- Методы и алгоритмы трехмерной графики

Содержание
- 2. Содержание Работа с 3D изображением Аналитическая модель поверхности Векторная полигональная модель Задача удаления невидимых линий и
- 3. Для получения трёхмерного изображения на плоскости требуются следующие шаги: моделирование — создание трёхмерной математической модели сцены
- 8. Описание куба
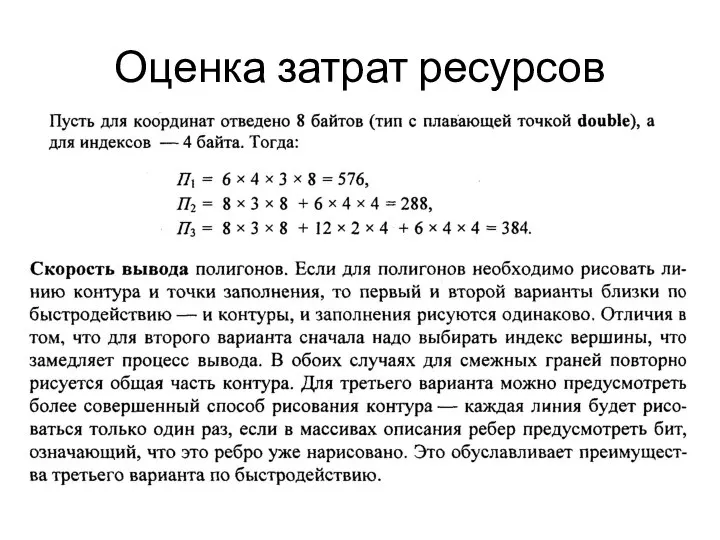
- 11. Оценка затрат ресурсов
- 14. Моделирование Схема проецирования сцены на экран компьютера Моделирование сцены (виртуального пространства моделирования) включает в себя несколько
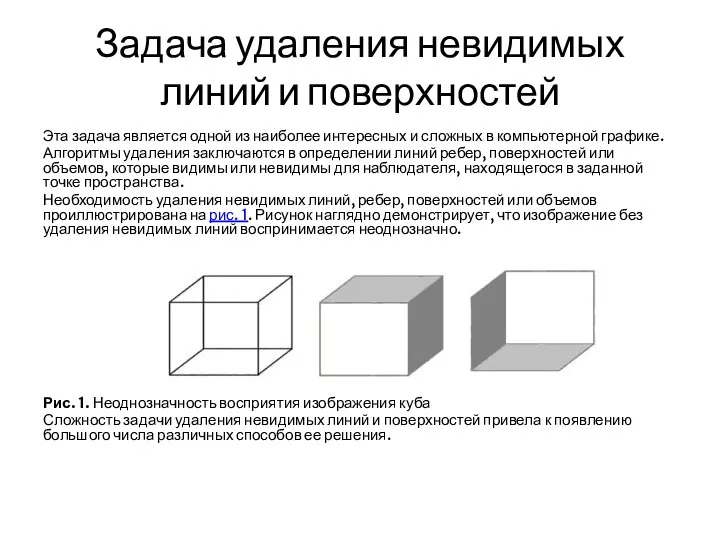
- 15. Задача удаления невидимых линий и поверхностей Эта задача является одной из наиболее интересных и сложных в
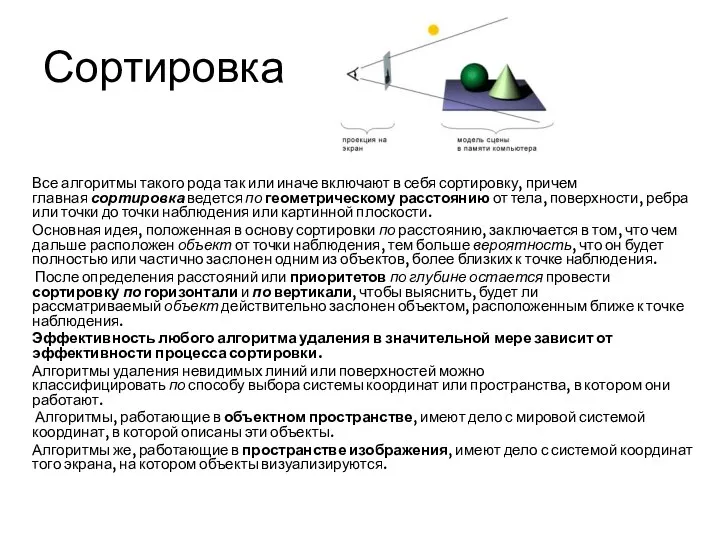
- 16. Сортировка Все алгоритмы такого рода так или иначе включают в себя сортировку, причем главная сортировка ведется
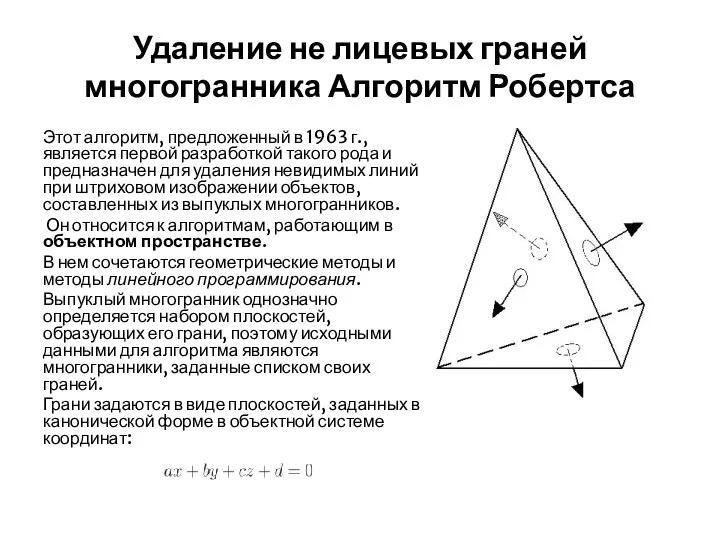
- 17. Удаление не лицевых граней многогранника Алгоритм Робертса Этот алгоритм, предложенный в 1963 г., является первой разработкой
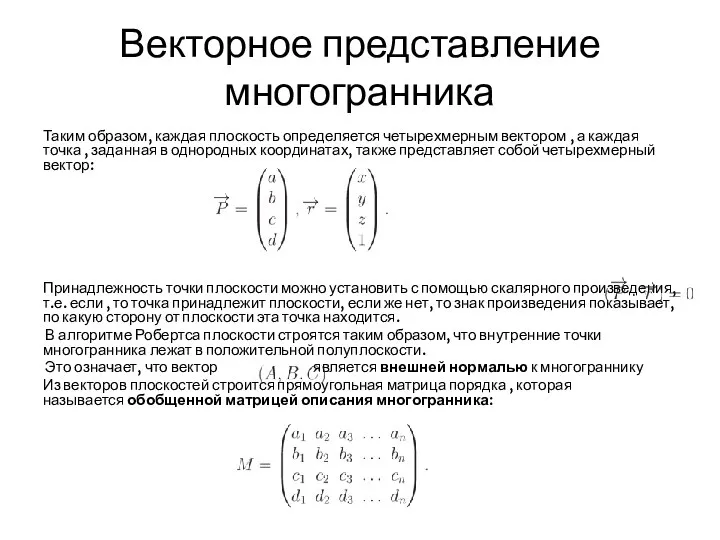
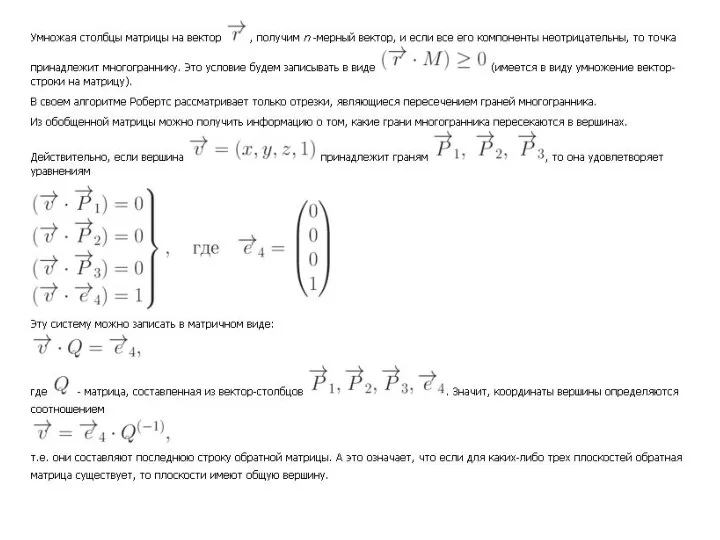
- 18. Векторное представление многогранника Таким образом, каждая плоскость определяется четырехмерным вектором , а каждая точка , заданная
- 20. Алгоритм Робертса Алгоритм прежде всего удаляет из каждого многогранника те ребра или грани, которые экранируются самим
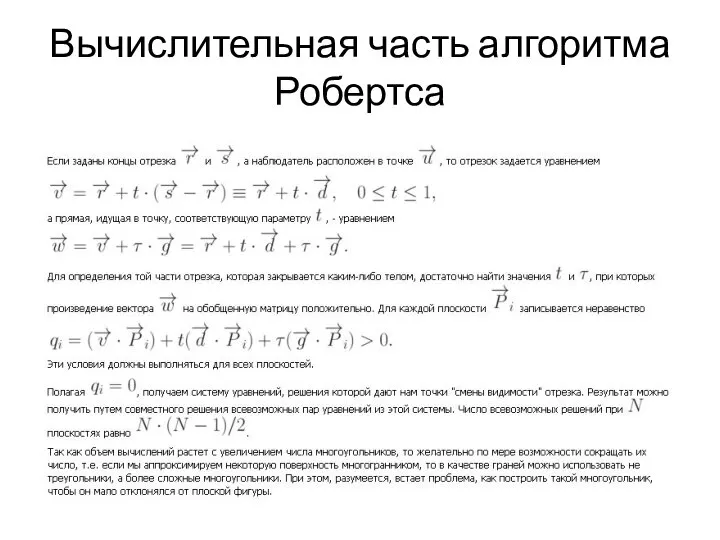
- 21. Вычислительная часть алгоритма Робертса
- 22. Алгоритм Варнока В отличие от алгоритма Робертса, Варнок в 1968 г. предложил алгоритм, работающий не в
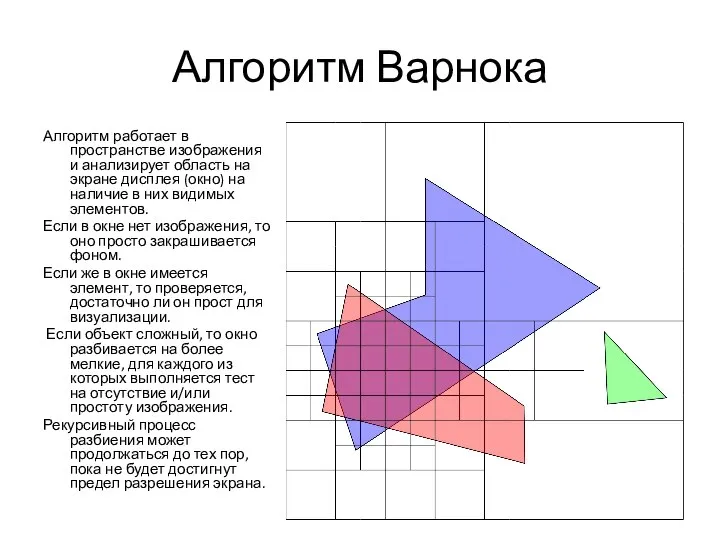
- 23. Алгоритм Варнока Алгоритм работает в пространстве изображения и анализирует область на экране дисплея (окно) на наличие
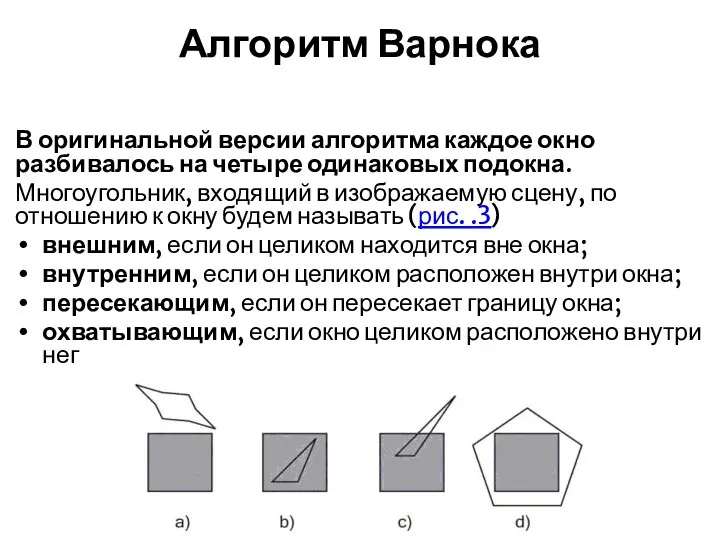
