- Встроенные Системы Управления

Содержание
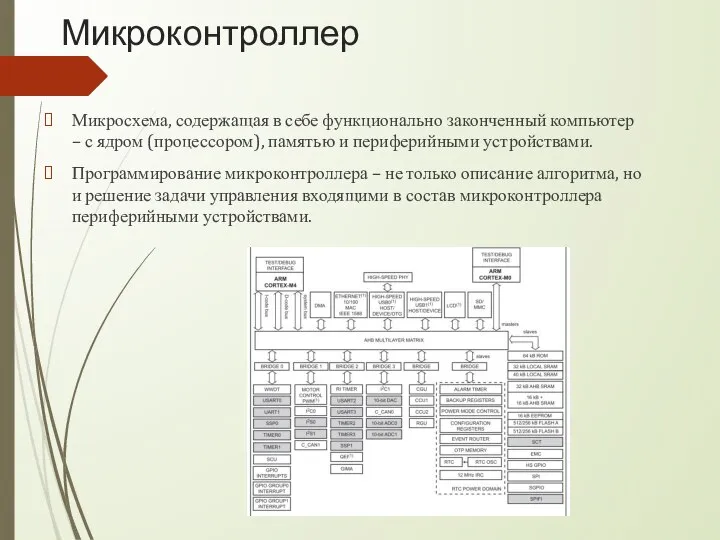
- 2. Микроконтроллер Микросхема, содержащая в себе функционально законченный компьютер – с ядром (процессором), памятью и периферийными устройствами.
- 3. Для обработки информации и принятия решений, необходимо: Превратить входную информацию в данные, пригодные для хранения в
- 4. Программа Алгоритм Типы и структуры данных Интерфейс с внешним миром
- 5. Элементы алгоритмов Следование. Последовательность действий, выполняющихся друг за другом. Условие. Точка принятия решения, после которой выполнение
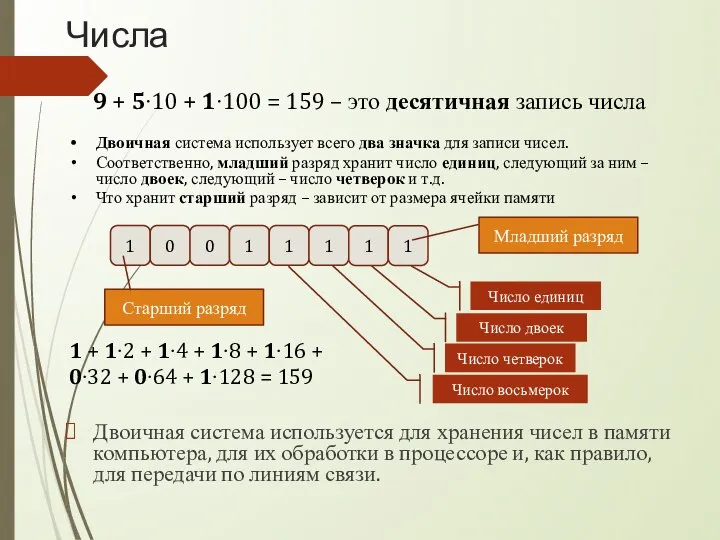
- 6. Числа Двоичная система используется для хранения чисел в памяти компьютера, для их обработки в процессоре и,
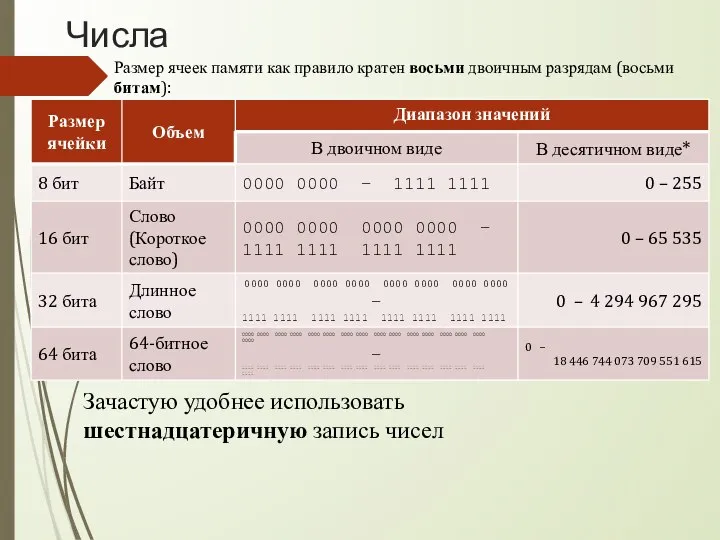
- 7. Числа Размер ячеек памяти как правило кратен восьми двоичным разрядам (восьми битам): Зачастую удобнее использовать шестнадцатеричную
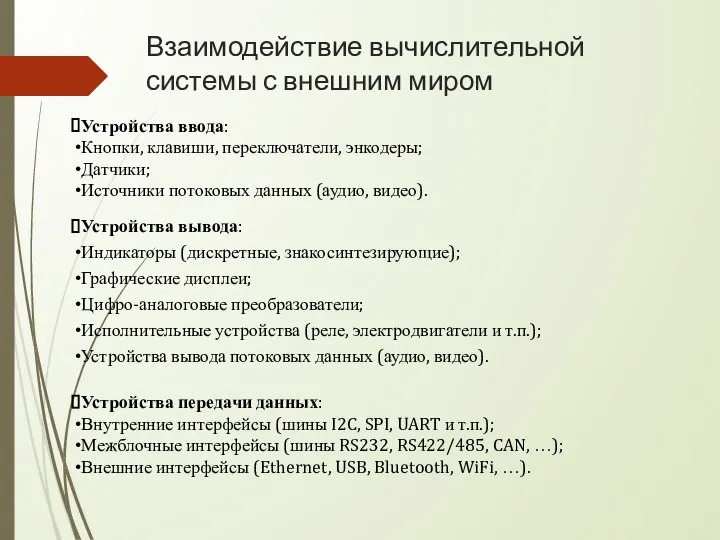
- 8. Взаимодействие вычислительной системы с внешним миром Устройства ввода: Кнопки, клавиши, переключатели, энкодеры; Датчики; Источники потоковых данных
- 9. Взаимодействие вычислительной системы с внешним миром Все внешние устройства, как правило, представлены для ядра в виде
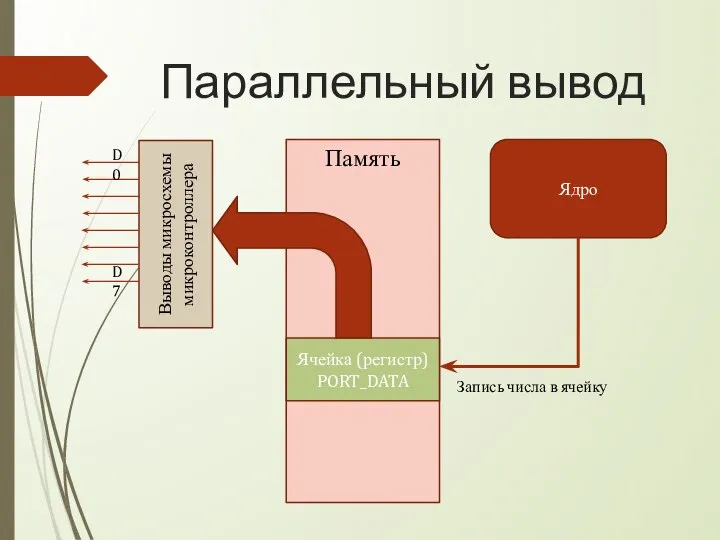
- 10. Параллельный вывод Память Ячейка (регистр) PORT_DATA Выводы микросхемы микроконтроллера Ядро D0 D7 Запись числа в ячейку
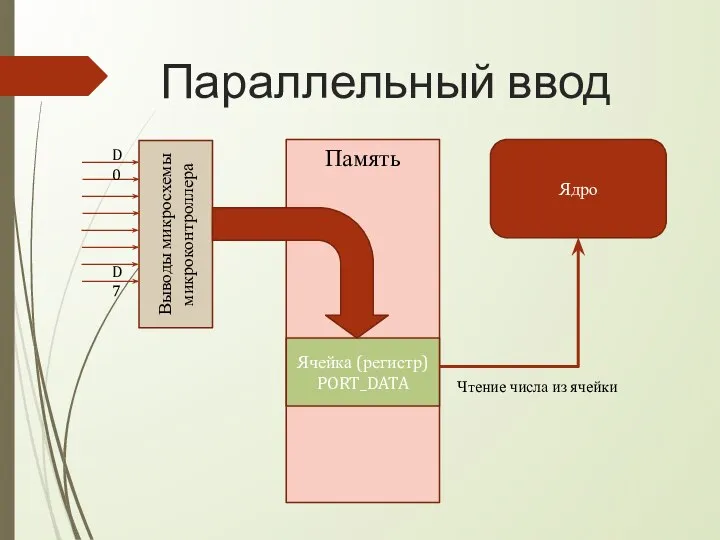
- 11. Параллельный ввод Память Ячейка (регистр) PORT_DATA Выводы микросхемы микроконтроллера Ядро D0 D7 Чтение числа из ячейки
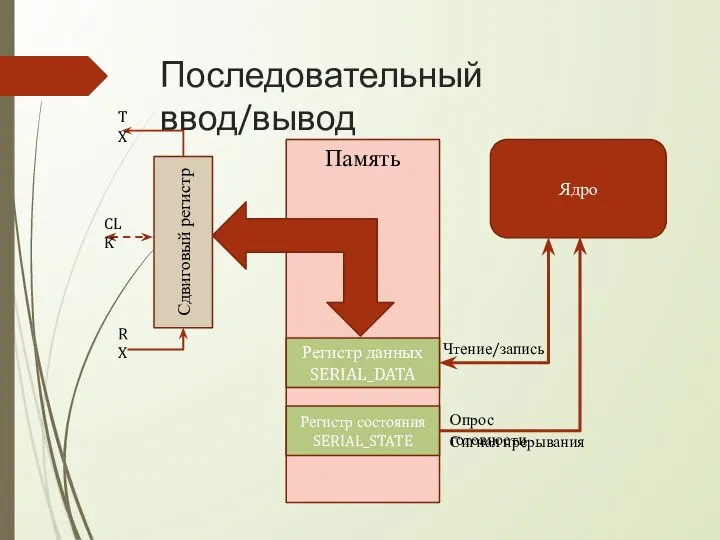
- 12. Последовательный ввод/вывод Память Регистр данных SERIAL_DATA Сдвиговый регистр Ядро RX Опрос готовности Регистр состояния SERIAL_STATE Чтение/запись
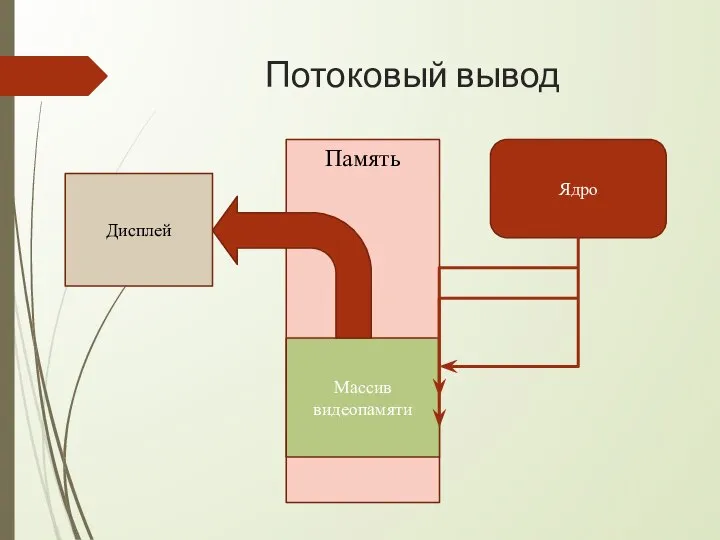
- 13. Потоковый вывод Память Массив видеопамяти Дисплей Ядро
- 14. Язык Си Программа на языке Си представляет собой набор текстовых файлов (в простейшем случае – один
- 15. Переменные Переменная – это область в памяти компьютера, которая имеет имя и хранит некоторое значение. Значение
- 16. Объявление переменных Объявление переменной – это описание переменной, которая в дальнейшем будет использоваться в программе. Переменная
- 17. Объявление переменной Синтаксис оператора объявления: имя_типа имя_переменной; Тип переменной определяет, какие данные в ней хранятся В
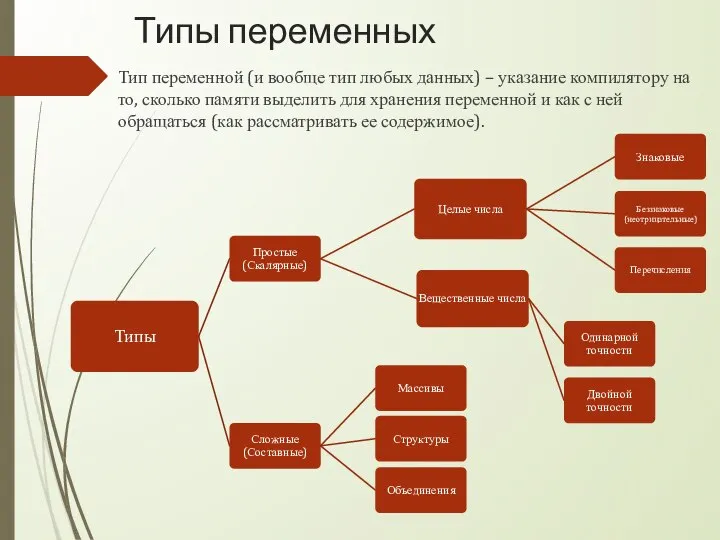
- 18. Типы переменных Тип переменной (и вообще тип любых данных) – указание компилятору на то, сколько памяти
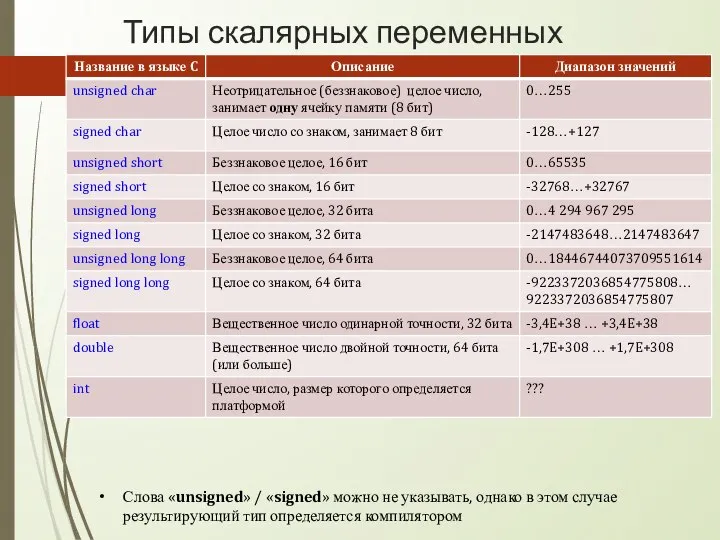
- 19. Типы скалярных переменных Слова «unsigned» / «signed» можно не указывать, однако в этом случае результирующий тип
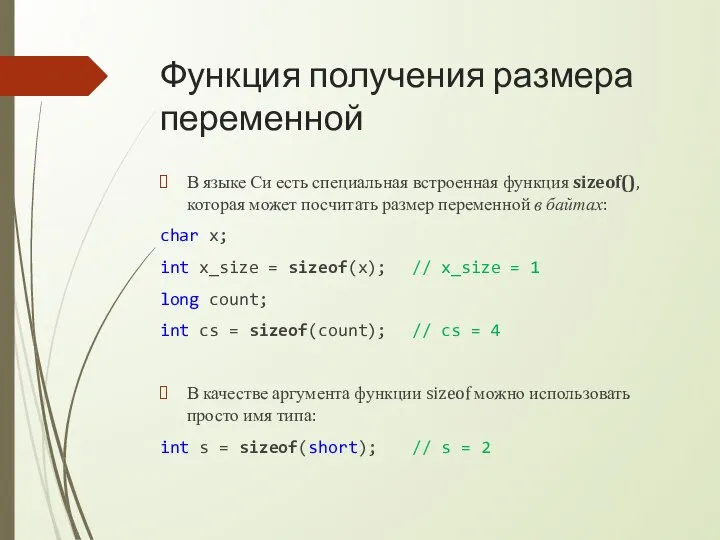
- 20. Функция получения размера переменной В языке Си есть специальная встроенная функция sizeof(), которая может посчитать размер
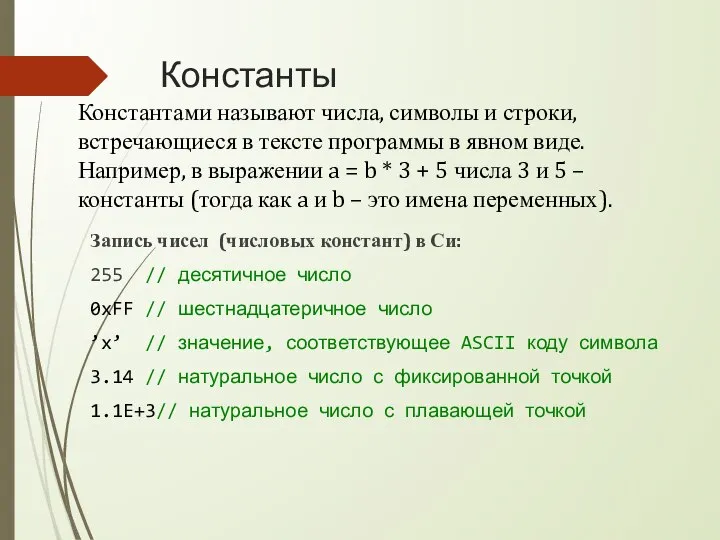
