ВКР: Использование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- ВКР: Использование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором

Содержание
- 2. Актуальность Интеллектуальные системы принятия решений в реальном времени Решение прикладных задач Относительно быстрая адаптация к неизвестным
- 3. Постановка задачи Цель: Перемещение схвата манипулятора в заданную точку рабочей зоны. Перемещение скользящих по поверхности объектов
- 4. Перечень подлежащих разработке вопросов Выбор инструментария для реализации методов машинного обучения Анализ и выбор алгоритмов обучения,
- 5. Инструментарий для исследований обучения с подкреплением Gym Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
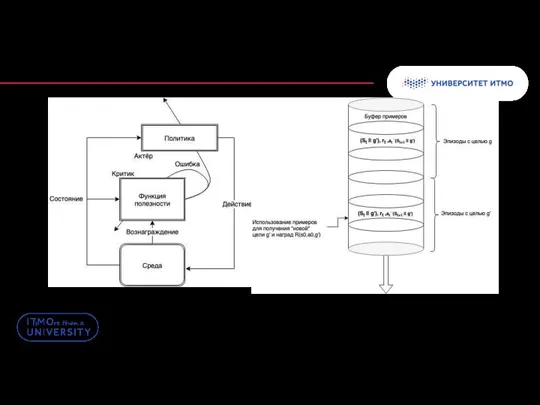
- 6. Обучение с подкреплением. Q-обучение Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- 7. Алгоритмы Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором DDPG HER
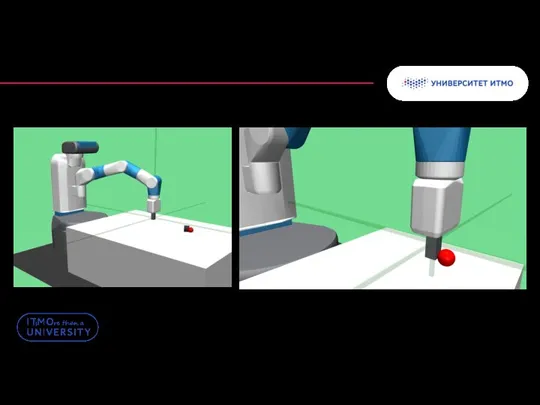
- 8. Среда окружения Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором FetchSlide-v1 FetchReach-v1
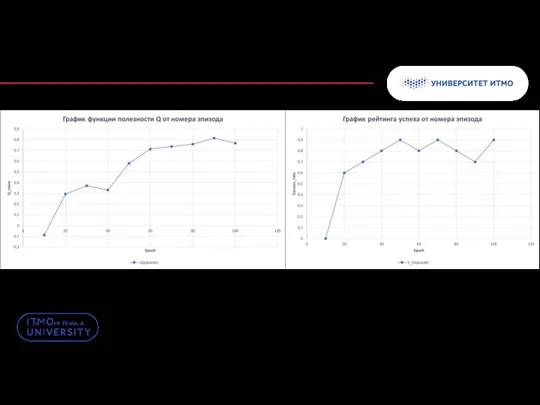
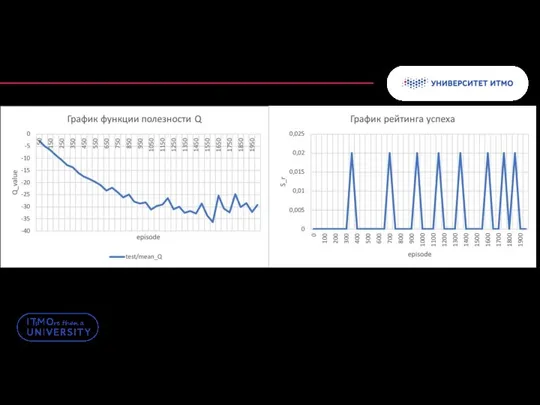
- 9. Вывод и анализ данных Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- 10. Вывод и анализ данных Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- 11. Вывод и анализ данных Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- 12. Вывод и анализ данных Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
- 14. Скачать презентацию
Слайд 2Актуальность
Интеллектуальные системы принятия решений в реальном времени
Решение прикладных задач
Относительно быстрая адаптация
Актуальность
Интеллектуальные системы принятия решений в реальном времени
Решение прикладных задач
Относительно быстрая адаптация
Слайд 3Постановка задачи
