- Работа с ПЛК cерий BX и BC

Содержание
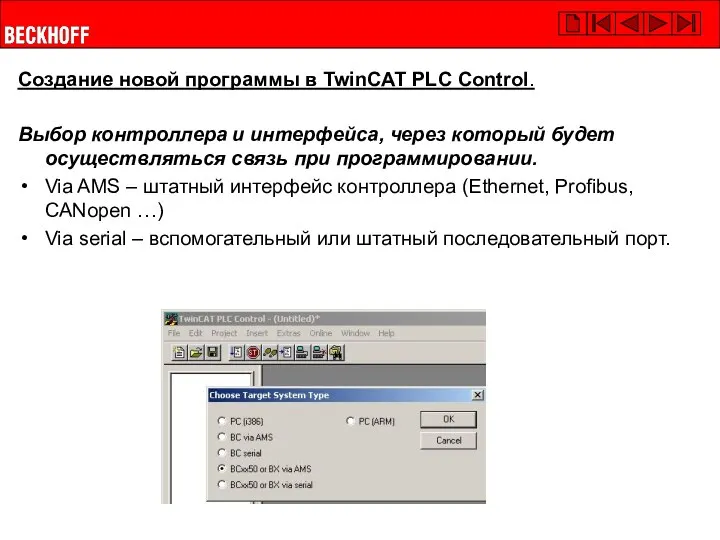
- 2. Создание новой программы в TwinCAT PLC Control. Выбор контроллера и интерфейса, через который будет осуществляться связь
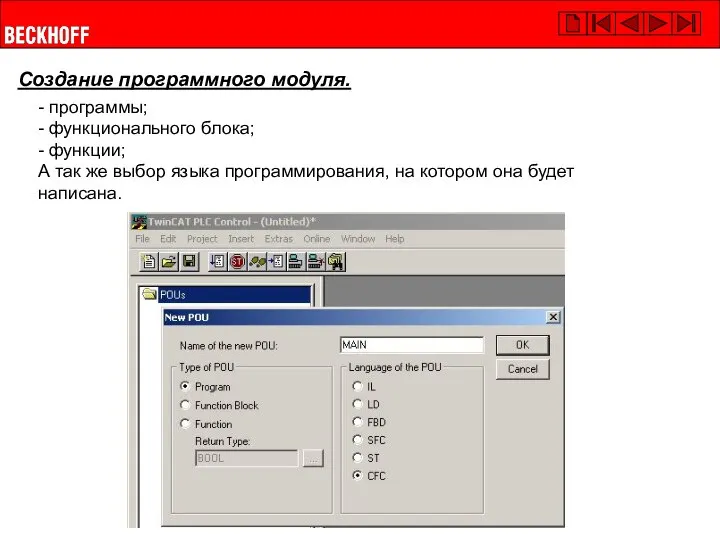
- 3. Создание программного модуля. - программы; - функционального блока; - функции; А так же выбор языка программирования,
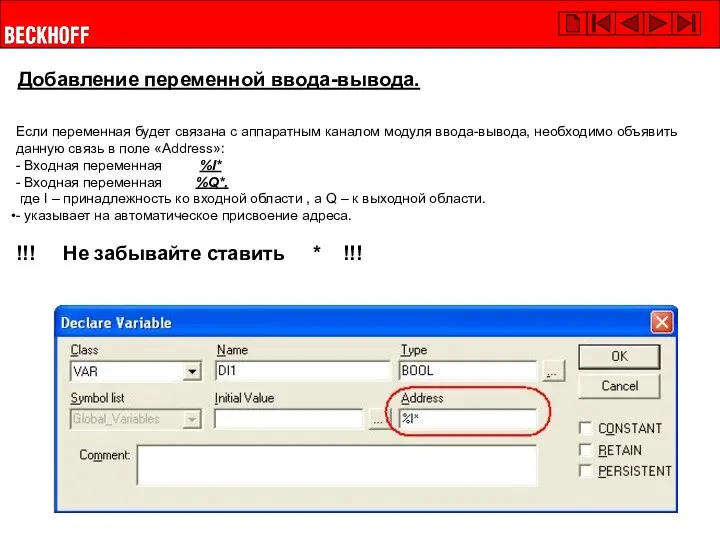
- 4. Добавление переменной ввода-вывода. Если переменная будет связана с аппаратным каналом модуля ввода-вывода, необходимо объявить данную связь
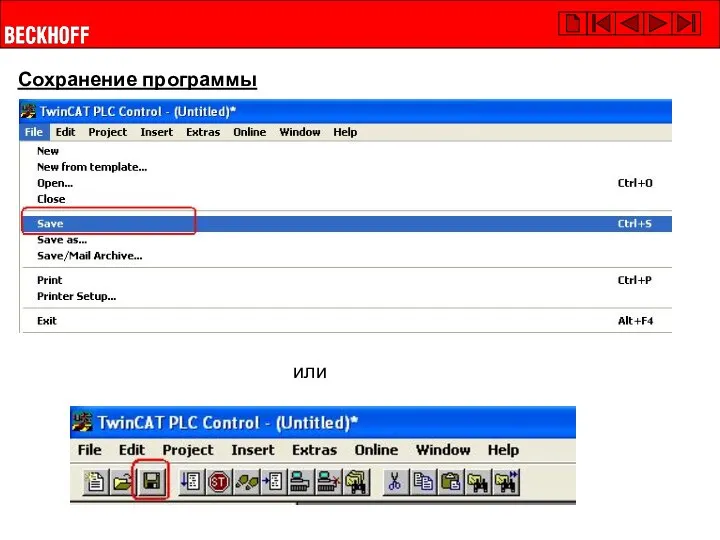
- 5. Сохранение программы или
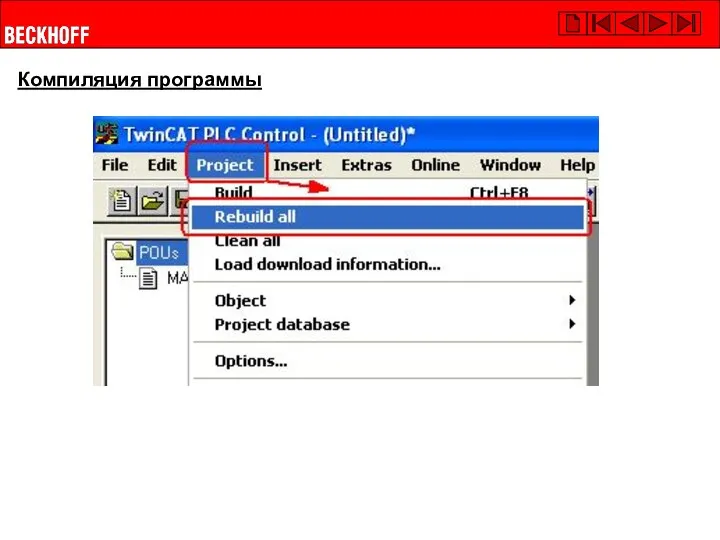
- 6. Компиляция программы
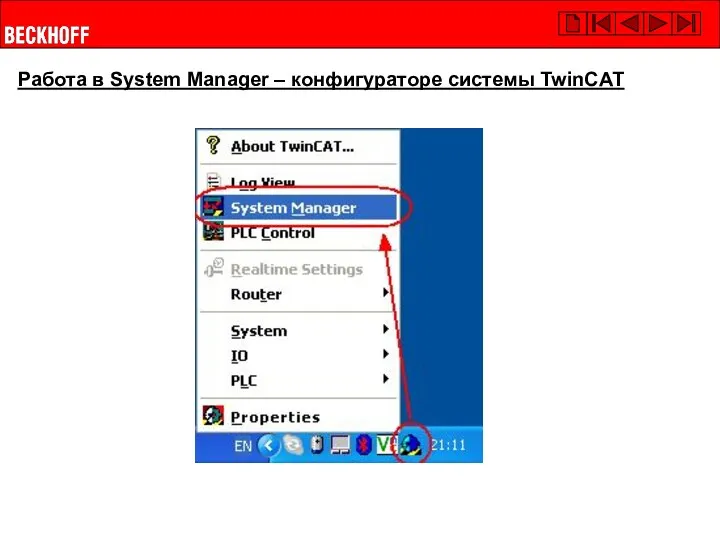
