- Семинар 5. Моделирование линейных звеньев

Содержание
- 2. Тема занятия: Моделирование линейных звеньев Цели занятия: освоить построение основных характеристик непрерывных и дискретных линейных звеньев
- 3. Преобразование сигналов Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и нелинейных звеньев Формально
- 4. Коэффициент передачи Линейное звено описывается дифференциальным уравнением: Нам достаточно научиться его решать для воздействия а потом
- 5. Коэффициент передачи Нетрудно заметить, что в этом случае Да это же не только комплексная амплитуда, но
- 6. Коэффициент передачи clear all; clc; close all; RC = 1e-6; a = [RC 1]; b =
- 7. Коэффициент передачи clear all; clc; close all; RC = 1e-6; a = [RC 1]; b =
- 8. Функция unwrap
- 9. Импульсная характеристика (ИХ) А можно и через преобразование Лапласа: Умножению в частотной области соответствует свертка во
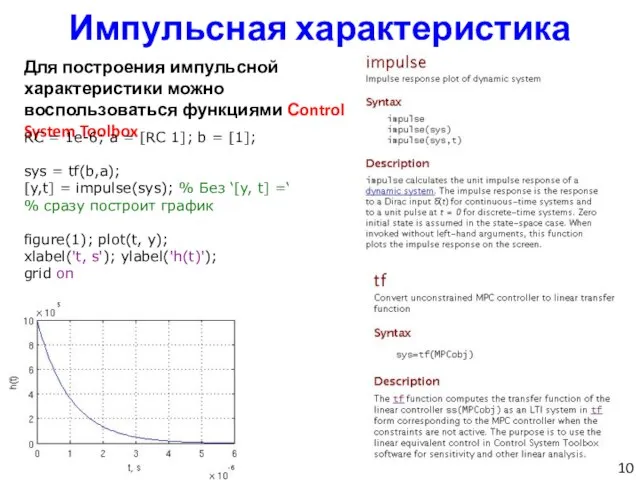
- 10. Импульсная характеристика Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox RC = 1e-6; a
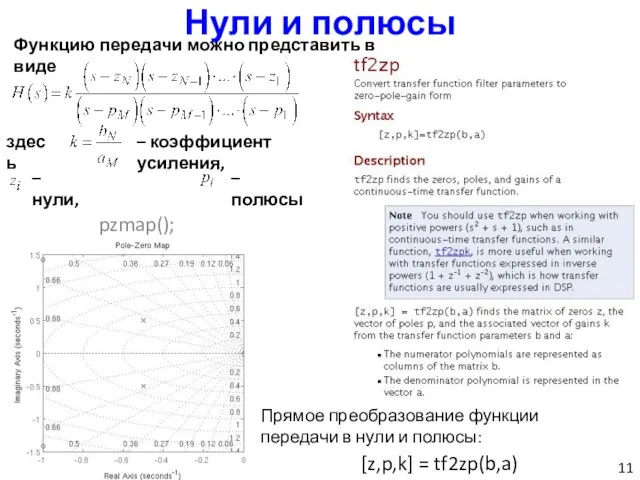
- 11. Нули и полюсы Функцию передачи можно представить в виде здесь – коэффициент усиления, – нули, –
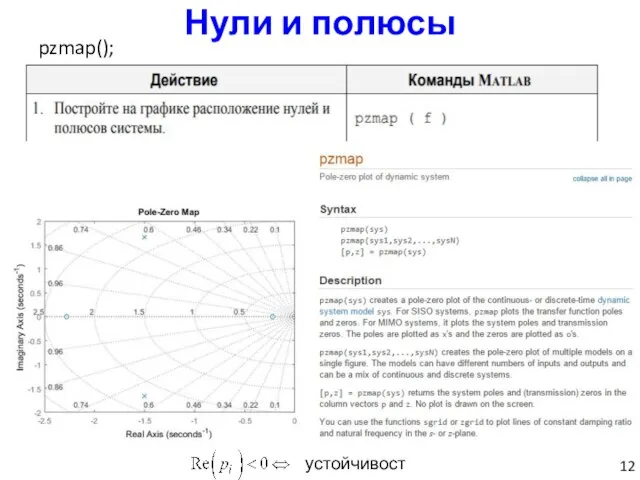
- 12. pzmap(); Нули и полюсы устойчивость
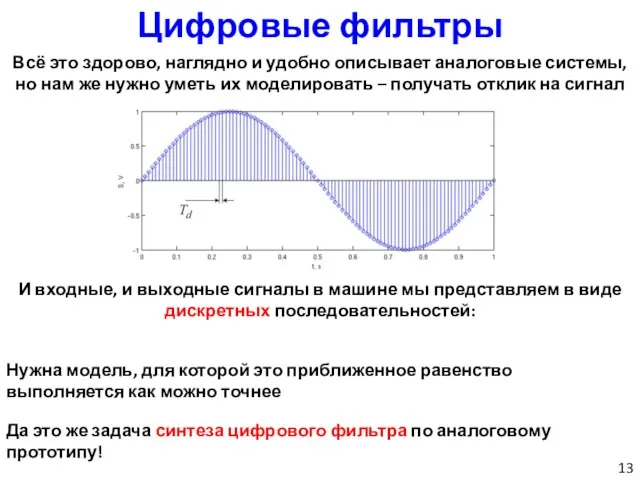
- 13. Цифровые фильтры Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам же нужно уметь
- 14. Импульсная характеристика Т.к. система линейна, то может описываться только уравнением вида: Непрерывные линейные системы характеризуются импульсной
- 15. impz(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; h = impz(b,
- 16. Transfer function Вспоминаем РЦС, z-преобразование и его свойства: Или из уравнения: Связь с преобразованием Фурье:
- 17. Transfer function clear all; close all; clc a = [-0.7]; b = [0.3]; xр = [1
- 18. freqz(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; H = freqz(b,
- 19. filter(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; x = [0
- 20. Нули и полюсы clear all; close all; clc a = [1 -0.7]; b = [0.3]; [z,
- 21. Метод билинейного преобразования Поделим на Да это же пачки интеграторов!