- 21. Константы Запись чисел (числовых констант) в Си: 255 // десятичное число 0xFF // шестнадцатеричное число ’x’
- 22. Оператор присваивания Присваивание – это запись значения в переменную Result = 1; Average = (a +
- 23. Переменные – регистры управления Все периферийные устройства микроконтроллера управляются при помощи набора регистров, находящихся в общем
- 24. Переменные – регистры управления Например, в микроконтроллере LPC2368 состояние порта ввода-вывода управляется регистрами FIOnPIN, где n
- 25. Выражения в языке C Везде, где согласно правилу написания того или иного оператора требуется присутствие того
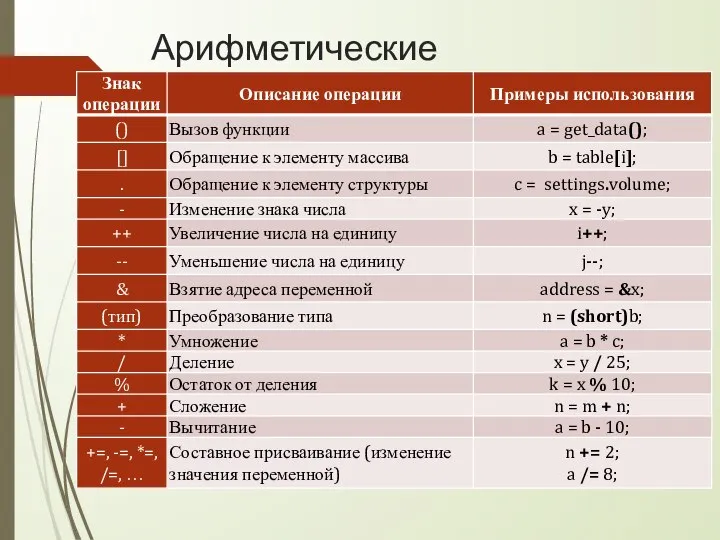
- 26. Арифметические операции
- 27. Сложные типы данных Сложные типы состоят из нескольких простых (скалярных) типов. Сложные типы в Си –
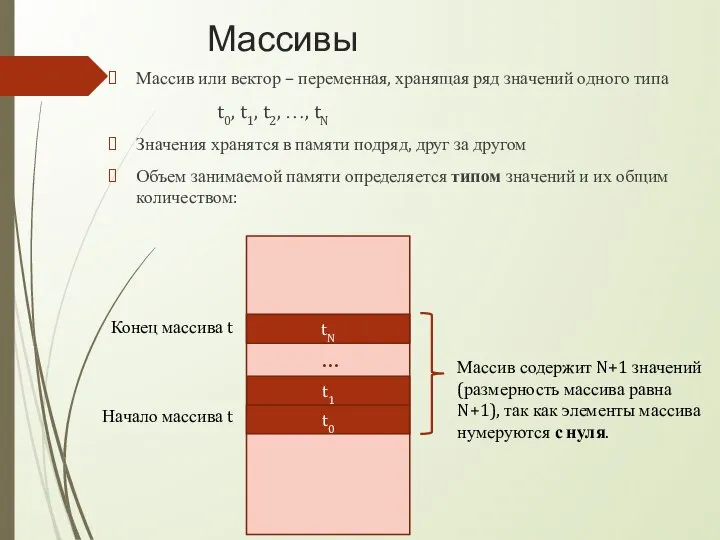
- 28. Массивы Массив или вектор – переменная, хранящая ряд значений одного типа t0, t1, t2, …, tN
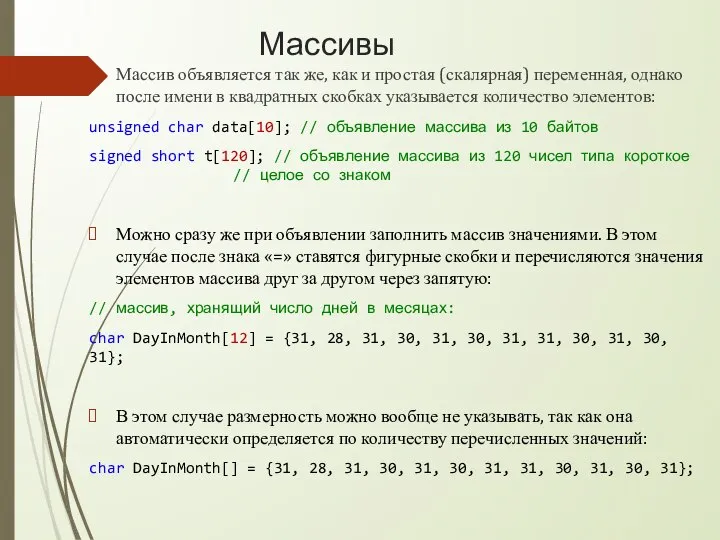
- 29. Массивы Массив объявляется так же, как и простая (скалярная) переменная, однако после имени в квадратных скобках
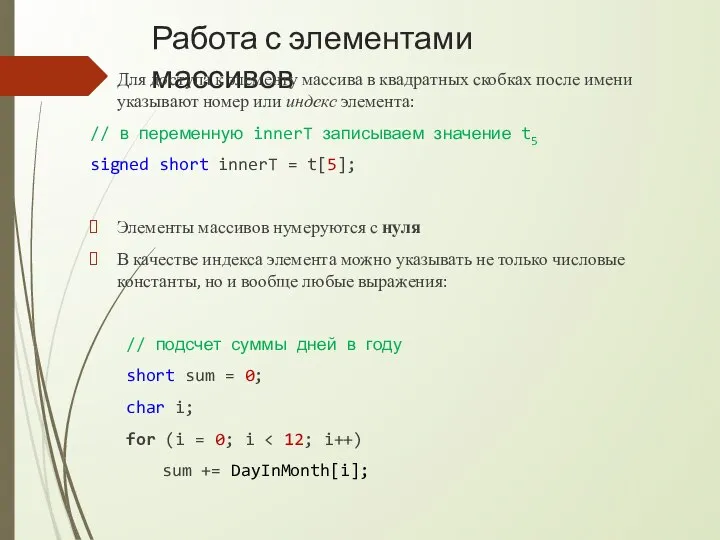
- 30. Работа с элементами массивов Для доступа к элементу массива в квадратных скобках после имени указывают номер
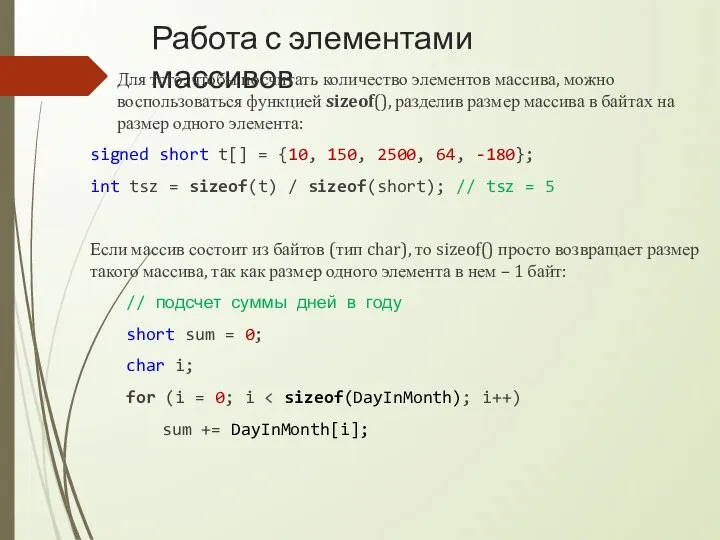
- 31. Работа с элементами массивов Для того, чтобы посчитать количество элементов массива, можно воспользоваться функцией sizeof(), разделив
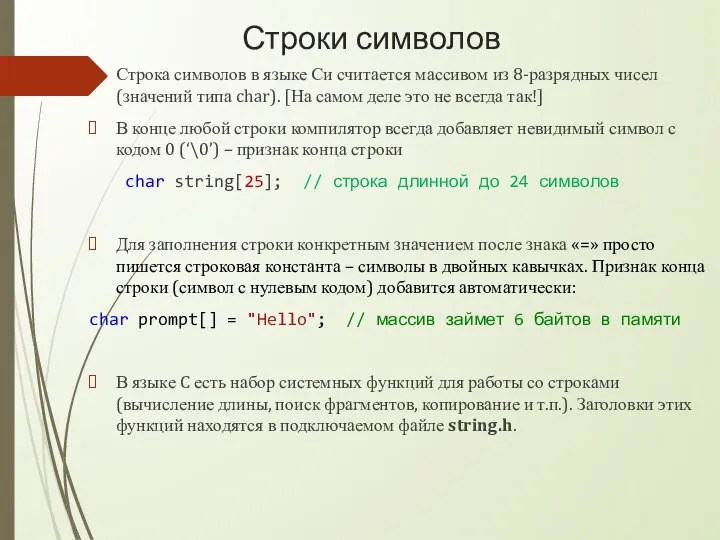
- 32. Строки символов Строка символов в языке Си считается массивом из 8-разрядных чисел (значений типа char). [На
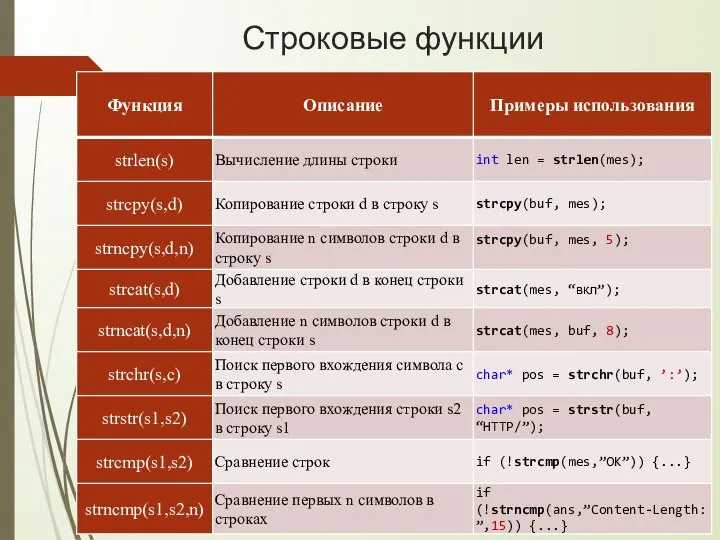
- 33. Строковые функции
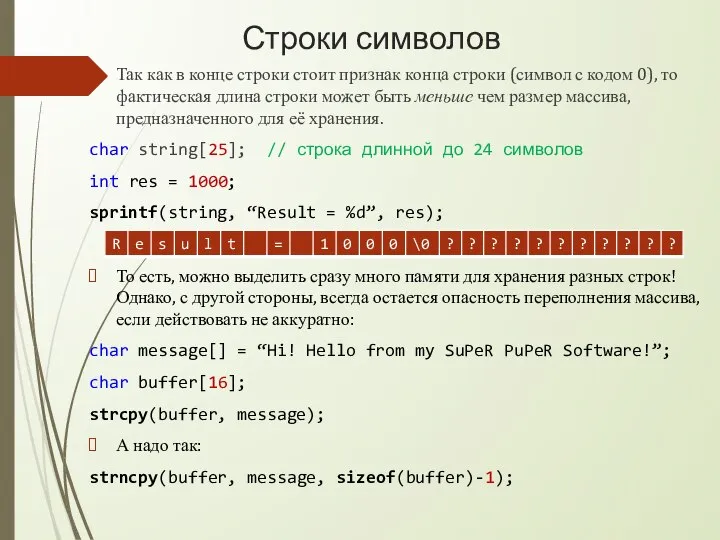
- 34. Строки символов Так как в конце строки стоит признак конца строки (символ с кодом 0), то
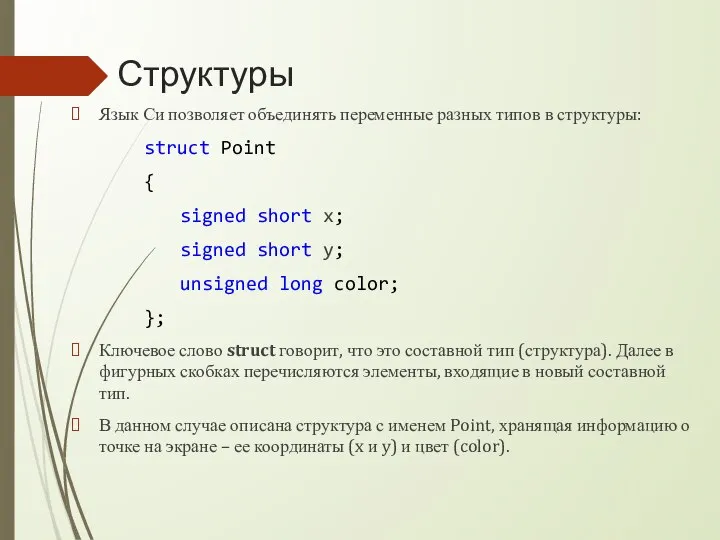
- 35. Структуры Язык Си позволяет объединять переменные разных типов в структуры: struct Point { signed short x;
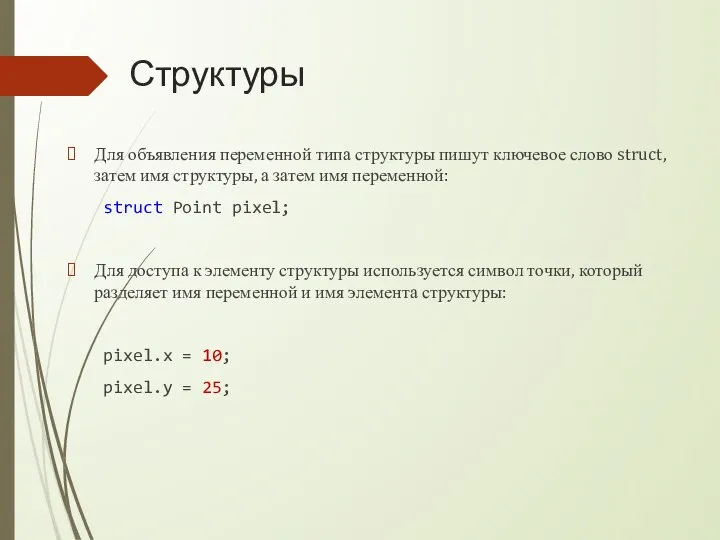
- 36. Структуры Для объявления переменной типа структуры пишут ключевое слово struct, затем имя структуры, а затем имя
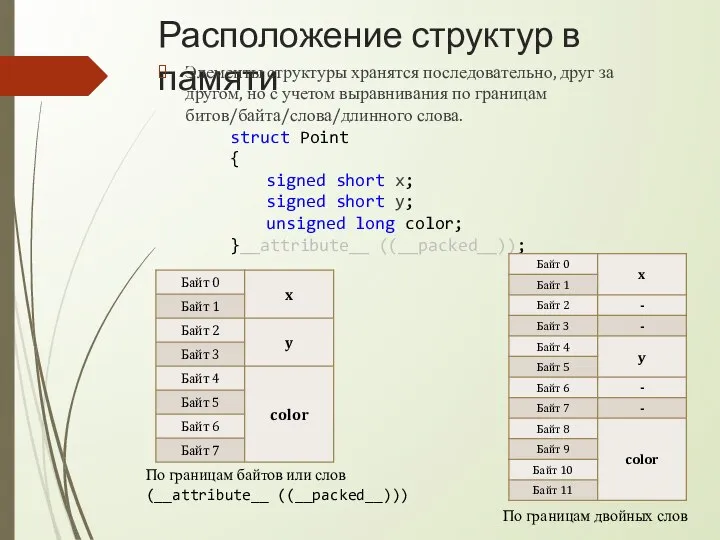
- 37. Расположение структур в памяти Элементы структуры хранятся последовательно, друг за другом, но с учетом выравнивания по
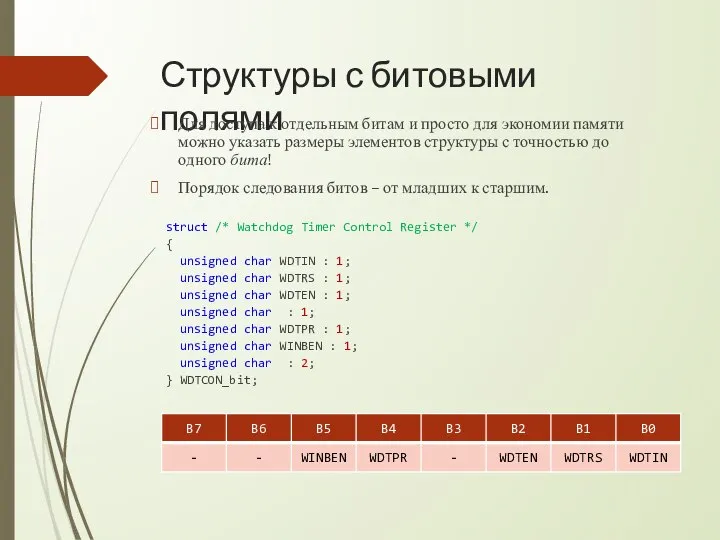
- 38. Структуры с битовыми полями Для доступа к отдельным битам и просто для экономии памяти можно указать
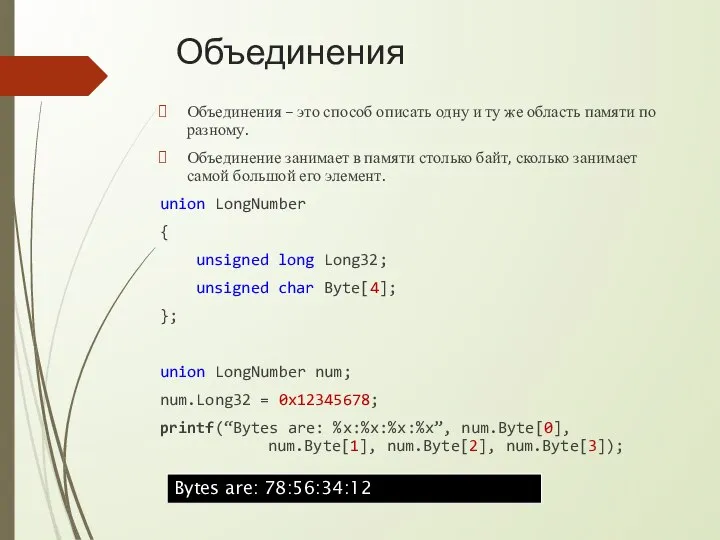
- 39. Объединения Объединения – это способ описать одну и ту же область памяти по разному. Объединение занимает
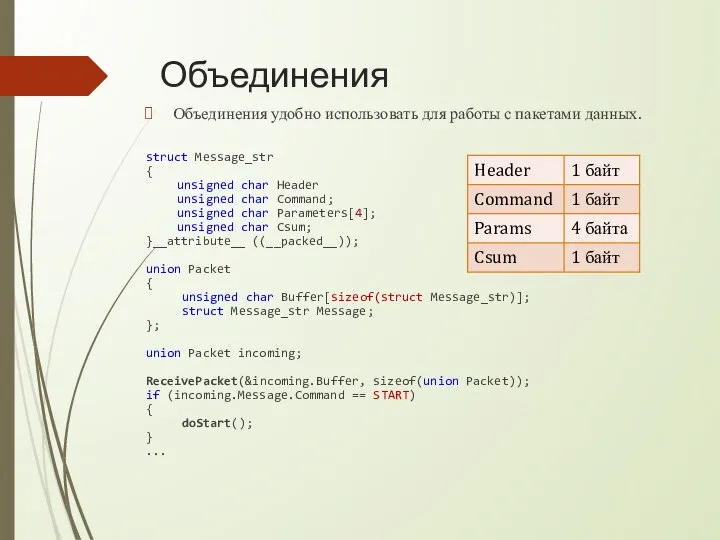
- 40. Объединения Объединения удобно использовать для работы с пакетами данных. struct Message_str { unsigned char Header unsigned
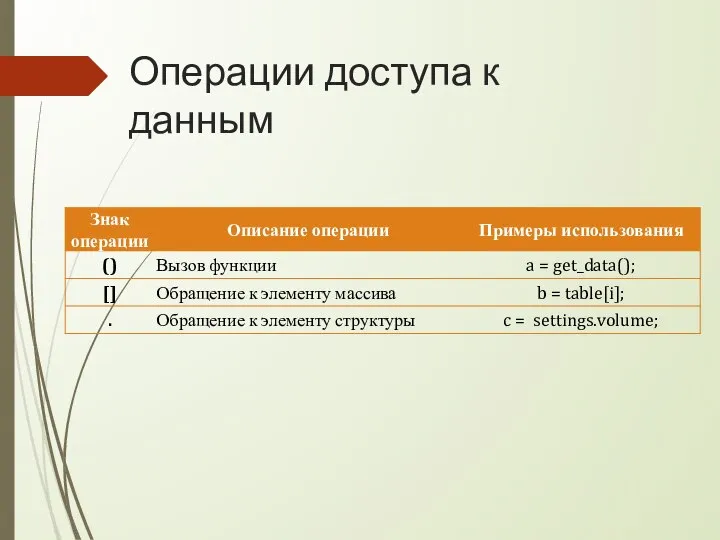
- 41. Операции доступа к данным
- 42. Указатели Указатели – это переменные, хранящие адреса других переменных (то есть адреса ячеек в памяти).
