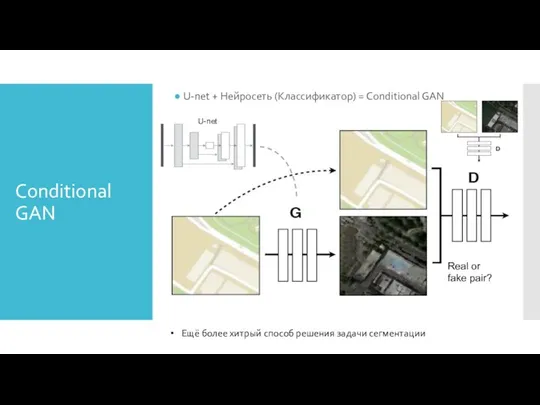
- 41. Conditional GAN U-net + Нейросеть (Классификатор) = Conditional GAN Real or fake pair? U-net Ещё более
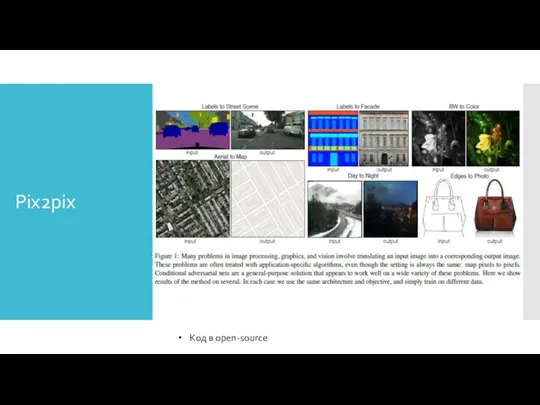
- 42. Pix2pix Код в open-source
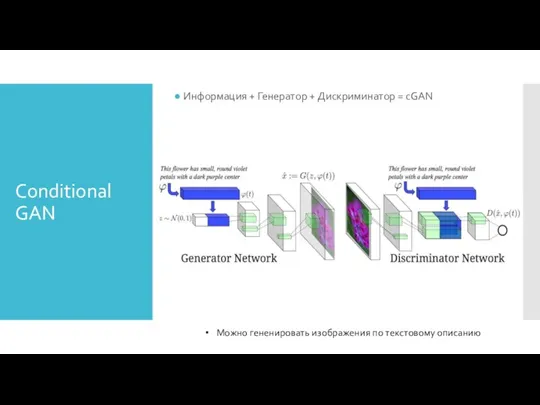
- 43. Conditional GAN Информация + Генератор + Дискриминатор = cGAN Можно гененировать изображения по текстовому описанию
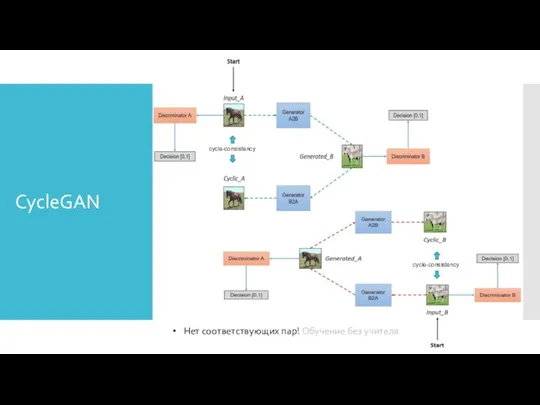
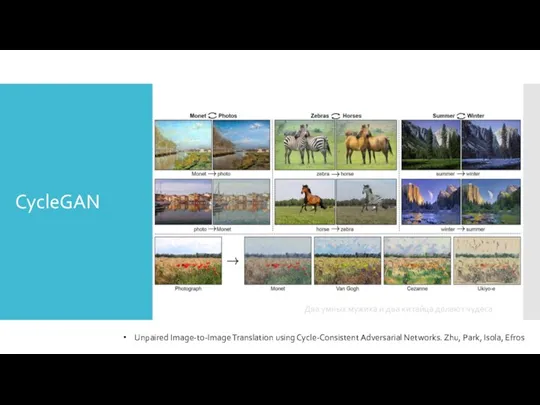
- 44. CycleGAN cycle-consistency cycle-consistency Нет соответствующих пар! Обучение без учителя
- 45. CycleGAN Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. Zhu, Park, Isola, Efros Два умных мужика и
- 46. Паровоз ещё не уехал! Новые архитектуры и модели впереди!