- 7. Работа в System Manager – конфигураторе системы TwinCAT
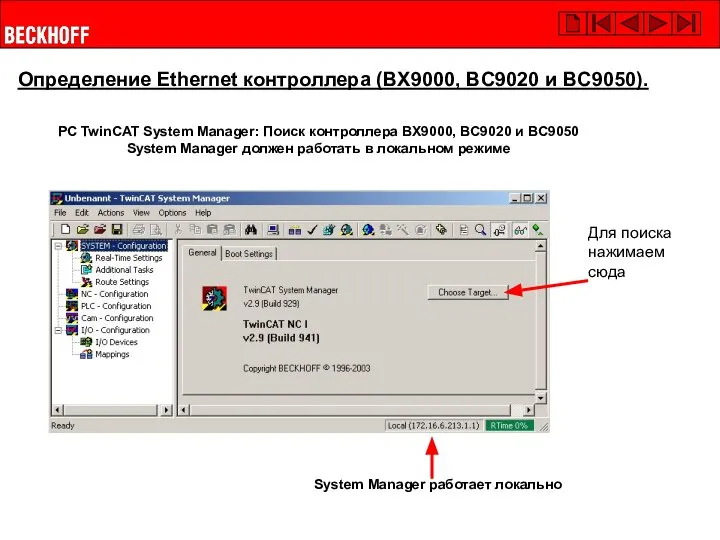
- 8. PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050 System Manager должен работать в локальном
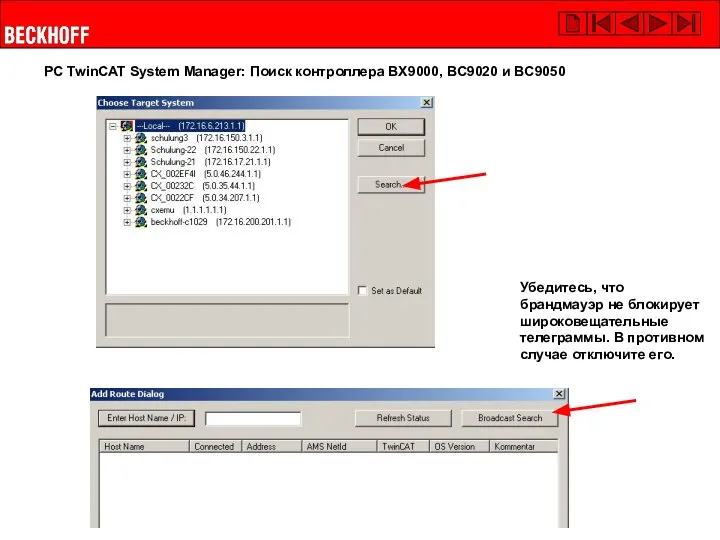
- 9. PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050 Убедитесь, что брандмауэр не блокирует широковещательные
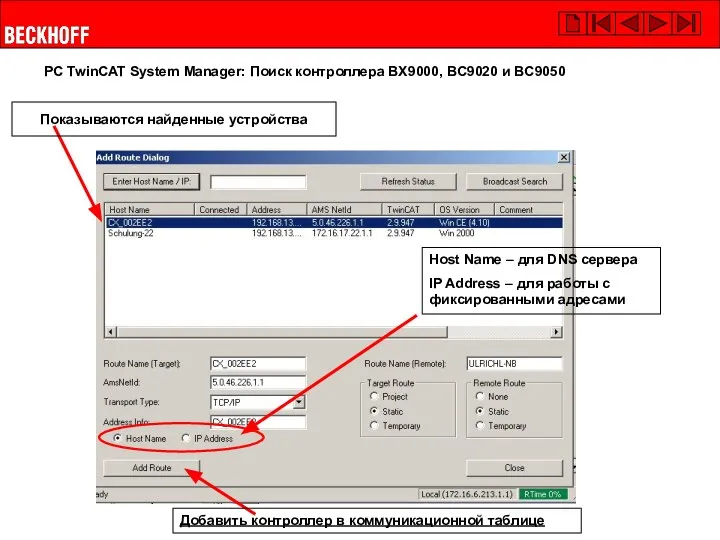
- 10. PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050 Добавить контроллер в коммуникационной таблице Host
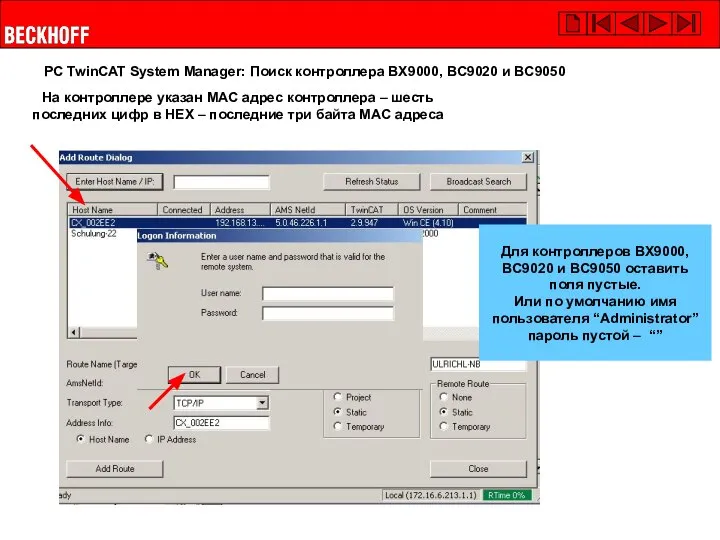
- 11. На контроллере указан MAC адрес контроллера – шесть последних цифр в HEX – последние три байта
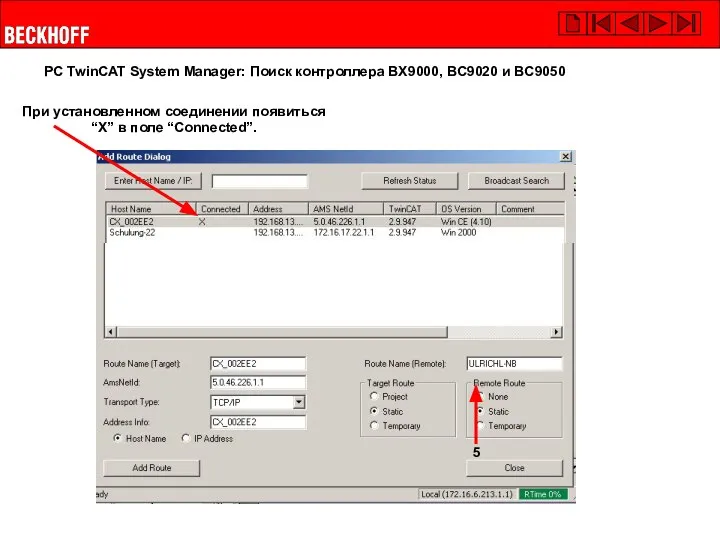
