- Корреляционные методы. Модель формирования изображения

Содержание
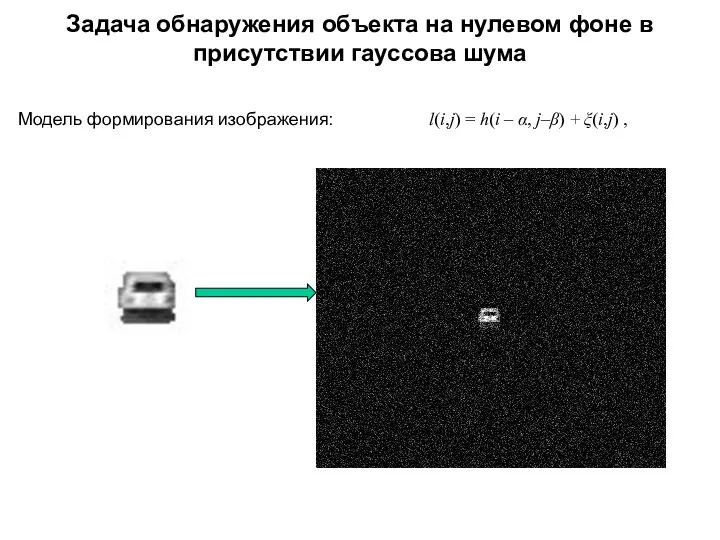
- 2. Задача обнаружения объекта на нулевом фоне в присутствии гауссова шума l(i,j) = h(i – α, j–β)
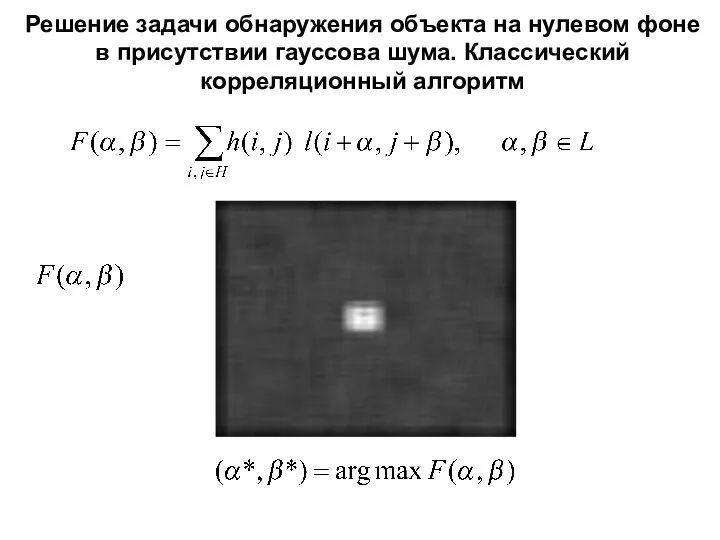
- 3. Решение задачи обнаружения объекта на нулевом фоне в присутствии гауссова шума. Классический корреляционный алгоритм
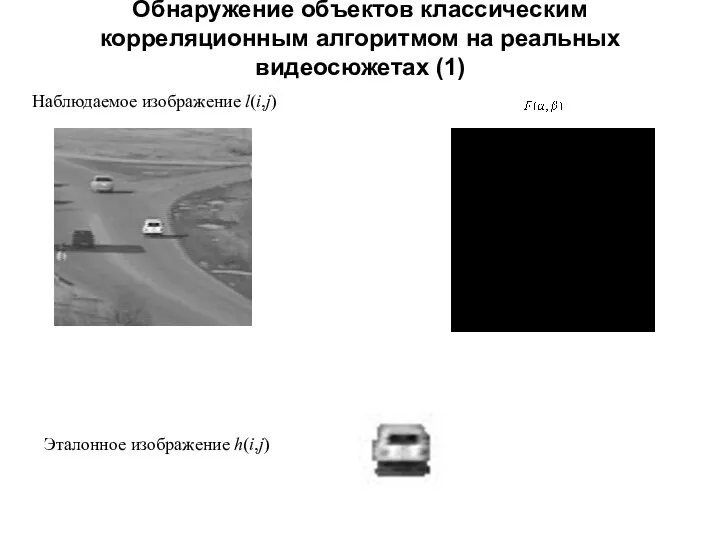
- 4. Обнаружение объектов классическим корреляционным алгоритмом на реальных видеосюжетах (1) Эталонное изображение h(i,j) Наблюдаемое изображение l(i,j)
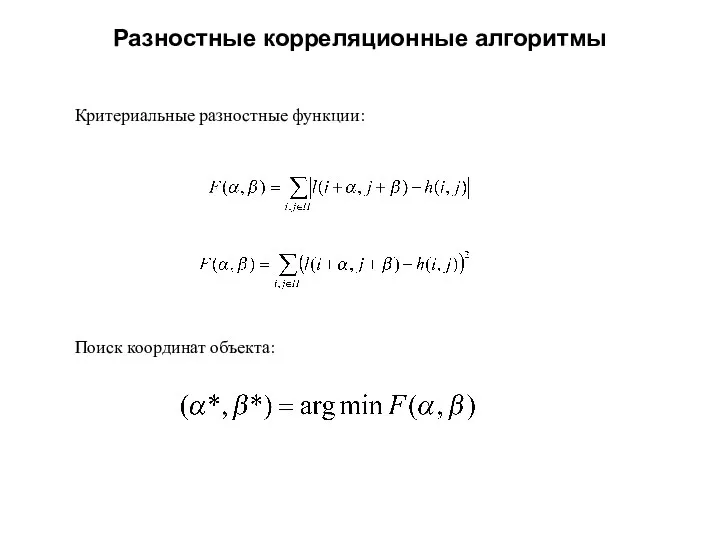
- 5. Критериальные разностные функции: Разностные корреляционные алгоритмы Поиск координат объекта:
- 6. Обнаружение объектов разностным алгоритмом на реальных видеосюжетах Эталонное изображение h(i,j) Наблюдаемое изображение l(i,j)
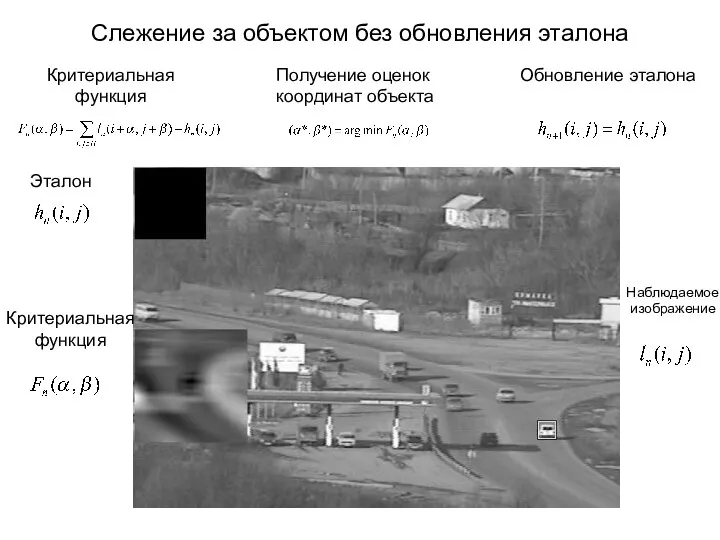
- 7. Слежение за объектом без обновления эталона Критериальная функция Получение оценок координат объекта Обновление эталона Эталон Наблюдаемое
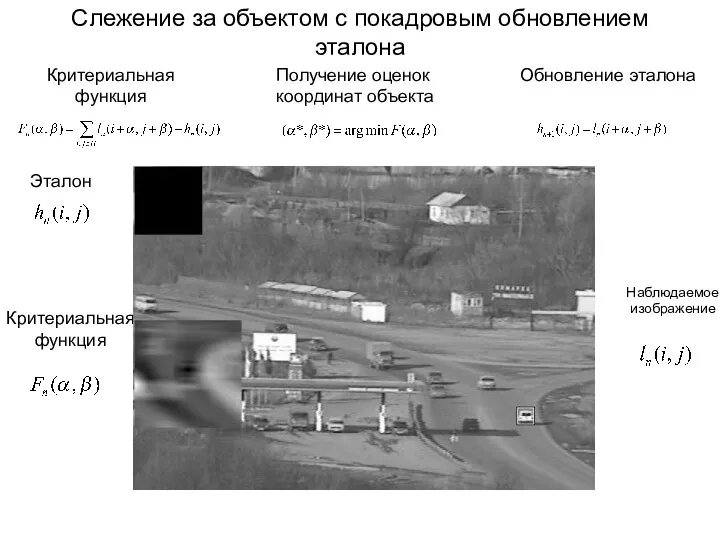
- 8. Слежение за объектом с покадровым обновлением эталона Критериальная функция Получение оценок координат объекта Обновление эталона Эталон
- 10. Скачать презентацию
Слайд 3Решение задачи обнаружения объекта на нулевом фоне в присутствии гауссова шума. Классический
Решение задачи обнаружения объекта на нулевом фоне в присутствии гауссова шума. Классический
Слайд 4Обнаружение объектов классическим корреляционным алгоритмом на реальных видеосюжетах (1)
Эталонное изображение h(i,j)
Наблюдаемое изображение
Обнаружение объектов классическим корреляционным алгоритмом на реальных видеосюжетах (1)
Эталонное изображение h(i,j)