- 47. Мои проекты ФГУП "ГосНИИАС" (ГНЦ РФ) (Кафедра управляющих и информационных систем МФТИ) Лаборатория гибридных интеллектуальных систем
- 48. Магазин будущего
- 49. Магазин будущего Детектирование товаров Трекинг товаров Распознавание действий и позы покупателей Идентификация покупателей Трекинг покупателей по
- 50. Семантическая сегментация аэро- и космоснимков
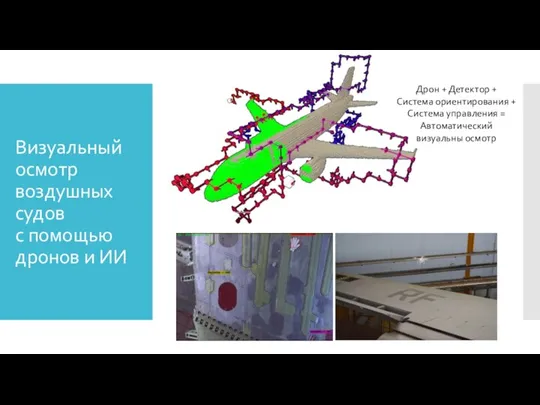
- 51. Визуальный осмотр воздушных судов с помощью дронов и ИИ Дрон + Детектор + Система ориентирования +
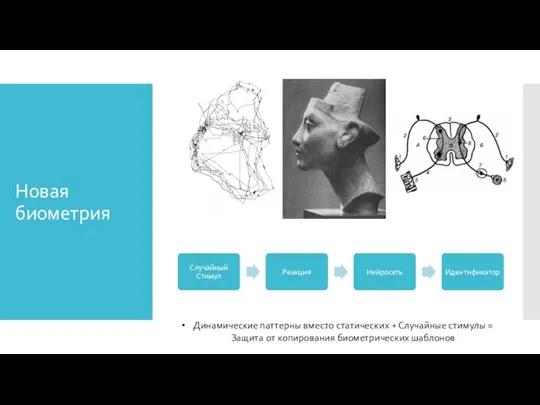
- 52. Новая биометрия Динамические паттерны вместо статических + Случайные стимулы = Защита от копирования биометрических шаблонов
- 54. Скачать презентацию
Слайд 2Компьютерное зрение
Распознавание образов
Компьютерное зрение
Фотограм-
метрия
Машинное
зрение
Глубокое
обучение
Машинное
обучение
Компьютерное зрение
Распознавание образов
Компьютерное зрение
Фотограм-
метрия
Машинное
зрение
Глубокое
обучение
Машинное
обучение
Слайд 3Примеры задач
Распознавание автомобильных номеров
Классификация изображений
Выявление движущихся объектов на видео, слежение
Создание панорам из
Примеры задач
Распознавание автомобильных номеров
Классификация изображений
Выявление движущихся объектов на видео, слежение
Создание панорам из
Слайд 4Пример:
Задача выделения объектов
Задача: выделить объекты, определив порог бинаризации
Низкий порог
Высокий порог
Пример:
Задача выделения объектов
Задача: выделить объекты, определив порог бинаризации
Низкий порог
Высокий порог
Слайд 5Яркости пикселей объектов и фона имеют различное распределение
Гипотеза
Яркости пикселей объектов и фона имеют различное распределение
Гипотеза
Слайд 6Модель
Бимодальное распределение
Модель
Бимодальное распределение
Слайд 7Метод Оцу
Идея: найти порог оптимальным образом, так чтобы минимизировать дисперсию внутри одного
Метод Оцу
Идея: найти порог оптимальным образом, так чтобы минимизировать дисперсию внутри одного
Слайд 8Пример
Задача: разделить изображение на области так чтобы каждая область соответствовала одному объекту
Пример
Задача: разделить изображение на области так чтобы каждая область соответствовала одному объекту

Слайд 9Соседние пикселы внутри одного объекта мало различаются по яркости
