- Математические модели

Содержание
- 2. 2.1. Что нужно знать для управления? Цель любого управления – изменить состояние объекта нужным образом (в
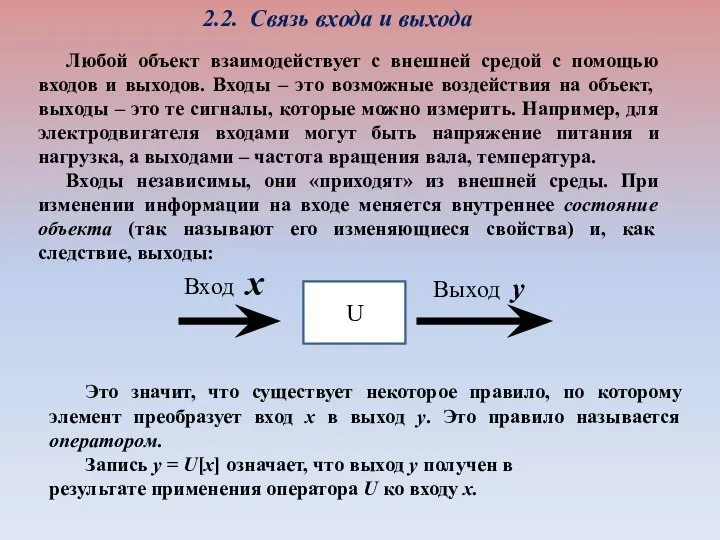
- 3. 2.2. Связь входа и выхода Любой объект взаимодействует с внешней средой с помощью входов и выходов.
- 4. Построить модель – это значит найти оператор, связывающий входы и выходы. С его помощью можно предсказать
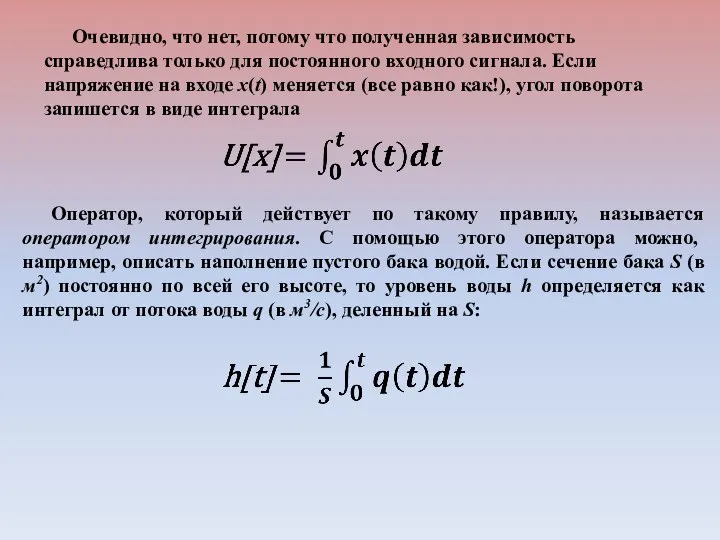
- 5. Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Если напряжение на
- 6. Обратный оператор – оператор дифференцирования – вычисляет производную: Данный оператор играет очень важную роль в описании
- 7. Где встречаются такие операторы? Приведем примеры из электротехники. Например, известно, что ток i ( в амперах),
- 8. Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на практике. Чтобы понять это