- 22. Метод билинейного преобразования А давайте аналоговый интегратор заменим цифровым! Интегрировать будем методом трапеций: Итого, в качестве
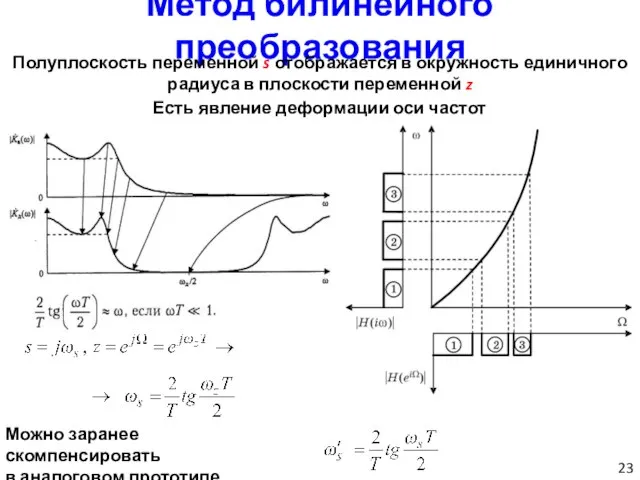
- 23. Метод билинейного преобразования Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости переменной z Есть
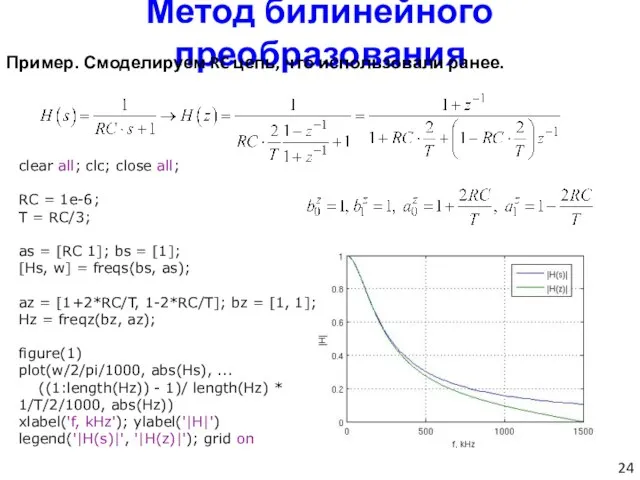
- 24. Метод билинейного преобразования Пример. Смоделируем RC цепь, что использовали ранее. clear all; clc; close all; RC
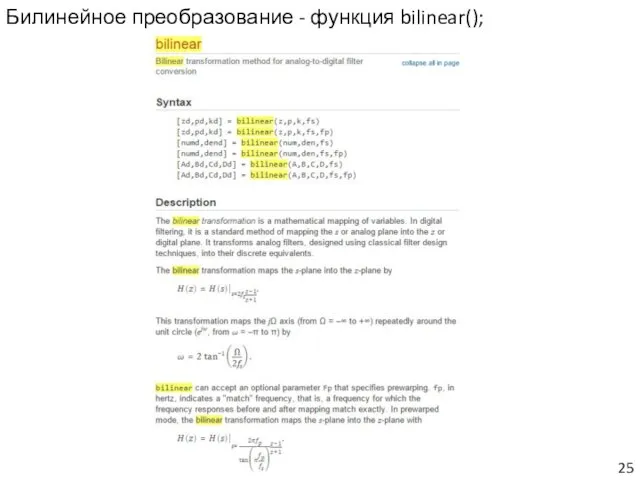
- 25. Билинейное преобразование - функция bilinear();
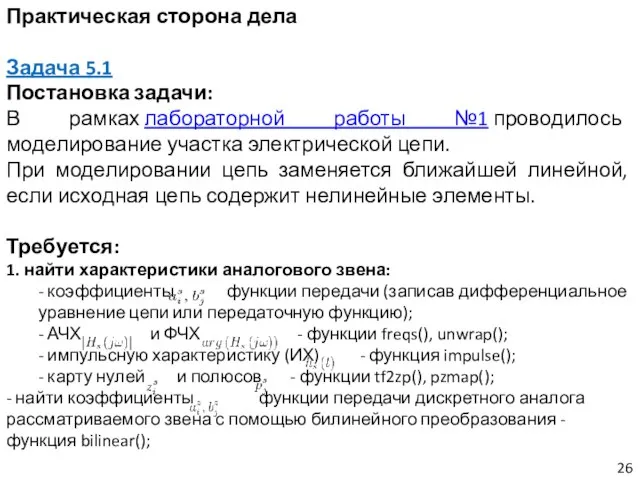
- 26. Практическая сторона дела Задача 5.1 Постановка задачи: В рамках лабораторной работы №1 проводилось моделирование участка электрической
- 27. Практическая сторона дела Задача 5.1 Постановка задачи (продолжение): Требуется: 2. найти характеристики дискретного фильтра, полученного методом
- 28. Практическая сторона дела Программа «PR5.m» clear all; clc; close all; tstart = tic(); % начало отсчета
- 29. Практическая сторона дела Продолжение программы «PR5.m» figure(2) subplot(2, 1, 1) semilogy(w/2/pi/1e6, abs(H)); xlabel('f, MHz'); ylabel('|H|') subplot(2,
- 30. Практическая сторона дела Продолжение программы «PR5.m» % Находим цифровой аналог Fs = 2 * wmax /
- 31. Практическая сторона дела Продолжение программы «PR5.m» f = 1e3; % Hz A = 1; E =
- 32. Продолжение программы «PR5.m» nf = fft(n); yf = fft(y); mn = sqrt(mean(abs(nf).^2)) * 2.5; nf =