Гипотеза
Соседние пикселы внутри одного объекта мало различаются по яркости
Гипотеза
Слайд 10Модель
Неориентированный граф. Вершины - это все пиксели. Рёбра ставятся между соседними пикселями. Чем больше
Модель
Неориентированный граф. Вершины - это все пиксели. Рёбра ставятся между соседними пикселями. Чем больше
Слайд 11Метод
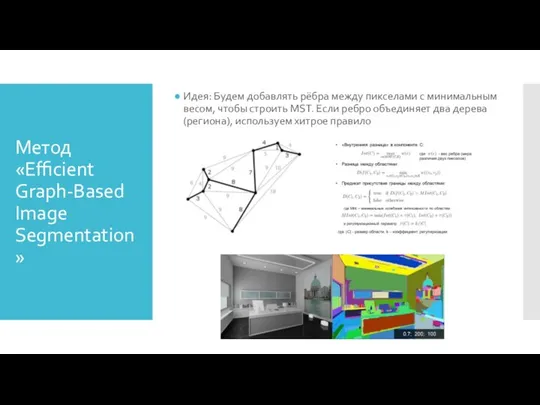
«Efficient Graph-Based Image Segmentation»
Идея: Будем добавлять рёбра между пикселами с минимальным весом,
Метод
«Efficient Graph-Based Image Segmentation»
Идея: Будем добавлять рёбра между пикселами с минимальным весом,
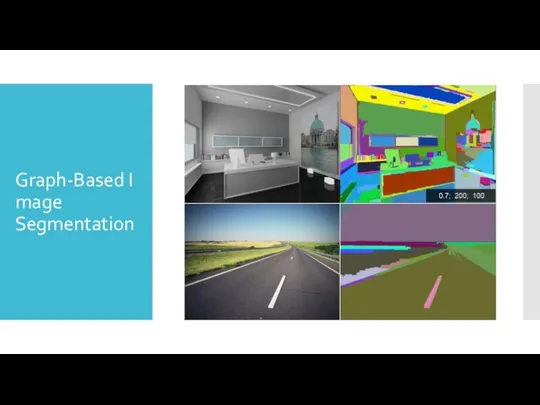
Слайд 12Graph-Based Image
Segmentation
Graph-Based Image
Segmentation
Слайд 13Пример
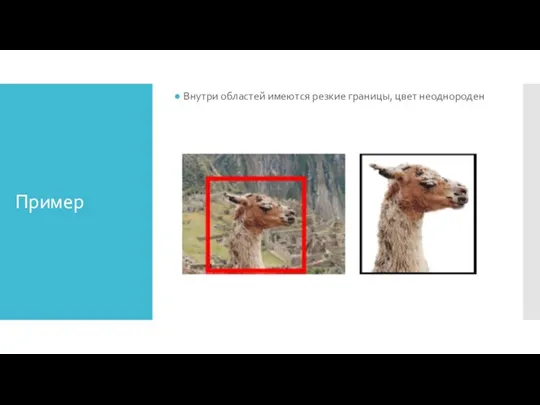
Внутри областей имеются резкие границы, цвет неоднороден
Пример
Внутри областей имеются резкие границы, цвет неоднороден
Слайд 14Будем штрафовать точки границы, чтобы она была только там где точно необходимо
Гипотеза
Будем штрафовать точки границы, чтобы она была только там где точно необходимо
Гипотеза
Слайд 15Модель
Условные/марковские случайные поля
Скрытые переменные
Наблюдаемые переменные
Вероятностная модель связей
Модель
Условные/марковские случайные поля
Скрытые переменные
Наблюдаемые переменные
Вероятностная модель связей
Слайд 16Метод GrubCut
Идея: представим картинку как граф, веса рёбер зададим в соответствии с
Метод GrubCut
Идея: представим картинку как граф, веса рёбер зададим в соответствии с
Слайд 17Пример
На изображении много областей, они относительно однородны
Пример
На изображении много областей, они относительно однородны
Слайд 18Пикселы одного объекта близки в пространстве
яркость-координата
Гипотеза
Пикселы одного объекта близки в пространстве
яркость-координата
Гипотеза
Слайд 19Модель
Кластеры в многомерном пространстве (RGB-XY)
Модель
Кластеры в многомерном пространстве (RGB-XY)
Слайд 20Метод
Mean-Shift
Идея: Сопоставим пикселам изображения точки в пространстве RGBXY. Выполним оценку среднего
Метод
Mean-Shift
Идея: Сопоставим пикселам изображения точки в пространстве RGBXY. Выполним оценку среднего
Слайд 21Mean-Shift
Mean-Shift
Слайд 22Совсем сложный пример
Совсем сложный пример

Слайд 23Нейросети могут всё!