- 43. Указатели Указатель – это переменная, которая хранит адрес ячейки памяти. Память 10 0000 1256 char a
- 44. Объявление переменных-указателей При объявлении обычно задают тип данных, на которые будет указывать переменная: имя_типа* имя_переменной; Например:
- 45. Операции с указателями Для доступа к содержимому ячейки, на которую указывает указатель, перед именем переменной-указателя пишут
- 46. Операции с указателями Для доступа к полю структуры, на которую указывает указатель, между именем переменной-указателя именем
- 47. Операции с указателями Указатели используют для работы с массивами и буферами. // поиск максимального числа в
- 48. Операции с указателями После имени переменной-указателя можно поставить квадратные скобки с индексом и работать с указателем
- 49. Указатель на физическую ячейку Можно объявить указатель, указывающий на ячейку с заданным адресом. Делается это при
- 50. Указатель на неопределённый тип В ряде случаев бывает нужна переменная, которая просто хранит адрес ячейки, без
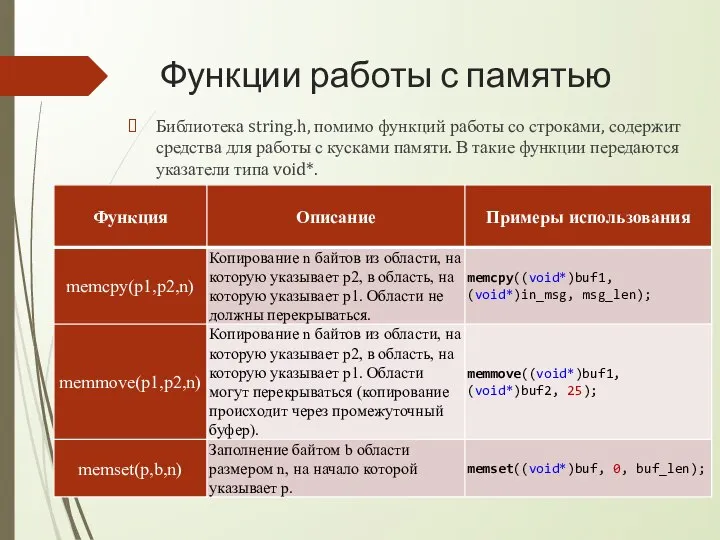
- 51. Функции работы с памятью Библиотека string.h, помимо функций работы со строками, содержит средства для работы с
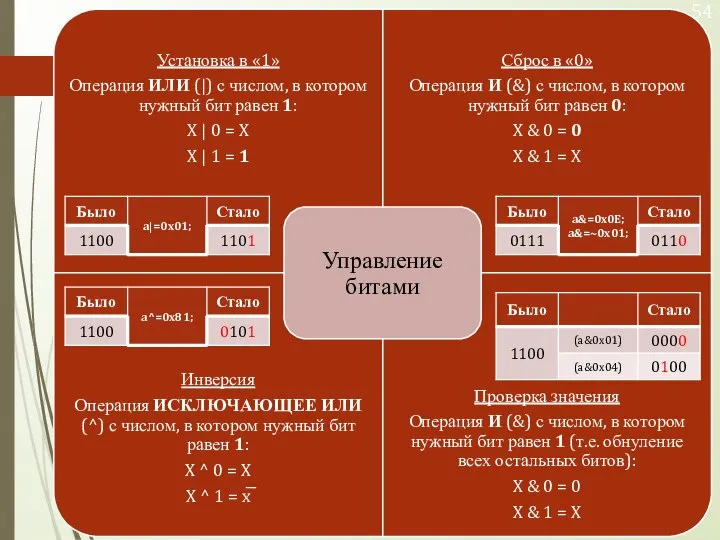
- 52. Управление битами При управлении внешними устройствами, входящими в состав микроконтроллеров, часто встает задача управления отдельными битами
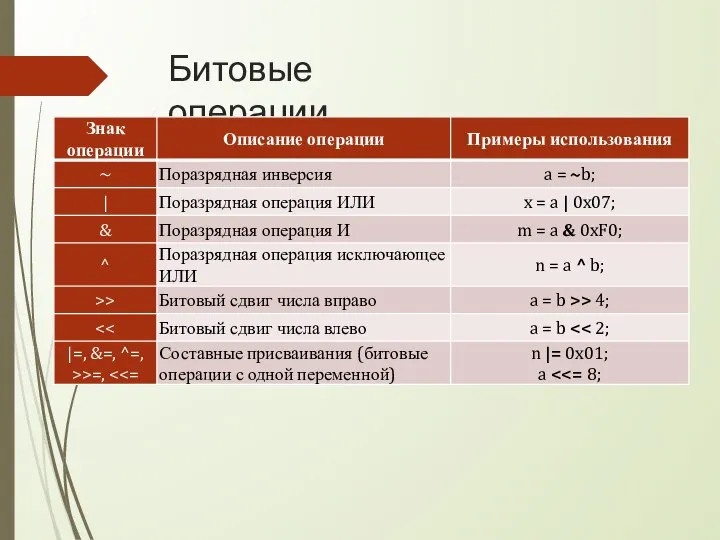
- 53. Битовые операции
- 55. Блоки операторов в Си Это способ описания действий
- 56. Блок операторов Операторы могут быть сгруппированы в блоки или составные операторы: { (последовательность операторов) } Блок
- 57. Функции Функция – основная единица программы в языке Си. В функциях описываются действия, которые должна выполнять
- 58. Функции Функция определяется следующим образом: тип_функции имя_функции (список_параметров) { тело_функции } Имя типа, стоящее перед именем
- 59. Функции Функция может получать параметры и возвращать значения: double GetAverage(double a, double b) { double result
- 60. Функции Если функция не возвращает ничего, вместо типа пишут «void»: void BlinkLED (unsigned char period) {
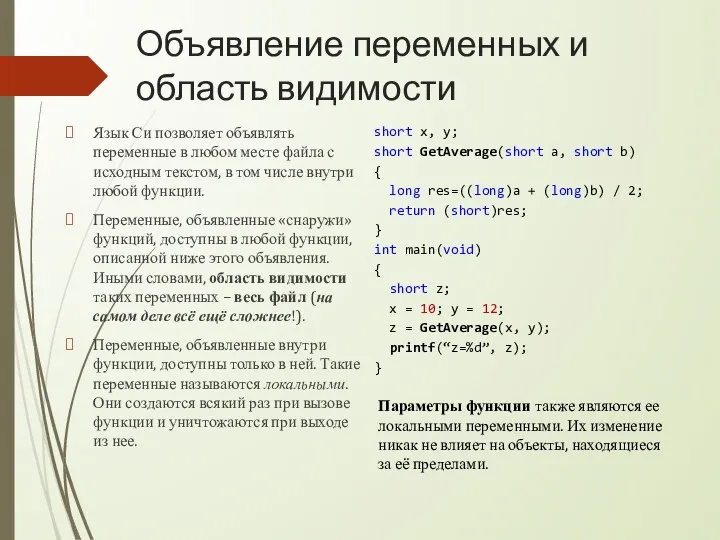
- 61. Объявление переменных и область видимости Язык Си позволяет объявлять переменные в любом месте файла с исходным
- 62. Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – т.н. «препроцессором». Препроцессор
- 63. Препроцессор Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – «препроцессором». Любая строка, начинающееся с
- 64. Препроцессор Типичный пример использования макросов (макроподстановок) – замена константы на символическое имя: #define PI 3.14 Если
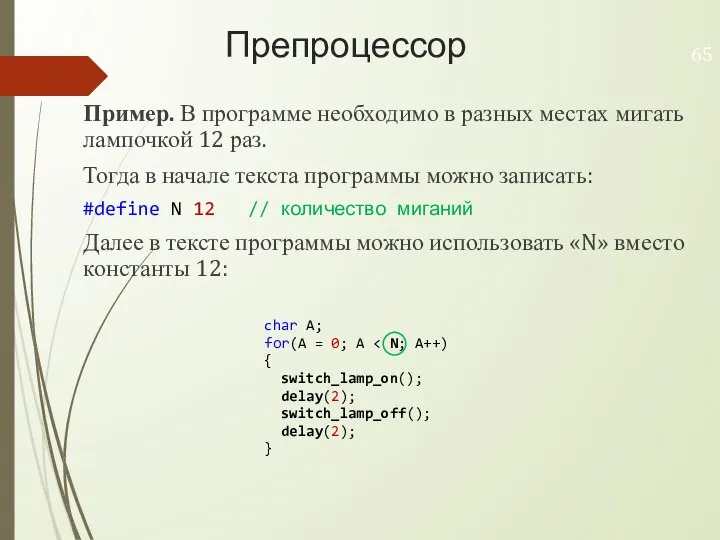
- 65. Препроцессор Пример. В программе необходимо в разных местах мигать лампочкой 12 раз. Тогда в начале текста
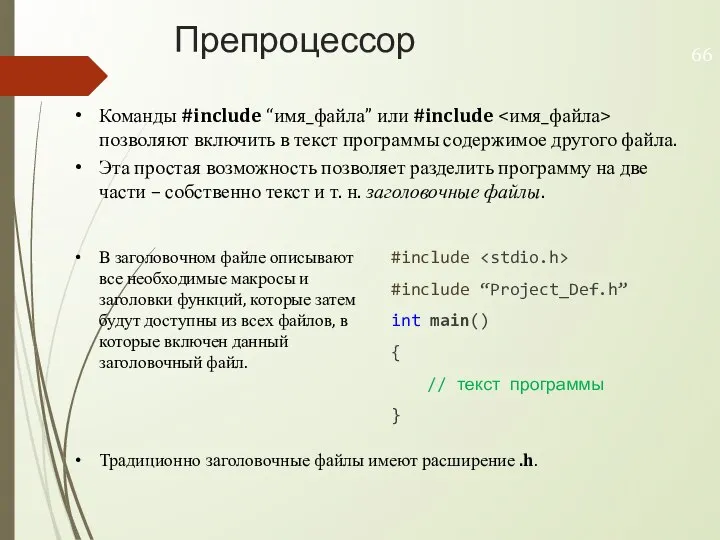
- 66. Препроцессор #include #include “Project_Def.h” int main() { // текст программы } Команды #include “имя_файла” или #include
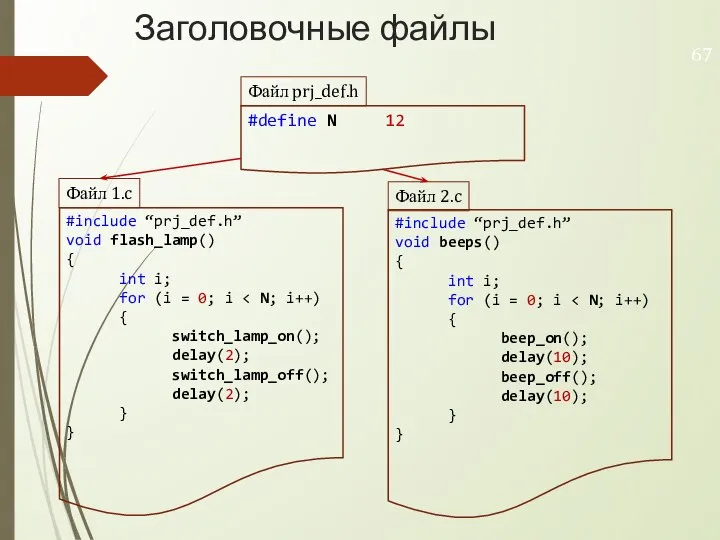
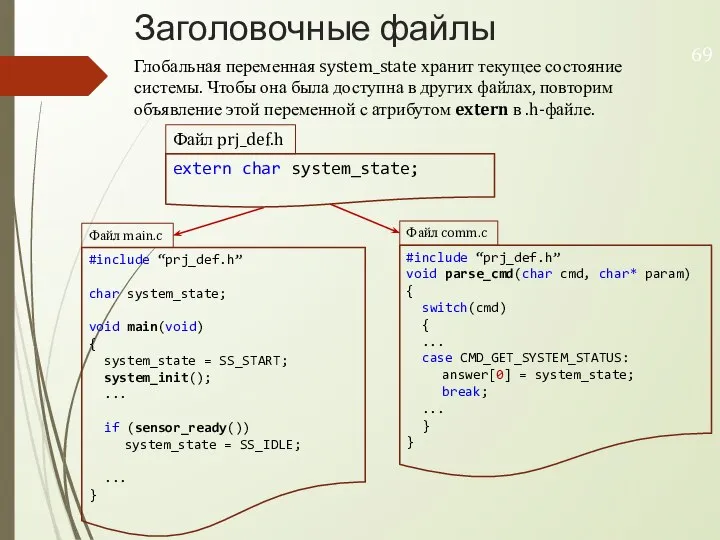
- 67. Заголовочные файлы #include “prj_def.h” void flash_lamp() { int i; for (i = 0; i { switch_lamp_on();
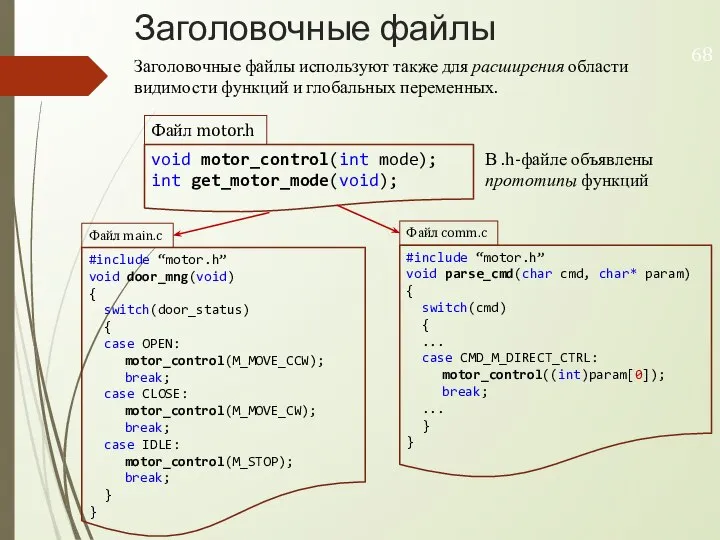
- 68. #include “motor.h” void door_mng(void) { switch(door_status) { case OPEN: motor_control(M_MOVE_CCW); break; case CLOSE: motor_control(M_MOVE_CW); break; case
- 69. #include “prj_def.h” char system_state; void main(void) { system_state = SS_START; system_init(); ... if (sensor_ready()) system_state =
- 70. Взаимодействие между модулями (файлами) ПО Обмен данными между разными файлами проекта происходит при помощи: Глобальных переменных
- 71. Взаимодействие между модулями (файлами) ПО static char system_state; void main(void) { ... } char get_system_state(void) {
- 72. Перечисления (перечислимый тип) Используется, если переменная может принимать строго определённый (перечислимый) набор значений.
