- Реализация метода пропорционального сближения

Содержание
- 2. Направление вектора скорости V определяется двумя углами:
- 3. Схема в вертикальной или горизонтальной плоскостях
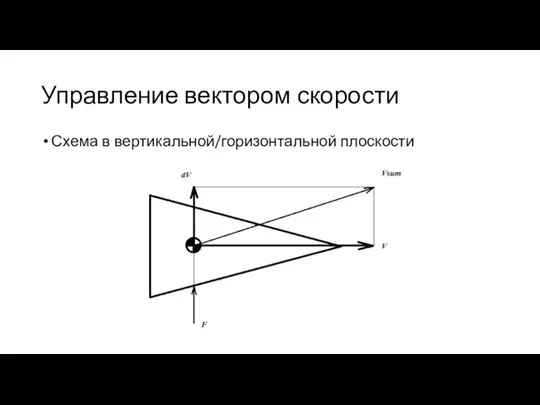
- 4. Управление вектором скорости Схема в вертикальной/горизонтальной плоскости
- 5. Допущения: Начальный угол атаки равен нулю. Блок стабилизирован по тангажу, рысканию и крену. Угол крена равен
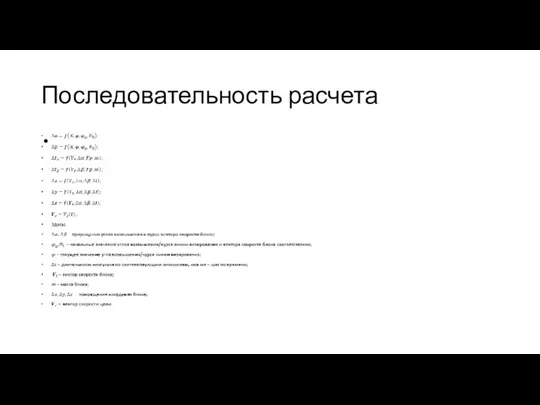
- 6. Последовательность расчета
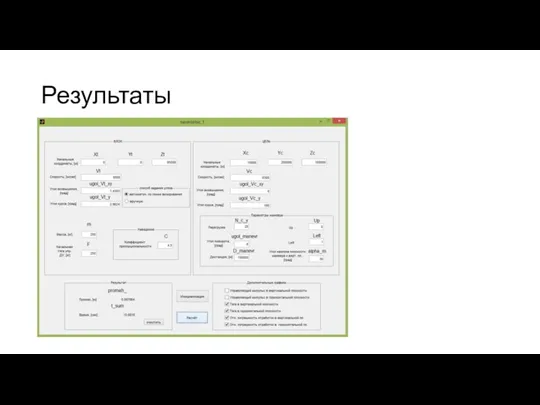
- 7. Результаты
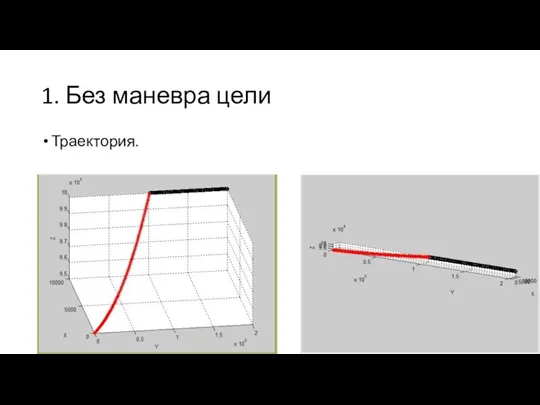
- 8. 1. Без маневра цели Траектория.
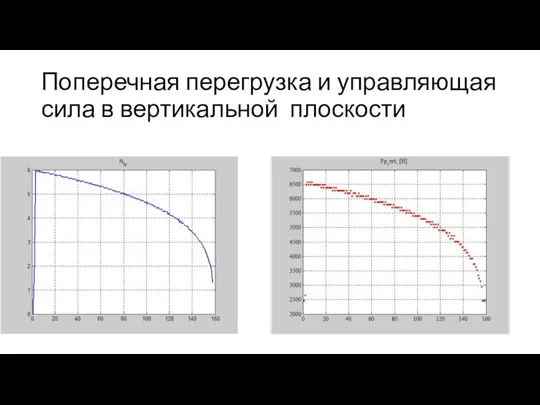
- 9. Поперечная перегрузка и управляющая сила в вертикальной плоскости
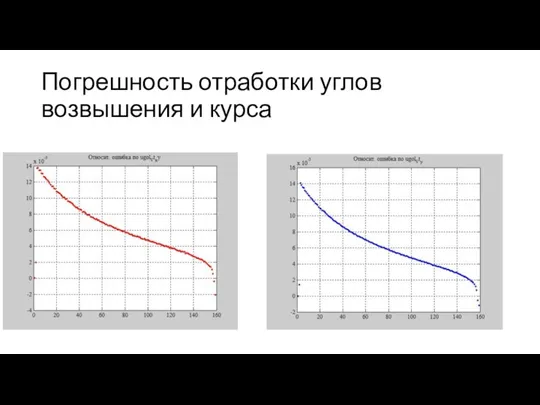
- 10. Погрешность отработки углов возвышения и курса
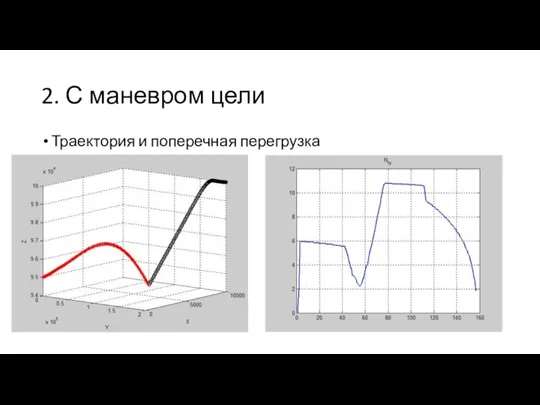
- 11. 2. С маневром цели Траектория и поперечная перегрузка
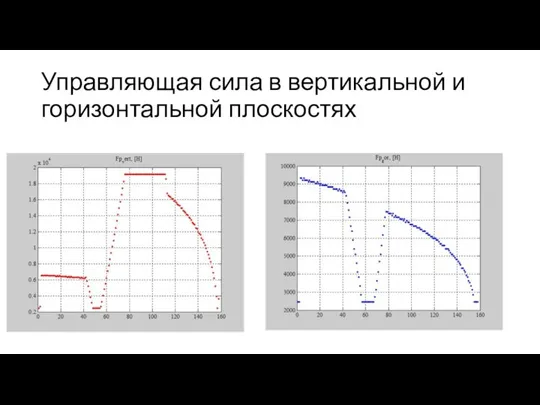
- 12. Управляющая сила в вертикальной и горизонтальной плоскостях
- 14. Скачать презентацию