Гипотеза
Нейросети могут всё!
Гипотеза
Слайд 24Модель
Модель придумывать не будем
Соберём побольше данных и закинем в нейросеть
...
Profit!!!
Модель
Модель придумывать не будем
Соберём побольше данных и закинем в нейросеть
...
Profit!!!
Слайд 25Нейронные сети
Эволюция архитектур
Нейронные сети
Эволюция архитектур
Слайд 26Линейный классификатор
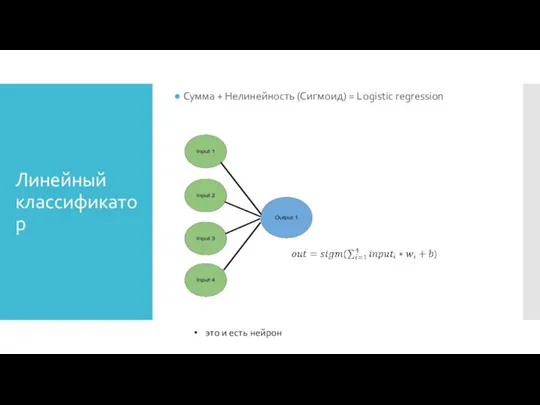
Сумма + Нелинейность (Сигмоид) = Logistic regression
это и есть нейрон
Линейный классификатор
Сумма + Нелинейность (Сигмоид) = Logistic regression
это и есть нейрон
Слайд 27Нейронные сети
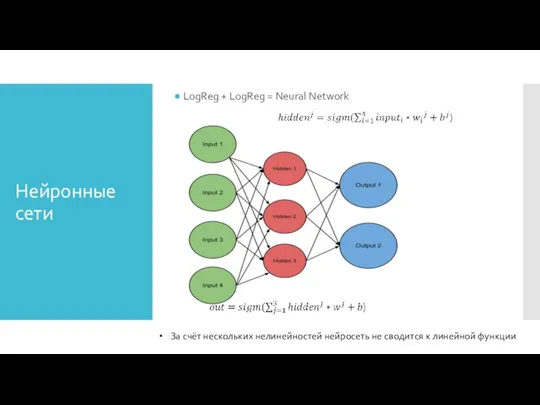
LogReg + LogReg = Neural Network
За счёт нескольких нелинейностей нейросеть не
Нейронные сети
LogReg + LogReg = Neural Network
За счёт нескольких нелинейностей нейросеть не
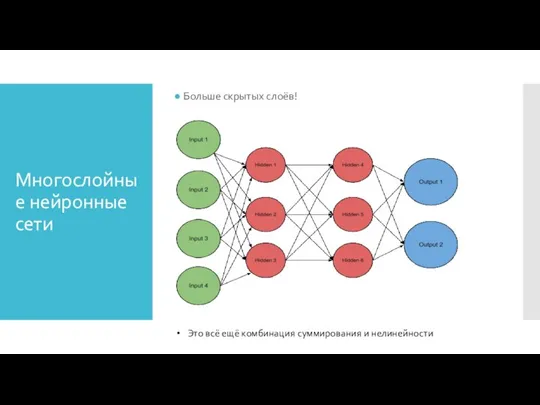
Слайд 28Многослойные нейронные сети
Больше скрытых слоёв!
Это всё ещё комбинация суммирования и нелинейности
Многослойные нейронные сети
Больше скрытых слоёв!