- 24. Алгоритм Варнока В оригинальной версии алгоритма каждое окно разбивалось на четыре одинаковых подокна. Многоугольник, входящий в
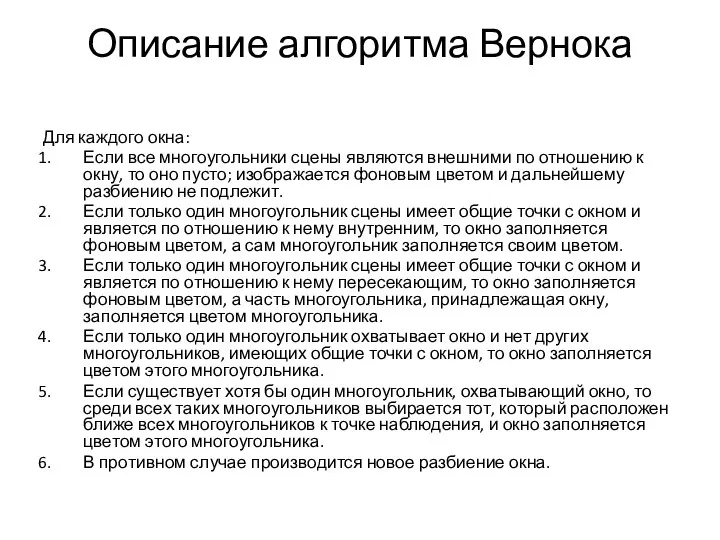
- 25. Описание алгоритма Вернока Для каждого окна: Если все многоугольники сцены являются внешними по отношению к окну,
- 26. Комментарий к алгоритму Вернока Шаги 1–4 рассматривают ситуацию пересечения окна только с одним многоугольником. Они используются
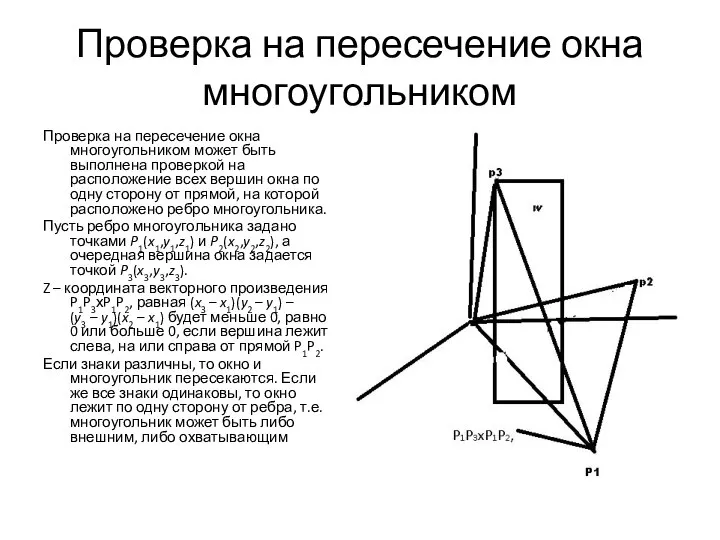
- 27. Проверка на пересечение окна многоугольником Проверка на пересечение окна многоугольником может быть выполнена проверкой на расположение
- 28. Сортировка многоугольников по глубине Следует заметить, что существуют различные реализации алгоритма Варнока. Были предложены варианты оптимизации,
- 29. Алгоритм Вейлера-Азертона Вейлер и Азертон попытались оптимизировать алгоритм Варнока в отношении числа выполняемых разбиений, перейдя от
- 30. Алгоритм Вейлера-Азертона В самом общем виде он состоит из четырех шагов. Предварительная сортировка по глубине. Отсечение
- 31. Алгоритм Вейлера-Азертона В процессе предварительной сортировки создается список приблизительных приоритетов, причем близость многоугольника к точке наблюдения
- 32. Алгоритм был обобщен Кэтмулом Этот алгоритм в дальнейшем был обобщен Кэтмулом (1974) для изображения гладких бикубических
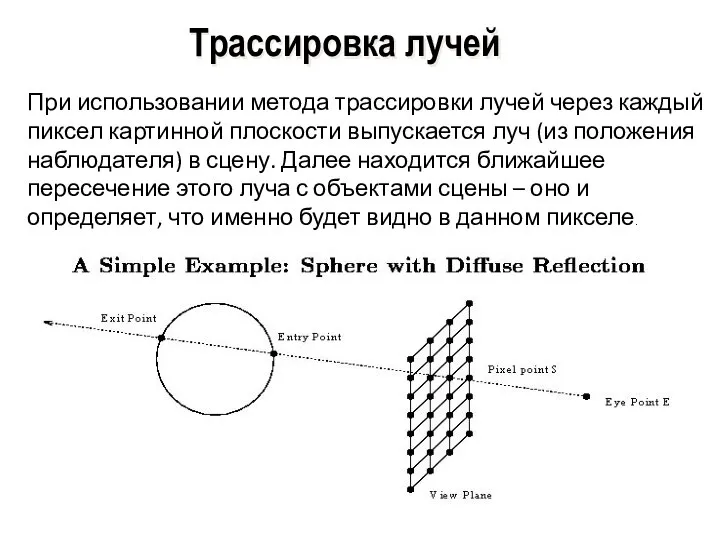
- 33. Трассировка лучей При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается луч (из положения
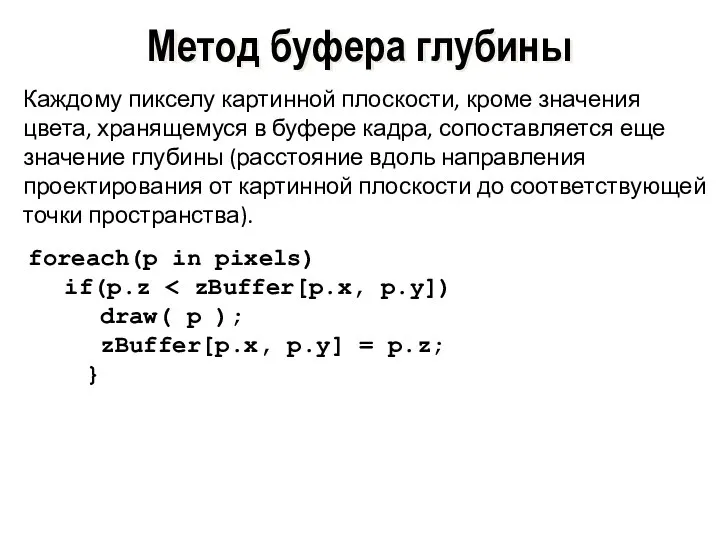
- 34. Метод буфера глубины Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере кадра, сопоставляется еще
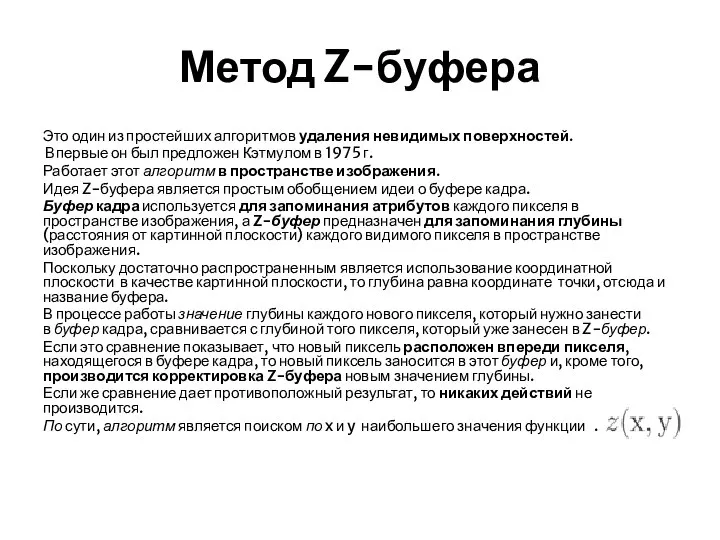
- 35. Метод Z-буфера Это один из простейших алгоритмов удаления невидимых поверхностей. Впервые он был предложен Кэтмулом в
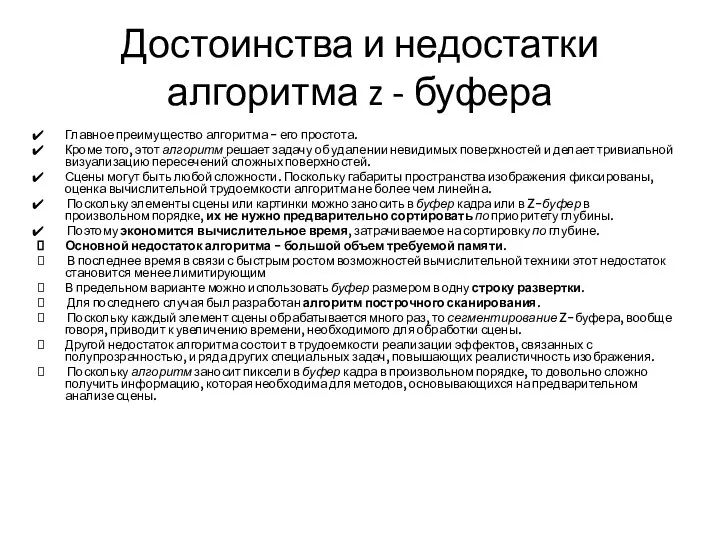
