- Поиск оптимальных упаковок кругов при помощи алгоритмов оптимизации пакета PyTorch

Содержание
- 2. Введение Курсовая работа посвящена применению современных методов оптимизации, в частности стохастического градиентного спуска, к задаче поиска
- 3. Фреймворк PyTorch PyTorch — современная библиотека глубокого обучения, разработанная и развивающаяся компанией Facebook. Его разработка началась
- 4. Постановка задачи Задачи упаковки — это класс задач оптимизации в математике, в которых пытаются упаковать объекты
- 5. Градиентный спуск Градиентный спуск — это эвристический алгоритм, который выбирает случайную точку, рассчитывает направление скорейшего убывания/возрастания
- 6. Скорость обучения Размер шага алгоритма определяет, насколько мы собираемся двигать точку на графике функции потерь, и
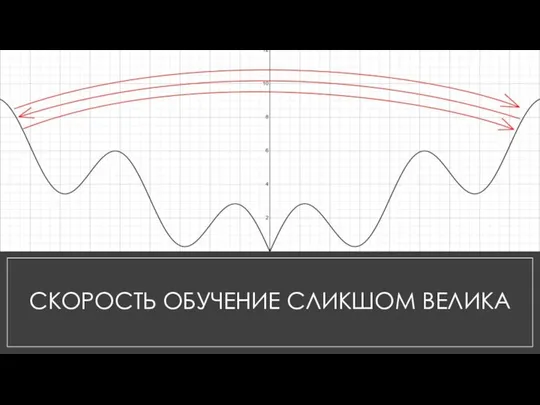
- 7. СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ ВЕЛИКА
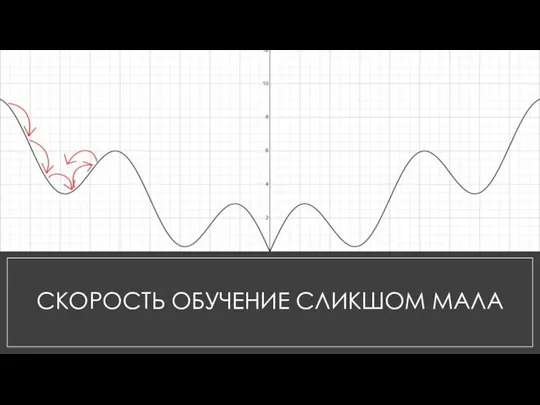
- 8. СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ МАЛА
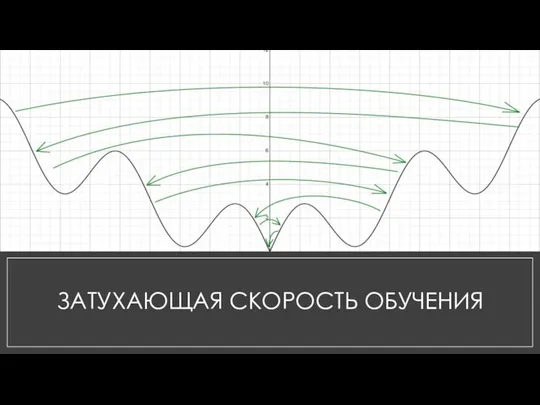
- 9. Затухающая скорость обучения Программа начинает работать с большой скоростью обучения, когда разность между старой точкой и
- 10. ЗАТУХАЮЩАЯ СКОРОСТЬ ОБУЧЕНИЯ
- 11. Значение patience При затухающей скорости обучения важно знать, в какой момент нужно уменьшить скорость. Для этого
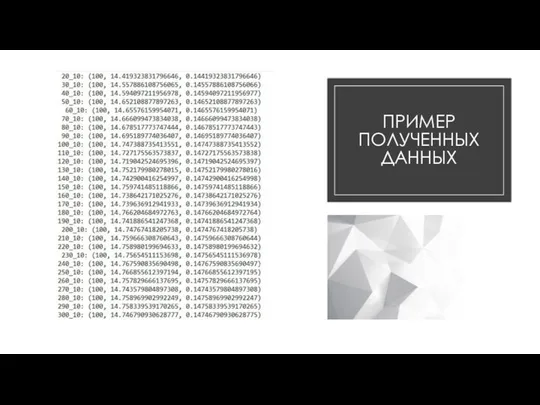
- 12. ПРИМЕР ПОЛУЧЕННЫХ ДАННЫХ
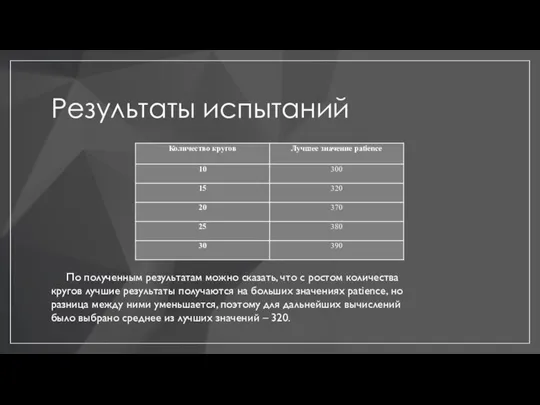
- 13. Результаты испытаний По полученным результатам можно сказать, что с ростом количества кругов лучшие результаты получаются на