Это всё ещё комбинация суммирования и нелинейности
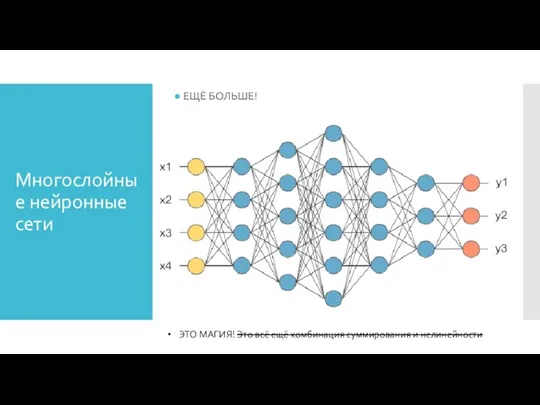
Слайд 29Многослойные нейронные сети
ЕЩЁ БОЛЬШЕ!
ЭТО МАГИЯ! Это всё ещё комбинация суммирования и нелинейности
Многослойные нейронные сети
ЕЩЁ БОЛЬШЕ!
ЭТО МАГИЯ! Это всё ещё комбинация суммирования и нелинейности
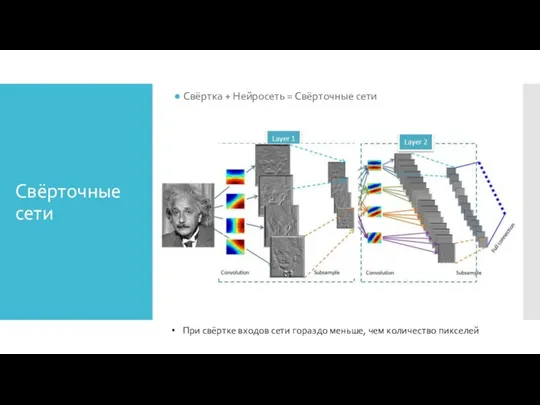
Слайд 30Свёрточные сети
Свёртка + Нейросеть = Свёрточные сети
При свёртке входов сети гораздо меньше,
Свёрточные сети
Свёртка + Нейросеть = Свёрточные сети
При свёртке входов сети гораздо меньше,
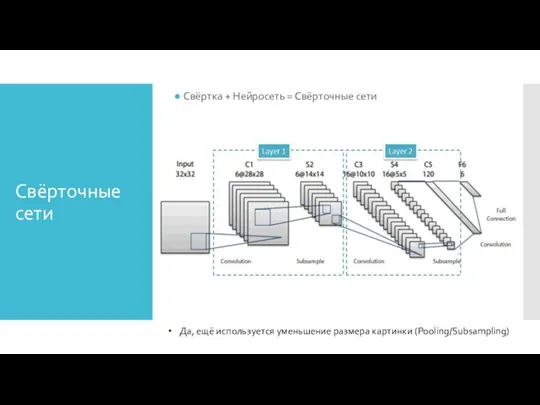
Слайд 31Свёрточные сети
Свёртка + Нейросеть = Свёрточные сети
Да, ещё используется уменьшение размера картинки
Свёрточные сети
Свёртка + Нейросеть = Свёрточные сети
Да, ещё используется уменьшение размера картинки
Слайд 32Свёрточные сети
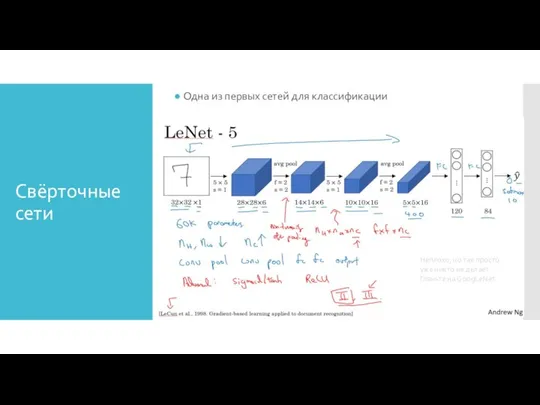
Одна из первых сетей для классификации
Неплохо, но так просто
уже никто не
Свёрточные сети
Одна из первых сетей для классификации
Неплохо, но так просто уже никто не
Слайд 33Применение
Классификация
Регрессия
Детектирование
Обучение представлений (Embeddings)
…
Применение
Классификация
Регрессия
Детектирование
Обучение представлений (Embeddings)
…
Слайд 34За кадром
ReLU
Dropout
1x1 convolution
Residual Blocks
Inception Blocks
Batch Normalization
Fully Convolutional Networks
За кадром
ReLU
Dropout
1x1 convolution
Residual Blocks
Inception Blocks
Batch Normalization
Fully Convolutional Networks

Слайд 35Автоэнкодер
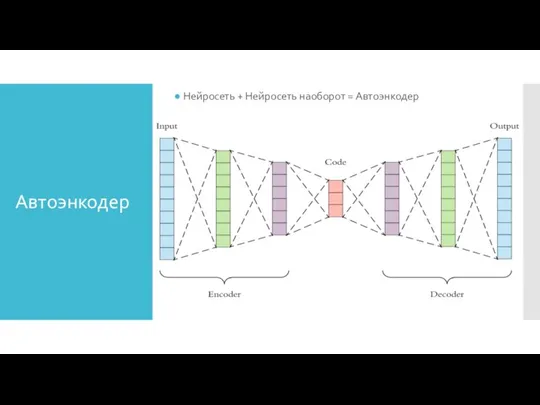
Нейросеть + Нейросеть наоборот = Автоэнкодер
Автоэнкодер
Нейросеть + Нейросеть наоборот = Автоэнкодер
Слайд 36Автоэнкодер
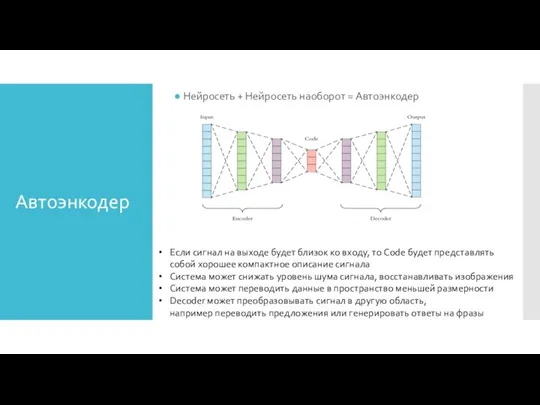
Нейросеть + Нейросеть наоборот = Автоэнкодер
Если сигнал на выходе будет близок ко
Автоэнкодер
Нейросеть + Нейросеть наоборот = Автоэнкодер