- 36. Достоинства и недостатки алгоритма z - буфера Главное преимущество алгоритма - его простота. Кроме того, этот
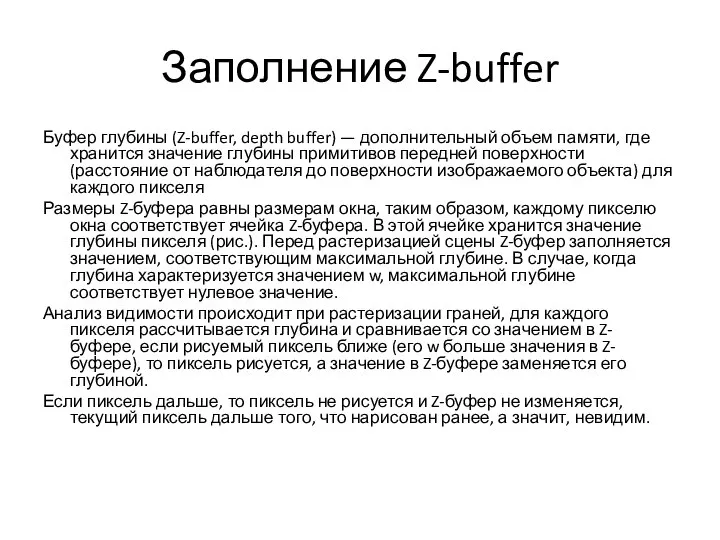
- 37. Заполнение Z-buffer Буфер глубины (Z-buffer, depth buffer) — дополнительный объем памяти, где хранится значение глубины примитивов
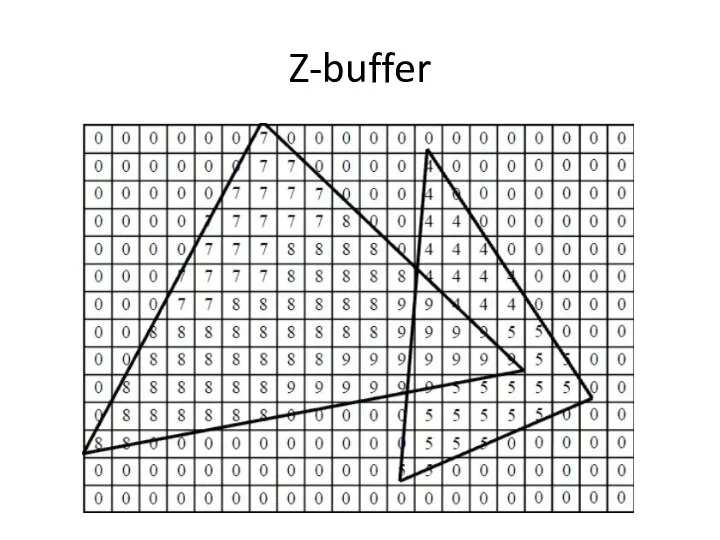
- 38. Z-buffer
- 39. Метод Z-буфера Алгоритм довольно просто реализуется как программно, так и аппаратно, прекрасно сочетается с конвейерной архитектурой
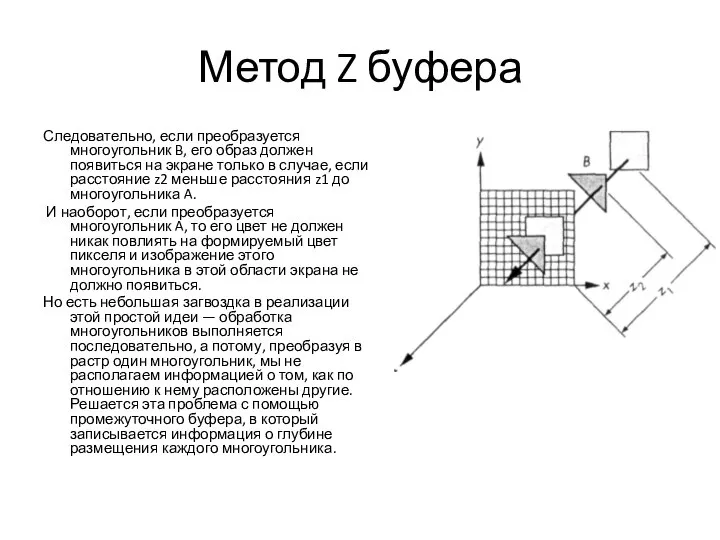
- 40. Метод Z буфера Следовательно, если преобразуется многоугольник B, его образ должен появиться на экране только в
- 41. Метод Z-буфера Предположим, что в нашем распоряжении имеется буфер — назовем его Zбуфером, который имеет такую
- 42. Метод Z-буфера Процесс заполнения Z-буфера выглядит в первом приближении следующим образом. Все многоугольники в описании сцены
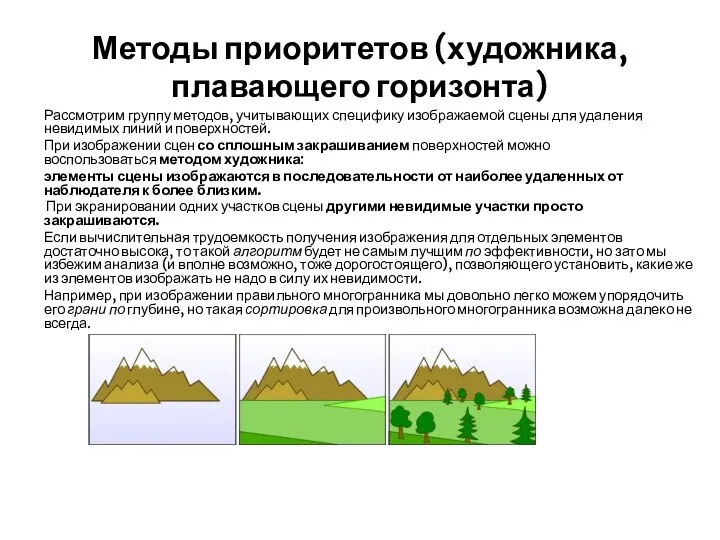
- 43. Методы приоритетов (художника, плавающего горизонта) Рассмотрим группу методов, учитывающих специфику изображаемой сцены для удаления невидимых линий
- 44. Алгоритм художника Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке их приближения к
- 45. Алгоритм художника: проблемы Не всегда грани возможно упорядочить Не всегда грани возможно сравнить по координате z
- 46. ё Упорядочивание граней Проведем через одну из граней плоскость и проверим, лежит ли другая грань целиком
- 47. Пять проверок в алгоритме художника 1. Накладываются ли x-габариты мн-ков? 2. Накладываются ли y-габариты мн-ков? 3.
- 48. Метод двоичного разбиения пространства (1/3) Пусть известно, что плоскость π разбивает все грани (объекты) сцены на
- 49. Метод двоичного разбиения пространства (2/3) A B C D C E1 E2 + - + -
- 50. Метод двоичного разбиения пространства (3/3) class BSPNode { Face *face; // Грань объекта BSPNode *positive; BSPNode
