- Разработка интеллектуальной многоагентной системы адаптивных роботов для игры в футбол

Содержание
- 2. Введение RoboCup Стратегия победы: гибкость системы эффективность анализа стратегии соперника наличие локальных стратегий у каждого робота
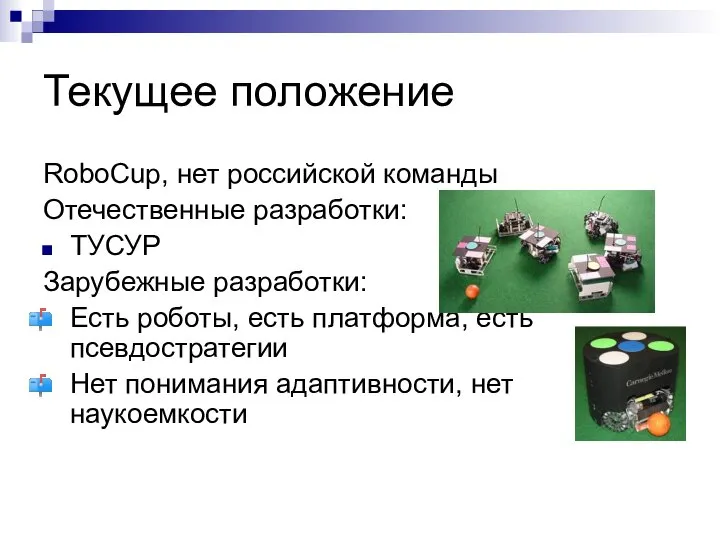
- 3. Текущее положение RoboCup, нет российской команды Отечественные разработки: ТУСУР Зарубежные разработки: Есть роботы, есть платформа, есть
- 4. Постановка задачи Создание интеллектуальной многоагентной системы реального времени адаптивных роботов с физической реализацией
- 5. Актуальность Отсутствие аналогов в России Лига межвузовских соревнований и школьных соревнований Востребованность внедрения доступной системы обучения
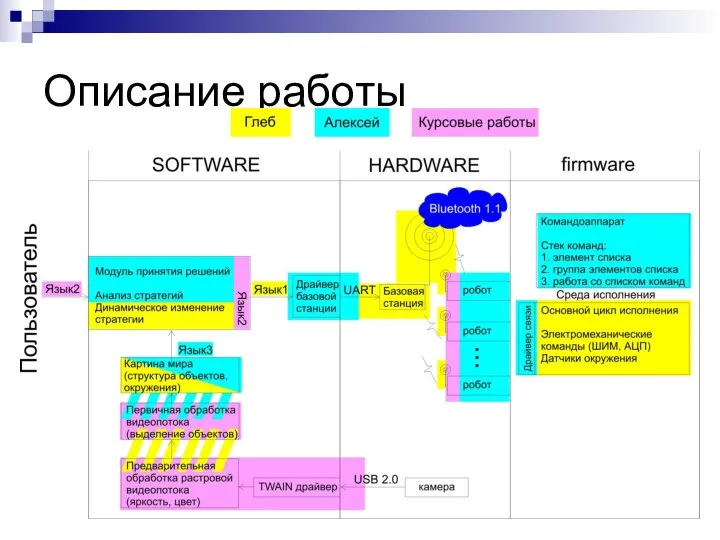
- 6. Описание работы
- 7. Описание работы
- 8. Описание работы Глеба
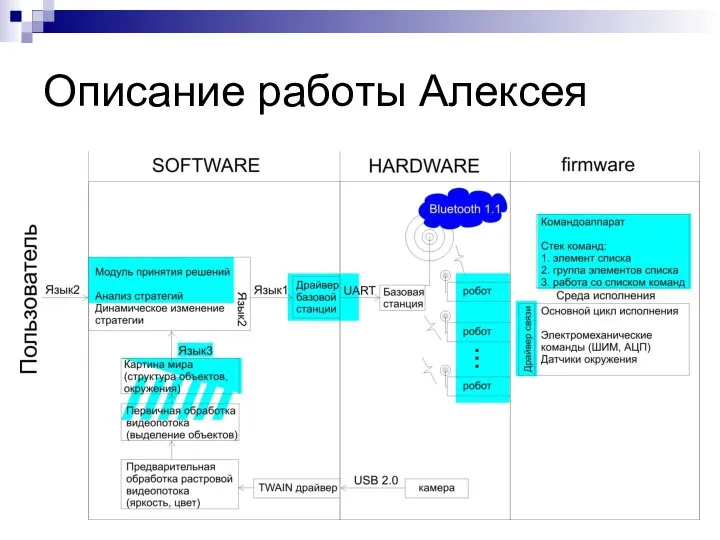
- 9. Описание работы Алексея
- 10. Описание работы Подбор компонентов Функциональная схема Принципиальная схема Разводка Монтаж Микрокод Отладка
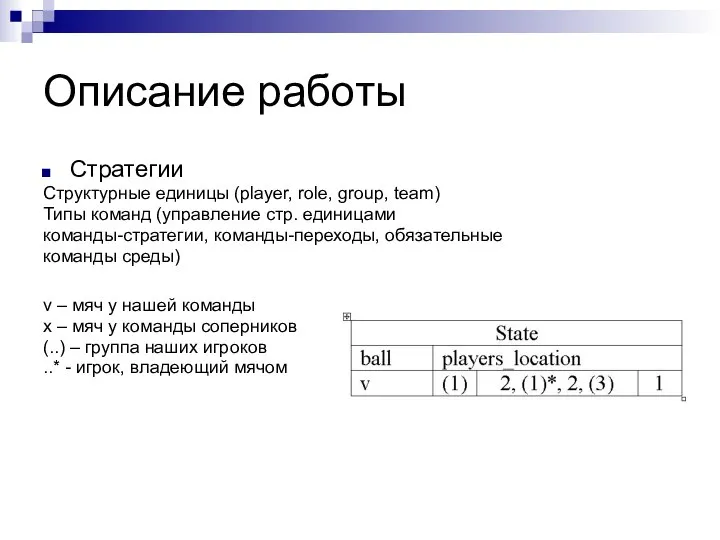
- 11. Описание работы Стратегии Структурные единицы (player, role, group, team) Типы команд (управление стр. единицами команды-стратегии, команды-переходы,
- 12. Описание работы (в рамках курсовых) Теплых Дарья Реализация предварительной обработки видеосигнала, монтаж платы Данилова Юлия Первичная
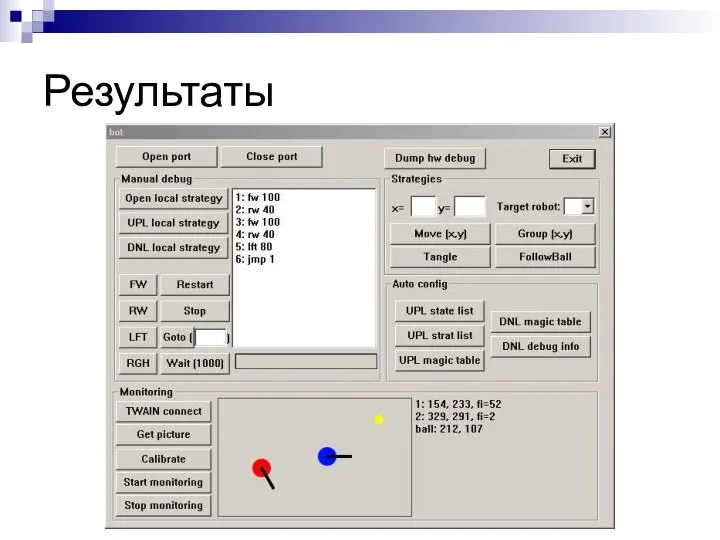
- 13. Результаты Роботы Базовая станция Картина мира Управляющий модель (анализ, изменение стратегий) Предварительная обработка видеосигнала Первичная обработка