- 73. Перечисления Язык Си позволяет ограничить набор возможных значений переменной и назвать каждое из них: enum Motor_cmd
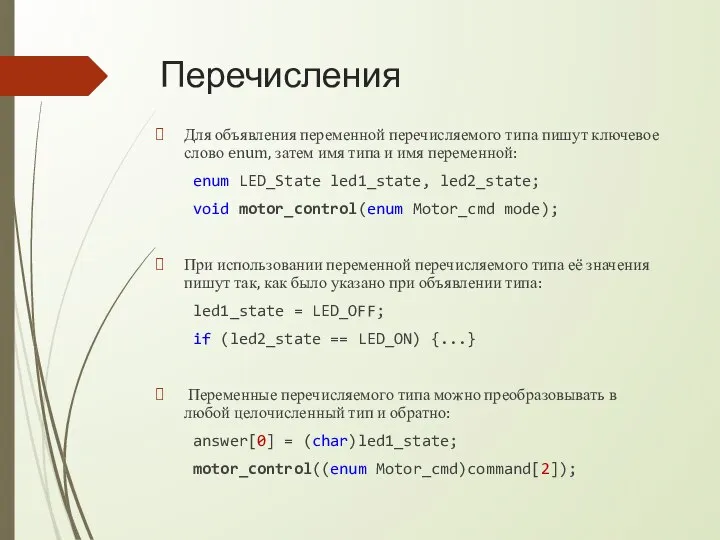
- 74. Перечисления Для объявления переменной перечисляемого типа пишут ключевое слово enum, затем имя типа и имя переменной:
- 75. Приёмы программирования встроенных систем При написании ПО для микроконтроллеров используют ряд стандартных решений
- 76. Приемы программирования встроенных систем Нисходящее и восходящее программирование: правильное проектирование набора функций Повсеместное использование машин состояний
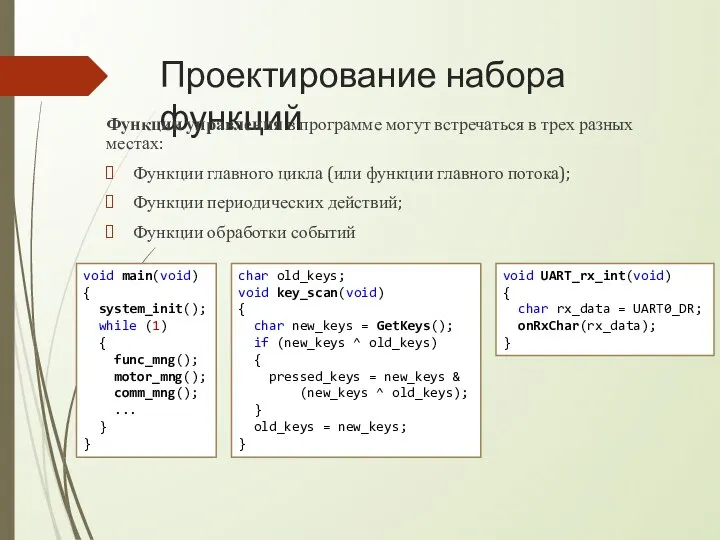
- 77. Проектирование набора функций Функции управления в программе могут встречаться в трех разных местах: Функции главного цикла
- 78. Функции главного цикла Функции главного цикла вызываются из главного бесконечного цикла программы. Частота вызова – максимально
- 79. Функции периодических действий Функции периодических действий вызываются либо из прерывания от таймера либо из главного цикла
- 80. Функции обработки событий Функция обработки событий вызываются либо из прерывания от устройства либо из главного цикла
- 81. Проектирование набора функций Кроме функций управления в программе должны присутствовать и иные функции – функции вычислений
- 82. Задачи программирования встроенных систем Управление устройством (объектом) Взаимодействие с пользователем Регулирование Обмен данными: С внешними устройствами
- 83. Машина состояний В основе программирования систем управления лежит прием, называемый программирование машины состояний. Машина состояний –
- 84. Пример задачи с машиной состояний Рассмотрим задачу управления автоматическими дверьми (например, воротами гаража и т.п.) Есть
- 85. Пример задачи с машиной состояний Управление осуществляется с помощью всего одной кнопки, которая открывает закрытую дверь,
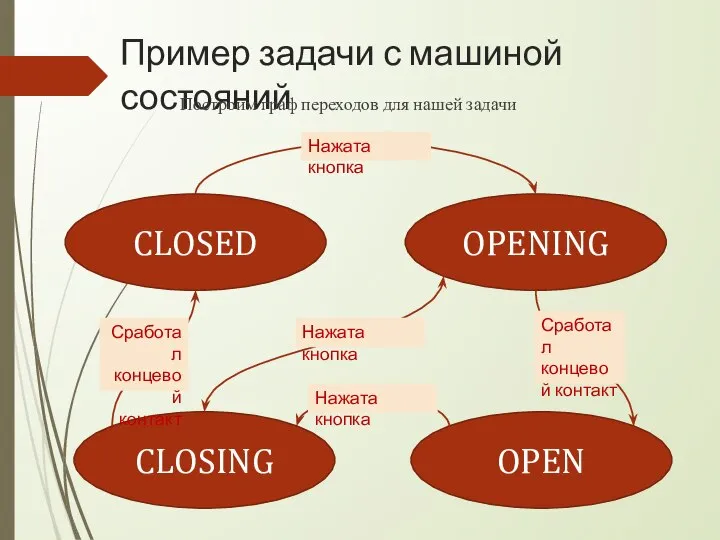
- 86. Пример задачи с машиной состояний Построим граф переходов для нашей задачи CLOSED OPENING OPEN CLOSING Нажата
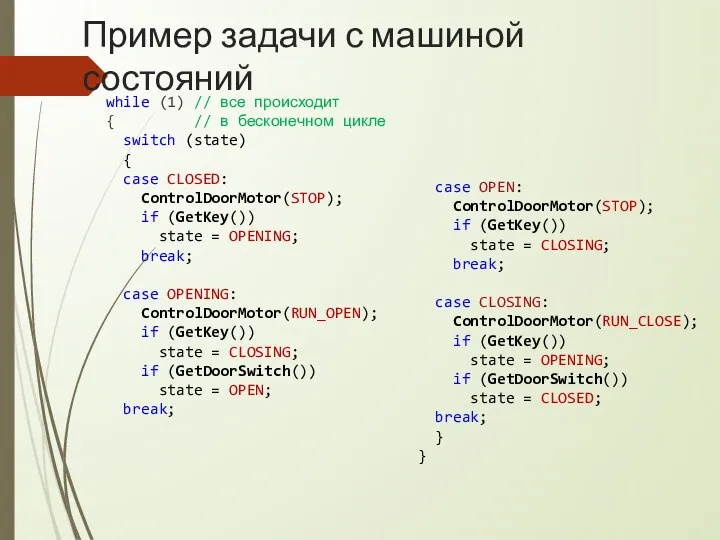
- 87. Пример задачи с машиной состояний while (1) // все происходит { // в бесконечном цикле switch
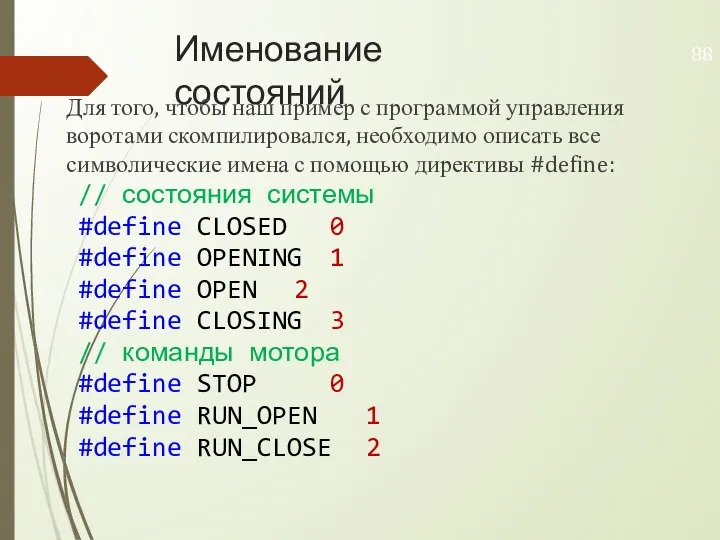
- 88. Именование состояний Для того, чтобы наш пример с программой управления воротами скомпилировался, необходимо описать все символические
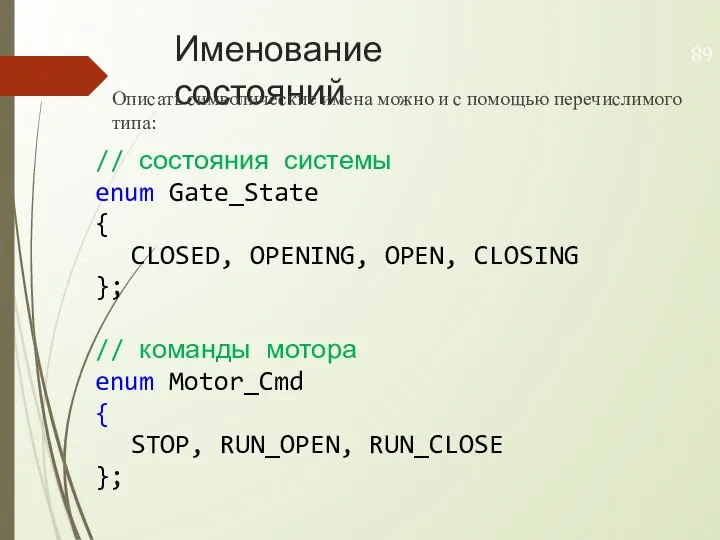
- 89. Именование состояний Описать символические имена можно и с помощью перечислимого типа: // состояния системы enum Gate_State
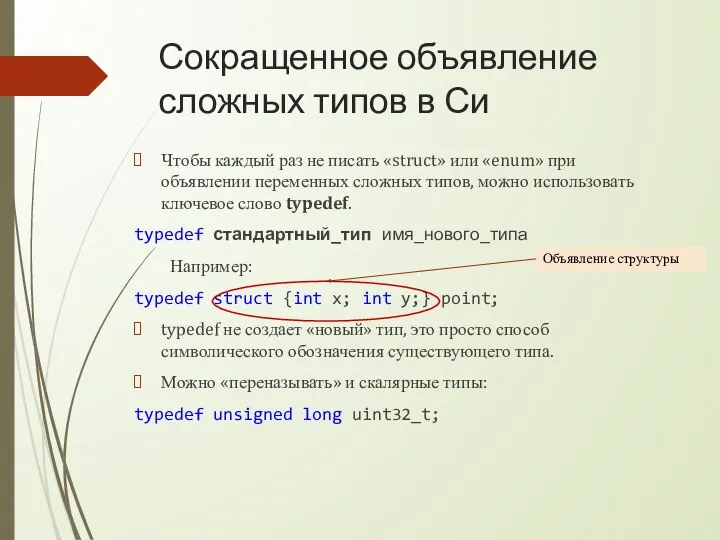
- 90. Сокращенное объявление сложных типов в Си Чтобы каждый раз не писать «struct» или «enum» при объявлении
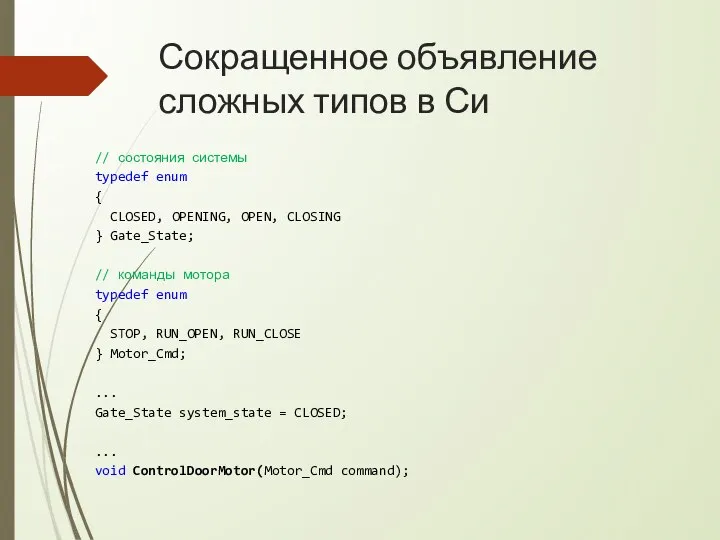
- 91. Сокращенное объявление сложных типов в Си // состояния системы typedef enum { CLOSED, OPENING, OPEN, CLOSING
- 92. Переменные-флаги Вырожденным случаем машины состояний является система с двумя состояниями. Переменная, которая описывает такую систему, называется
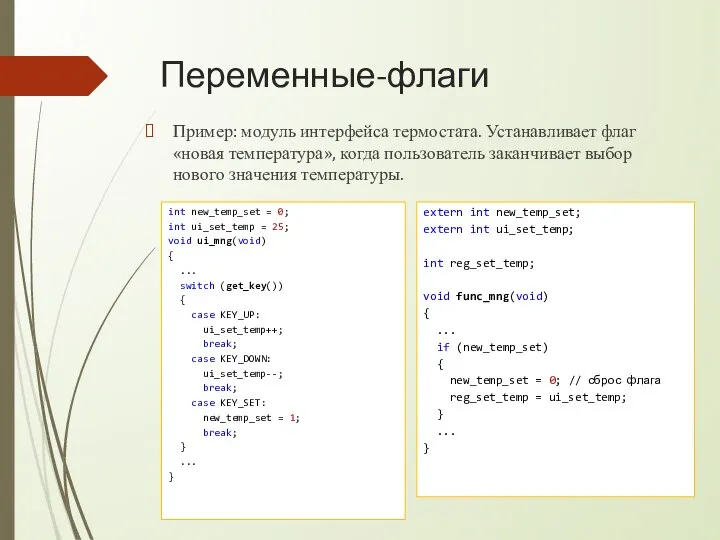
- 93. Переменные-флаги Пример: модуль интерфейса термостата. Устанавливает флаг «новая температура», когда пользователь заканчивает выбор нового значения температуры.