- 12. При установленном соединении появиться “X” в поле “Connected”. PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020
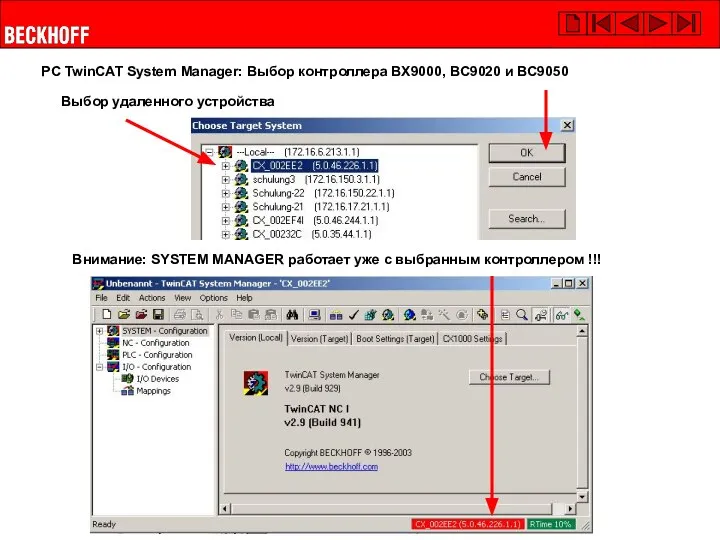
- 13. Выбор удаленного устройства Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!! PC TwinCAT System Manager:
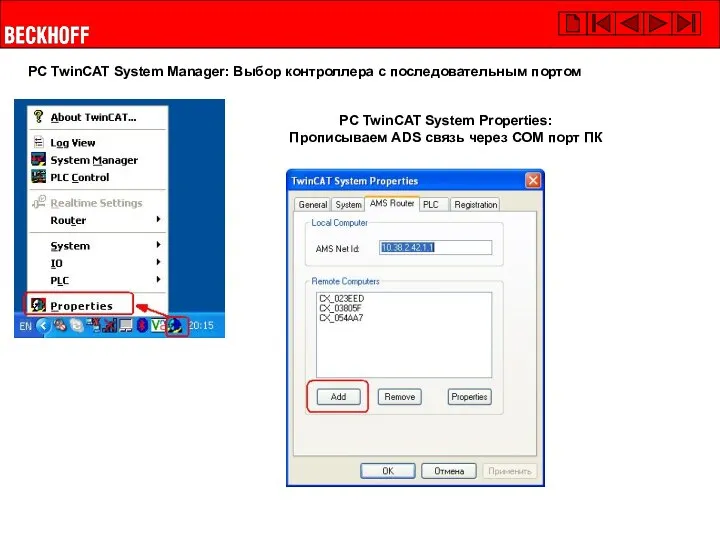
- 14. PC TwinCAT System Manager: Выбор контроллера с последовательным портом PC TwinCAT System Properties: Прописываем ADS связь
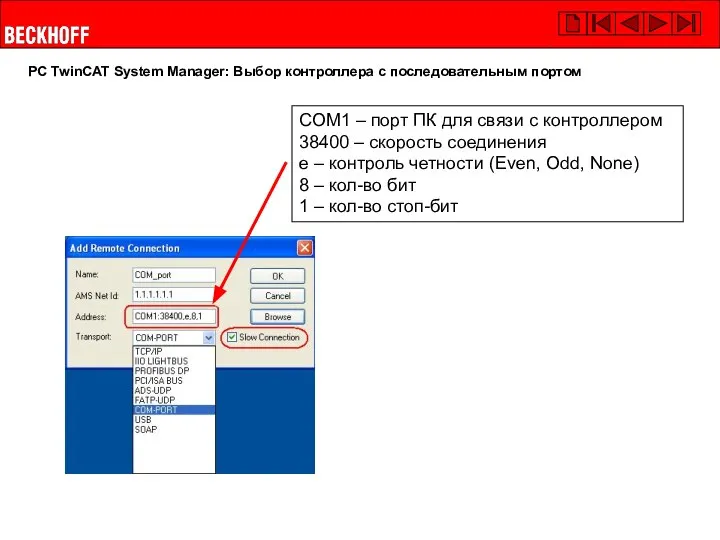
- 15. PC TwinCAT System Manager: Выбор контроллера с последовательным портом COM1 – порт ПК для связи с
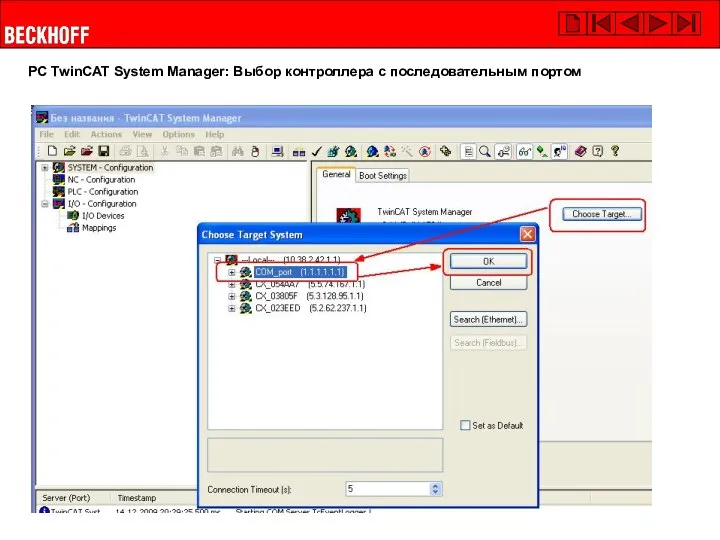
- 16. PC TwinCAT System Manager: Выбор контроллера с последовательным портом
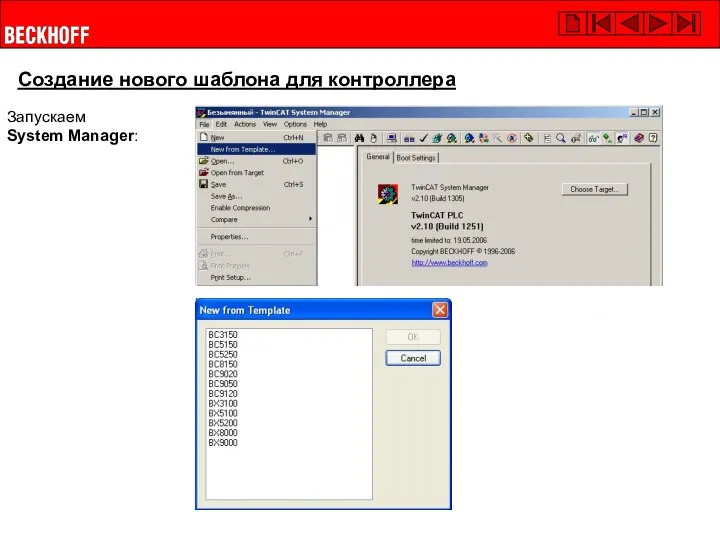