Слайд 3Схема в вертикальной или горизонтальной плоскостях
Схема в вертикальной или горизонтальной плоскостях

Слайд 4Управление вектором скорости
Схема в вертикальной/горизонтальной плоскости
Управление вектором скорости
Схема в вертикальной/горизонтальной плоскости
Слайд 5Допущения:
Начальный угол атаки равен нулю.
Блок стабилизирован по тангажу, рысканию и крену.
Угол крена
Допущения:
Начальный угол атаки равен нулю.
Блок стабилизирован по тангажу, рысканию и крену.
Угол крена
Слайд 6Последовательность расчета
Последовательность расчета
Слайд 7Результаты
Результаты
Слайд 81. Без маневра цели
Траектория.
1. Без маневра цели
Траектория.
Слайд 9Поперечная перегрузка и управляющая сила в вертикальной плоскости
Поперечная перегрузка и управляющая сила в вертикальной плоскости
Слайд 10Погрешность отработки углов возвышения и курса
Погрешность отработки углов возвышения и курса
Слайд 112. С маневром цели
Траектория и поперечная перегрузка
2. С маневром цели
Траектория и поперечная перегрузка
Слайд 12Управляющая сила в вертикальной и горизонтальной плоскостях
Управляющая сила в вертикальной и горизонтальной плоскостях
 Системы координат. Справочная система. Занятие №3
Системы координат. Справочная система. Занятие №3 Преобразование графических изображений. Дорожные знаки
Преобразование графических изображений. Дорожные знаки Использование Set операторов
Использование Set операторов Организация проектной и научно-исследовательской деятельности обучающихся на базе лаборатории информатики и ИКТ
Организация проектной и научно-исследовательской деятельности обучающихся на базе лаборатории информатики и ИКТ 218668
218668 Схематичное расположение
Схематичное расположение Презентация "Информационно-коммуникационные технологии в образовании" - скачать презентации по Информатике
Презентация "Информационно-коммуникационные технологии в образовании" - скачать презентации по Информатике 1 С
1 С Глобальная сеть и интернет
Глобальная сеть и интернет Модели и задачи Data Mining
Модели и задачи Data Mining Технология создания видеороликов посредством специализированных программ и их публикации в сети интернет
Технология создания видеороликов посредством специализированных программ и их публикации в сети интернет Site Tour 3
Site Tour 3 ООО АЙВИС. Вашу рекламу видно и слышно
ООО АЙВИС. Вашу рекламу видно и слышно Что такое компьютерная графика
Что такое компьютерная графика Клиент Сервер
Клиент Сервер Встреча Третья. Web-дизайн против проектирования интерфейсов
Встреча Третья. Web-дизайн против проектирования интерфейсов Компьютерные вирусы
Компьютерные вирусы Интернет. Введение
Интернет. Введение Программное обеспечение модема
Программное обеспечение модема Поколения ЭВМ
Поколения ЭВМ Информационный центр комплексного диагностического контроля ходовых частей (ИЦ-КДК)
Информационный центр комплексного диагностического контроля ходовых частей (ИЦ-КДК) Медиа-безопасность. Социальные сети
Медиа-безопасность. Социальные сети Защита информационных процессов в компьютерных системах
Защита информационных процессов в компьютерных системах Группа ВК Деловые люди
Группа ВК Деловые люди Знаменитые библиотеки мира
Знаменитые библиотеки мира РВО софт
РВО софт Критерии приемки и определение выполненного
Критерии приемки и определение выполненного Презентация Черноволенко Алины 10 класс МОУ «СОШ № 5» ТОРЖОК 2011
Презентация Черноволенко Алины 10 класс МОУ «СОШ № 5» ТОРЖОК 2011