- 9. 2.3. Как строятся модели? Во-первых, математические модели могут быть получены теоретически из законов физики (законы сохранения
- 10. Первое уравнение означает, что разность потенциалов на концах RLC-цепочки равна сумме разностей потенциалов на всех промежуточных
- 11. На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход и выход) определяется из
- 12. С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», которые кажутся разработчику маловажными. Для упрощенной
- 13. 2.4. Линейность и нелинейность Из школьной математики известно, что проще всего решать линейные уравнения. С нелинейными
- 14. Однако, все модели реальных систем – нелинейные. Это легко понять хотя бы потому, что всегда есть
- 15. Нужно отметить, что если объект или привод имеют так называемую «существенную» не-линейность, этот подход может не
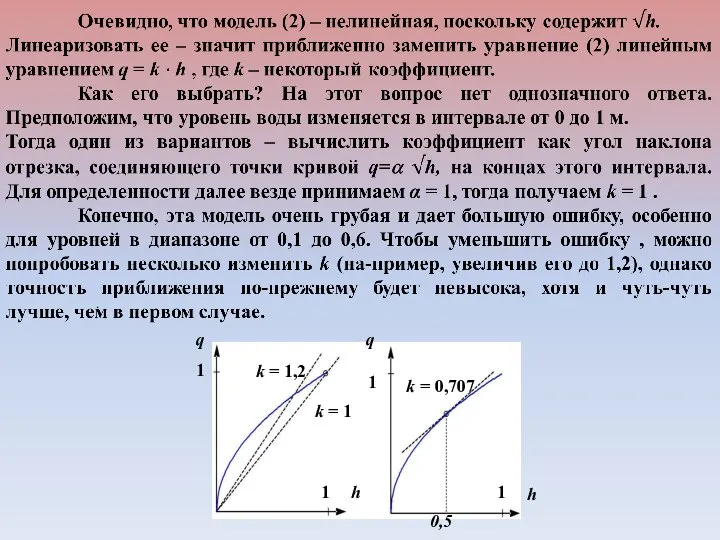
- 16. 2.5. Линеаризация уравнений Мы уже отметили, что в теории управления лучше всего разработаны методы исследования линейных