- 51. Изображение поверхности, заданной в виде однозначной функции двух переменных
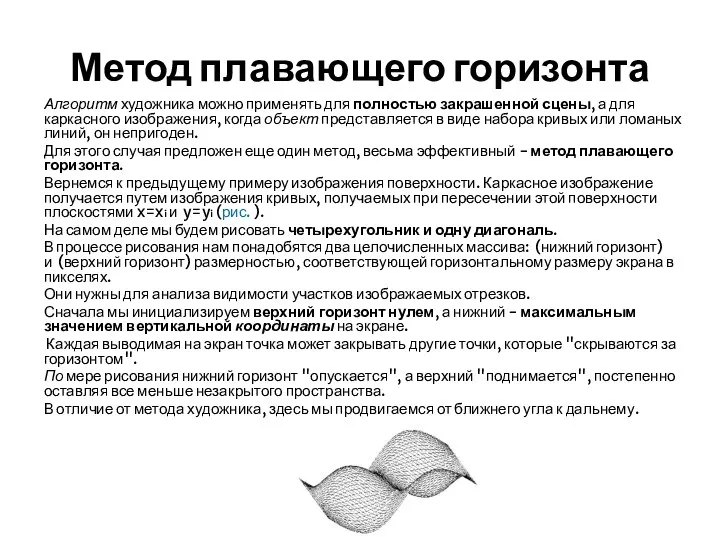
- 52. Метод плавающего горизонта Алгоритм художника можно применять для полностью закрашенной сцены, а для каркасного изображения, когда
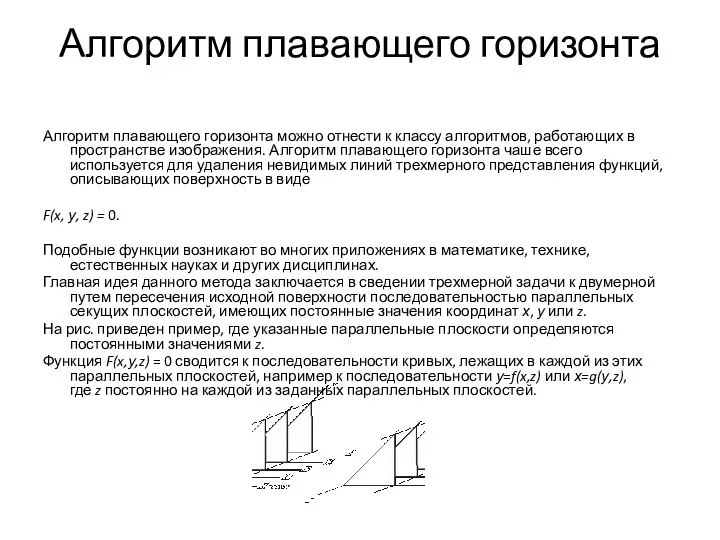
- 53. Алгоритм плавающего горизонта Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих в пространстве изображения. Алгоритм
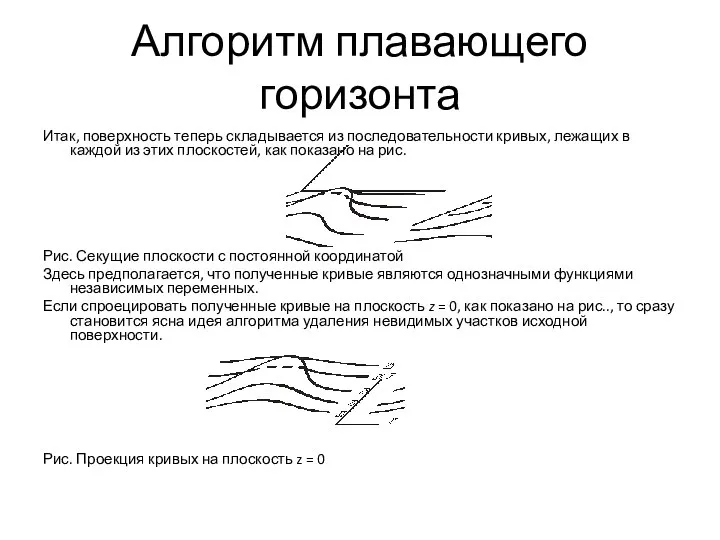
- 54. Алгоритм плавающего горизонта Итак, поверхность теперь складывается из последовательности кривых, лежащих в каждой из этих плоскостей,
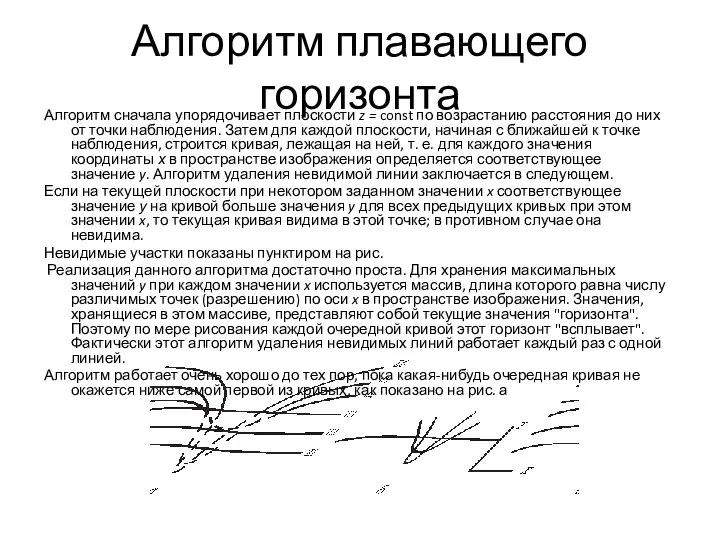
- 55. Алгоритм плавающего горизонта Алгоритм сначала упорядочивает плоскости z = const по возрастанию расстояния до них от
- 56. Алгоритм плавающего горизонта Подобные кривые, естественно, видимы и представляют собой нижнюю сторону исходной поверхности, однако алгоритм
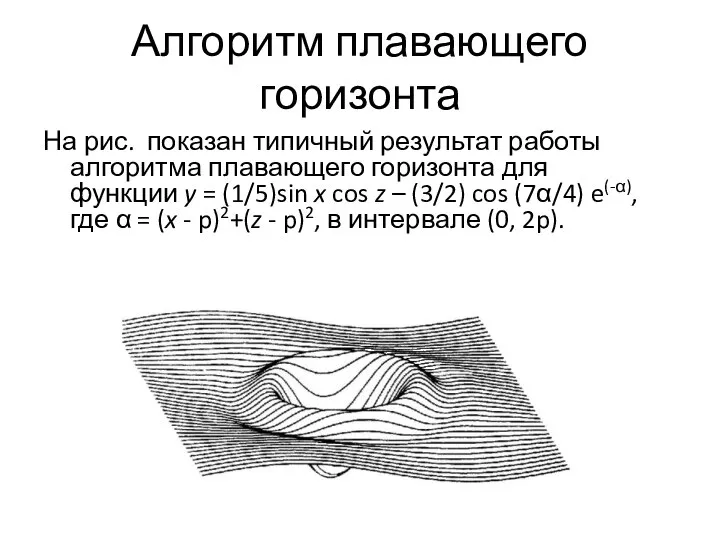
- 57. Алгоритм плавающего горизонта На рис. показан типичный результат работы алгоритма плавающего горизонта для функции y =
- 58. Алгоритмы построчного сканирования для криволинейных поверхностей Идея построчного сканирования, предложенная в 1967 г. Уайли, Ромни, Эвансом
- 60. Скачать презентацию
Слайд 2Содержание
Работа с 3D изображением
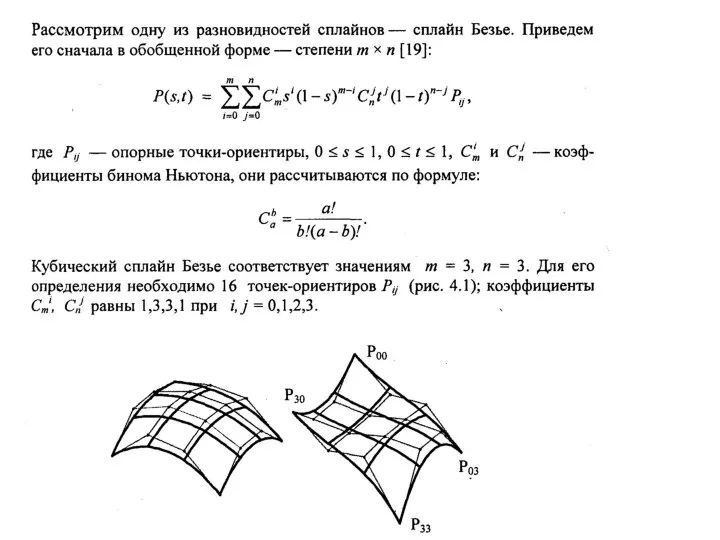
Аналитическая модель поверхности
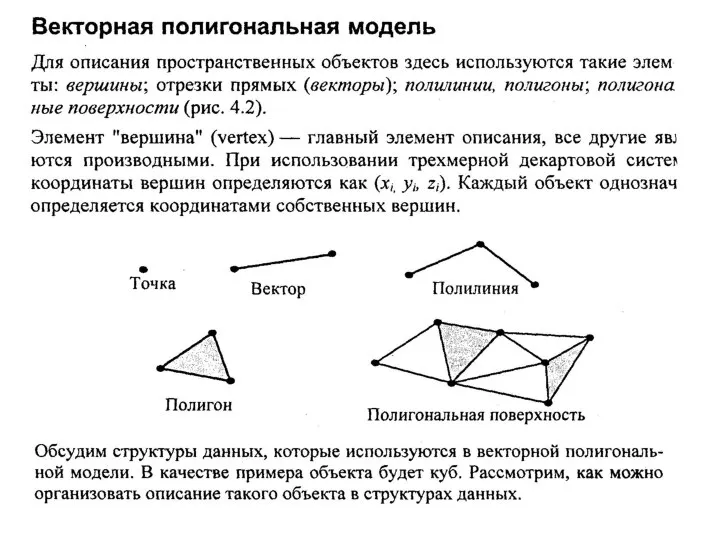
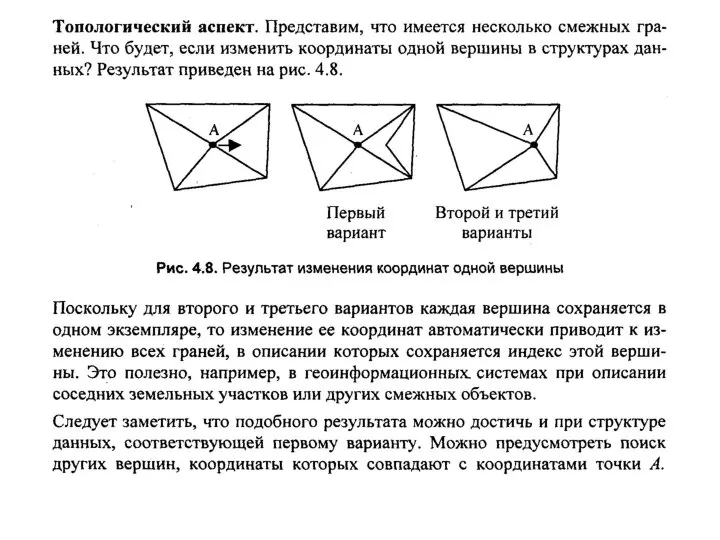
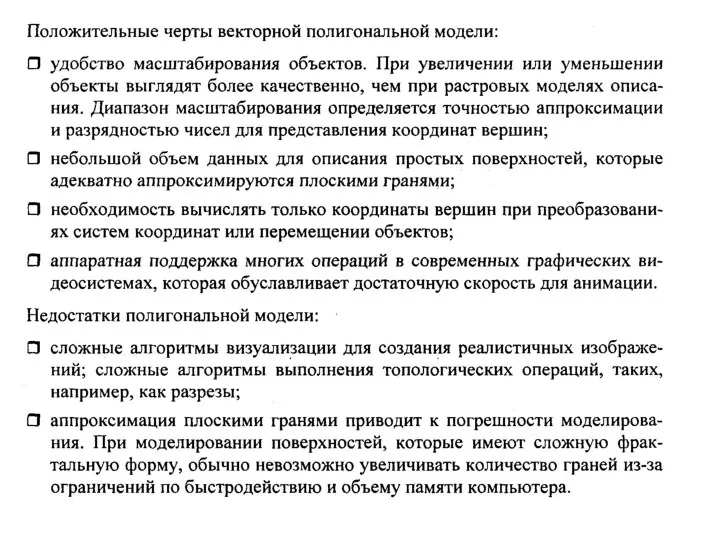
Векторная полигональная модель
Задача удаления невидимых линий и
Содержание
Работа с 3D изображением
Аналитическая модель поверхности
Векторная полигональная модель
Задача удаления невидимых линий и
Слайд 3Для получения трёхмерного изображения на плоскости требуются следующие шаги:
моделирование — создание трёхмерной математической модели сцены