- 14. Результаты
- 15. Выводы Разработанная система может претендовать на победу, потому что: Распознает стратегию противника Подстраивается под стратегии противника
- 17. Скачать презентацию
Слайд 2Введение
RoboCup
Стратегия победы:
гибкость системы
эффективность анализа стратегии соперника
наличие локальных стратегий у каждого робота
изменение стратегии
Введение
RoboCup
Стратегия победы:
гибкость системы
эффективность анализа стратегии соперника
наличие локальных стратегий у каждого робота
изменение стратегии
Слайд 3Текущее положение
RoboCup, нет российской команды
Отечественные разработки:
ТУСУР
Зарубежные разработки:
Есть роботы, есть платформа, есть псевдостратегии
Нет
Текущее положение
RoboCup, нет российской команды
Отечественные разработки:
ТУСУР
Зарубежные разработки:
Есть роботы, есть платформа, есть псевдостратегии
Нет
Слайд 4Постановка задачи
Создание
интеллектуальной
многоагентной
системы реального времени
адаптивных роботов
с физической реализацией
Постановка задачи
Создание
интеллектуальной
многоагентной
системы реального времени
адаптивных роботов
с физической реализацией
Слайд 5Актуальность
Отсутствие аналогов в России
Лига межвузовских соревнований и школьных соревнований
Востребованность внедрения доступной системы
Актуальность
Отсутствие аналогов в России
Лига межвузовских соревнований и школьных соревнований
Востребованность внедрения доступной системы
Слайд 6Описание работы
Описание работы