- 94. Пример с интерфейсом пользователя: управляемый светофор В программе, как правило, присутствуют несколько машин состояний, так как
- 95. Машина состояний светофора GREEN BLINKING_GREEN YELLOW RED ? YELLOW_GREEN Gt секунд 5 секунд 3 секунды Rt
- 96. Машина состояний пульта Помимо основной машины состояний, в нашем устройстве будет еще одна машина, отвечающая за
- 97. Машина состояний пульта MAIN EDIT_GREEN EDIT_RED Кнопка «Время З» 10 секунд после отпускания «⇧» или «⇩»
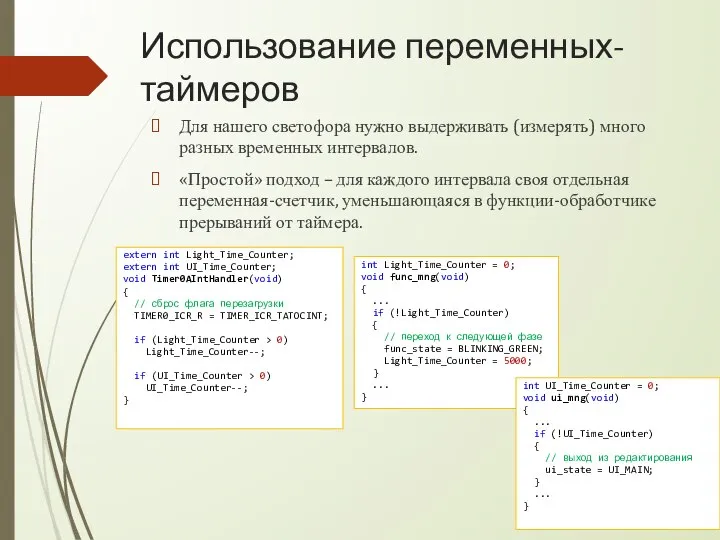
- 98. Использование переменных-таймеров Для нашего светофора нужно выдерживать (измерять) много разных временных интервалов. «Простой» подход – для
- 99. Использование переменных-таймеров У «простого» подхода два недостатка: Плодятся глобальные переменные, причем модуль таймера должен «знать» о
- 100. Использование переменных-таймеров unsigned int Clock_Counter = 0; void Timer0AIntHandler(void) { TIMER0_ICR_R = TIMER_ICR_TATOCINT; Clock_Counter++; } void
- 101. Задачи взаимодействия устройств Взаимодействие сводится к обмену данными между устройствами при помощи цифровых интерфейсов В результате
- 102. Взаимодействие устройств ПК Устройство Команды Ответы Периферийное оборудование
- 103. Функции коммуникационного ПО Функции приема и передачи данных через интерфейсные устройства Функции разбора принятых пакетов данных
- 104. Функции коммуникационного ПО Функция приема пакета Приемный буфер Функция разбора пакета Основное ПО Функция отправки пакета
- 105. Прием пакета Основная задача – синхронизация между медленными интерфейсами, редкими, асинхронными событиями приёма и быстрым ядром.
- 106. Прием пакета Опрос бита готовности: в каждом устройстве (контроллеры SPI, UART, I2C,...) есть регистр статуса, в
- 107. Прием пакета Прерывание: событие приёма байта вызывает прерывание ядра. Данные читаются из устройства в функции обработки
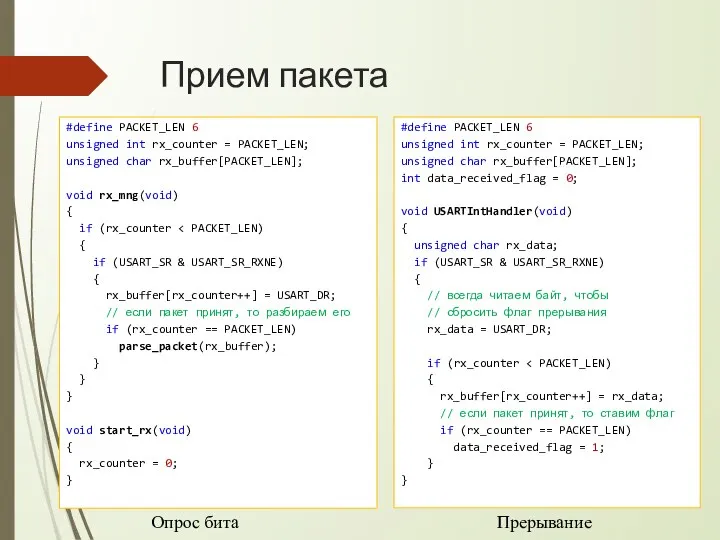
- 108. Прием пакета #define PACKET_LEN 6 unsigned int rx_counter = PACKET_LEN; unsigned char rx_buffer[PACKET_LEN]; void rx_mng(void) {
- 109. Двойная буферизация Функция приема пакета Приёмный буфер 1 Функция разбора пакета Интерфейс Приёмный буфер 2 Флаг
- 110. Двойная буферизация #define PACKET_LEN 6 unsigned int rx_counter = 0; unsigned char rx_buffer1[PACKET_LEN]; unsigned char rx_buffer2[PACKET_LEN];
- 111. Отправка пакета Основная задача, которая здесь решается – синхронизация быстрого ядра и медленного интерфейса: данные отправляются
- 112. Отправка пакета #define PACKET_LEN 6 unsigned int tx_counter = PACKET_LEN; unsigned char tx_buffer[PACKET_LEN]; void tx_mng(void) {
- 113. Взаимодействие систем
- 114. Взаимодействие систем
- 115. Взаимодействие систем
- 116. Упрощенный стек протоколов В простых системах часть уровней «сливаются» друг с другом.
- 117. Упрощенный стек протоколов Пример:
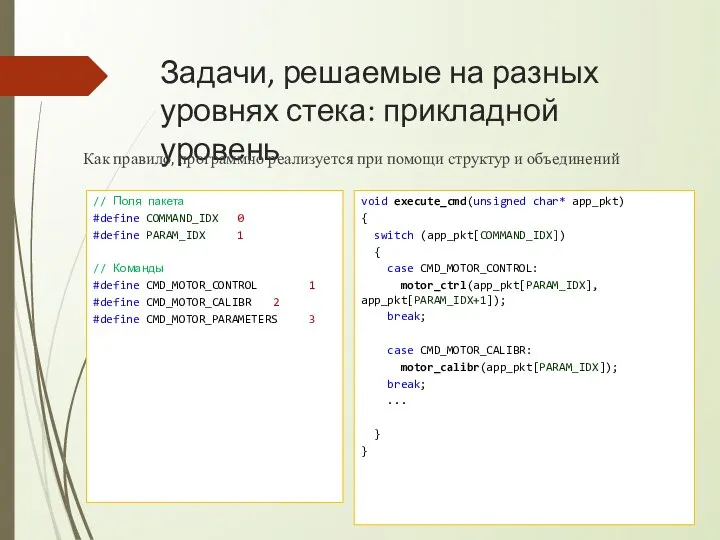
- 118. Задачи, решаемые на разных уровнях стека Прикладной уровень: Поддержка основной функциональности устройства (команды, ответы на них,
- 119. Задачи, решаемые на разных уровнях стека: прикладной уровень Как правило, программно реализуется при помощи структур и
- 120. Задачи, решаемые на разных уровнях стека: прикладной уровень Как правило, программно реализуется при помощи структур и
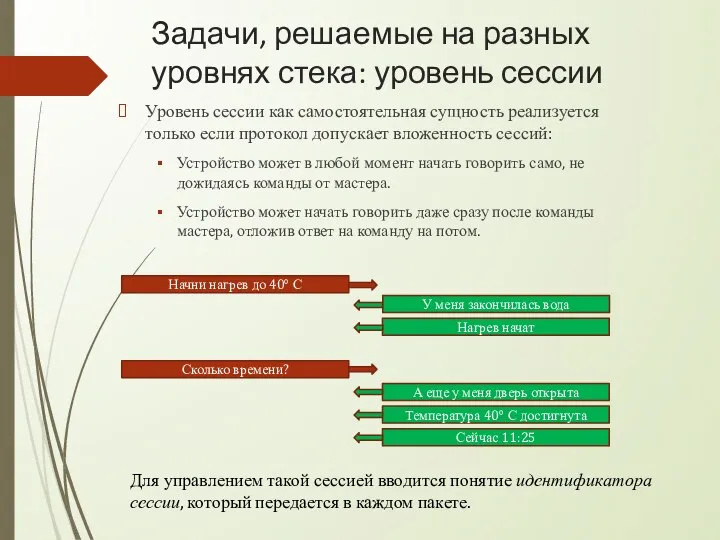
- 121. Задачи, решаемые на разных уровнях стека: уровень сессии Уровень сессии как самостоятельная сущность реализуется только если
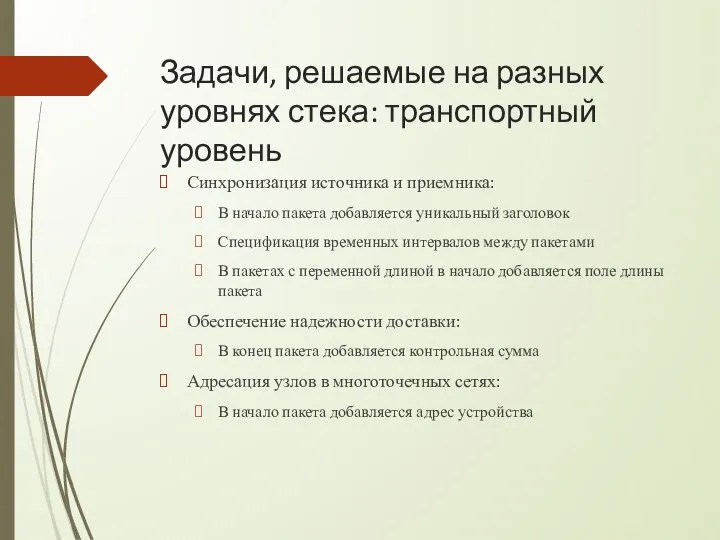
- 122. Задачи, решаемые на разных уровнях стека: транспортный уровень Синхронизация источника и приемника: В начало пакета добавляется
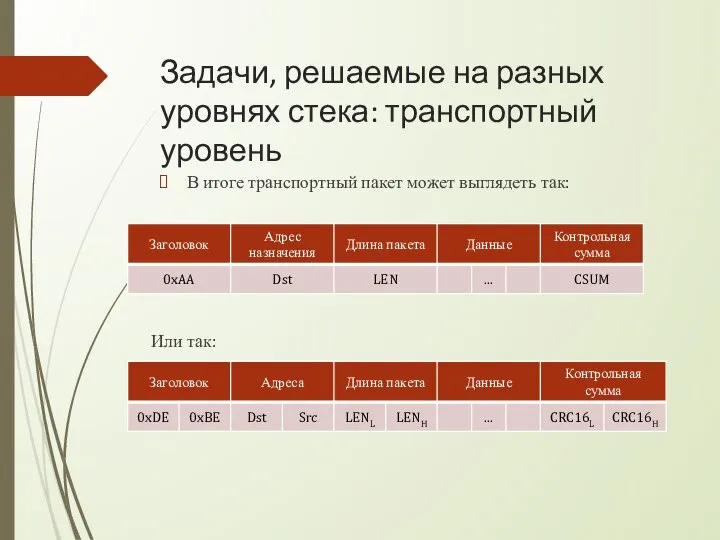
- 123. Задачи, решаемые на разных уровнях стека: транспортный уровень В итоге транспортный пакет может выглядеть так: Или
- 124. Реализация протокола
- 125. Реализация протокола RX_HEADER RX_ADDR RX_LEN RX_DATA RX_CSUM Правильный заголовок Наш адрес Правильная длина Все данные получены
- 127. Скачать презентацию
Слайд 2Микроконтроллер
Микросхема, содержащая в себе функционально законченный компьютер – с ядром (процессором), памятью
Микроконтроллер
Микросхема, содержащая в себе функционально законченный компьютер – с ядром (процессором), памятью
Слайд 3Для обработки информации и принятия решений, необходимо:
Превратить входную информацию в данные, пригодные
Для обработки информации и принятия решений, необходимо:
Превратить входную информацию в данные, пригодные
Слайд 4Программа
Алгоритм
Типы и структуры данных
Интерфейс с внешним миром
Программа
Алгоритм
Типы и структуры данных
Интерфейс с внешним миром
Слайд 5Элементы алгоритмов
Следование. Последовательность действий, выполняющихся друг за другом.
Условие. Точка принятия решения, после
Элементы алгоритмов
Следование. Последовательность действий, выполняющихся друг за другом.
Условие. Точка принятия решения, после
Слайд 6Числа
Двоичная система используется для хранения чисел в памяти компьютера, для их обработки
Числа
Двоичная система используется для хранения чисел в памяти компьютера, для их обработки
Слайд 7Числа
Размер ячеек памяти как правило кратен восьми двоичным разрядам (восьми битам):
Зачастую удобнее
Числа
Размер ячеек памяти как правило кратен восьми двоичным разрядам (восьми битам):
Зачастую удобнее
Слайд 8Взаимодействие вычислительной системы с внешним миром
Устройства ввода:
Кнопки, клавиши, переключатели, энкодеры;
Датчики;
Источники потоковых данных
Взаимодействие вычислительной системы с внешним миром
Устройства ввода:
Кнопки, клавиши, переключатели, энкодеры;
Датчики;
Источники потоковых данных
Слайд 9Взаимодействие вычислительной системы с внешним миром
Все внешние устройства, как правило, представлены для
Взаимодействие вычислительной системы с внешним миром
Все внешние устройства, как правило, представлены для
Слайд 10Параллельный вывод
Память
Ячейка (регистр) PORT_DATA
Выводы микросхемы микроконтроллера
Ядро
D0
D7
Запись числа в ячейку
Параллельный вывод
Память
Ячейка (регистр) PORT_DATA
Выводы микросхемы микроконтроллера
Ядро
D0
D7
Запись числа в ячейку
Слайд 11Параллельный ввод
Память
Ячейка (регистр) PORT_DATA
Выводы микросхемы микроконтроллера
Ядро
D0
D7
Чтение числа из ячейки
Параллельный ввод
Память
Ячейка (регистр) PORT_DATA
Выводы микросхемы микроконтроллера
Ядро
D0
D7
Чтение числа из ячейки
Слайд 12Последовательный ввод/вывод
Память
Регистр данных
SERIAL_DATA
Сдвиговый регистр
Ядро
RX
Опрос готовности
Регистр состояния
SERIAL_STATE
Чтение/запись
TX
CLK
Сигнал прерывания
Последовательный ввод/вывод
Память
Регистр данных
SERIAL_DATA
Сдвиговый регистр
Ядро
RX
Опрос готовности
Регистр состояния
SERIAL_STATE
Чтение/запись
TX
CLK
Сигнал прерывания
Слайд 13Потоковый вывод
Память
Массив видеопамяти
Дисплей
Ядро
Потоковый вывод
Память
Массив видеопамяти
Дисплей
Ядро
Слайд 14Язык Си
Программа на языке Си представляет собой набор текстовых файлов (в простейшем
Язык Си
Программа на языке Си представляет собой набор текстовых файлов (в простейшем
Слайд 15Переменные
Переменная – это область в памяти компьютера, которая имеет имя и хранит
Переменные
Переменная – это область в памяти компьютера, которая имеет имя и хранит
Слайд 16Объявление переменных
Объявление переменной – это описание переменной, которая в дальнейшем будет использоваться
Объявление переменных
Объявление переменной – это описание переменной, которая в дальнейшем будет использоваться
Слайд 17Объявление переменной
Синтаксис оператора объявления:
имя_типа имя_переменной;
Тип переменной определяет, какие данные в ней хранятся
В
Объявление переменной
Синтаксис оператора объявления:
имя_типа имя_переменной;
Тип переменной определяет, какие данные в ней хранятся
В
Слайд 18Типы переменных
Тип переменной (и вообще тип любых данных) – указание компилятору на
Типы переменных
Тип переменной (и вообще тип любых данных) – указание компилятору на
Слайд 19Типы скалярных переменных
Слова «unsigned» / «signed» можно не указывать, однако в этом
Типы скалярных переменных
Слова «unsigned» / «signed» можно не указывать, однако в этом
Слайд 20Функция получения размера переменной
В языке Си есть специальная встроенная функция sizeof(), которая
Функция получения размера переменной
В языке Си есть специальная встроенная функция sizeof(), которая
Слайд 21Константы
Запись чисел (числовых констант) в Си:
255 // десятичное число
0xFF // шестнадцатеричное число
’x’
Константы
Запись чисел (числовых констант) в Си:
255 // десятичное число
0xFF // шестнадцатеричное число
’x’
Слайд 22Оператор присваивания
Присваивание – это запись значения в переменную
Result = 1;
Average = (a
Оператор присваивания
Присваивание – это запись значения в переменную
Result = 1;
Average = (a
Слайд 23Переменные – регистры управления
Все периферийные устройства микроконтроллера управляются при помощи набора регистров,
Переменные – регистры управления
Все периферийные устройства микроконтроллера управляются при помощи набора регистров,
Слайд 24Переменные – регистры управления
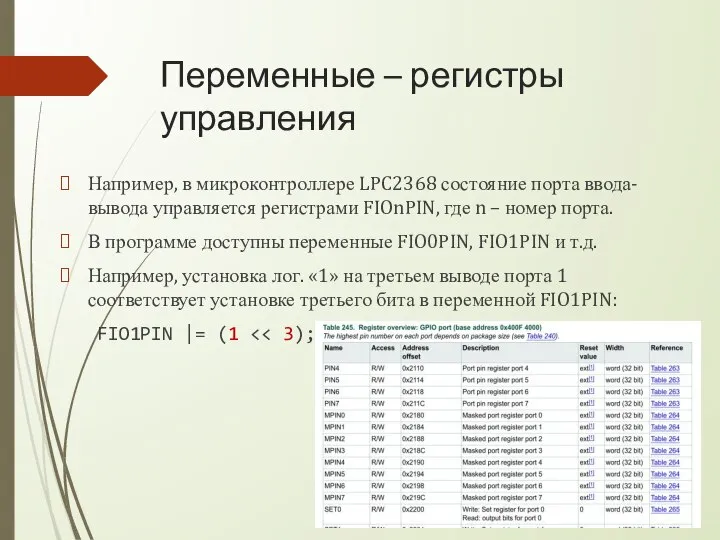
Например, в микроконтроллере LPC2368 состояние порта ввода-вывода управляется регистрами
Переменные – регистры управления
Например, в микроконтроллере LPC2368 состояние порта ввода-вывода управляется регистрами
Слайд 25Выражения в языке C
Везде, где согласно правилу написания того или иного оператора
Выражения в языке C
Везде, где согласно правилу написания того или иного оператора
Слайд 26Арифметические операции
Арифметические операции
Слайд 27Сложные типы данных
Сложные типы состоят из нескольких простых (скалярных) типов. Сложные типы
Сложные типы данных
Сложные типы состоят из нескольких простых (скалярных) типов. Сложные типы

Слайд 28Массивы
Массив или вектор – переменная, хранящая ряд значений одного типа
t0, t1, t2,
Массивы
Массив или вектор – переменная, хранящая ряд значений одного типа
t0, t1, t2,
Слайд 29Массивы
Массив объявляется так же, как и простая (скалярная) переменная, однако после имени
Массивы
Массив объявляется так же, как и простая (скалярная) переменная, однако после имени
Слайд 30Работа с элементами массивов
Для доступа к элементу массива в квадратных скобках после
Работа с элементами массивов
Для доступа к элементу массива в квадратных скобках после
Слайд 31Работа с элементами массивов
Для того, чтобы посчитать количество элементов массива, можно воспользоваться
Работа с элементами массивов
Для того, чтобы посчитать количество элементов массива, можно воспользоваться
Слайд 32Строки символов
Строка символов в языке Си считается массивом из 8-разрядных чисел (значений
Строки символов
Строка символов в языке Си считается массивом из 8-разрядных чисел (значений
Слайд 33Строковые функции
Строковые функции
Слайд 34Строки символов
Так как в конце строки стоит признак конца строки (символ с
Строки символов
Так как в конце строки стоит признак конца строки (символ с
Слайд 35Структуры
Язык Си позволяет объединять переменные разных типов в структуры:
struct Point
{
signed short x;
signed
Структуры
Язык Си позволяет объединять переменные разных типов в структуры:
struct Point
{
signed short x;
signed
Слайд 36Структуры
Для объявления переменной типа структуры пишут ключевое слово struct, затем имя структуры,
Структуры
Для объявления переменной типа структуры пишут ключевое слово struct, затем имя структуры,
Слайд 37Расположение структур в памяти
Элементы структуры хранятся последовательно, друг за другом, но с
Расположение структур в памяти
Элементы структуры хранятся последовательно, друг за другом, но с
Слайд 38Структуры с битовыми полями
Для доступа к отдельным битам и просто для экономии
Структуры с битовыми полями
Для доступа к отдельным битам и просто для экономии
Слайд 39Объединения
Объединения – это способ описать одну и ту же область памяти по
Объединения
Объединения – это способ описать одну и ту же область памяти по
Слайд 40Объединения
Объединения удобно использовать для работы с пакетами данных.