- 17. Создание нового шаблона для контроллера Запускаем System Manager:
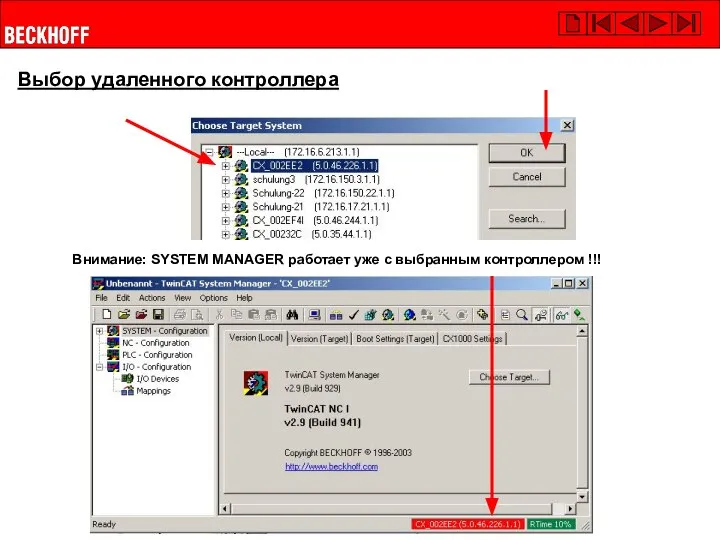
- 18. Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!! Выбор удаленного контроллера
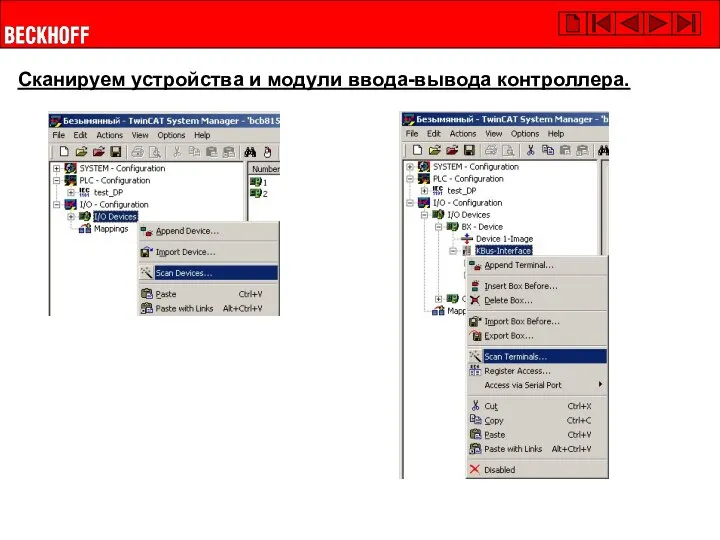
- 19. Сканируем устройства и модули ввода-вывода контроллера.
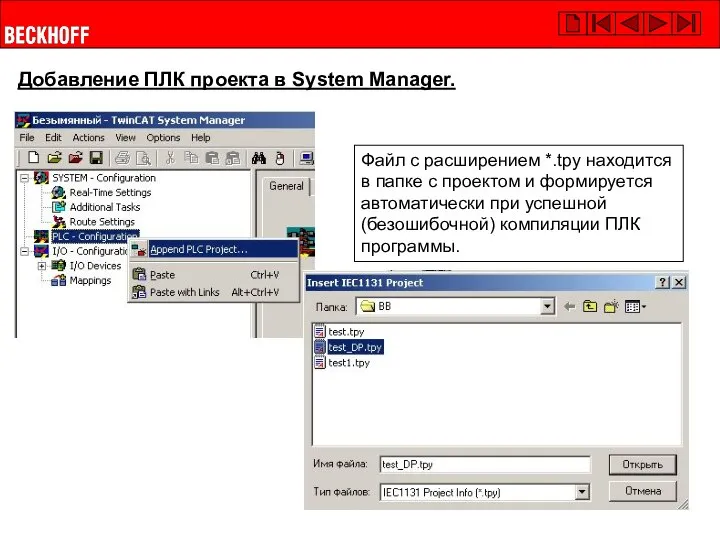
- 20. Добавление ПЛК проекта в System Manager. Файл с расширением *.tpy находится в папке с проектом и
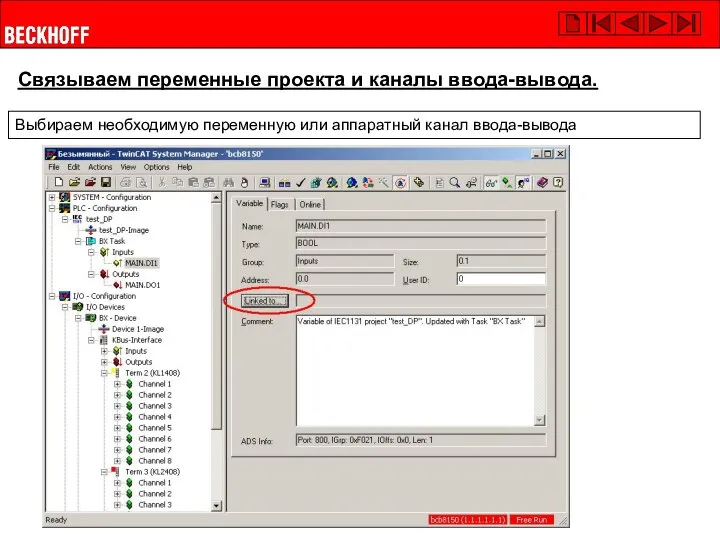
- 21. Связываем переменные проекта и каналы ввода-вывода. Выбираем необходимую переменную или аппаратный канал ввода-вывода
- 22. Связываем переменные проекта и каналы ввода-вывода. При связывании переменной появляется список аппаратных каналов и наоборот Выбор
- 23. Создание карты адресного пространства После создания связей генерируем карту адресного пространства
- 24. Создание карты адресного пространства Если установлено соединение с контроллером, то можно одновременно создать карту памяти и
- 25. Для того, чтобы адресация прописалась в программе, делаем компиляцию в TwinCAT PLC Control:
- 26. Загрузка программы: Выбираем контроллер
- 27. Подключение к контроллеру
- 28. Запуск программы
- 30. Скачать презентацию
Слайд 3Создание программного модуля.
- программы;
- функционального блока;
- функции;
А так же выбор языка программирования,
Создание программного модуля.
- программы;
- функционального блока;
- функции;
А так же выбор языка программирования,
Слайд 4Добавление переменной ввода-вывода.