- 33. Вывод программы: Графики АЧХ и ФЧХ аналогового звена (unwrap)
- 34. Вывод программы: График ИХ аналогового звена (impulse)
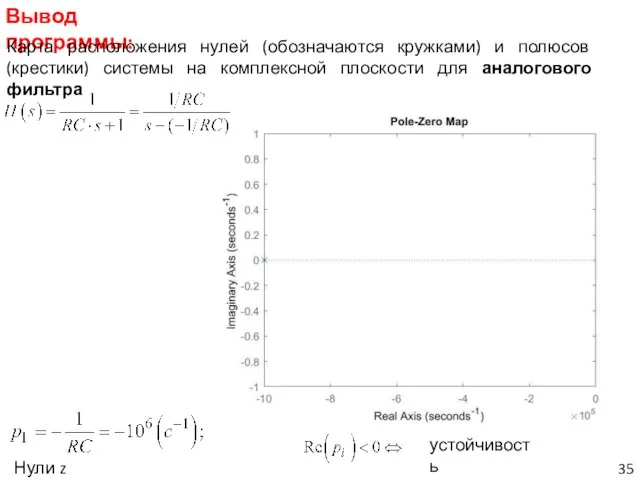
- 35. Вывод программы: Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной плоскости для аналогового
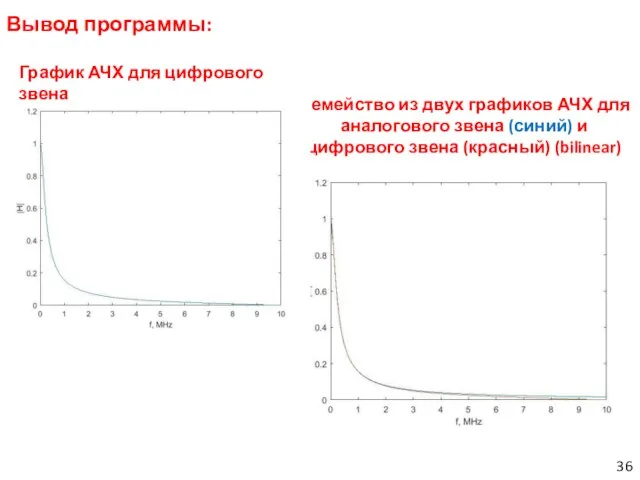
- 36. Вывод программы: Семейство из двух графиков АЧХ для аналогового звена (синий) и цифрового звена (красный) (bilinear)
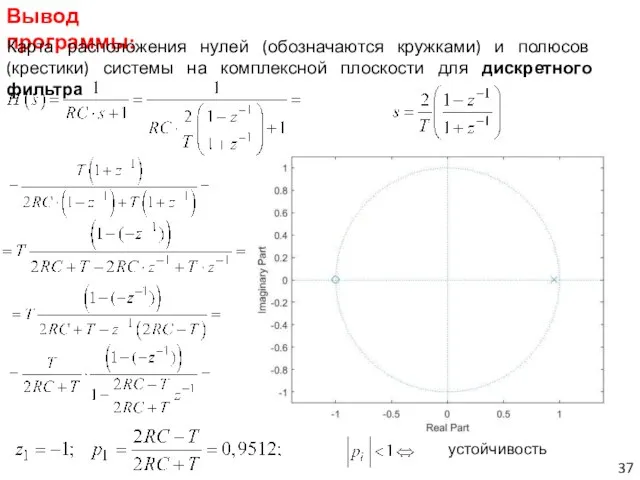
- 37. Вывод программы: Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной плоскости для дискретного
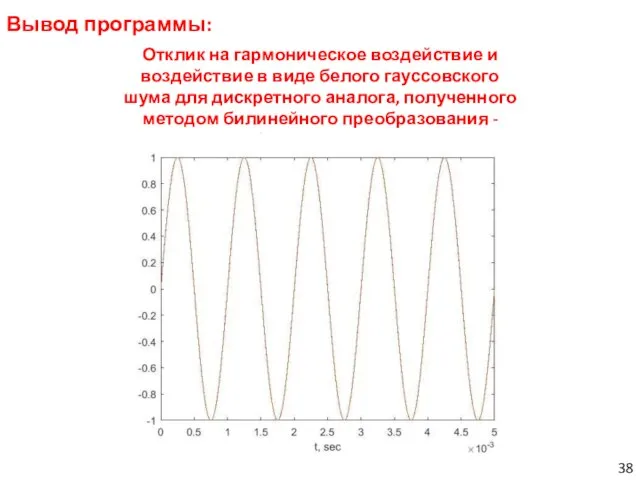
- 38. Вывод программы: Отклик на гармоническое воздействие и воздействие в виде белого гауссовского шума для дискретного аналога,
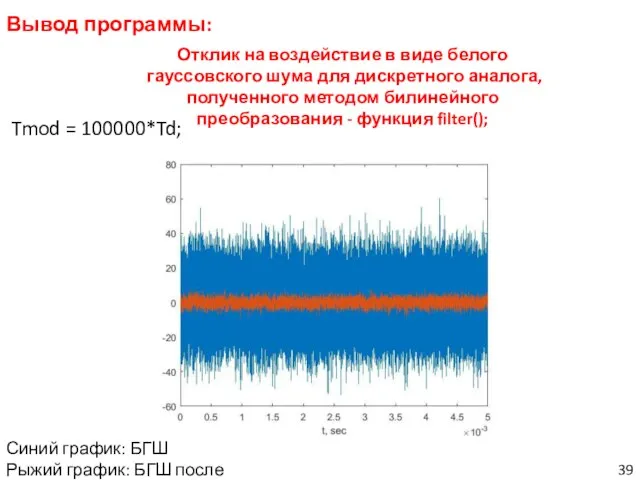
- 39. Вывод программы: Tmod = 100000*Td; Отклик на воздействие в виде белого гауссовского шума для дискретного аналога,
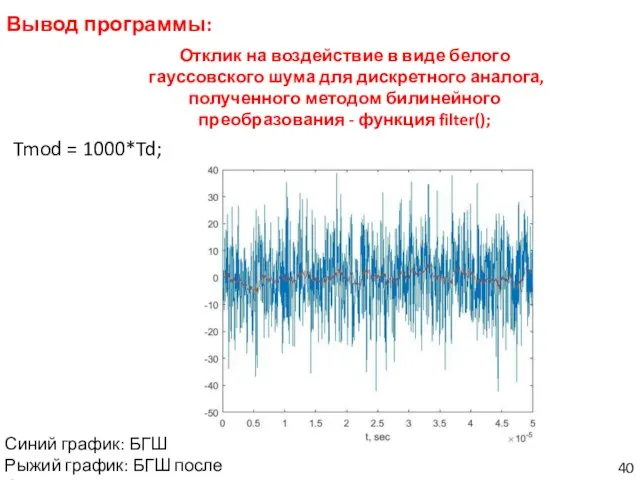
- 40. Вывод программы: Tmod = 1000*Td; Отклик на воздействие в виде белого гауссовского шума для дискретного аналога,
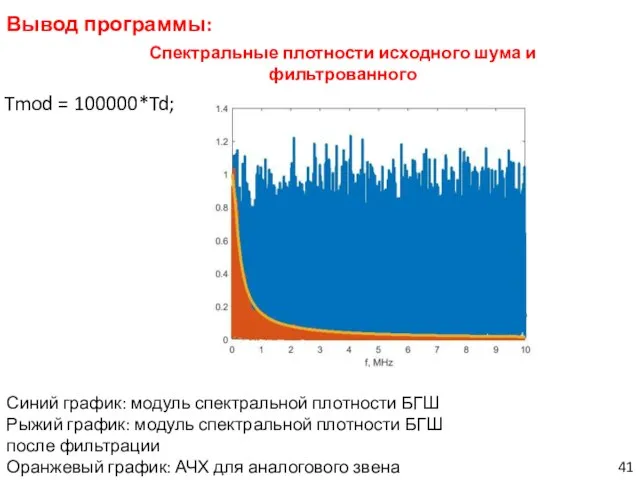
- 41. Вывод программы: Tmod = 100000*Td; Спектральные плотности исходного шума и фильтрованного Синий график: модуль спектральной плотности
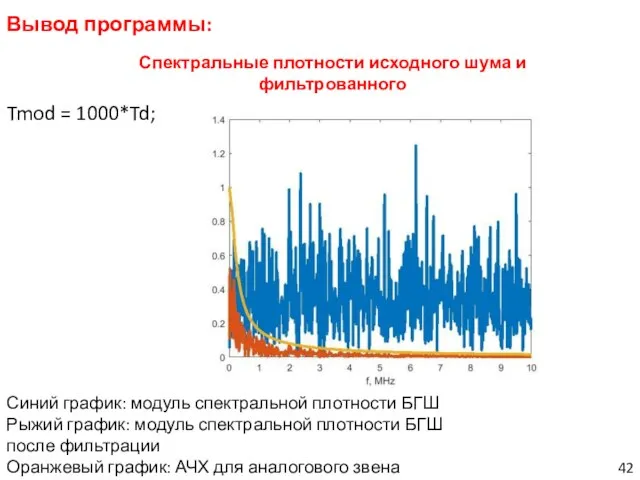
- 42. Вывод программы: Tmod = 1000*Td; Спектральные плотности исходного шума и фильтрованного Синий график: модуль спектральной плотности