Для получения трёхмерного изображения на плоскости требуются следующие шаги:
моделирование — создание трёхмерной математической модели сцены
Слайд 8Описание куба
Описание куба

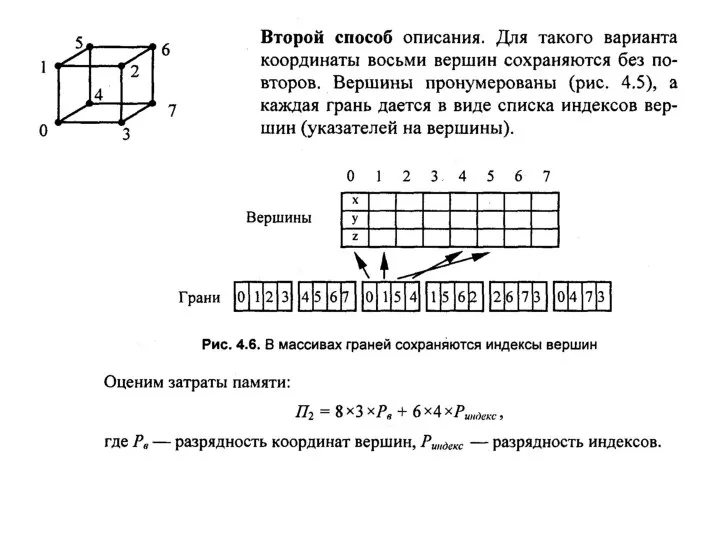
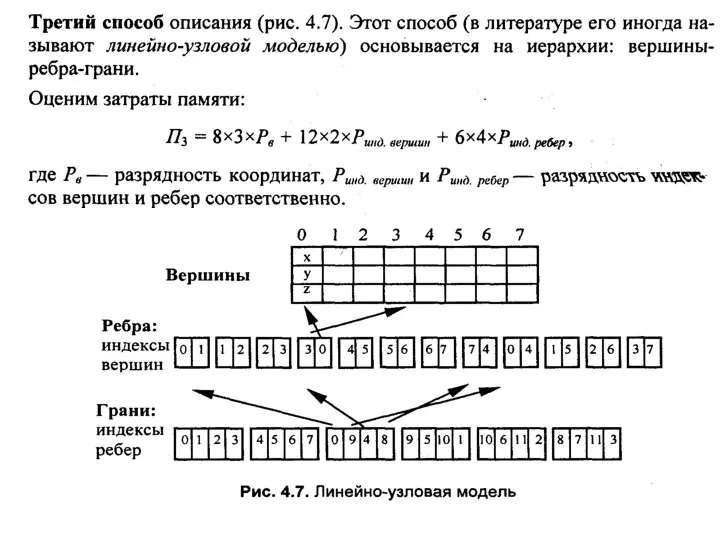
Слайд 11Оценка затрат ресурсов
Оценка затрат ресурсов
Слайд 14Моделирование
Схема проецирования сцены на экран компьютера
Моделирование сцены (виртуального пространства моделирования) включает в себя
Моделирование
Схема проецирования сцены на экран компьютера
Моделирование сцены (виртуального пространства моделирования) включает в себя
Слайд 15Задача удаления невидимых линий и поверхностей
Эта задача является одной из наиболее интересных
Задача удаления невидимых линий и поверхностей
Эта задача является одной из наиболее интересных
Слайд 16Сортировка
Все алгоритмы такого рода так или иначе включают в себя сортировку, причем
Сортировка
Все алгоритмы такого рода так или иначе включают в себя сортировку, причем
Слайд 17Удаление не лицевых граней многогранника Алгоритм Робертса
Этот алгоритм, предложенный в 1963 г.,
Удаление не лицевых граней многогранника Алгоритм Робертса
Этот алгоритм, предложенный в 1963 г.,
Слайд 18Векторное представление многогранника
Таким образом, каждая плоскость определяется четырехмерным вектором , а каждая точка ,
Векторное представление многогранника
Таким образом, каждая плоскость определяется четырехмерным вектором , а каждая точка ,
Слайд 20Алгоритм Робертса
Алгоритм прежде всего удаляет из каждого многогранника те ребра или грани,
Алгоритм Робертса
Алгоритм прежде всего удаляет из каждого многогранника те ребра или грани,
Слайд 21Вычислительная часть алгоритма Робертса
Вычислительная часть алгоритма Робертса
Слайд 22Алгоритм Варнока
В отличие от алгоритма Робертса, Варнок в 1968 г. предложил алгоритм,