Слайд 7Описание работы
Описание работы
Слайд 8Описание работы Глеба
Описание работы Глеба

Слайд 9Описание работы Алексея
Описание работы Алексея
Слайд 10Описание работы
Подбор компонентов
Функциональная схема
Принципиальная схема
Разводка
Монтаж
Микрокод
Отладка
Описание работы
Подбор компонентов
Функциональная схема
Принципиальная схема
Разводка
Монтаж
Микрокод
Отладка

Слайд 11Описание работы
Стратегии
Структурные единицы (player, role, group, team)
Типы команд (управление стр. единицами
команды-стратегии, команды-переходы,
Описание работы
Стратегии
Структурные единицы (player, role, group, team)
Типы команд (управление стр. единицами
команды-стратегии, команды-переходы,
Слайд 12Описание работы (в рамках курсовых)
Теплых Дарья
Реализация предварительной обработки видеосигнала,
монтаж платы
Данилова Юлия
Первичная обработка
Описание работы (в рамках курсовых)
Теплых Дарья
Реализация предварительной обработки видеосигнала,
монтаж платы
Данилова Юлия
Первичная обработка
Слайд 13Результаты
Роботы
Базовая станция
Картина мира
Управляющий модель
(анализ, изменение стратегий)
Предварительная обработка
видеосигнала
Первичная обработка
видеосигнала
Результаты
Роботы
Базовая станция
Картина мира
Управляющий модель
(анализ, изменение стратегий)
Предварительная обработка
видеосигнала
Первичная обработка
видеосигнала

Слайд 14Результаты
Результаты
Слайд 15Выводы
Разработанная система может претендовать на победу, потому что:
Распознает стратегию противника
Подстраивается под стратегии
Выводы
Разработанная система может претендовать на победу, потому что:
Распознает стратегию противника
Подстраивается под стратегии
 ООП на Delphi
ООП на Delphi Модель OSI
Модель OSI Передача информации в компьютерных сетях Аппаратное и программное обеспечение работы глобальной сети 9-3
Передача информации в компьютерных сетях Аппаратное и программное обеспечение работы глобальной сети 9-3 Основные понятия программного обеспечения
Основные понятия программного обеспечения Презентация "Информационная безопасность" - скачать презентации по Информатике
Презентация "Информационная безопасность" - скачать презентации по Информатике Оператор выбора Case
Оператор выбора Case Стили слоя в Photoshop
Стили слоя в Photoshop Трудовая деятельность. Компьютерные сети
Трудовая деятельность. Компьютерные сети Основы языка программирования Java
Основы языка программирования Java Алгоритмические языки
Алгоритмические языки Средства вычислительной техники. Введение
Средства вычислительной техники. Введение Библиотека и молодёжь
Библиотека и молодёжь Лингвистика для математиков
Лингвистика для математиков Компоновщик. Что такое компоновщик?
Компоновщик. Что такое компоновщик? Составление алгоритма
Составление алгоритма Annual Report - Powerpoint Template
Annual Report - Powerpoint Template ВКР: Технология автоматизированной обработки текста. Шаблон
ВКР: Технология автоматизированной обработки текста. Шаблон Алгоритмы и исполнители. Основы алгоритмизации
Алгоритмы и исполнители. Основы алгоритмизации Копирование фрагментов. Графический редактор Paint
Копирование фрагментов. Графический редактор Paint В мире кодов
В мире кодов Помощь в удалении сертификатов
Помощь в удалении сертификатов Prezentatsia_Microsoft_PowerPoint
Prezentatsia_Microsoft_PowerPoint Анимация летящего снега
Анимация летящего снега Installation testing mentoring program for manual QA
Installation testing mentoring program for manual QA Цифровые технологии. Лекция 1
Цифровые технологии. Лекция 1 InterBase
InterBase Файловая система
Файловая система Пропозициональная логика 1
Пропозициональная логика 1