- 44. Скачать презентацию
Слайд 2Тема занятия: Моделирование линейных звеньев
Цели занятия:
освоить построение основных характеристик непрерывных и дискретных линейных
Тема занятия: Моделирование линейных звеньев
Цели занятия:
освоить построение основных характеристик непрерывных и дискретных линейных
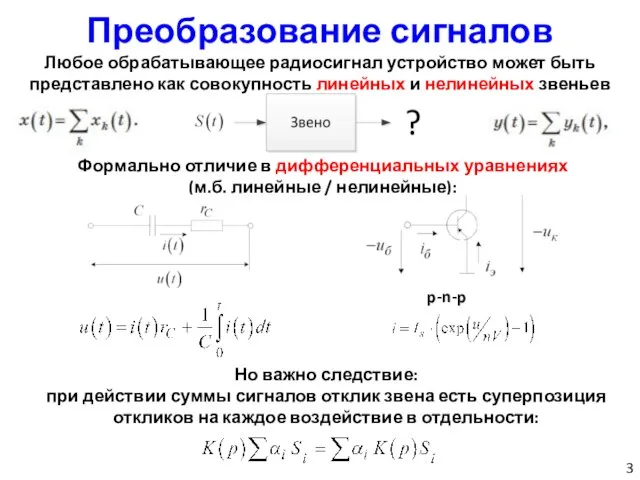
Слайд 3Преобразование сигналов
Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и
Преобразование сигналов
Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и
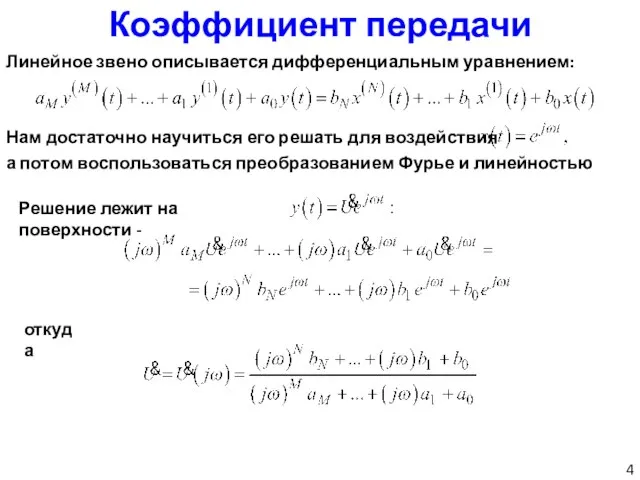
Слайд 4Коэффициент передачи
Линейное звено описывается дифференциальным уравнением:
Нам достаточно научиться его решать для воздействия
а
Коэффициент передачи
Линейное звено описывается дифференциальным уравнением:
Нам достаточно научиться его решать для воздействия
а
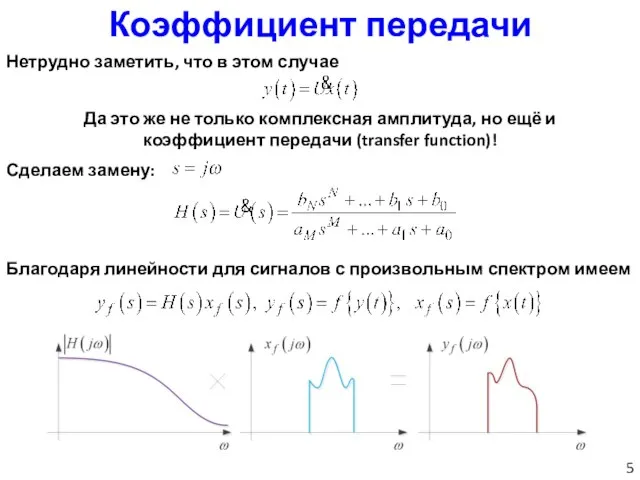
Слайд 5Коэффициент передачи
Нетрудно заметить, что в этом случае
Да это же не только комплексная
Коэффициент передачи
Нетрудно заметить, что в этом случае
Да это же не только комплексная
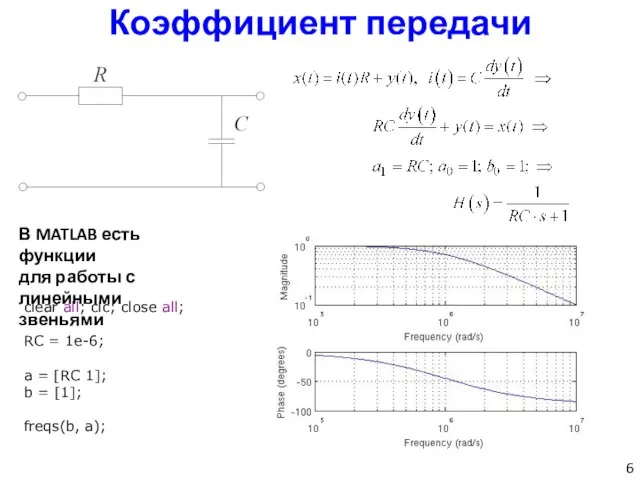
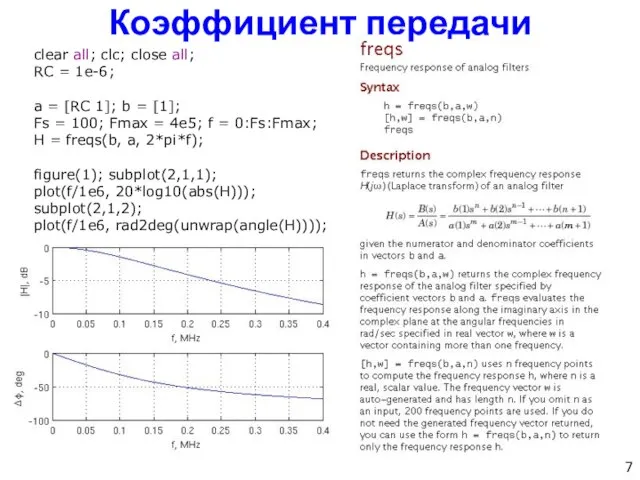
Слайд 6Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1];
b =
Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1];
b =
Слайд 7Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1]; b
Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1]; b
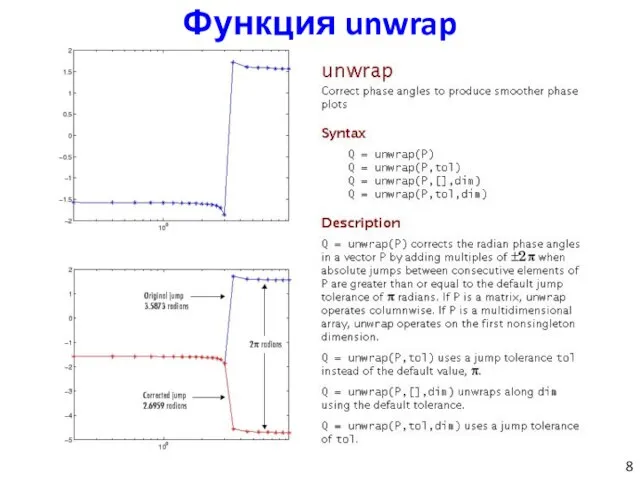