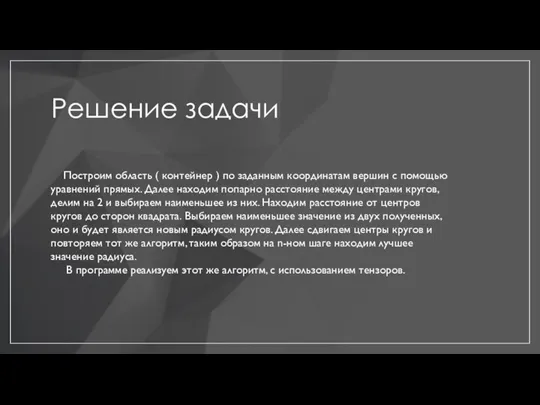
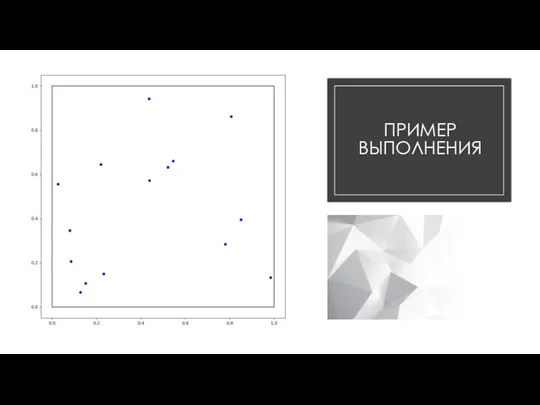
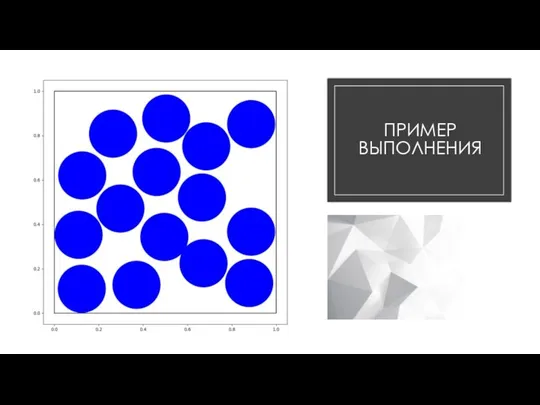
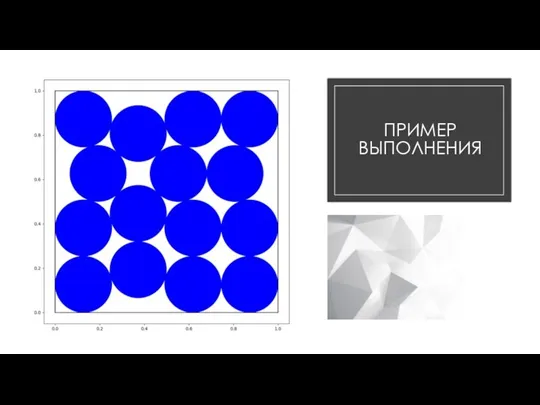
- 14. Решение задачи Построим область ( контейнер ) по заданным координатам вершин с помощью уравнений прямых. Далее
- 15. ПРИМЕР ВЫПОЛНЕНИЯ
- 16. ПРИМЕР ВЫПОЛНЕНИЯ
- 17. ПРИМЕР ВЫПОЛНЕНИЯ
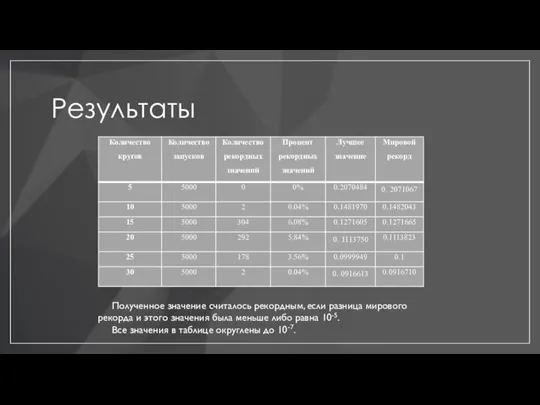
- 18. Результаты Полученное значение считалось рекордным, если разница мирового рекорда и этого значения была меньше либо равна
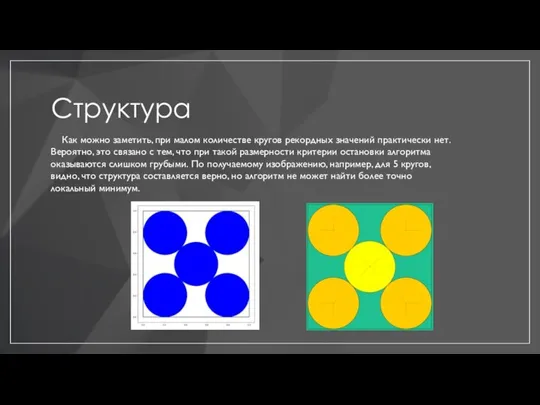
- 19. Структура Как можно заметить, при малом количестве кругов рекордных значений практически нет. Вероятно, это связано с
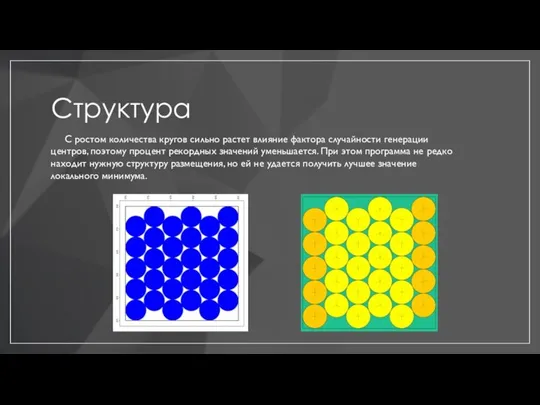
- 20. Структура С ростом количества кругов сильно растет влияние фактора случайности генерации центров, поэтому процент рекордных значений
- 21. Заключение Как показали исследования, при выбранных параметрах алгоритма и критериях сравнения с рекордом количество рекордных значений
- 23. Скачать презентацию
Слайд 2Введение
Курсовая работа посвящена применению современных методов оптимизации, в частности стохастического градиентного
Введение
Курсовая работа посвящена применению современных методов оптимизации, в частности стохастического градиентного
Слайд 3Фреймворк PyTorch
PyTorch — современная библиотека глубокого обучения, разработанная и развивающаяся компанией
Фреймворк PyTorch
PyTorch — современная библиотека глубокого обучения, разработанная и развивающаяся компанией
Слайд 4Постановка задачи