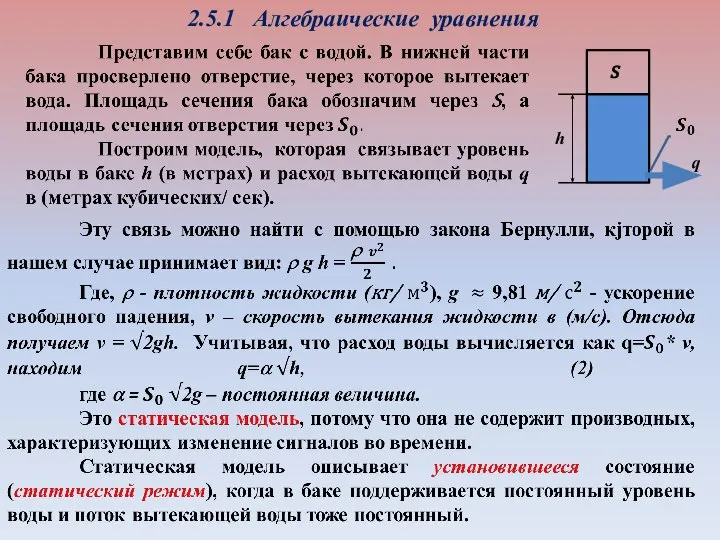
- 17. 2.5.1 Алгебраические уравнения h S q
- 18. . q q h h 1 1 1 1 k = 1 k = 1,2 k
- 19. q q h h 1 1 1 1 k = 1 k = 1,2 k =
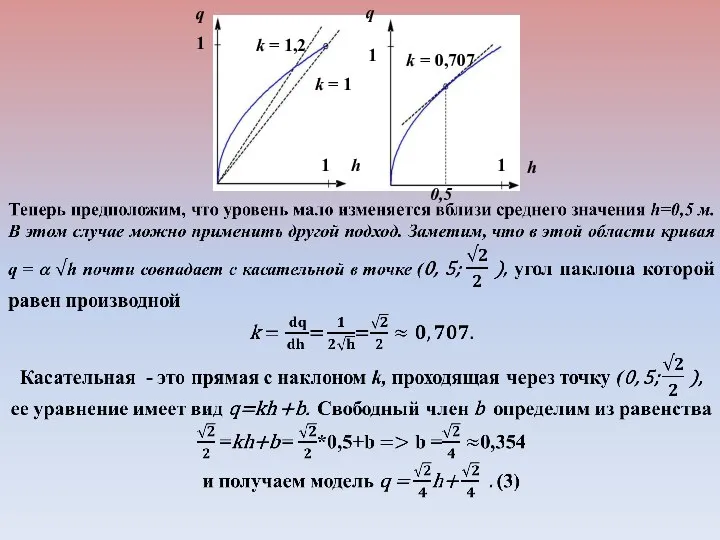
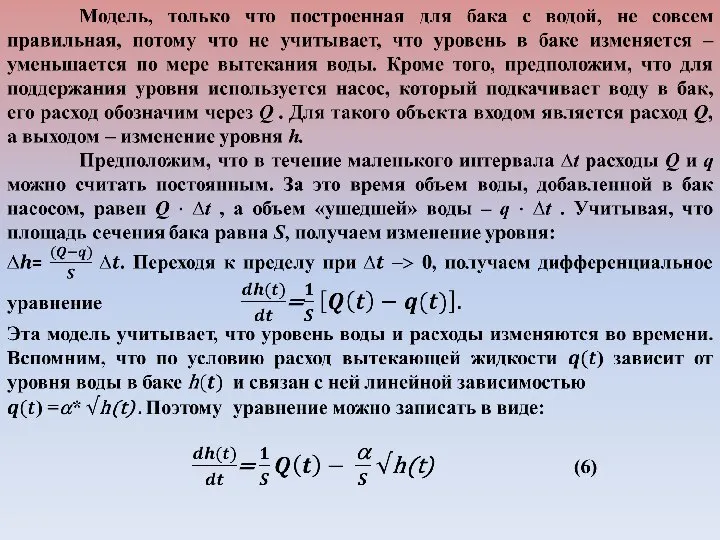
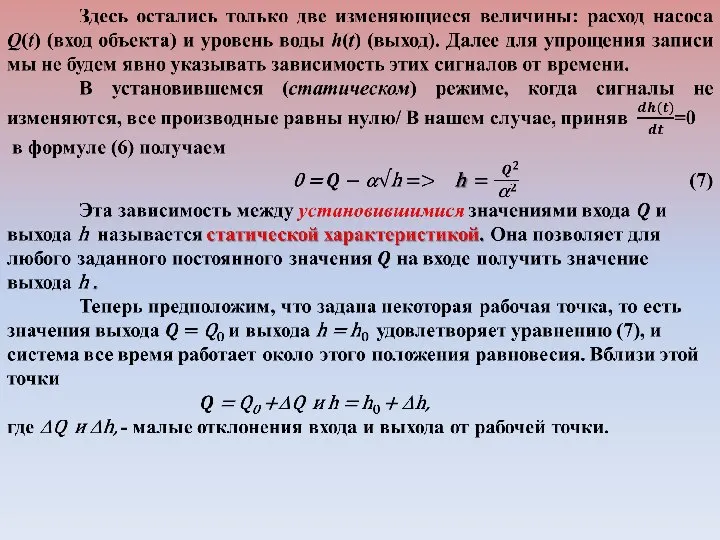
- 21. 2.5.2 Дифференциальные уравнения Реальные объекты не могут мгновенно изменять свое состояние, поэтому вместо статических моделей типа
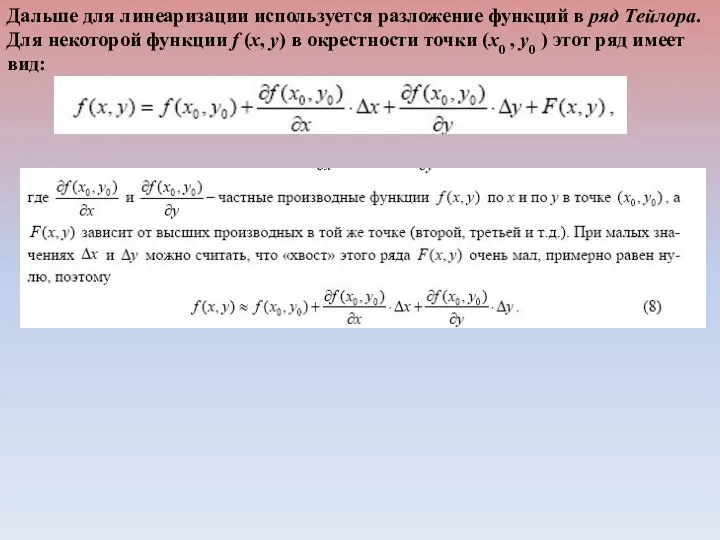
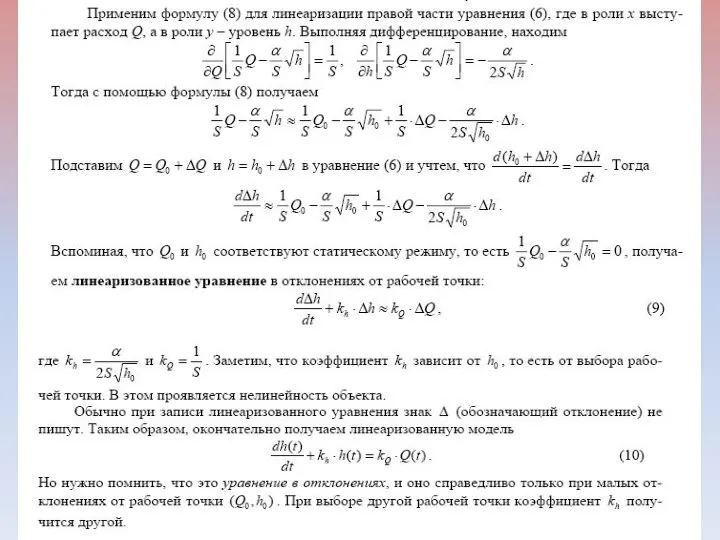
- 24. Дальше для линеаризации используется разложение функций в ряд Тейлора. Для некоторой функции f (x, y) в
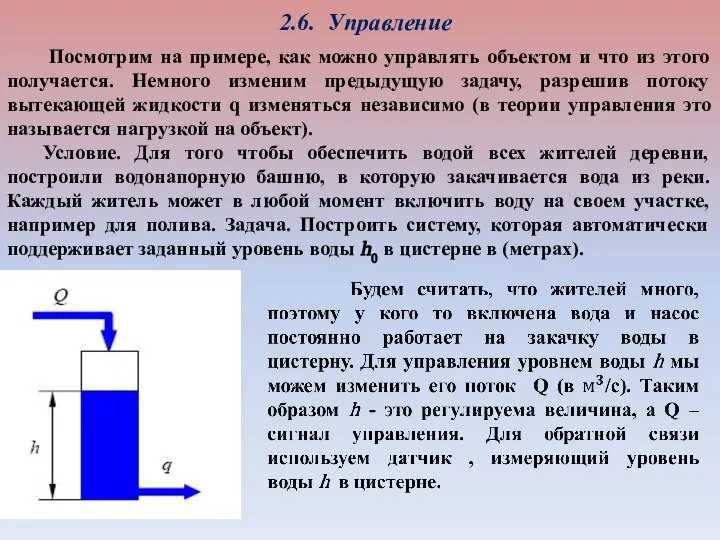
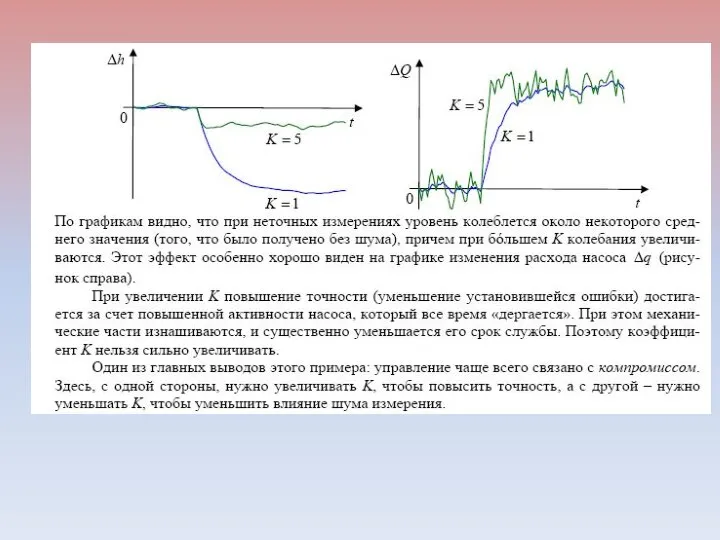
- 26. 2.6. Управление Посмотрим на примере, как можно управлять объектом и что из этого получается. Немного изменим
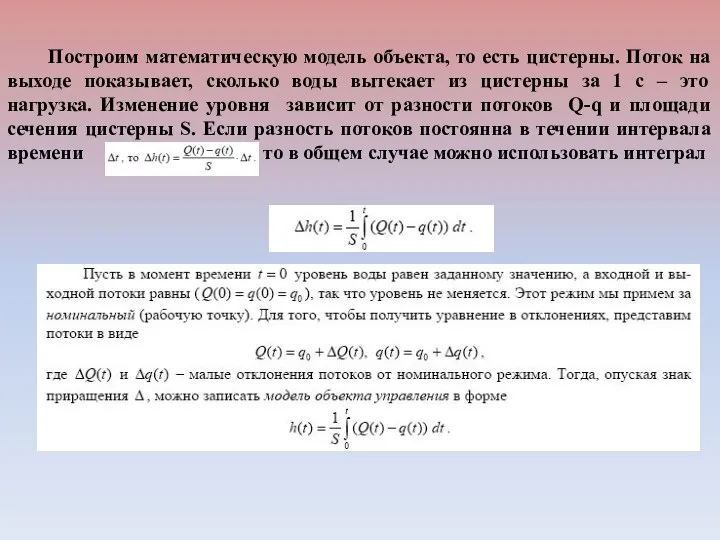