Слайд 8Функция unwrap
Функция unwrap
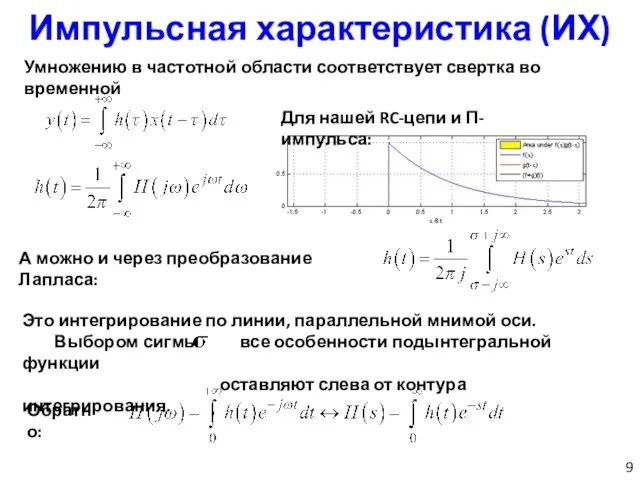
Слайд 9Импульсная характеристика (ИХ)
А можно и через преобразование Лапласа:
Умножению в частотной области соответствует
Импульсная характеристика (ИХ)
А можно и через преобразование Лапласа:
Умножению в частотной области соответствует
Слайд 10Импульсная характеристика
Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox
RC =
Импульсная характеристика
Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox
RC =
Слайд 11Нули и полюсы
Функцию передачи можно представить в виде
здесь
– коэффициент усиления,
– нули,
– полюсы
pzmap();
[z,p,k]
Нули и полюсы
Функцию передачи можно представить в виде
здесь
– коэффициент усиления,
– нули,
– полюсы
pzmap();
[z,p,k]
Слайд 12pzmap();
Нули и полюсы
устойчивость
pzmap();
Нули и полюсы
устойчивость
Слайд 13Цифровые фильтры
Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам
Цифровые фильтры
Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам
Слайд 14Импульсная характеристика
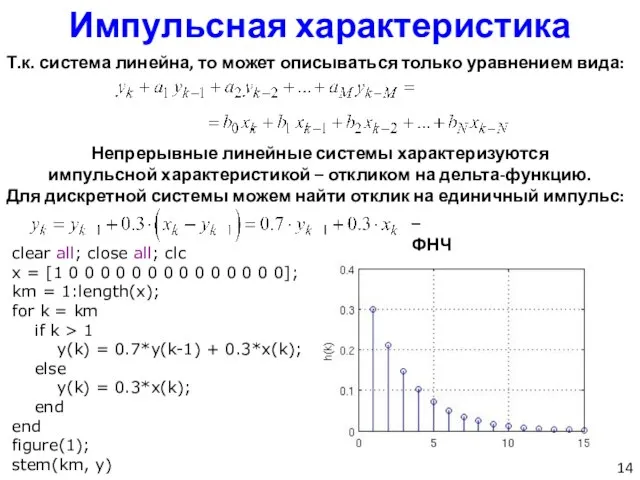
Т.к. система линейна, то может описываться только уравнением вида:
Непрерывные линейные системы
Импульсная характеристика
Т.к. система линейна, то может описываться только уравнением вида:
Непрерывные линейные системы
Слайд 15impz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
h =
impz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
h =