Задачи упаковки — это класс задач оптимизации в математике, в которых пытаются
Постановка задачи
Задачи упаковки — это класс задач оптимизации в математике, в которых пытаются
Слайд 5Градиентный спуск
Градиентный спуск — это эвристический алгоритм, который выбирает случайную точку, рассчитывает
Градиентный спуск
Градиентный спуск — это эвристический алгоритм, который выбирает случайную точку, рассчитывает
Слайд 6Скорость обучения
Размер шага алгоритма определяет, насколько мы собираемся двигать точку на
Скорость обучения
Размер шага алгоритма определяет, насколько мы собираемся двигать точку на
Слайд 7СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ ВЕЛИКА
СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ ВЕЛИКА
Слайд 8СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ МАЛА
СКОРОСТЬ ОБУЧЕНИЕ СЛИКШОМ МАЛА
Слайд 9Затухающая скорость обучения
Программа начинает работать с большой скоростью обучения, когда разность
Затухающая скорость обучения
Программа начинает работать с большой скоростью обучения, когда разность
Слайд 10ЗАТУХАЮЩАЯ СКОРОСТЬ ОБУЧЕНИЯ
ЗАТУХАЮЩАЯ СКОРОСТЬ ОБУЧЕНИЯ
Слайд 11Значение patience
При затухающей скорости обучения важно знать, в какой момент нужно
Значение patience
При затухающей скорости обучения важно знать, в какой момент нужно
Слайд 12ПРИМЕР ПОЛУЧЕННЫХ ДАННЫХ
ПРИМЕР ПОЛУЧЕННЫХ ДАННЫХ
Слайд 13Результаты испытаний
По полученным результатам можно сказать, что с ростом количества
Результаты испытаний
По полученным результатам можно сказать, что с ростом количества
Слайд 14Решение задачи
Построим область ( контейнер ) по заданным координатам вершин