Если переменная будет связана с аппаратным каналом модуля ввода-вывода, необходимо
Добавление переменной ввода-вывода.
Если переменная будет связана с аппаратным каналом модуля ввода-вывода, необходимо
Слайд 5Сохранение программы
или
Сохранение программы
или
Слайд 6Компиляция программы
Компиляция программы
Слайд 7Работа в System Manager – конфигураторе системы TwinCAT
Работа в System Manager – конфигураторе системы TwinCAT
Слайд 8PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
System Manager должен
PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
System Manager должен
Слайд 9PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
Убедитесь, что брандмауэр
PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
Убедитесь, что брандмауэр
Слайд 10PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
Добавить контроллер в
PC TwinCAT System Manager: Поиск контроллера BX9000, BC9020 и BC9050
Добавить контроллер в
Слайд 11На контроллере указан MAC адрес контроллера – шесть последних цифр в HEX
На контроллере указан MAC адрес контроллера – шесть последних цифр в HEX
Слайд 12При установленном соединении появиться “X” в поле “Connected”.
PC TwinCAT System Manager: Поиск
При установленном соединении появиться “X” в поле “Connected”.
PC TwinCAT System Manager: Поиск
Слайд 13Выбор удаленного устройства
Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!!
PC TwinCAT
Выбор удаленного устройства
Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!!
PC TwinCAT
Слайд 14PC TwinCAT System Manager: Выбор контроллера с последовательным портом
PC TwinCAT System Properties:
PC TwinCAT System Manager: Выбор контроллера с последовательным портом
PC TwinCAT System Properties:
Слайд 15PC TwinCAT System Manager: Выбор контроллера с последовательным портом
COM1 – порт ПК
PC TwinCAT System Manager: Выбор контроллера с последовательным портом
COM1 – порт ПК
Слайд 16PC TwinCAT System Manager: Выбор контроллера с последовательным портом
PC TwinCAT System Manager: Выбор контроллера с последовательным портом
Слайд 17Создание нового шаблона для контроллера
Запускаем
System Manager:
Создание нового шаблона для контроллера
Запускаем
System Manager:
Слайд 18Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!!
Выбор удаленного контроллера
Внимание: SYSTEM MANAGER работает уже с выбранным контроллером !!!
Выбор удаленного контроллера
Слайд 19Сканируем устройства и модули ввода-вывода контроллера.
Сканируем устройства и модули ввода-вывода контроллера.
Слайд 20Добавление ПЛК проекта в System Manager.
Файл с расширением *.tpy находится в папке
Добавление ПЛК проекта в System Manager.
Файл с расширением *.tpy находится в папке
Слайд 21Связываем переменные проекта и каналы ввода-вывода.
Выбираем необходимую переменную или аппаратный канал ввода-вывода
Связываем переменные проекта и каналы ввода-вывода.
Выбираем необходимую переменную или аппаратный канал ввода-вывода
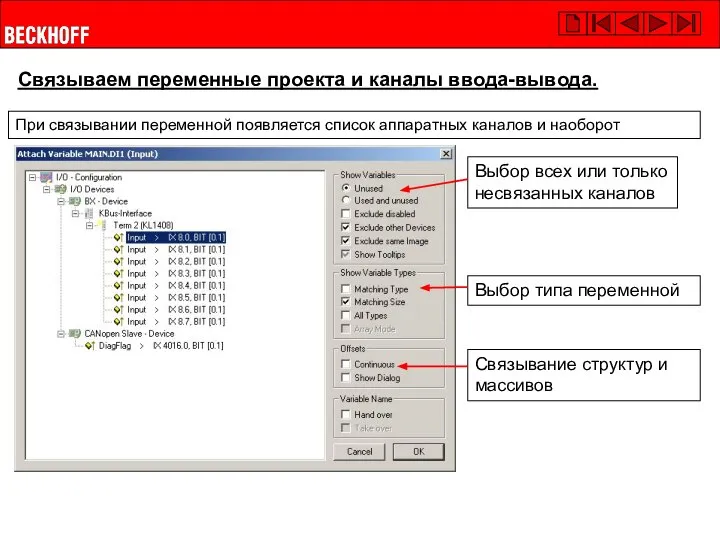
Слайд 22Связываем переменные проекта и каналы ввода-вывода.
При связывании переменной появляется список аппаратных каналов
Связываем переменные проекта и каналы ввода-вывода.