Цель: Перемещение схвата манипулятора в заданную точку рабочей зоны. Перемещение скользящих
Постановка задачи
Цель: Перемещение схвата манипулятора в заданную точку рабочей зоны. Перемещение скользящих
Слайд 4Перечень подлежащих разработке вопросов
Выбор инструментария для реализации методов машинного обучения
Анализ и выбор
Перечень подлежащих разработке вопросов
Выбор инструментария для реализации методов машинного обучения
Анализ и выбор
Слайд 5Инструментарий для исследований обучения с подкреплением Gym
Исхаков М.Р. Исспользование метода машинного обучения
Инструментарий для исследований обучения с подкреплением Gym
Исхаков М.Р. Исспользование метода машинного обучения

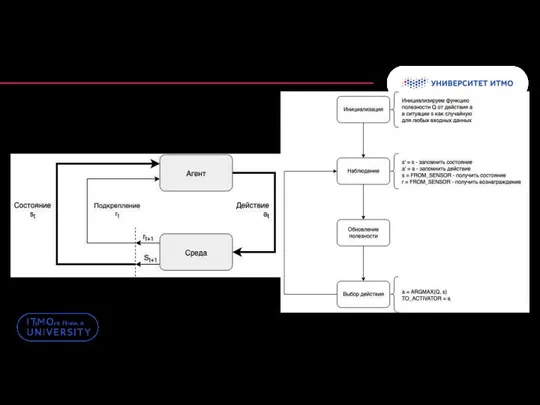
Слайд 6Обучение с подкреплением. Q-обучение
Исхаков М.Р. Исспользование метода машинного обучения на основе
Обучение с подкреплением. Q-обучение
Исхаков М.Р. Исспользование метода машинного обучения на основе
Слайд 7Алгоритмы
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
DDPG
HER
Алгоритмы
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления роботом-манипулятором
DDPG
HER
Слайд 8Среда окружения
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления
Среда окружения
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения для управления
Слайд 9Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Слайд 10Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
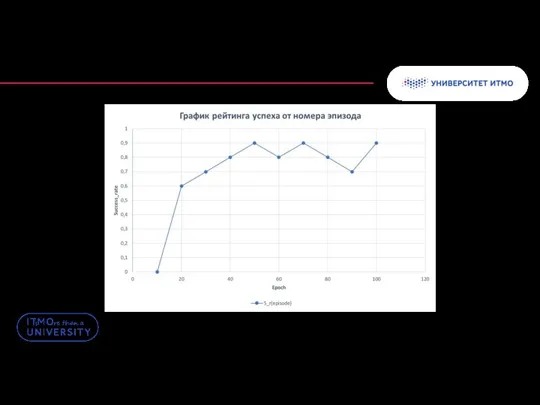
Слайд 11Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Слайд 12Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения
Вывод и анализ данных
Исхаков М.Р. Исспользование метода машинного обучения на основе Q-обучения

 Редактор формул
Редактор формул Аватар, Властелин колец, Прибытие: как создавались искусственные языки?