Решение задачи
Построим область ( контейнер ) по заданным координатам вершин
Слайд 15ПРИМЕР ВЫПОЛНЕНИЯ
ПРИМЕР ВЫПОЛНЕНИЯ
Слайд 16ПРИМЕР ВЫПОЛНЕНИЯ
ПРИМЕР ВЫПОЛНЕНИЯ
Слайд 17ПРИМЕР ВЫПОЛНЕНИЯ
ПРИМЕР ВЫПОЛНЕНИЯ
Слайд 18Результаты
Полученное значение считалось рекордным, если разница мирового рекорда и этого
Результаты
Полученное значение считалось рекордным, если разница мирового рекорда и этого
Слайд 19Структура
Как можно заметить, при малом количестве кругов рекордных значений практически
Структура
Как можно заметить, при малом количестве кругов рекордных значений практически
Слайд 20Структура
С ростом количества кругов сильно растет влияние фактора случайности генерации
Структура
С ростом количества кругов сильно растет влияние фактора случайности генерации
Слайд 21Заключение
Как показали исследования, при выбранных параметрах алгоритма и критериях сравнения с
Заключение
Как показали исследования, при выбранных параметрах алгоритма и критериях сравнения с
 Презентация — это не слайды!
Презентация — это не слайды! Депеши Шнюка
Депеши Шнюка Архитектура современных операционных систем. Тема 4
Архитектура современных операционных систем. Тема 4 Обобщенная методика анализа и синтеза сложной системы
Обобщенная методика анализа и синтеза сложной системы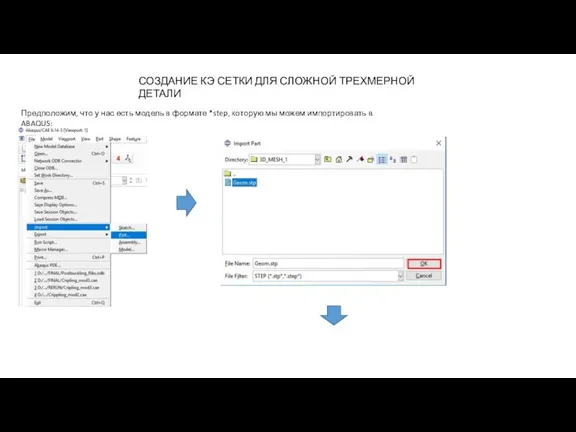 Создание КЭ сетки для сложной трехмерной детали
Создание КЭ сетки для сложной трехмерной детали Компьютерная графика. Начало работы
Компьютерная графика. Начало работы Этапы развития информационных ресурсов
Этапы развития информационных ресурсов Testing