При связывании переменной появляется список аппаратных каналов
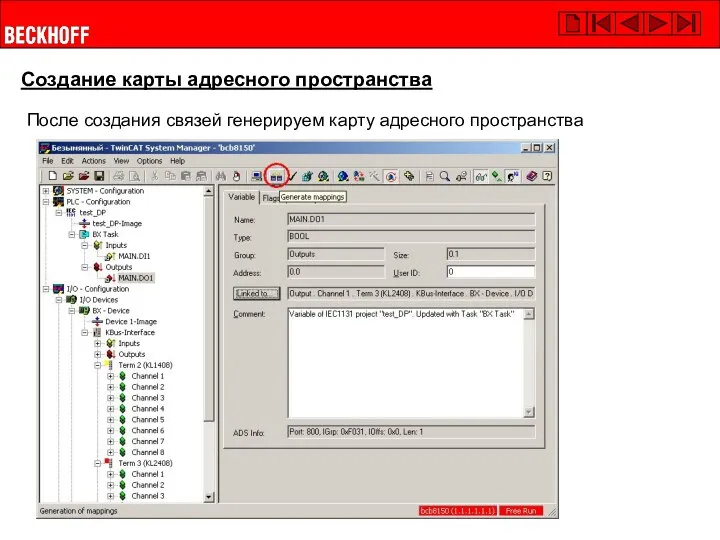
Слайд 23Создание карты адресного пространства
После создания связей генерируем карту адресного пространства
Создание карты адресного пространства
После создания связей генерируем карту адресного пространства
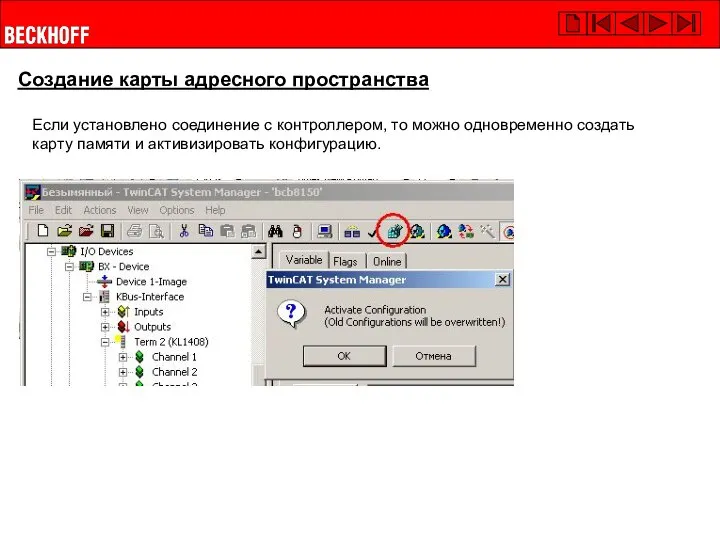
Слайд 24Создание карты адресного пространства
Если установлено соединение с контроллером, то можно одновременно создать
Создание карты адресного пространства
Если установлено соединение с контроллером, то можно одновременно создать
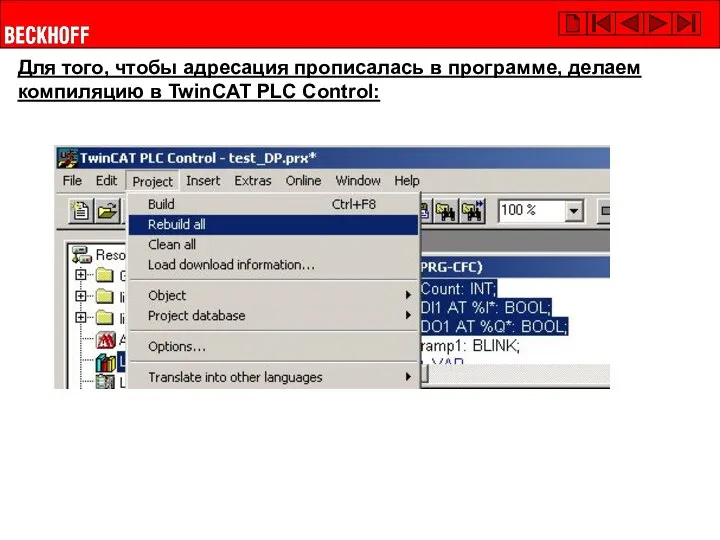
Слайд 25Для того, чтобы адресация прописалась в программе, делаем компиляцию в TwinCAT PLC
Для того, чтобы адресация прописалась в программе, делаем компиляцию в TwinCAT PLC
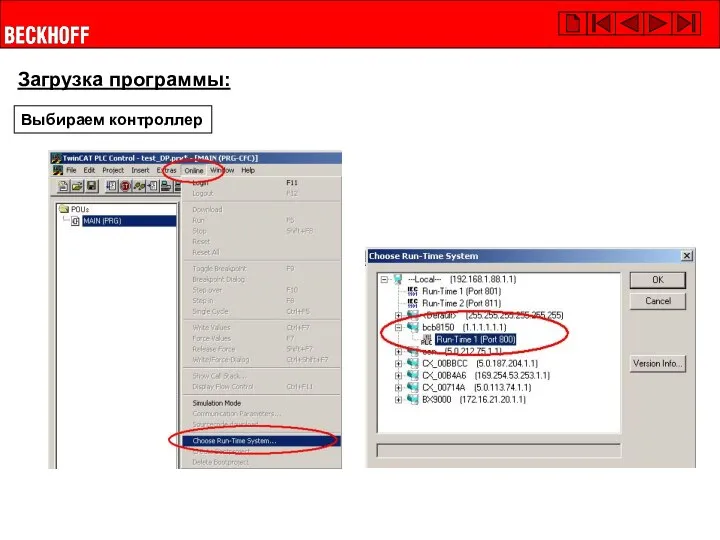
Слайд 26Загрузка программы:
Выбираем контроллер
Загрузка программы:
Выбираем контроллер
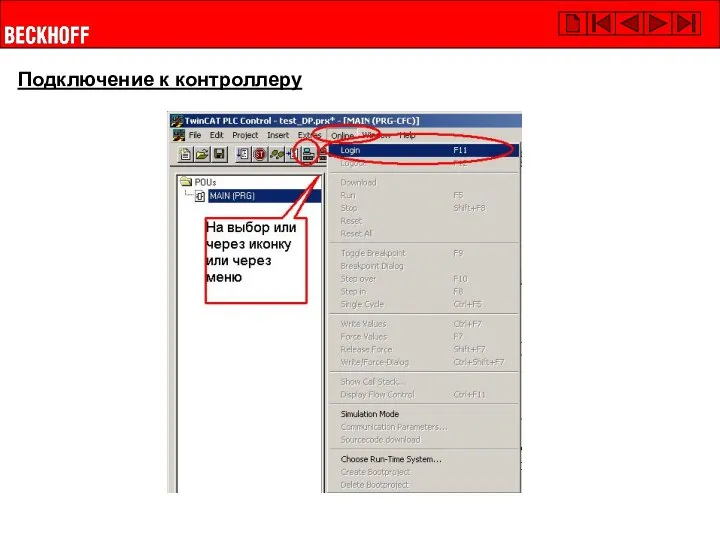
Слайд 27Подключение к контроллеру
Подключение к контроллеру
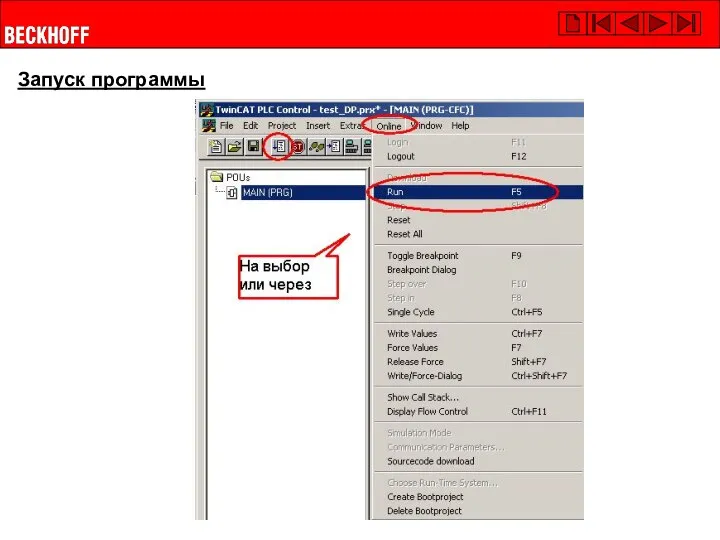
Слайд 28Запуск программы
Запуск программы
 Интерактивная игра Знакомство с ПК
Интерактивная игра Знакомство с ПК Как в Асиде посмотреть аннотации и карты компетенций ООП (для педагогов)
Как в Асиде посмотреть аннотации и карты компетенций ООП (для педагогов) Новинки научной литературы
Новинки научной литературы 4eb6bf5c-266f-4f40-8f94-f85fa7e48a6c
4eb6bf5c-266f-4f40-8f94-f85fa7e48a6c УЦ УГМК-Холдинг
УЦ УГМК-Холдинг Решение задач линейной структуры на языке программирования Turbo pascal. Электромагнитная индукция
Решение задач линейной структуры на языке программирования Turbo pascal. Электромагнитная индукция Логические основы ЭВМ
Логические основы ЭВМ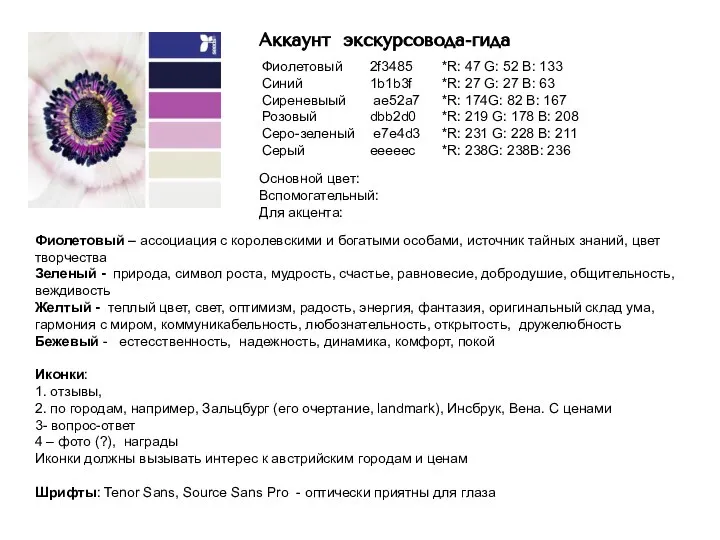 Аккаунт экскурсовода-гида
Аккаунт экскурсовода-гида Презентация на тему Массивы
Презентация на тему Массивы  ГИС Карандаш 5 класс