struct Message_str
{
unsigned char Header
unsigned
Объединения
Объединения удобно использовать для работы с пакетами данных.
struct Message_str
{
unsigned char Header
unsigned
Слайд 41Операции доступа к данным
Операции доступа к данным
Слайд 42Указатели
Указатели – это переменные, хранящие адреса других переменных (то есть адреса ячеек
Указатели
Указатели – это переменные, хранящие адреса других переменных (то есть адреса ячеек
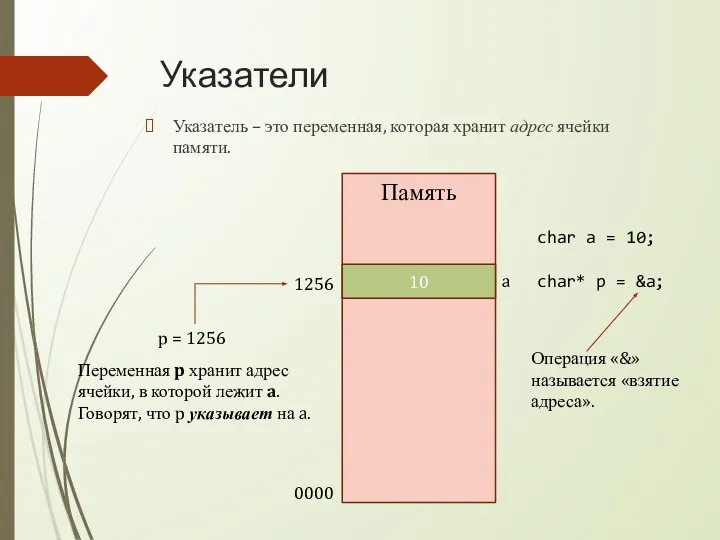
Слайд 43Указатели
Указатель – это переменная, которая хранит адрес ячейки памяти.
Память
10
0000
1256
char a =
Указатели
Указатель – это переменная, которая хранит адрес ячейки памяти.
Память
10
0000
1256
char a =
Слайд 44Объявление переменных-указателей
При объявлении обычно задают тип данных, на которые будет указывать переменная:
имя_типа*
Объявление переменных-указателей
При объявлении обычно задают тип данных, на которые будет указывать переменная:
имя_типа*
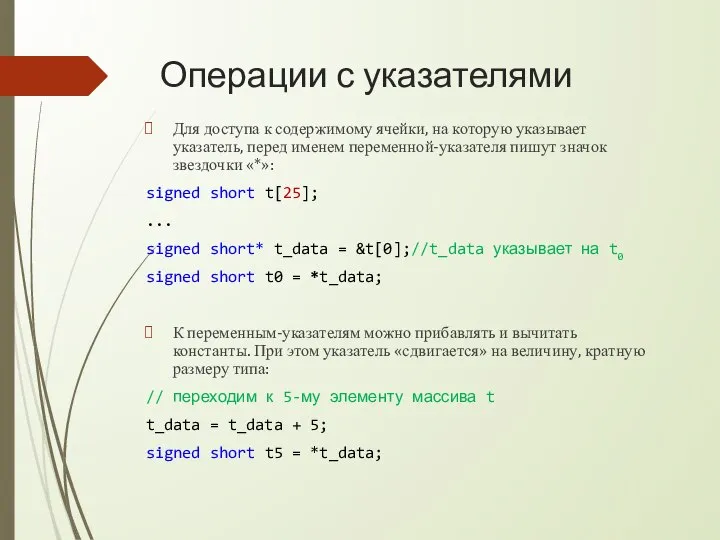
Слайд 45Операции с указателями
Для доступа к содержимому ячейки, на которую указывает указатель, перед
Операции с указателями
Для доступа к содержимому ячейки, на которую указывает указатель, перед
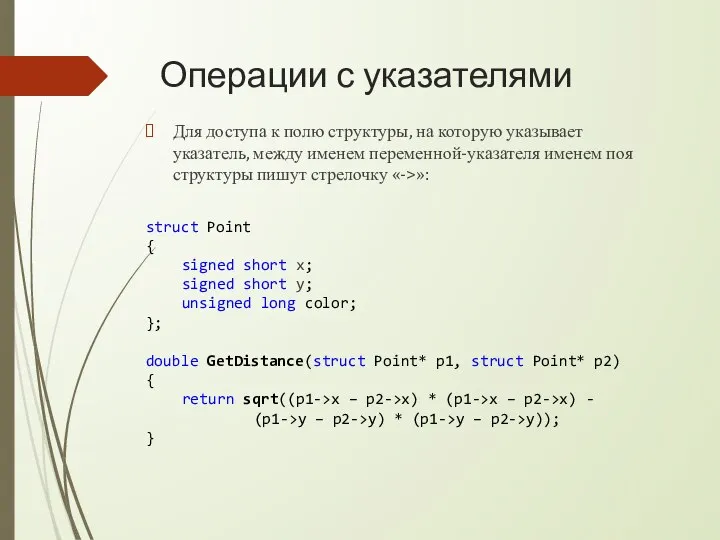
Слайд 46Операции с указателями
Для доступа к полю структуры, на которую указывает указатель, между
Операции с указателями
Для доступа к полю структуры, на которую указывает указатель, между
Слайд 47Операции с указателями
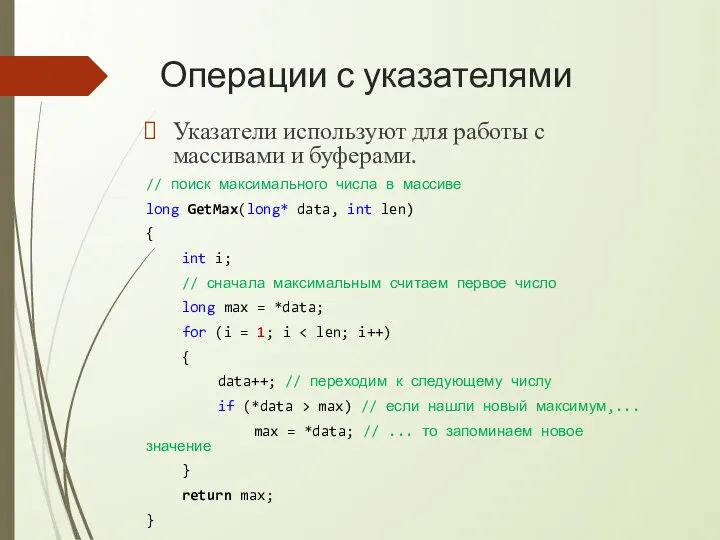
Указатели используют для работы с массивами и буферами.
// поиск максимального
Операции с указателями
Указатели используют для работы с массивами и буферами.
// поиск максимального
Слайд 48Операции с указателями
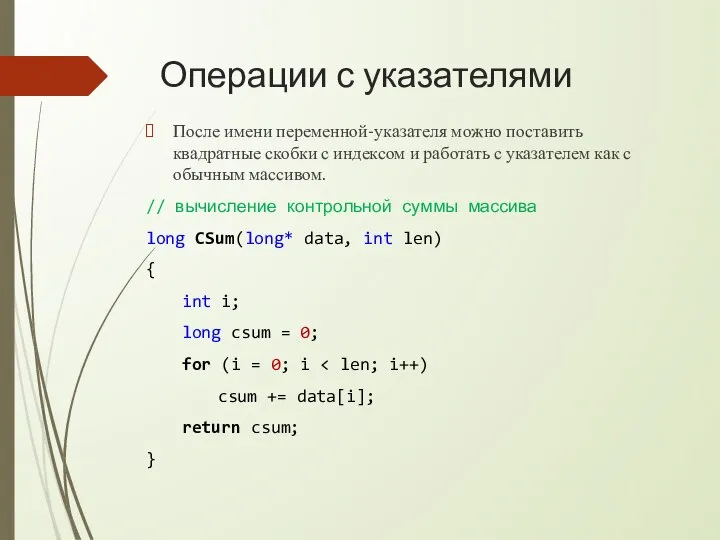
После имени переменной-указателя можно поставить квадратные скобки с индексом и
Операции с указателями
После имени переменной-указателя можно поставить квадратные скобки с индексом и
Слайд 49Указатель на физическую ячейку
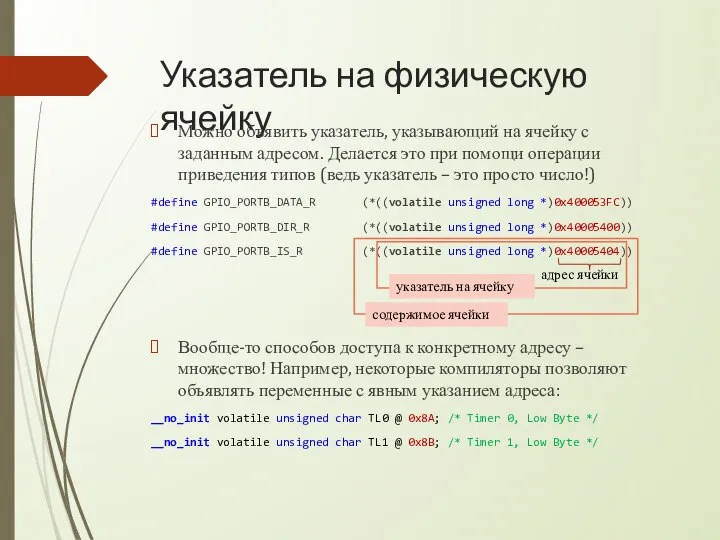
Можно объявить указатель, указывающий на ячейку с заданным адресом.
Указатель на физическую ячейку
Можно объявить указатель, указывающий на ячейку с заданным адресом.
Слайд 50Указатель на неопределённый тип
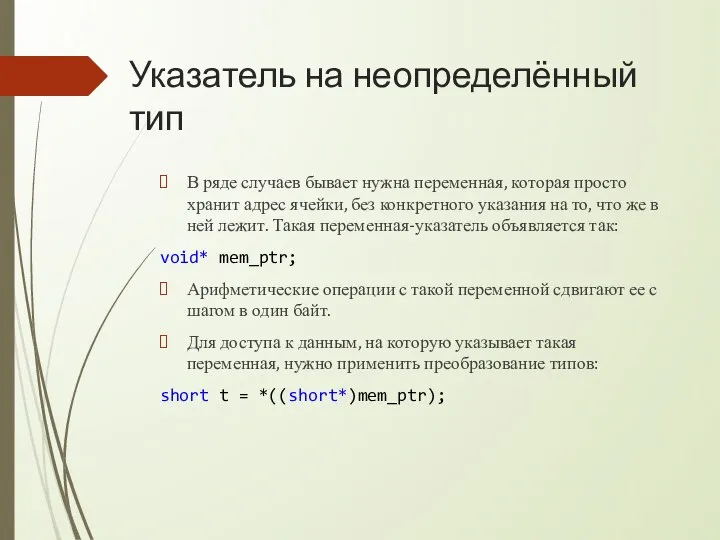
В ряде случаев бывает нужна переменная, которая просто хранит
Указатель на неопределённый тип
В ряде случаев бывает нужна переменная, которая просто хранит
Слайд 51Функции работы с памятью
Библиотека string.h, помимо функций работы со строками, содержит средства
Функции работы с памятью
Библиотека string.h, помимо функций работы со строками, содержит средства
Слайд 52Управление битами
При управлении внешними устройствами, входящими в состав микроконтроллеров, часто встает задача
Управление битами
При управлении внешними устройствами, входящими в состав микроконтроллеров, часто встает задача

Слайд 53Битовые операции
Битовые операции
Слайд 55Блоки операторов в Си
Это способ описания действий
Блоки операторов в Си
Это способ описания действий

Слайд 56Блок операторов
Операторы могут быть сгруппированы в блоки или составные операторы:
{
(последовательность операторов)
}
Блок
Блок операторов
Операторы могут быть сгруппированы в блоки или составные операторы:
{
(последовательность операторов)
}
Блок
Слайд 57Функции
Функция – основная единица программы в языке Си. В функциях описываются действия,
Функции
Функция – основная единица программы в языке Си. В функциях описываются действия,
Слайд 58Функции
Функция определяется следующим образом:
тип_функции имя_функции (список_параметров)
{
тело_функции
}
Имя типа, стоящее перед именем функции,
Функции
Функция определяется следующим образом:
тип_функции имя_функции (список_параметров)
{
тело_функции
}
Имя типа, стоящее перед именем функции,
Слайд 59Функции
Функция может получать параметры и возвращать значения:
double GetAverage(double a, double b)
{
Функции
Функция может получать параметры и возвращать значения:
double GetAverage(double a, double b)
{
Слайд 60Функции
Если функция не возвращает ничего, вместо типа пишут «void»:
void BlinkLED (unsigned char
Функции
Если функция не возвращает ничего, вместо типа пишут «void»:
void BlinkLED (unsigned char
Слайд 61Объявление переменных и область видимости
Язык Си позволяет объявлять переменные в любом месте
Объявление переменных и область видимости
Язык Си позволяет объявлять переменные в любом месте
Слайд 62Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – т.н. «препроцессором».
Препроцессор
Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – т.н. «препроцессором».
Препроцессор
Слайд 63Препроцессор
Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – «препроцессором».
Любая строка,
Препроцессор
Непосредственно перед компиляцией текст программы обрабатывается специальным текстовым процессором – «препроцессором».