Аватар, Властелин колец, Прибытие: как создавались искусственные языки? Информационные системы
Информационные системы Организация и настройка глобальных компьютерных сетей
Организация и настройка глобальных компьютерных сетей Ральф Винтон Лайон Хартли
Ральф Винтон Лайон Хартли Bakshaev
Bakshaev Использование и создание медиатекста
Использование и создание медиатекста Программирование циклических алгоритмов
Программирование циклических алгоритмов Многопоточность, асинхроность
Многопоточность, асинхроность Портфолио Войтович Анны
Портфолио Войтович Анны Проектирование информационной системы риелторского агентства
Проектирование информационной системы риелторского агентства Основы программирования на языке Python
Основы программирования на языке Python Алгоритмы. Понятие алгоритма
Алгоритмы. Понятие алгоритма Test questions
Test questions Занятие Школы Медиа
Занятие Школы Медиа Утечка. Защита информации
Утечка. Защита информации влекательные игры по сенсорному развитию с использованием интерактивного оборудования для детей младшего дошкольного возраста
влекательные игры по сенсорному развитию с использованием интерактивного оборудования для детей младшего дошкольного возраста Контекстная реклама
Контекстная реклама Искусственный интеллект и его достижения
Искусственный интеллект и его достижения Вытынанки – увлекательное рукоделие
Вытынанки – увлекательное рукоделие Мастерская
Мастерская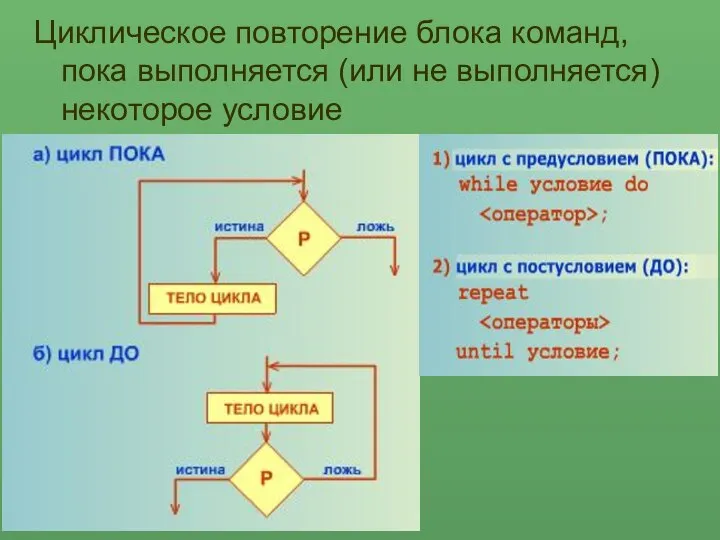 Циклическое повторение блока команд, пока выполняется (или не выполняется) некоторое условие
Циклическое повторение блока команд, пока выполняется (или не выполняется) некоторое условие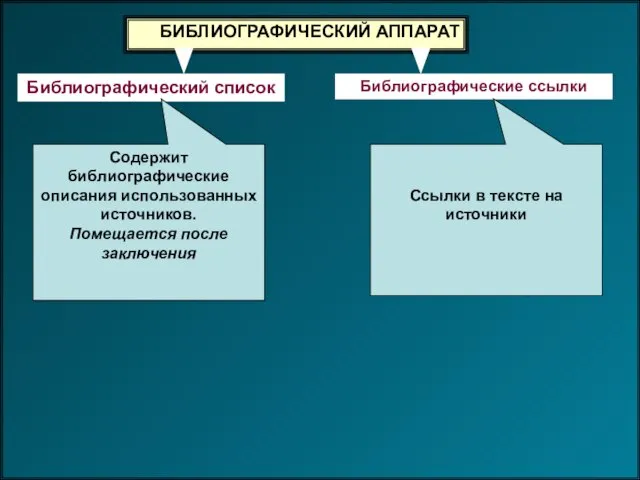 Библиографический аппарат
Библиографический аппарат Презентация на тему Урок Photoshop
Презентация на тему Урок Photoshop  Архитектура персонального компьютера
Архитектура персонального компьютера Подача заявления для участия в дистанционном электронном голосовании на выборах в органы государственной власти
Подача заявления для участия в дистанционном электронном голосовании на выборах в органы государственной власти Piece Weight Determination (PWD) Program – Stage 2. Commercial Information Pack
Piece Weight Determination (PWD) Program – Stage 2. Commercial Information Pack FreeJam icon. Иконки
FreeJam icon. Иконки