Если сигнал на выходе будет близок ко
Слайд 37U-net
Автоэнкодер + Skip-connection = U-net
shortcut
shortcut
Можно делать сегментацию изображений!
U-net
Автоэнкодер + Skip-connection = U-net
shortcut
shortcut
Можно делать сегментацию изображений!
Слайд 38Генерирующие сети
Случайный вход + Нейросеть наоборот = Генерирующая сеть
Хотим генерировать реалистичные изображения
Генерирующие сети
Случайный вход + Нейросеть наоборот = Генерирующая сеть
Хотим генерировать реалистичные изображения
Слайд 39Generative adversarial network
Генерирующая сеть + Классифицирующая Нейросеть = GAN
Generative adversarial network
Генерирующая сеть + Классифицирующая Нейросеть = GAN
Слайд 40Этих людей не существует
Их нет! Изображения сгенерированы сетью по случайным входам
Этих людей не существует
Их нет! Изображения сгенерированы сетью по случайным входам
Слайд 41Conditional GAN
U-net + Нейросеть (Классификатор) = Conditional GAN
Real or
fake pair?
U-net
Ещё более
Conditional GAN
U-net + Нейросеть (Классификатор) = Conditional GAN
Real or
fake pair?
U-net
Ещё более
Слайд 42Pix2pix
Код в open-source
Pix2pix
Код в open-source
Слайд 43Conditional GAN
Информация + Генератор + Дискриминатор = cGAN
Можно гененировать изображения по текстовому
Conditional GAN
Информация + Генератор + Дискриминатор = cGAN
Можно гененировать изображения по текстовому
Слайд 44CycleGAN
cycle-consistency
cycle-consistency
Нет соответствующих пар! Обучение без учителя
CycleGAN
cycle-consistency
cycle-consistency
Нет соответствующих пар! Обучение без учителя
Слайд 45CycleGAN
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. Zhu, Park, Isola, Efros
Два умных
CycleGAN
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. Zhu, Park, Isola, Efros
Два умных
Слайд 46Паровоз ещё не уехал!
Новые архитектуры и модели впереди!