- 27. Построим математическую модель объекта, то есть цистерны. Поток на выходе показывает, сколько воды вытекает из цистерны
- 32. Скачать презентацию
Слайд 32.2. Связь входа и выхода
Любой объект взаимодействует с внешней средой с помощью
2.2. Связь входа и выхода
Любой объект взаимодействует с внешней средой с помощью
Слайд 4Построить модель – это значит найти оператор, связывающий входы и выходы. С
Построить модель – это значит найти оператор, связывающий входы и выходы. С
Слайд 5Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного
Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного
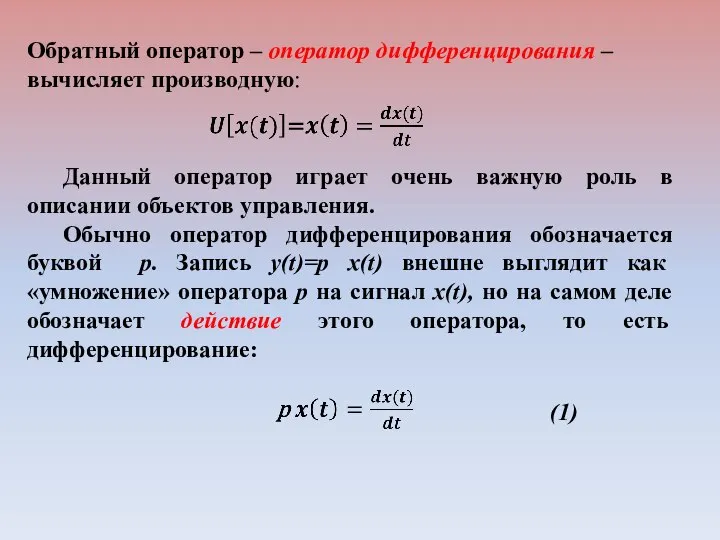
Слайд 6Обратный оператор – оператор дифференцирования – вычисляет производную:
Данный оператор играет очень важную
Обратный оператор – оператор дифференцирования – вычисляет производную:
Данный оператор играет очень важную
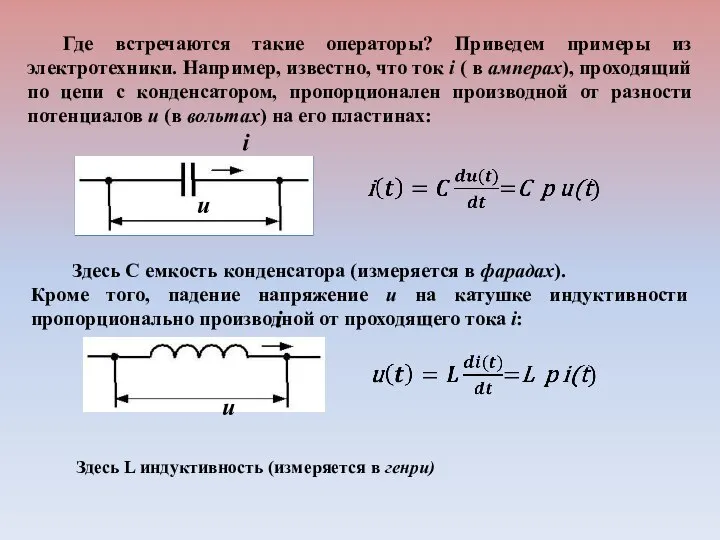