Алгоритм Варнока
В отличие от алгоритма Робертса, Варнок в 1968 г. предложил алгоритм,
Слайд 23Алгоритм Варнока
Алгоритм работает в пространстве изображения и анализирует область на экране дисплея
Алгоритм Варнока
Алгоритм работает в пространстве изображения и анализирует область на экране дисплея
Слайд 24Алгоритм Варнока
В оригинальной версии алгоритма каждое окно разбивалось на четыре одинаковых подокна.
Алгоритм Варнока
В оригинальной версии алгоритма каждое окно разбивалось на четыре одинаковых подокна.
Слайд 25Описание алгоритма Вернока
Для каждого окна:
Если все многоугольники сцены являются внешними по отношению
Описание алгоритма Вернока
Для каждого окна:
Если все многоугольники сцены являются внешними по отношению
Слайд 26Комментарий к алгоритму Вернока
Шаги 1–4 рассматривают ситуацию пересечения окна только с одним
Комментарий к алгоритму Вернока
Шаги 1–4 рассматривают ситуацию пересечения окна только с одним
Слайд 27Проверка на пересечение окна многоугольником
Проверка на пересечение окна многоугольником может быть выполнена
Проверка на пересечение окна многоугольником
Проверка на пересечение окна многоугольником может быть выполнена
Слайд 28Сортировка многоугольников по глубине
Следует заметить, что существуют различные реализации алгоритма Варнока.
Были
Сортировка многоугольников по глубине
Следует заметить, что существуют различные реализации алгоритма Варнока.
Были
Слайд 29Алгоритм Вейлера-Азертона
Вейлер и Азертон попытались оптимизировать алгоритм Варнока в отношении числа выполняемых
Алгоритм Вейлера-Азертона
Вейлер и Азертон попытались оптимизировать алгоритм Варнока в отношении числа выполняемых
Слайд 30Алгоритм Вейлера-Азертона
В самом общем виде он состоит из четырех шагов.
Предварительная сортировка по
Алгоритм Вейлера-Азертона
В самом общем виде он состоит из четырех шагов.