Наблюдаемое изображение
Слайд 5 Критериальные разностные функции:
Разностные корреляционные алгоритмы
Поиск координат объекта:
Критериальные разностные функции:
Разностные корреляционные алгоритмы
Поиск координат объекта:
Слайд 6Обнаружение объектов разностным алгоритмом на реальных видеосюжетах
Эталонное изображение h(i,j)
Наблюдаемое изображение l(i,j)
Обнаружение объектов разностным алгоритмом на реальных видеосюжетах
Эталонное изображение h(i,j)
Наблюдаемое изображение l(i,j)

Слайд 7Слежение за объектом без обновления эталона
Критериальная
функция
Получение оценок
координат объекта
Обновление эталона
Эталон
Наблюдаемое
изображение
Критериальная
Слежение за объектом без обновления эталона
Критериальная
функция
Получение оценок
координат объекта
Обновление эталона
Эталон
Наблюдаемое
изображение
Критериальная
Слайд 8Слежение за объектом с покадровым обновлением эталона
Критериальная
функция
Получение оценок
координат объекта
Обновление эталона
Эталон
Наблюдаемое
Слежение за объектом с покадровым обновлением эталона
Критериальная
функция
Получение оценок
координат объекта
Обновление эталона
Эталон
Наблюдаемое
 Інтимні селфі в інтернеті - жарт чи ризик?
Інтимні селфі в інтернеті - жарт чи ризик? Глобальная компьютерная сеть Интернет. 10 класс
Глобальная компьютерная сеть Интернет. 10 класс Линейное программирование
Линейное программирование Рендеры
Рендеры Финальный проект на Mit App Inventor
Финальный проект на Mit App Inventor Игрофикация
Игрофикация 7-1-2
7-1-2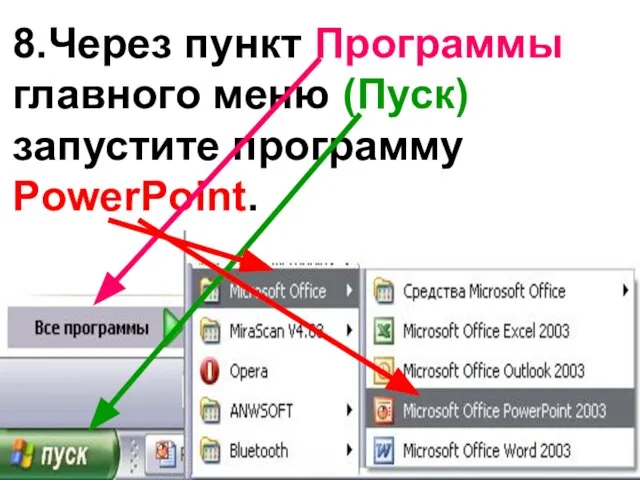 Программа PowerPoint
Программа PowerPoint Анализ программ с циклом
Анализ программ с циклом Синтаксис
Синтаксис Операционная система Windows