Слайд 7 Где встречаются такие операторы? Приведем примеры из электротехники. Например, известно, что ток
Где встречаются такие операторы? Приведем примеры из электротехники. Например, известно, что ток
Слайд 8 Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на
Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на
Слайд 9 2.3. Как строятся модели?
Во-первых, математические модели могут быть получены теоретически из
2.3. Как строятся модели?
Во-первых, математические модели могут быть получены теоретически из
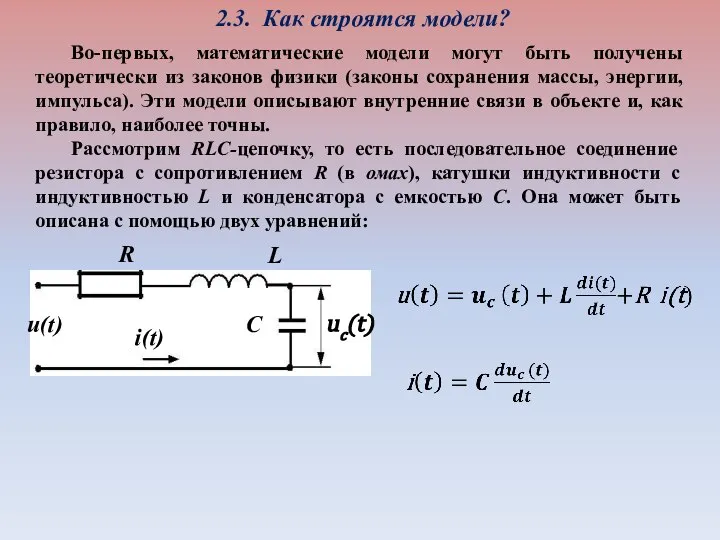
Слайд 10 Первое уравнение означает, что разность потенциалов на концах RLC-цепочки равна сумме разностей
Первое уравнение означает, что разность потенциалов на концах RLC-цепочки равна сумме разностей
Слайд 11 На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход
На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход
Слайд 12 С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», которые
С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», которые
Слайд 13 2.4. Линейность и нелинейность
Из школьной математики известно, что проще всего решать
2.4. Линейность и нелинейность
Из школьной математики известно, что проще всего решать
Слайд 14 Однако, все модели реальных систем – нелинейные. Это легко понять хотя бы
Однако, все модели реальных систем – нелинейные. Это легко понять хотя бы
Слайд 15 Нужно отметить, что если объект или привод имеют так называемую «существенную» не-линейность,
Нужно отметить, что если объект или привод имеют так называемую «существенную» не-линейность,
Слайд 16 2.5. Линеаризация уравнений
Мы уже отметили, что в теории управления лучше всего
2.5. Линеаризация уравнений
Мы уже отметили, что в теории управления лучше всего
Слайд 17 2.5.1 Алгебраические уравнения
h
S
q
2.5.1 Алгебраические уравнения
h
S
q
Слайд 18
.