Любая строка,
Слайд 64Препроцессор
Типичный пример использования макросов (макроподстановок) – замена константы на символическое имя:
#define PI
Препроцессор
Типичный пример использования макросов (макроподстановок) – замена константы на символическое имя:
#define PI
Слайд 65Препроцессор
Пример. В программе необходимо в разных местах мигать лампочкой 12 раз.
Тогда в
Препроцессор
Пример. В программе необходимо в разных местах мигать лампочкой 12 раз.
Тогда в
Слайд 66Препроцессор
#include
#include “Project_Def.h”
int main()
{
// текст программы
}
Команды #include “имя_файла” или #include <имя_файла> позволяют
Препроцессор
#include Команды #include “имя_файла” или #include <имя_файла> позволяют
#include “Project_Def.h”
int main()
{
// текст программы
}
Слайд 67Заголовочные файлы
#include “prj_def.h”
void flash_lamp()
{
int i;
for (i = 0; i <
Заголовочные файлы
#include “prj_def.h”
void flash_lamp()
{
int i;
for (i = 0; i <
Слайд 68#include “motor.h”
void door_mng(void)
{
switch(door_status)
{
case OPEN:
motor_control(M_MOVE_CCW);
break;
case CLOSE:
motor_control(M_MOVE_CW);
break;
case IDLE:
motor_control(M_STOP);
break;
}
}
#include
#include “motor.h”
void door_mng(void)
{
switch(door_status)
{
case OPEN:
motor_control(M_MOVE_CCW);
break;
case CLOSE:
motor_control(M_MOVE_CW);
break;
case IDLE:
motor_control(M_STOP);
break;
}
}
#include
Слайд 69#include “prj_def.h”
char system_state;
void main(void)
{
system_state = SS_START;
system_init();
...
if (sensor_ready())
system_state =
#include “prj_def.h”
char system_state;
void main(void)
{
system_state = SS_START;
system_init();
...
if (sensor_ready())
system_state =
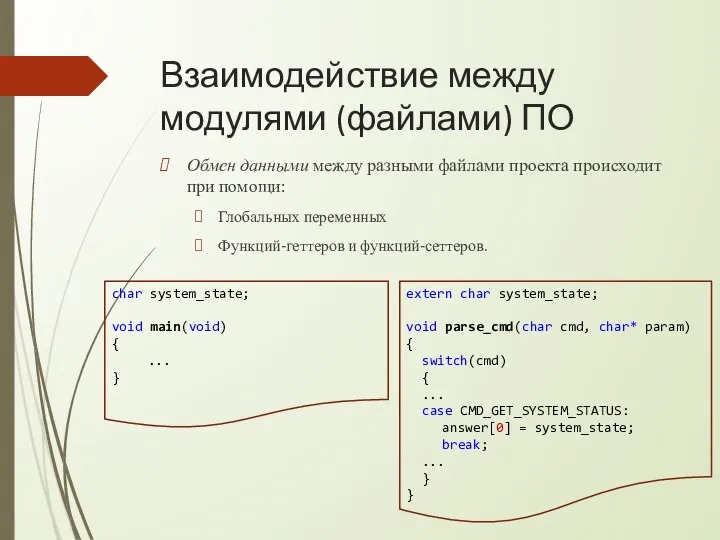
Слайд 70Взаимодействие между модулями (файлами) ПО
Обмен данными между разными файлами проекта происходит при
Взаимодействие между модулями (файлами) ПО
Обмен данными между разными файлами проекта происходит при
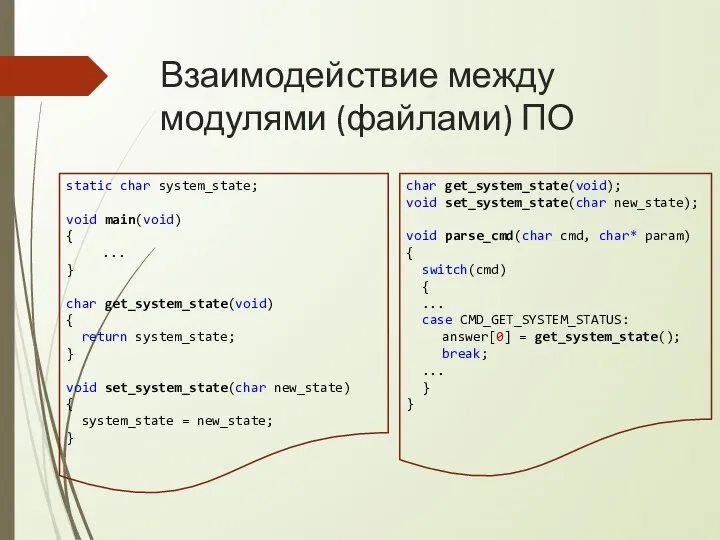
Слайд 71Взаимодействие между модулями (файлами) ПО
static char system_state;
void main(void)
{
...
}
char get_system_state(void)
{
return system_state;
}
void set_system_state(char
Взаимодействие между модулями (файлами) ПО
static char system_state;
void main(void)
{
...
}
char get_system_state(void)
{
return system_state;
}
void set_system_state(char
Слайд 72Перечисления (перечислимый тип)
Используется, если переменная может принимать строго определённый (перечислимый) набор значений.
Перечисления (перечислимый тип)
Используется, если переменная может принимать строго определённый (перечислимый) набор значений.

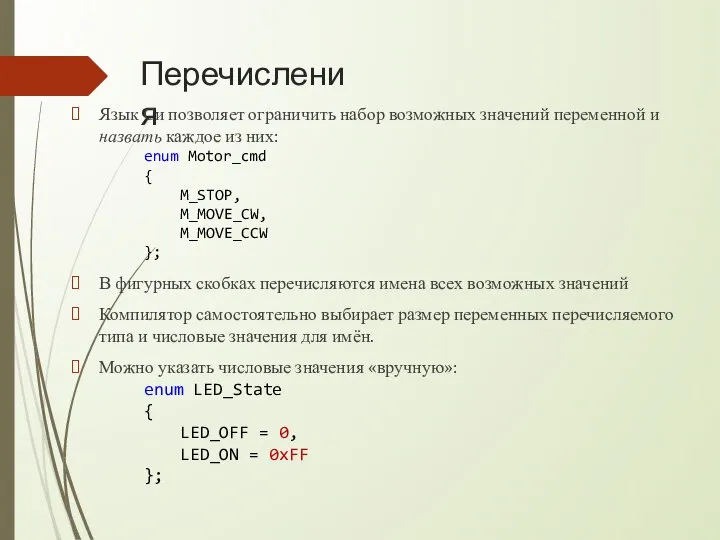
Слайд 73Перечисления
Язык Си позволяет ограничить набор возможных значений переменной и назвать каждое из
Перечисления
Язык Си позволяет ограничить набор возможных значений переменной и назвать каждое из
Слайд 74Перечисления
Для объявления переменной перечисляемого типа пишут ключевое слово enum, затем имя типа
Перечисления
Для объявления переменной перечисляемого типа пишут ключевое слово enum, затем имя типа
Слайд 75Приёмы программирования встроенных систем
При написании ПО для микроконтроллеров используют ряд стандартных решений
Приёмы программирования встроенных систем
При написании ПО для микроконтроллеров используют ряд стандартных решений
Слайд 76Приемы программирования встроенных систем
Нисходящее и восходящее программирование: правильное проектирование набора функций
Повсеместное использование
Приемы программирования встроенных систем
Нисходящее и восходящее программирование: правильное проектирование набора функций
Повсеместное использование
Слайд 77Проектирование набора функций
Функции управления в программе могут встречаться в трех разных местах:
Функции
Проектирование набора функций
Функции управления в программе могут встречаться в трех разных местах:
Функции
Слайд 78Функции главного цикла
Функции главного цикла вызываются из главного бесконечного цикла программы. Частота
Функции главного цикла
Функции главного цикла вызываются из главного бесконечного цикла программы. Частота
Слайд 79Функции периодических действий
Функции периодических действий вызываются либо из прерывания от таймера либо
Функции периодических действий
Функции периодических действий вызываются либо из прерывания от таймера либо
Слайд 80Функции обработки событий
Функция обработки событий вызываются либо из прерывания от устройства либо
Функции обработки событий
Функция обработки событий вызываются либо из прерывания от устройства либо
Слайд 81Проектирование набора функций
Кроме функций управления в программе должны присутствовать и иные функции
Проектирование набора функций
Кроме функций управления в программе должны присутствовать и иные функции
Слайд 82Задачи программирования встроенных систем
Управление устройством (объектом)
Взаимодействие с пользователем
Регулирование
Обмен данными:
С внешними устройствами на
Задачи программирования встроенных систем
Управление устройством (объектом)
Взаимодействие с пользователем
Регулирование
Обмен данными:
С внешними устройствами на
Слайд 83Машина состояний
В основе программирования систем управления лежит прием, называемый программирование машины состояний.
Машина
Машина состояний
В основе программирования систем управления лежит прием, называемый программирование машины состояний.
Машина
Слайд 84Пример задачи с машиной состояний
Рассмотрим задачу управления автоматическими дверьми (например, воротами гаража
Пример задачи с машиной состояний
Рассмотрим задачу управления автоматическими дверьми (например, воротами гаража
Слайд 85Пример задачи с машиной состояний
Управление осуществляется с помощью всего одной кнопки, которая
Пример задачи с машиной состояний
Управление осуществляется с помощью всего одной кнопки, которая
Слайд 86Пример задачи с машиной состояний
Построим граф переходов для нашей задачи
CLOSED
OPENING
OPEN
CLOSING
Нажата кнопка
Сработал концевой
Пример задачи с машиной состояний
Построим граф переходов для нашей задачи
CLOSED
OPENING
OPEN
CLOSING
Нажата кнопка
Сработал концевой
Слайд 87Пример задачи с машиной состояний
while (1) // все происходит
{ // в бесконечном
Пример задачи с машиной состояний
while (1) // все происходит
{ // в бесконечном
Слайд 88Именование состояний
Для того, чтобы наш пример с программой управления воротами скомпилировался, необходимо
Именование состояний
Для того, чтобы наш пример с программой управления воротами скомпилировался, необходимо
Слайд 89Именование состояний
Описать символические имена можно и с помощью перечислимого типа:
// состояния системы
enum
Именование состояний
Описать символические имена можно и с помощью перечислимого типа:
// состояния системы
enum
Слайд 90Сокращенное объявление сложных типов в Си
Чтобы каждый раз не писать «struct» или
Сокращенное объявление сложных типов в Си
Чтобы каждый раз не писать «struct» или
Слайд 91Сокращенное объявление сложных типов в Си
// состояния системы
typedef enum
{
CLOSED, OPENING,
Сокращенное объявление сложных типов в Си
// состояния системы
typedef enum
{
CLOSED, OPENING,
Слайд 92Переменные-флаги
Вырожденным случаем машины состояний является система с двумя состояниями. Переменная, которая описывает
Переменные-флаги
Вырожденным случаем машины состояний является система с двумя состояниями. Переменная, которая описывает
Слайд 93Переменные-флаги
Пример: модуль интерфейса термостата. Устанавливает флаг «новая температура», когда пользователь заканчивает выбор
Переменные-флаги
Пример: модуль интерфейса термостата. Устанавливает флаг «новая температура», когда пользователь заканчивает выбор
Слайд 94Пример с интерфейсом пользователя: управляемый светофор
В программе, как правило, присутствуют несколько машин
Пример с интерфейсом пользователя: управляемый светофор
В программе, как правило, присутствуют несколько машин
Слайд 95Машина состояний светофора
GREEN
BLINKING_GREEN
YELLOW
RED
?
YELLOW_GREEN
Gt секунд
5 секунд
3 секунды
Rt секунд
3 секунды
Rt секунд
или кнопка «К»
или кнопка
Машина состояний светофора
GREEN
BLINKING_GREEN
YELLOW
RED
?
YELLOW_GREEN
Gt секунд
5 секунд
3 секунды
Rt секунд
3 секунды
Rt секунд
или кнопка «К»
или кнопка

Слайд 96Машина состояний пульта
Помимо основной машины состояний, в нашем устройстве будет еще одна
Машина состояний пульта
Помимо основной машины состояний, в нашем устройстве будет еще одна
Слайд 97Машина состояний пульта
MAIN
EDIT_GREEN
EDIT_RED
Кнопка «Время З»
10 секунд после
отпускания «⇧» или «⇩»
Кнопка «Время
Машина состояний пульта
MAIN
EDIT_GREEN
EDIT_RED
Кнопка «Время З»
10 секунд после
отпускания «⇧» или «⇩»
Кнопка «Время

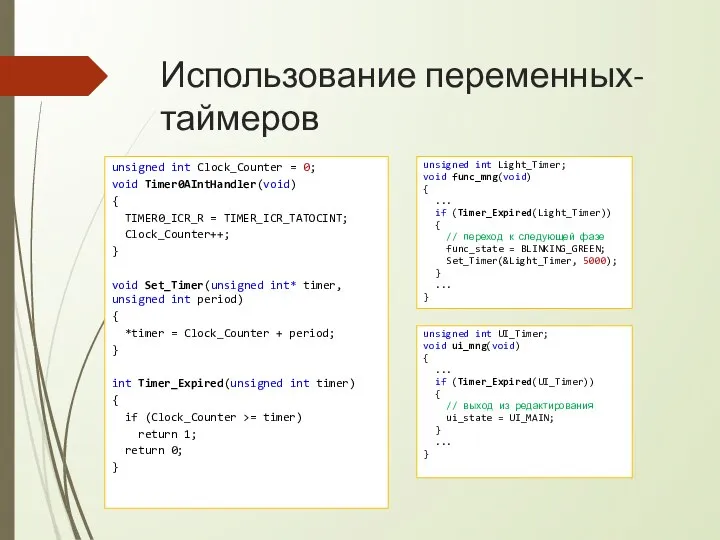
Слайд 98Использование переменных-таймеров
Для нашего светофора нужно выдерживать (измерять) много разных временных интервалов.
«Простой» подход
Использование переменных-таймеров
Для нашего светофора нужно выдерживать (измерять) много разных временных интервалов.