Паровоз ещё не уехал!
Новые архитектуры и модели впереди!
Слайд 47Мои проекты
ФГУП "ГосНИИАС" (ГНЦ РФ)
(Кафедра управляющих и информационных систем МФТИ)
Лаборатория гибридных интеллектуальных
Мои проекты
ФГУП "ГосНИИАС" (ГНЦ РФ)
(Кафедра управляющих и информационных систем МФТИ)
Лаборатория гибридных интеллектуальных

Слайд 48Магазин будущего
Магазин будущего

Слайд 49Магазин будущего
Детектирование товаров
Трекинг товаров
Распознавание действий и позы покупателей
Идентификация покупателей
Трекинг покупателей по залу
Составление виртуальной
Магазин будущего
Детектирование товаров
Трекинг товаров
Распознавание действий и позы покупателей
Идентификация покупателей
Трекинг покупателей по залу
Составление виртуальной
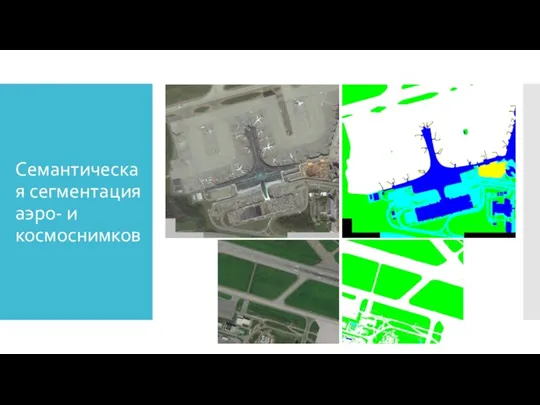
Слайд 50Семантическая сегментация аэро- и космоснимков
Семантическая сегментация аэро- и космоснимков
Слайд 51Визуальный осмотр воздушных судов
с помощью дронов и ИИ
Дрон + Детектор +
Визуальный осмотр воздушных судов
с помощью дронов и ИИ
Дрон + Детектор +
Слайд 52Новая
биометрия
Динамические паттерны вместо статических + Случайные стимулы = Защита от копирования биометрических
Новая
биометрия
Динамические паттерны вместо статических + Случайные стимулы = Защита от копирования биометрических
 Computer system architecture
Computer system architecture Средства ориентации в зданиях
Средства ориентации в зданиях Вычислительные системы и сети
Вычислительные системы и сети Информационная безопасность. Урок №2
Информационная безопасность. Урок №2 История вычислительных сетей Автор Skyfury Sparkle
История вычислительных сетей Автор Skyfury Sparkle Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Открытая галерея закрытых городов в живых историях
Открытая галерея закрытых городов в живых историях Smart City Neom
Smart City Neom 7 ways intelligent itsm can help you - storyboard
7 ways intelligent itsm can help you - storyboard Миграция для Notes в Exchange
Миграция для Notes в Exchange Дистанционная коммуникация
Дистанционная коммуникация Позиционные системы счисления
Позиционные системы счисления Основы работы с информацией. Часть 2. Тема 1.2
Основы работы с информацией. Часть 2. Тема 1.2 Электронные таблицы
Электронные таблицы Лекция 2
Лекция 2 Интернешка лабиринты. Интерактивная игра
Интернешка лабиринты. Интерактивная игра Программирование в Visual C++
Программирование в Visual C++ Современные технологии
Современные технологии 3D модели
3D модели Телекоммуникационные сети. Сетевой трафик
Телекоммуникационные сети. Сетевой трафик Анимация объектов. Microsoft PowerPoint
Анимация объектов. Microsoft PowerPoint Информационные технологии. Тема 1.3
Информационные технологии. Тема 1.3 11u-2_Моделирование
11u-2_Моделирование Smartnet 24. Продвижение товаров и услуг в интернете
Smartnet 24. Продвижение товаров и услуг в интернете Web-программирование. Основы Node.js
Web-программирование. Основы Node.js Современный дизайн. Место дизайна в современном мире. Тренды в графическом дизайне 2021 г
Современный дизайн. Место дизайна в современном мире. Тренды в графическом дизайне 2021 г Системы счисления
Системы счисления Линейные списки
Линейные списки