Testing План зсо
План зсо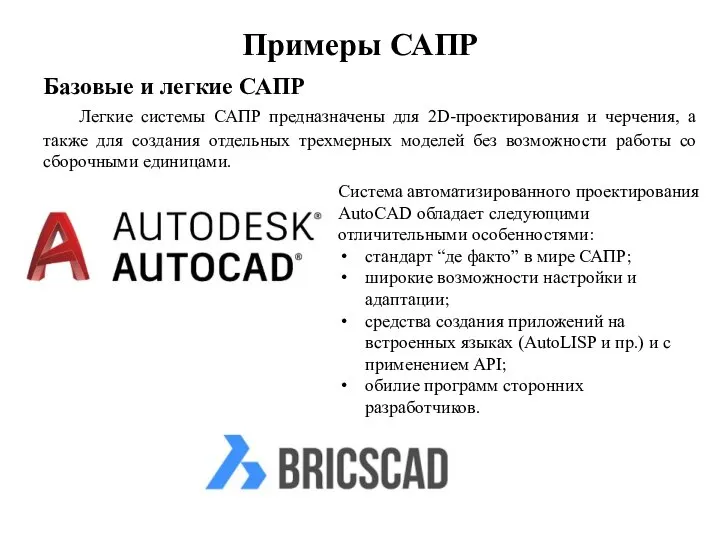 Примеры САПР
Примеры САПР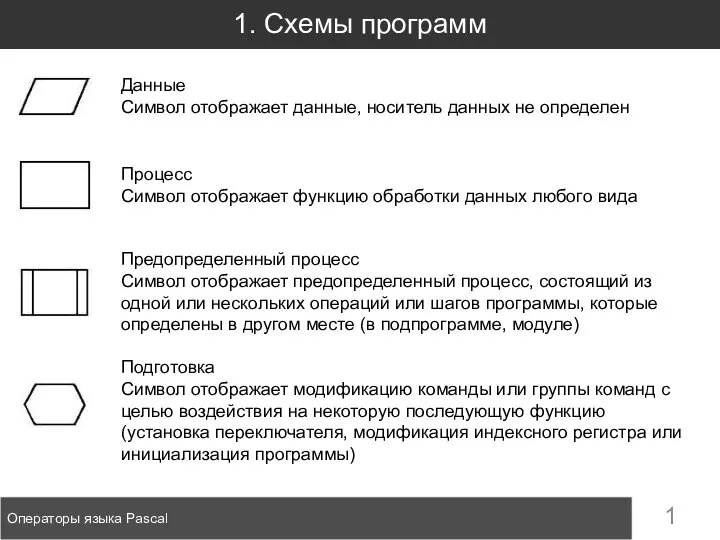 Схемы программ
Схемы программ Lektsia_2_Chast_1_Strukturn_organizatsia_EVM_i_VS
Lektsia_2_Chast_1_Strukturn_organizatsia_EVM_i_VS Описание нормальных форм базы данных
Описание нормальных форм базы данных Состав и работа ПК
Состав и работа ПК Проект Лабиринт
Проект Лабиринт Основные компоненты компьютера и их функции
Основные компоненты компьютера и их функции Средства связи правоохранительных органов
Средства связи правоохранительных органов Sovereign Digital. Правки заказчика
Sovereign Digital. Правки заказчика Работа с деформированным текстом
Работа с деформированным текстом Локальные сети. 8 класс
Локальные сети. 8 класс Программное обеспечение. Тема 1. Введение
Программное обеспечение. Тема 1. Введение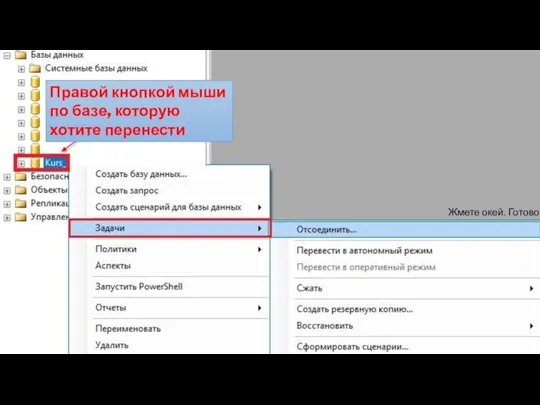 Перенос базы SQL
Перенос базы SQL Activity. Объектно - ориентированное программирование
Activity. Объектно - ориентированное программирование Алгоритмизация и программирование
Алгоритмизация и программирование Обновление тарифов по опции Снятие наличных
Обновление тарифов по опции Снятие наличных Создание легкой в обращении программы для отслеживания интересующих интернет-источников, и взаимодействия с ними
Создание легкой в обращении программы для отслеживания интересующих интернет-источников, и взаимодействия с ними Циклы. Алгоритмическая конструкция
Циклы. Алгоритмическая конструкция Кодирование и декодирование данных
Кодирование и декодирование данных