![impz(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/876225/slide-14.jpg)
Слайд 16Transfer function
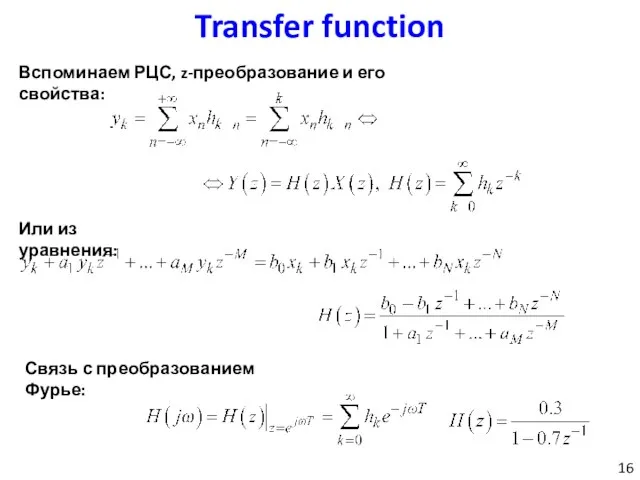
Вспоминаем РЦС, z-преобразование и его свойства:
Или из уравнения:
Связь с преобразованием Фурье:
Transfer function
Вспоминаем РЦС, z-преобразование и его свойства:
Или из уравнения:
Связь с преобразованием Фурье:
Слайд 17Transfer function
clear all; close all; clc
a = [-0.7]; b = [0.3];
xр =
Transfer function
clear all; close all; clc
a = [-0.7]; b = [0.3];
xр =
![Transfer function clear all; close all; clc a = [-0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/876225/slide-16.jpg)
Слайд 18freqz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
H =
freqz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
H =
![freqz(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/876225/slide-17.jpg)
Слайд 19filter(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
x =
filter(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
x =
![filter(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/876225/slide-18.jpg)
Слайд 20Нули и полюсы
clear all; close all; clc
a = [1 -0.7]; b =
Нули и полюсы
clear all; close all; clc
a = [1 -0.7]; b =
![Нули и полюсы clear all; close all; clc a = [1 -0.7];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/876225/slide-19.jpg)
Слайд 21Метод билинейного преобразования
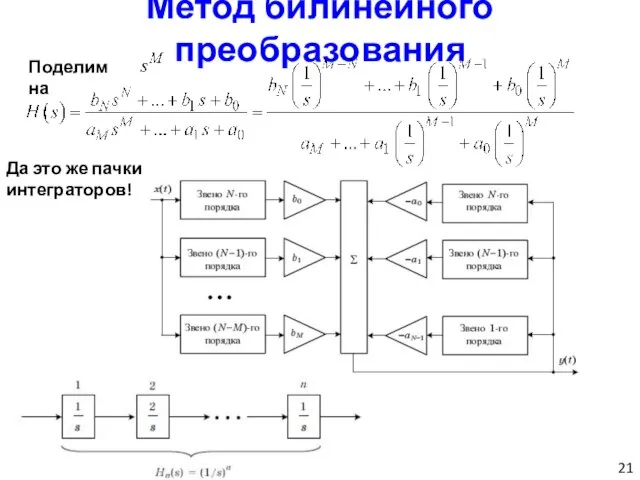
Поделим на
Да это же пачки интеграторов!