ГИС Карандаш 5 класс Шаблон ВКР: Разработка и исследование методов на основе машинного обучения для распознавания дорожных знаков
Шаблон ВКР: Разработка и исследование методов на основе машинного обучения для распознавания дорожных знаков Что такое кибербуллинг и как с ним бороться. Памятка для детей и родителей
Что такое кибербуллинг и как с ним бороться. Памятка для детей и родителей Алгоритмические языки и программирование. Стандартные потоки
Алгоритмические языки и программирование. Стандартные потоки Зашифрованная переписка
Зашифрованная переписка IV Чемпионат по компьютерному многоборью среди пенсионеров Кировской области
IV Чемпионат по компьютерному многоборью среди пенсионеров Кировской области _Создание web-сайта_ (1)
_Создание web-сайта_ (1) Устройства ввода и вывода информации. 8 класс (3)
Устройства ввода и вывода информации. 8 класс (3) Презентация на тему Вероятность и информация
Презентация на тему Вероятность и информация  Интерактивный интернет-ресурс спортивных прогнозов и аналитики
Интерактивный интернет-ресурс спортивных прогнозов и аналитики Работа с файлами
Работа с файлами Об’єктно-орієнтоване програмування. Лекція №0
Об’єктно-орієнтоване програмування. Лекція №0 Устройства для хранения и переноса информации
Устройства для хранения и переноса информации Игра Лабиринт 4.5
Игра Лабиринт 4.5 Порядок действий ликвидации последствий сбоев системы, кибератак. Возможные пути решения проблемы. Занятие 5
Порядок действий ликвидации последствий сбоев системы, кибератак. Возможные пути решения проблемы. Занятие 5 Устройство компьютера
Устройство компьютера Волк и семеро козлят. Правила безопасного поведения в Интернете
Волк и семеро козлят. Правила безопасного поведения в Интернете Путешествуй. Блог
Путешествуй. Блог Разработка автоматизированной информационной системы для ИТ-службы
Разработка автоматизированной информационной системы для ИТ-службы