Предварительная сортировка по
Слайд 31Алгоритм Вейлера-Азертона
В процессе предварительной сортировки создается список приблизительных приоритетов, причем близость многоугольника
Алгоритм Вейлера-Азертона
В процессе предварительной сортировки создается список приблизительных приоритетов, причем близость многоугольника
Слайд 32Алгоритм был обобщен Кэтмулом
Этот алгоритм в дальнейшем был обобщен Кэтмулом (1974) для
Алгоритм был обобщен Кэтмулом
Этот алгоритм в дальнейшем был обобщен Кэтмулом (1974) для
Слайд 33Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается
Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается
Слайд 34Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере
Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере
Слайд 35Метод Z-буфера
Это один из простейших алгоритмов удаления невидимых поверхностей.
Впервые он был
Метод Z-буфера
Это один из простейших алгоритмов удаления невидимых поверхностей.
Впервые он был
Слайд 36Достоинства и недостатки алгоритма z - буфера
Главное преимущество алгоритма - его простота.
Достоинства и недостатки алгоритма z - буфера
Главное преимущество алгоритма - его простота.
Слайд 37Заполнение Z-buffer
Буфер глубины (Z-buffer, depth buffer) — дополнительный объем памяти, где хранится
Заполнение Z-buffer
Буфер глубины (Z-buffer, depth buffer) — дополнительный объем памяти, где хранится
Слайд 38Z-buffer
Z-buffer
Слайд 39Метод Z-буфера
Алгоритм довольно просто реализуется как программно, так и аппаратно, прекрасно сочетается
Метод Z-буфера
Алгоритм довольно просто реализуется как программно, так и аппаратно, прекрасно сочетается
Слайд 40Метод Z буфера
Следовательно, если преобразуется многоугольник B, его образ должен появиться на
Метод Z буфера
Следовательно, если преобразуется многоугольник B, его образ должен появиться на
Слайд 41Метод Z-буфера
Предположим, что в нашем распоряжении имеется буфер — назовем его Zбуфером,
Метод Z-буфера
Предположим, что в нашем распоряжении имеется буфер — назовем его Zбуфером,

Слайд 42Метод Z-буфера
Процесс заполнения Z-буфера выглядит в первом приближении следующим образом. Все многоугольники
Метод Z-буфера
Процесс заполнения Z-буфера выглядит в первом приближении следующим образом. Все многоугольники
Слайд 43Методы приоритетов (художника, плавающего горизонта)
Рассмотрим группу методов, учитывающих специфику изображаемой сцены для
Методы приоритетов (художника, плавающего горизонта)
Рассмотрим группу методов, учитывающих специфику изображаемой сцены для
Слайд 44Алгоритм художника
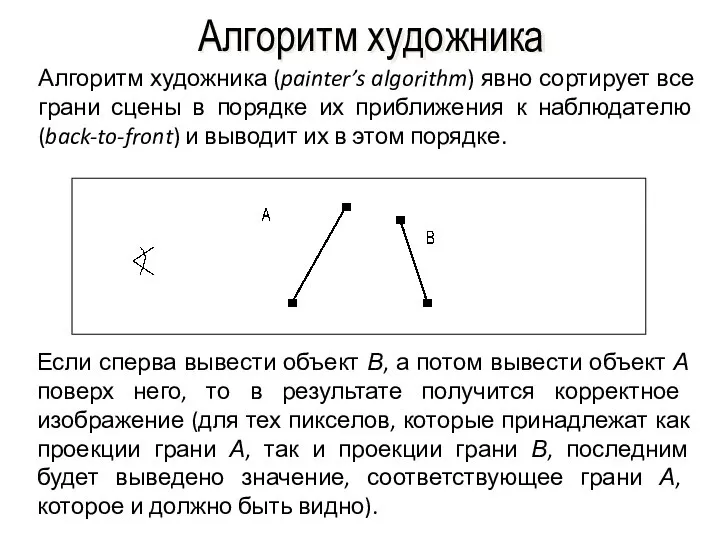
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке
Алгоритм художника
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке
Слайд 45Алгоритм художника: проблемы
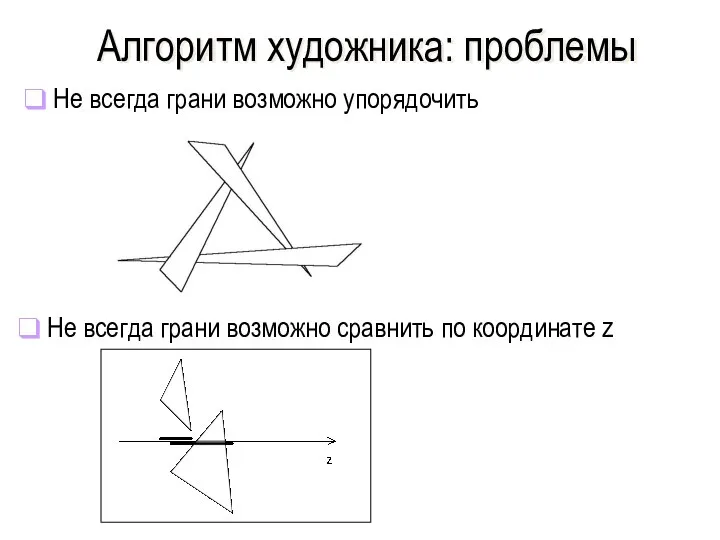
Не всегда грани возможно упорядочить
Не всегда грани возможно
Алгоритм художника: проблемы
Не всегда грани возможно упорядочить
Не всегда грани возможно
Слайд 46ё
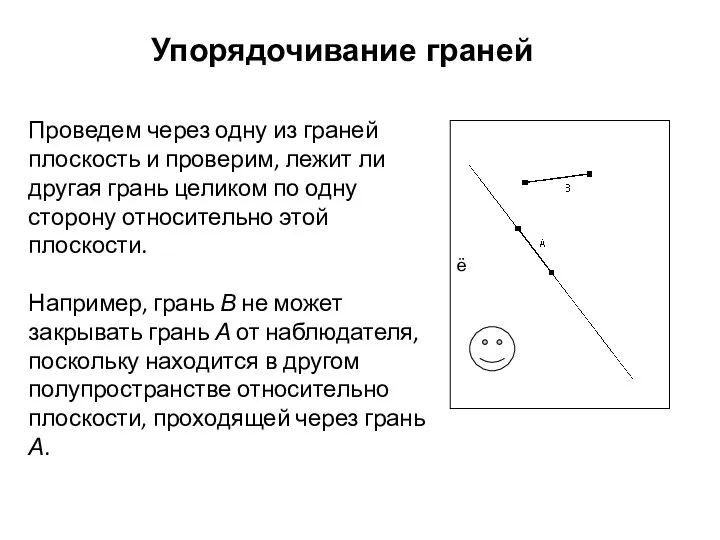
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли другая
ё
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли другая
Слайд 47Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли y-габариты
Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли y-габариты
Слайд 48Метод двоичного разбиения пространства (1/3)
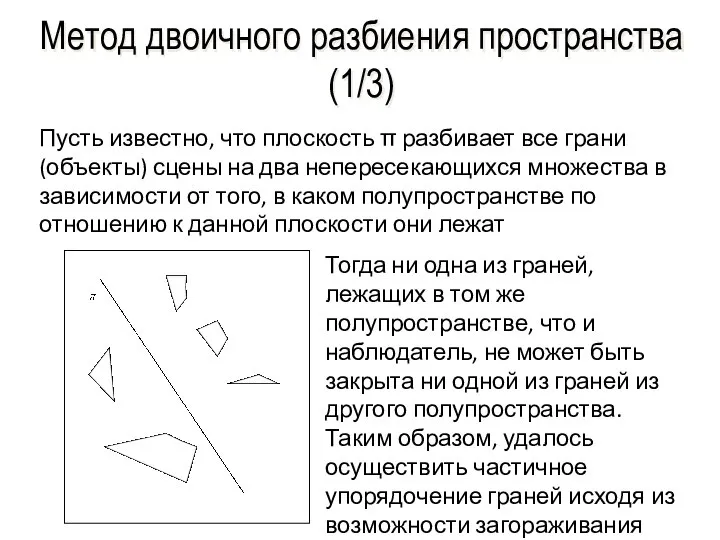
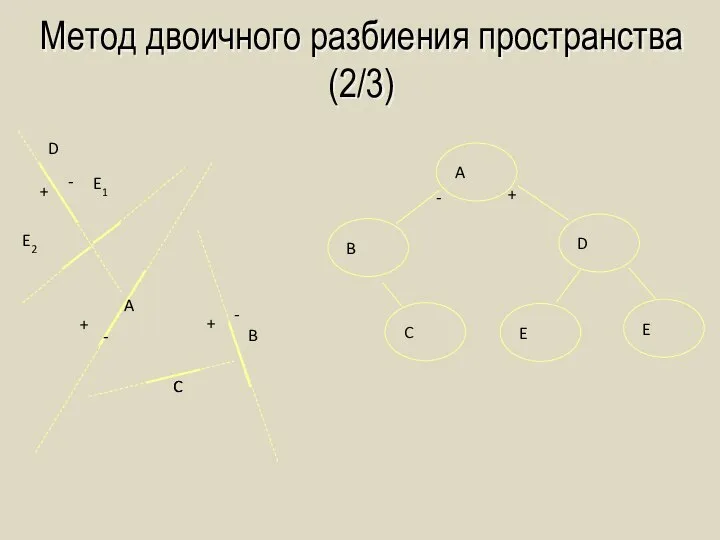
Пусть известно, что плоскость π разбивает все грани
Метод двоичного разбиения пространства (1/3)
Пусть известно, что плоскость π разбивает все грани
Слайд 49Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
Слайд 50Метод двоичного разбиения пространства (3/3)
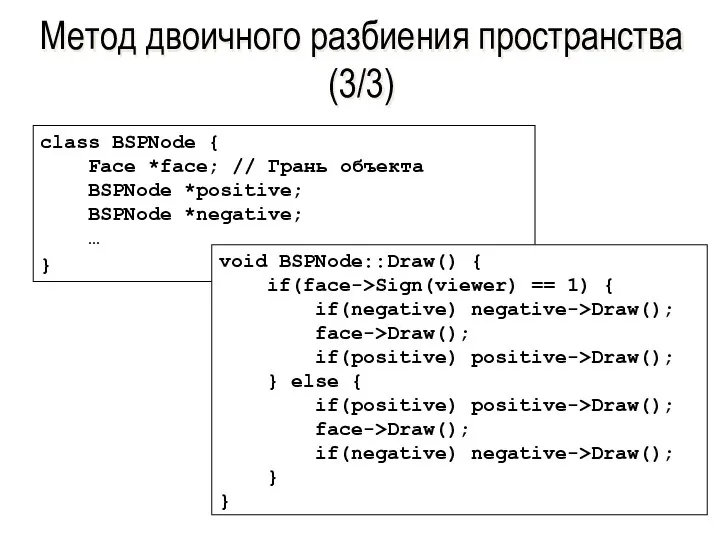
class BSPNode {
Face *face; // Грань объекта
Метод двоичного разбиения пространства (3/3)
class BSPNode {
Face *face; // Грань объекта
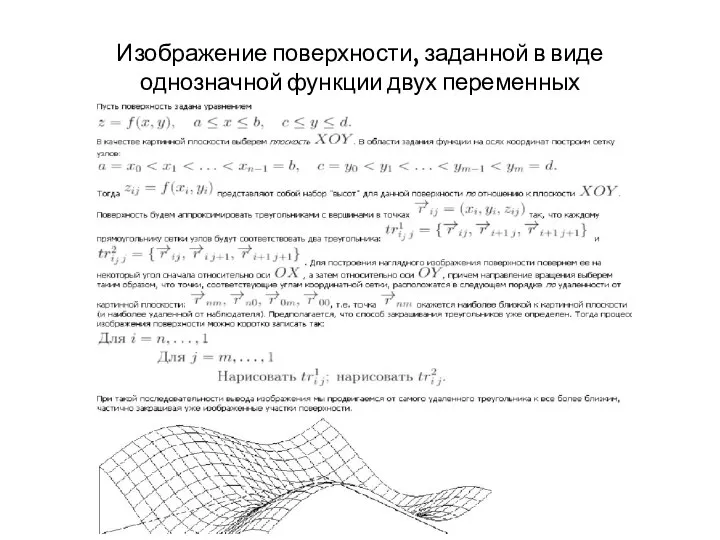
Слайд 51Изображение поверхности, заданной в виде однозначной функции двух переменных
Изображение поверхности, заданной в виде однозначной функции двух переменных