Метод билинейного преобразования
Поделим на
Да это же пачки интеграторов!
Слайд 22Метод билинейного преобразования
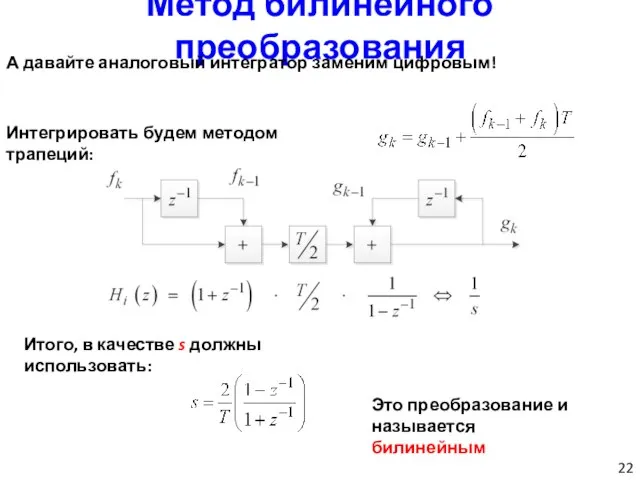
А давайте аналоговый интегратор заменим цифровым!
Интегрировать будем методом трапеций:
Итого,
Метод билинейного преобразования
А давайте аналоговый интегратор заменим цифровым!
Интегрировать будем методом трапеций:
Итого,
Слайд 23Метод билинейного преобразования
Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости
Метод билинейного преобразования
Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости
Слайд 24Метод билинейного преобразования
Пример. Смоделируем RC цепь, что использовали ранее.
clear all; clc; close
Метод билинейного преобразования
Пример. Смоделируем RC цепь, что использовали ранее.
clear all; clc; close
Слайд 25Билинейное преобразование - функция bilinear();
Билинейное преобразование - функция bilinear();
Слайд 26Практическая сторона дела
Задача 5.1
Постановка задачи:
В рамках лабораторной работы №1 проводилось моделирование участка электрической цепи.
Практическая сторона дела
Задача 5.1
Постановка задачи:
В рамках лабораторной работы №1 проводилось моделирование участка электрической цепи.
Слайд 27Практическая сторона дела
Задача 5.1
Постановка задачи (продолжение):
Требуется:
2. найти характеристики дискретного фильтра, полученного методом
Практическая сторона дела
Задача 5.1
Постановка задачи (продолжение):
Требуется:
2. найти характеристики дискретного фильтра, полученного методом
Слайд 28Практическая сторона дела
Программа «PR5.m»
clear all; clc; close all;
tstart = tic(); % начало
Практическая сторона дела
Программа «PR5.m»
clear all; clc; close all;
tstart = tic(); % начало
Слайд 29Практическая сторона дела
Продолжение программы «PR5.m»
figure(2)
subplot(2, 1, 1)
semilogy(w/2/pi/1e6, abs(H));
xlabel('f, MHz'); ylabel('|H|')
subplot(2, 1,
Практическая сторона дела
Продолжение программы «PR5.m»
figure(2)
subplot(2, 1, 1)
semilogy(w/2/pi/1e6, abs(H));
xlabel('f, MHz'); ylabel('|H|')
subplot(2, 1,
Слайд 30Практическая сторона дела
Продолжение программы «PR5.m»
% Находим цифровой аналог
Fs = 2 * wmax
Практическая сторона дела
Продолжение программы «PR5.m»
% Находим цифровой аналог
Fs = 2 * wmax
Слайд 31Практическая сторона дела
Продолжение программы «PR5.m»
f = 1e3; % Hz
A = 1;
E =
Практическая сторона дела
Продолжение программы «PR5.m»
f = 1e3; % Hz
A = 1;
E =
Слайд 32Продолжение программы «PR5.m»
nf = fft(n);
yf = fft(y);
mn = sqrt(mean(abs(nf).^2)) * 2.5;
nf =
Продолжение программы «PR5.m»
nf = fft(n);
yf = fft(y);
mn = sqrt(mean(abs(nf).^2)) * 2.5;
nf =
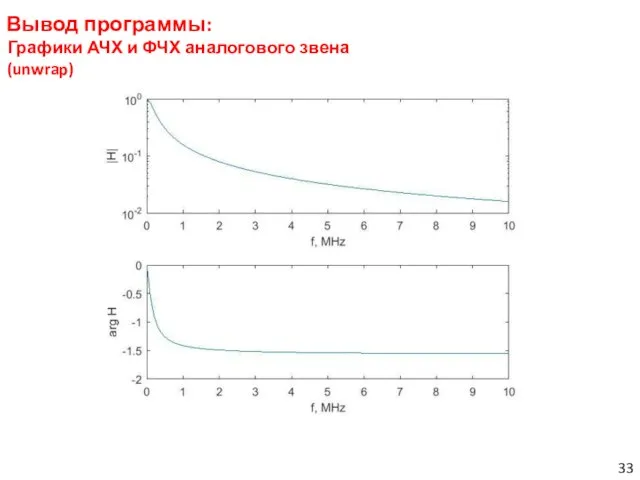
Слайд 33Вывод программы:
Графики АЧХ и ФЧХ аналогового звена (unwrap)
Вывод программы:
Графики АЧХ и ФЧХ аналогового звена (unwrap)
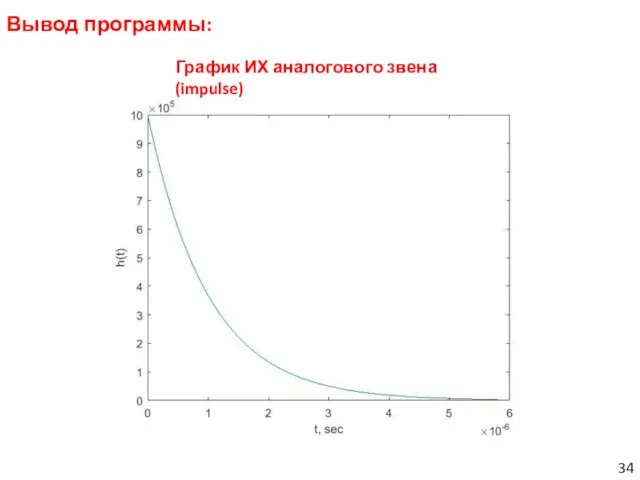
Слайд 34Вывод программы:
График ИХ аналогового звена (impulse)
Вывод программы:
График ИХ аналогового звена (impulse)
Слайд 35Вывод программы:
Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной
Вывод программы:
Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной
Слайд 36Вывод программы:
Семейство из двух графиков АЧХ для аналогового звена (синий) и цифрового
Вывод программы:
Семейство из двух графиков АЧХ для аналогового звена (синий) и цифрового