q
q
h
h
1
1
1
1
k = 1
k = 1,2
k = 0,707
0,5
.
q
q
h
h
1
1
1
1
k = 1
k = 1,2
k = 0,707
0,5
Слайд 19q
q
h
h
1
1
1
1
k = 1
k = 1,2
k = 0,707
0,5
q
q
h
h
1
1
1
1
k = 1
k = 1,2
k = 0,707
0,5
Слайд 21 2.5.2 Дифференциальные уравнения
Реальные объекты не могут мгновенно изменять свое состояние, поэтому
2.5.2 Дифференциальные уравнения
Реальные объекты не могут мгновенно изменять свое состояние, поэтому
Слайд 24Дальше для линеаризации используется разложение функций в ряд Тейлора. Для некоторой функции
Дальше для линеаризации используется разложение функций в ряд Тейлора. Для некоторой функции
Слайд 262.6. Управление
Посмотрим на примере, как можно управлять объектом и что из
2.6. Управление
Посмотрим на примере, как можно управлять объектом и что из
Слайд 27 Построим математическую модель объекта, то есть цистерны. Поток на выходе показывает,
Построим математическую модель объекта, то есть цистерны. Поток на выходе показывает,
 Низкоуровневый анализ конструкций языка С++
Низкоуровневый анализ конструкций языка С++ Знакомство с интернетом. Цифровая грамотность (1 класс)
Знакомство с интернетом. Цифровая грамотность (1 класс) Опыт внедрения и развития интеллектуальной транспортной системы в тульской городской агломерации
Опыт внедрения и развития интеллектуальной транспортной системы в тульской городской агломерации Формирование изображения на экране монитора. Обработка графической информации
Формирование изображения на экране монитора. Обработка графической информации Компьютер и его компоненты
Компьютер и его компоненты prez_0
prez_0 Презентация на тему Устройство компьютера
Презентация на тему Устройство компьютера  Безопасность детей в Интернете
Безопасность детей в Интернете Презентация на тему Создание WEB–сайта с помощью языка HTML
Презентация на тему Создание WEB–сайта с помощью языка HTML  Презентация
Презентация Массовые дистанционные образовательные конкурсы для детей и педагогов
Массовые дистанционные образовательные конкурсы для детей и педагогов Численное моделирование параметров облачности для анализа их влияния на процессы переноса излучения в атмосфере
Численное моделирование параметров облачности для анализа их влияния на процессы переноса излучения в атмосфере Новая версия ЭБС Znanium. Сравнение старой и новой версий системы
Новая версия ЭБС Znanium. Сравнение старой и новой версий системы Новые технологии в Русском музее Санкт-Петербурга
Новые технологии в Русском музее Санкт-Петербурга Практика в студенческом медиацентре
Практика в студенческом медиацентре Техническое задание сайт Shkola Lab
Техническое задание сайт Shkola Lab Устройства компьютера
Устройства компьютера Типы алгоритмов
Типы алгоритмов Інформаційна технологія
Інформаційна технологія Реле управления, цифровые технологии и логические схемы
Реле управления, цифровые технологии и логические схемы Разновидности объектов и их классификация
Разновидности объектов и их классификация От истоков до наших дней. Objective C
От истоков до наших дней. Objective C Введение в теорию алгоритмов
Введение в теорию алгоритмов Анализ социальных групп. Занятие 2. Изучение структуры сообщества, авторов сообщений в социальной сети ВКонтакте
Анализ социальных групп. Занятие 2. Изучение структуры сообщества, авторов сообщений в социальной сети ВКонтакте Системы программирования и прикладное программное обеспечение
Системы программирования и прикладное программное обеспечение Работа в онлайн-сервисе. LearningApps.org
Работа в онлайн-сервисе. LearningApps.org Представление о веб-конструировании
Представление о веб-конструировании Продвинутый Python
Продвинутый Python