«Простой» подход
Слайд 99Использование переменных-таймеров
У «простого» подхода два недостатка:
Плодятся глобальные переменные, причем модуль таймера должен
Использование переменных-таймеров
У «простого» подхода два недостатка:
Плодятся глобальные переменные, причем модуль таймера должен
Слайд 100Использование переменных-таймеров
unsigned int Clock_Counter = 0;
void Timer0AIntHandler(void)
{
TIMER0_ICR_R = TIMER_ICR_TATOCINT;
Clock_Counter++;
}
void Set_Timer(unsigned
Использование переменных-таймеров
unsigned int Clock_Counter = 0;
void Timer0AIntHandler(void)
{
TIMER0_ICR_R = TIMER_ICR_TATOCINT;
Clock_Counter++;
}
void Set_Timer(unsigned
Слайд 101Задачи взаимодействия устройств
Взаимодействие сводится к обмену данными между устройствами при помощи цифровых
Задачи взаимодействия устройств
Взаимодействие сводится к обмену данными между устройствами при помощи цифровых
Слайд 102Взаимодействие устройств
ПК
Устройство
Команды
Ответы
Периферийное оборудование
Взаимодействие устройств
ПК
Устройство
Команды
Ответы
Периферийное оборудование

Слайд 103Функции коммуникационного ПО
Функции приема и передачи данных через интерфейсные устройства
Функции разбора принятых
Функции коммуникационного ПО
Функции приема и передачи данных через интерфейсные устройства
Функции разбора принятых
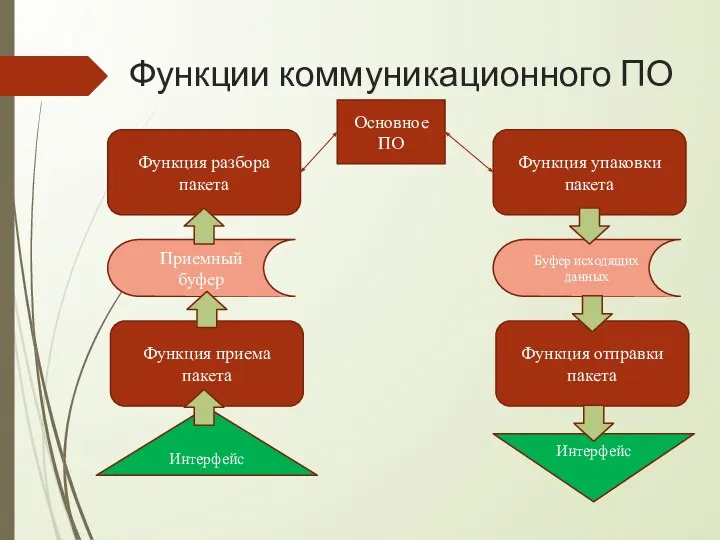
Слайд 104Функции коммуникационного ПО
Функция приема пакета
Приемный буфер
Функция разбора пакета
Основное ПО
Функция отправки пакета
Буфер исходящих
Функции коммуникационного ПО
Функция приема пакета
Приемный буфер
Функция разбора пакета
Основное ПО
Функция отправки пакета
Буфер исходящих
Слайд 105Прием пакета
Основная задача – синхронизация между медленными интерфейсами, редкими, асинхронными событиями приёма
Прием пакета
Основная задача – синхронизация между медленными интерфейсами, редкими, асинхронными событиями приёма
Слайд 106Прием пакета
Опрос бита готовности: в каждом устройстве (контроллеры SPI, UART, I2C,...) есть
Прием пакета
Опрос бита готовности: в каждом устройстве (контроллеры SPI, UART, I2C,...) есть
Слайд 107Прием пакета
Прерывание: событие приёма байта вызывает прерывание ядра. Данные читаются из устройства
Прием пакета
Прерывание: событие приёма байта вызывает прерывание ядра. Данные читаются из устройства
Слайд 108Прием пакета
#define PACKET_LEN 6
unsigned int rx_counter = PACKET_LEN;
unsigned char rx_buffer[PACKET_LEN];
void rx_mng(void)
{
if
Прием пакета
#define PACKET_LEN 6
unsigned int rx_counter = PACKET_LEN;
unsigned char rx_buffer[PACKET_LEN];
void rx_mng(void)
{
if
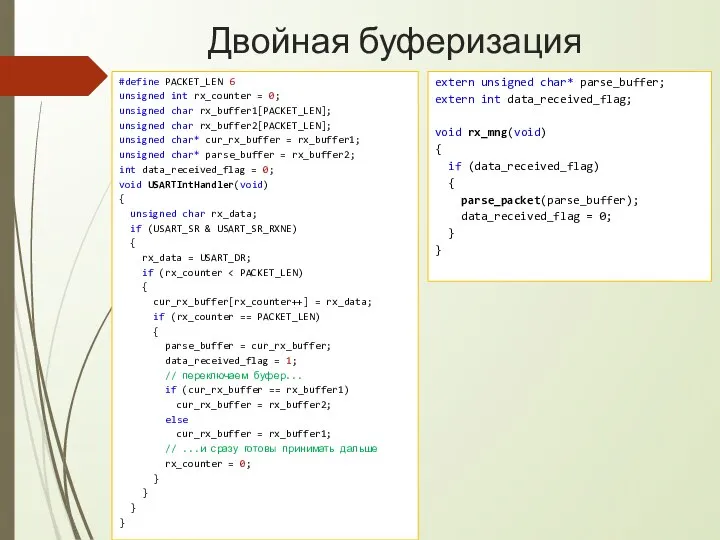
Слайд 109Двойная буферизация
Функция приема пакета
Приёмный буфер 1
Функция разбора пакета
Интерфейс
Приёмный буфер 2
Флаг «новый пакет»
Позволяет
Двойная буферизация
Функция приема пакета
Приёмный буфер 1
Функция разбора пакета
Интерфейс
Приёмный буфер 2
Флаг «новый пакет»
Позволяет

Слайд 110Двойная буферизация
#define PACKET_LEN 6
unsigned int rx_counter = 0;
unsigned char rx_buffer1[PACKET_LEN];
unsigned char rx_buffer2[PACKET_LEN];
unsigned
Двойная буферизация
#define PACKET_LEN 6
unsigned int rx_counter = 0;
unsigned char rx_buffer1[PACKET_LEN];
unsigned char rx_buffer2[PACKET_LEN];
unsigned
Слайд 111Отправка пакета
Основная задача, которая здесь решается – синхронизация быстрого ядра и медленного
Отправка пакета
Основная задача, которая здесь решается – синхронизация быстрого ядра и медленного
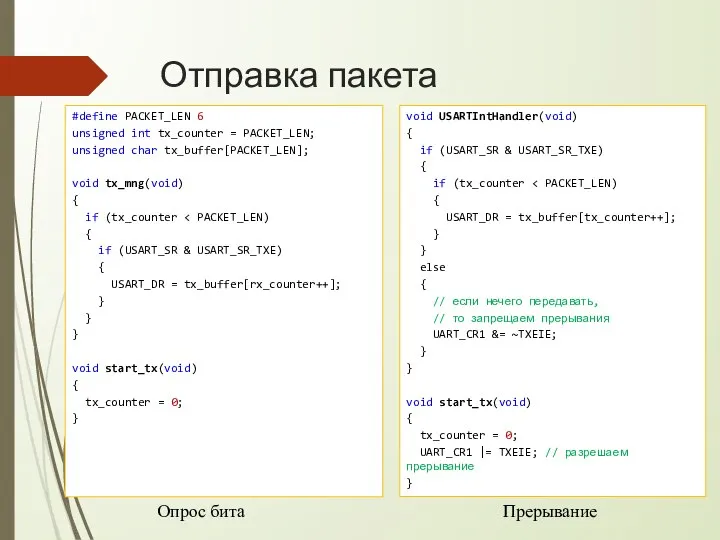
Слайд 112Отправка пакета
#define PACKET_LEN 6
unsigned int tx_counter = PACKET_LEN;
unsigned char tx_buffer[PACKET_LEN];
void tx_mng(void)
{
if
Отправка пакета
#define PACKET_LEN 6
unsigned int tx_counter = PACKET_LEN;
unsigned char tx_buffer[PACKET_LEN];
void tx_mng(void)
{
if
Слайд 113Взаимодействие систем
Взаимодействие систем
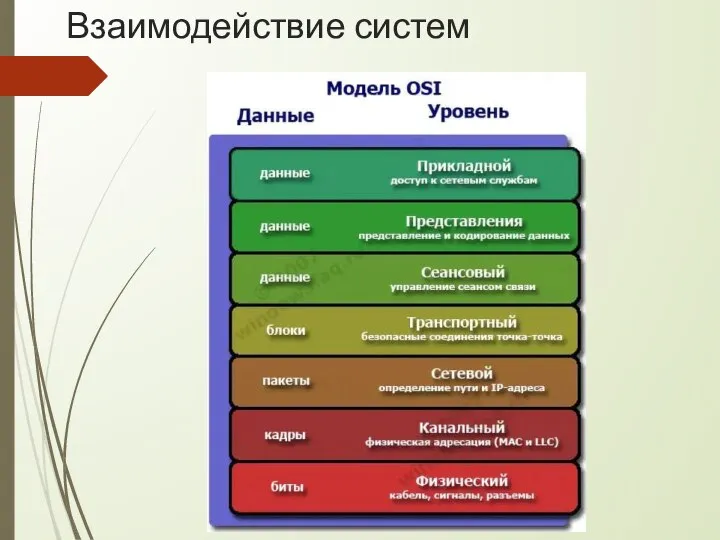
Слайд 114Взаимодействие систем
Взаимодействие систем

Слайд 115Взаимодействие систем
Взаимодействие систем

Слайд 116Упрощенный стек протоколов
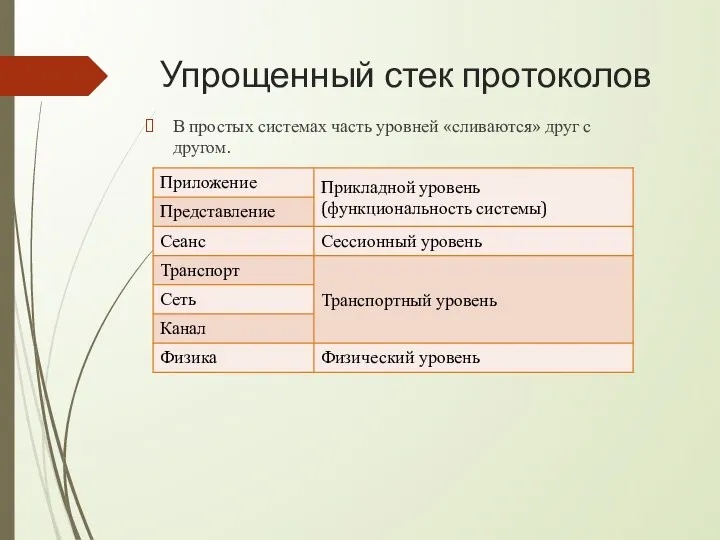
В простых системах часть уровней «сливаются» друг с другом.
Упрощенный стек протоколов
В простых системах часть уровней «сливаются» друг с другом.
Слайд 117Упрощенный стек протоколов
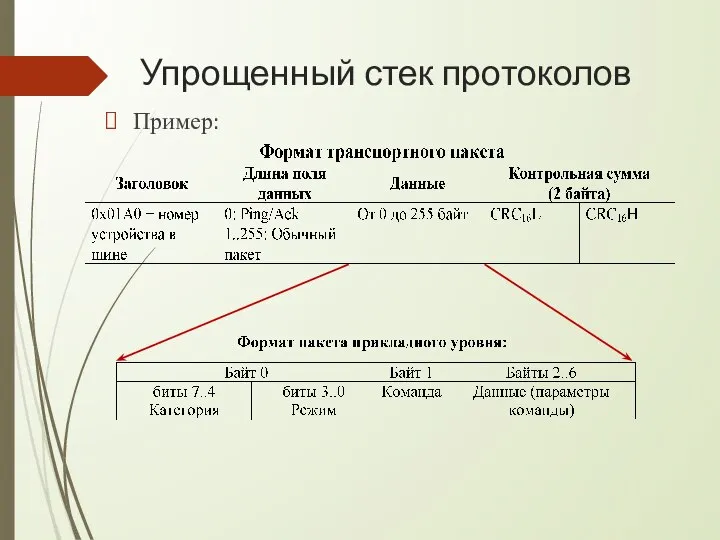
Пример:
Упрощенный стек протоколов
Пример:
Слайд 118Задачи, решаемые на разных уровнях стека
Прикладной уровень:
Поддержка основной функциональности устройства (команды, ответы
Задачи, решаемые на разных уровнях стека
Прикладной уровень:
Поддержка основной функциональности устройства (команды, ответы
Слайд 119Задачи, решаемые на разных уровнях стека: прикладной уровень
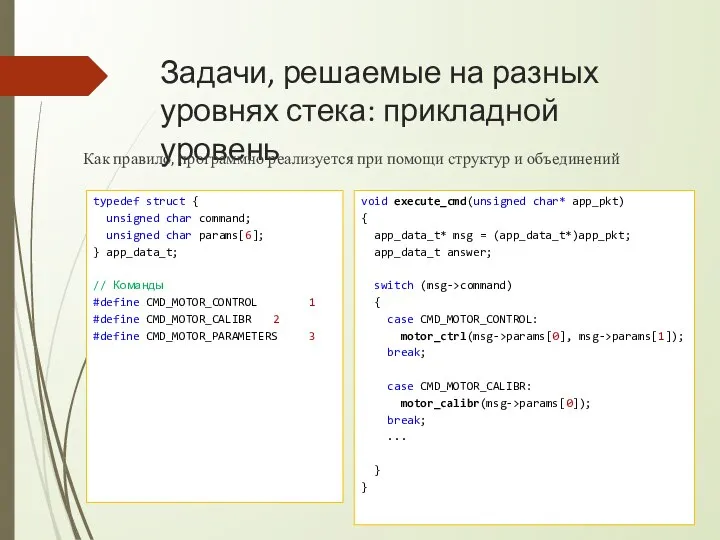
Как правило, программно реализуется при
Задачи, решаемые на разных уровнях стека: прикладной уровень
Как правило, программно реализуется при
Слайд 120Задачи, решаемые на разных уровнях стека: прикладной уровень
Как правило, программно реализуется при
Задачи, решаемые на разных уровнях стека: прикладной уровень
Как правило, программно реализуется при
Слайд 121Задачи, решаемые на разных уровнях стека: уровень сессии
Уровень сессии как самостоятельная сущность
Задачи, решаемые на разных уровнях стека: уровень сессии
Уровень сессии как самостоятельная сущность
Слайд 122Задачи, решаемые на разных уровнях стека: транспортный уровень
Синхронизация источника и приемника:
В начало
Задачи, решаемые на разных уровнях стека: транспортный уровень
Синхронизация источника и приемника:
В начало
Слайд 123Задачи, решаемые на разных уровнях стека: транспортный уровень
В итоге транспортный пакет может
Задачи, решаемые на разных уровнях стека: транспортный уровень
В итоге транспортный пакет может
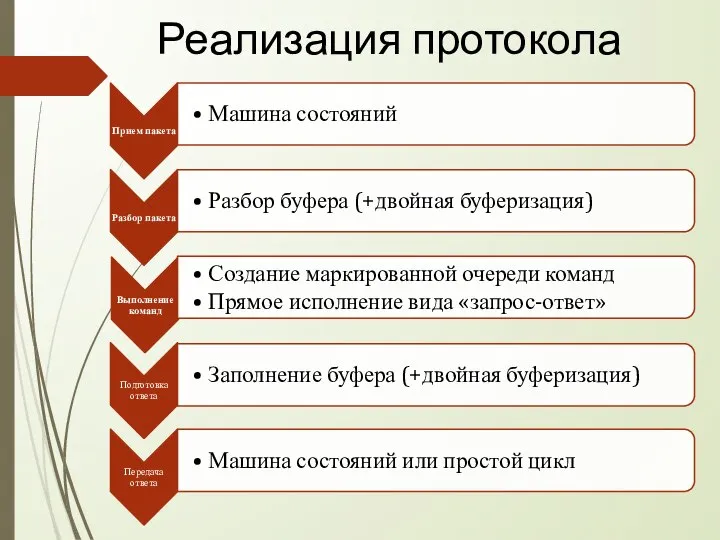
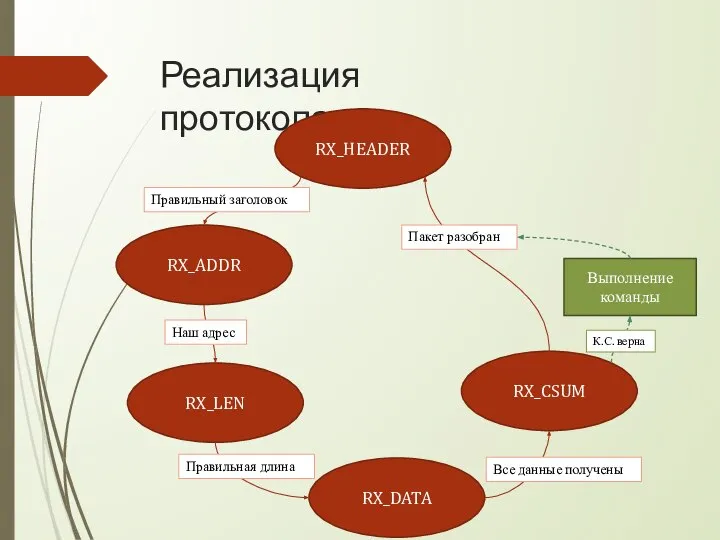
Слайд 124Реализация протокола
Реализация протокола
Слайд 125Реализация протокола
RX_HEADER
RX_ADDR
RX_LEN
RX_DATA
RX_CSUM
Правильный заголовок
Наш адрес
Правильная длина
Все данные получены
Пакет разобран
Выполнение команды
К.С. верна
Реализация протокола
RX_HEADER
RX_ADDR
RX_LEN
RX_DATA
RX_CSUM
Правильный заголовок
Наш адрес
Правильная длина
Все данные получены
Пакет разобран
Выполнение команды
К.С. верна
Похожие презентации
 дз2 (1)
дз2 (1) Остросоциальные компьютерные игры
Остросоциальные компьютерные игры Правила поведінки та безпеки в комп’ютерному класі
Правила поведінки та безпеки в комп’ютерному класі Технологии глобальной компьютерной сети Интернет
Технологии глобальной компьютерной сети Интернет SEO-копирайтинг
SEO-копирайтинг 5_Arrays_Lubchenko
5_Arrays_Lubchenko ВКР: Разработка агрегатора сервисных центров по ремонту электроники
ВКР: Разработка агрегатора сервисных центров по ремонту электроники Активация единой учетной записи для работы в РИС ТО
Активация единой учетной записи для работы в РИС ТО Криптография для школьников
Криптография для школьников Работа с электронными таблицами
Работа с электронными таблицами Использование цифровых технологий в спорте
Использование цифровых технологий в спорте Взломать сервер 1С за 15 минут
Взломать сервер 1С за 15 минут Отладка низкоуровневой программы. (Лекция 9)
Отладка низкоуровневой программы. (Лекция 9) Асимметричное шифрование
Асимметричное шифрование Структура программы в Pascal. Раздел описаний begin. Раздел операторов end
Структура программы в Pascal. Раздел описаний begin. Раздел операторов end Кибербезопасность
Кибербезопасность Создание игры в жанре платформера на языке C#, Unity
Создание игры в жанре платформера на языке C#, Unity Сборка компьютеров. Ремонт и настройка любой сложности компьютерной оргтехники
Сборка компьютеров. Ремонт и настройка любой сложности компьютерной оргтехники 9-4-3 (1)
9-4-3 (1) Школа::Кода Основы программирования на языке Python. 7 занятие
Школа::Кода Основы программирования на языке Python. 7 занятие Внедрение дополнительного кода в исполняемый файл
Внедрение дополнительного кода в исполняемый файл
 Основные методики моделирования
Основные методики моделирования Вакансии и кандидаты
Вакансии и кандидаты Операции деления
Операции деления Упаковка для геймпадов
Упаковка для геймпадов Алгоритмическая конструкция
Алгоритмическая конструкция ИТ-инфраструктура (презентация)
ИТ-инфраструктура (презентация)