Слайд 37Вывод программы:
Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной
Вывод программы:
Карта расположения нулей (обозначаются кружками) и полюсов (крестики) системы на комплексной
Слайд 38Вывод программы:
Отклик на гармоническое воздействие и воздействие в виде белого гауссовского шума
Вывод программы:
Отклик на гармоническое воздействие и воздействие в виде белого гауссовского шума
Слайд 39Вывод программы:
Tmod = 100000*Td;
Отклик на воздействие в виде белого гауссовского шума для
Вывод программы:
Tmod = 100000*Td;
Отклик на воздействие в виде белого гауссовского шума для
Слайд 40Вывод программы:
Tmod = 1000*Td;
Отклик на воздействие в виде белого гауссовского шума для
Вывод программы:
Tmod = 1000*Td;
Отклик на воздействие в виде белого гауссовского шума для
Слайд 41Вывод программы:
Tmod = 100000*Td;
Спектральные плотности исходного шума и фильтрованного
Синий график: модуль спектральной
Вывод программы:
Tmod = 100000*Td;
Спектральные плотности исходного шума и фильтрованного
Синий график: модуль спектральной
Слайд 42Вывод программы:
Tmod = 1000*Td;
Спектральные плотности исходного шума и фильтрованного
Синий график: модуль спектральной
Вывод программы:
Tmod = 1000*Td;
Спектральные плотности исходного шума и фильтрованного
Синий график: модуль спектральной
 Computer system architecture
Computer system architecture Средства ориентации в зданиях
Средства ориентации в зданиях Вычислительные системы и сети
Вычислительные системы и сети Информационная безопасность. Урок №2
Информационная безопасность. Урок №2 История вычислительных сетей Автор Skyfury Sparkle
История вычислительных сетей Автор Skyfury Sparkle Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Открытая галерея закрытых городов в живых историях
Открытая галерея закрытых городов в живых историях Smart City Neom
Smart City Neom 7 ways intelligent itsm can help you - storyboard
7 ways intelligent itsm can help you - storyboard Миграция для Notes в Exchange
Миграция для Notes в Exchange Дистанционная коммуникация
Дистанционная коммуникация Позиционные системы счисления
Позиционные системы счисления Основы работы с информацией. Часть 2. Тема 1.2
Основы работы с информацией. Часть 2. Тема 1.2 Электронные таблицы
Электронные таблицы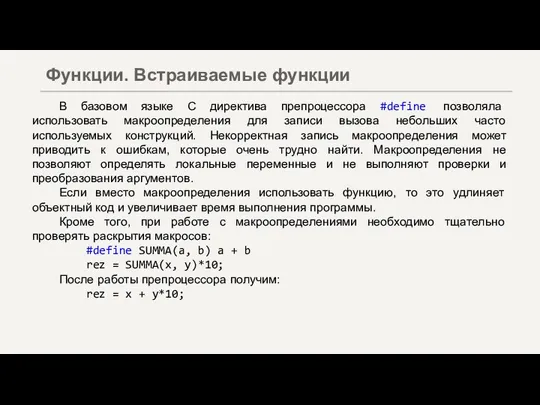 Лекция 2
Лекция 2 Интернешка лабиринты. Интерактивная игра
Интернешка лабиринты. Интерактивная игра Программирование в Visual C++
Программирование в Visual C++ Современные технологии
Современные технологии 3D модели
3D модели Телекоммуникационные сети. Сетевой трафик
Телекоммуникационные сети. Сетевой трафик Анимация объектов. Microsoft PowerPoint
Анимация объектов. Microsoft PowerPoint Информационные технологии. Тема 1.3
Информационные технологии. Тема 1.3 11u-2_Моделирование
11u-2_Моделирование Smartnet 24. Продвижение товаров и услуг в интернете
Smartnet 24. Продвижение товаров и услуг в интернете Web-программирование. Основы Node.js
Web-программирование. Основы Node.js Современный дизайн. Место дизайна в современном мире. Тренды в графическом дизайне 2021 г
Современный дизайн. Место дизайна в современном мире. Тренды в графическом дизайне 2021 г Системы счисления
Системы счисления Линейные списки
Линейные списки