Операционная система Windows Физические основы компьютерной графики. Зрение, спектр, цвет, свет, цветовые модели. Лекция №2
Физические основы компьютерной графики. Зрение, спектр, цвет, свет, цветовые модели. Лекция №2 Основы программирования на языке Python
Основы программирования на языке Python Процедуры и функции. Заголовок и тело процедур и функций, классификация параметров. Вызов процедур и функций. Лекция 9
Процедуры и функции. Заголовок и тело процедур и функций, классификация параметров. Вызов процедур и функций. Лекция 9 Электронные таблицы (на примере Exсel)
Электронные таблицы (на примере Exсel) Связь в небоскрёбах
Связь в небоскрёбах On-line сервисы
On-line сервисы Динамічні КМ БПКС (комутатори з просторовим розподілом)
Динамічні КМ БПКС (комутатори з просторовим розподілом) Командная разработка программных средств
Командная разработка программных средств The concept of information technology
The concept of information technology Нежурналистика. Медиа Школа Экономического факультета
Нежурналистика. Медиа Школа Экономического факультета Visual Rare Studio. Веб-студия дизайна, разработки и продвижения сайтов
Visual Rare Studio. Веб-студия дизайна, разработки и продвижения сайтов Классификация программного обеспечения
Классификация программного обеспечения Системное программирование. Работа с файлами в Windows API
Системное программирование. Работа с файлами в Windows API Почему программисты через 10 лет будут не нужны?
Почему программисты через 10 лет будут не нужны? Архитектура ПК лекция
Архитектура ПК лекция Основы логики (упражнения)
Основы логики (упражнения) Оценка эффективности информационной системы
Оценка эффективности информационной системы