Слайд 52Метод плавающего горизонта
Алгоритм художника можно применять для полностью закрашенной сцены, а для каркасного
Метод плавающего горизонта
Алгоритм художника можно применять для полностью закрашенной сцены, а для каркасного
Слайд 53Алгоритм плавающего горизонта
Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих в
Алгоритм плавающего горизонта
Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих в
Слайд 54Алгоритм плавающего горизонта
Итак, поверхность теперь складывается из последовательности кривых, лежащих в каждой
Алгоритм плавающего горизонта
Итак, поверхность теперь складывается из последовательности кривых, лежащих в каждой
Слайд 55Алгоритм плавающего горизонта
Алгоритм сначала упорядочивает плоскости z = const по возрастанию расстояния до них
Алгоритм плавающего горизонта
Алгоритм сначала упорядочивает плоскости z = const по возрастанию расстояния до них
Слайд 56Алгоритм плавающего горизонта
Подобные кривые, естественно, видимы и представляют собой нижнюю сторону исходной
Алгоритм плавающего горизонта
Подобные кривые, естественно, видимы и представляют собой нижнюю сторону исходной
Слайд 57Алгоритм плавающего горизонта
На рис. показан типичный результат работы алгоритма плавающего горизонта для
Алгоритм плавающего горизонта
На рис. показан типичный результат работы алгоритма плавающего горизонта для
Слайд 58Алгоритмы построчного сканирования для криволинейных поверхностей
Идея построчного сканирования, предложенная в 1967 г. Уайли,
Алгоритмы построчного сканирования для криволинейных поверхностей
Идея построчного сканирования, предложенная в 1967 г. Уайли,
 Переменка. Разработка программного продукта в среде Delphi 7
Переменка. Разработка программного продукта в среде Delphi 7 Управление компьютером
Управление компьютером Обращение. Урок в 7 классе
Обращение. Урок в 7 классе Инновационные технологии в управлении персоналом инновационное устройство UOR-56
Инновационные технологии в управлении персоналом инновационное устройство UOR-56 Основы системологии. Системный анализ
Основы системологии. Системный анализ Условный оператор
Условный оператор Бизнес план интернет магазина Leki-shop
Бизнес план интернет магазина Leki-shop Презентация на тему Магистрально-модульный принцип построения компьютера
Презентация на тему Магистрально-модульный принцип построения компьютера  Основы веб-технологий
Основы веб-технологий Информационные технологии в образовании
Информационные технологии в образовании Цифровой сервис для поддержки пациента после операции эндопротезирования
Цифровой сервис для поддержки пациента после операции эндопротезирования Презентация на тему Программная оболочка Norton Commander
Презентация на тему Программная оболочка Norton Commander  Средневековая криптография
Средневековая криптография Системы счисления. Правила сложения двоичных чисел. (часть 3)
Системы счисления. Правила сложения двоичных чисел. (часть 3) Полит-SMM. Продвижение политических проектов в соцсетях
Полит-SMM. Продвижение политических проектов в соцсетях MS Excel (Электронные таблицы). Тема 6
MS Excel (Электронные таблицы). Тема 6 Системы счисления. Позиционная система счисления
Системы счисления. Позиционная система счисления Поиск названия интернет-проекта. Квест-игра
Поиск названия интернет-проекта. Квест-игра Работа с Google диском
Работа с Google диском Антиплагиат. Алгоритм проверки на плагиат
Антиплагиат. Алгоритм проверки на плагиат Правило Если – то. Схема рассуждений
Правило Если – то. Схема рассуждений Геймдизайн-документация. На пути к идеальной структуре
Геймдизайн-документация. На пути к идеальной структуре Коммерческое предложение для компании
Коммерческое предложение для компании Программный модуль для регулирования Пуассоновских потоков в информационных системах
Программный модуль для регулирования Пуассоновских потоков в информационных системах Front-end skillup
Front-end skillup Носители информации
Носители информации Системный блок
Системный блок Общие сведения о персональном компьютере
Общие сведения о персональном компьютере