- Использование метода ЛАЧХ для синтеза регуляторов манипулятора с гибким стержнем

Содержание
- 2. Актуальность работы Манипулятор с рабочим органом в виде вязкоупругого стержня – сложная комбинированная система, состоящая из
- 3. Цель работы Целью работы является исследование возможности применения метода логарифмических амплитудно-частотных характеристик для синтеза регулятора системы
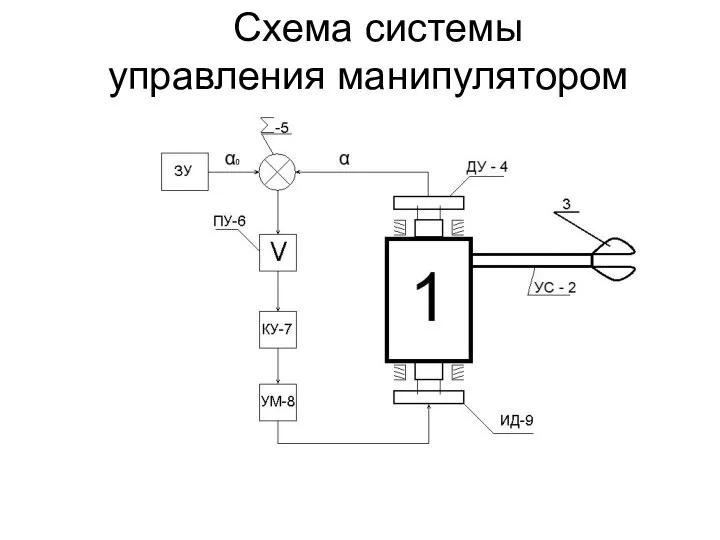
- 4. Схема системы управления манипулятором
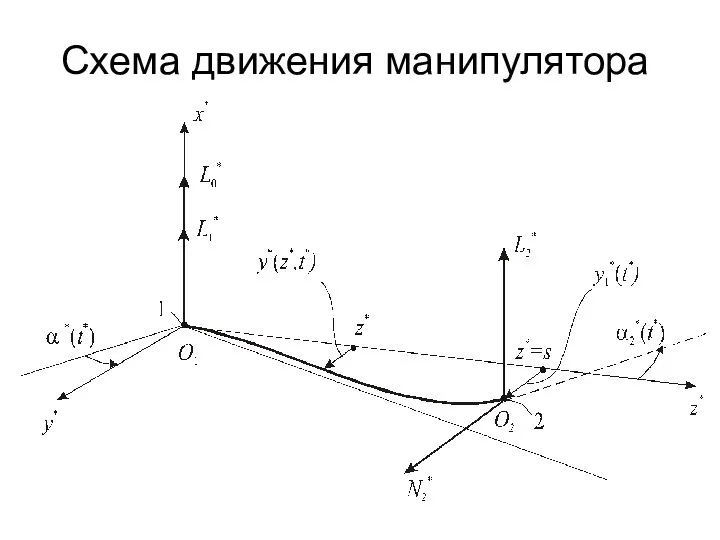
- 5. Схема движения манипулятора
- 6. Уравнения движения манипулятора в размерной форме
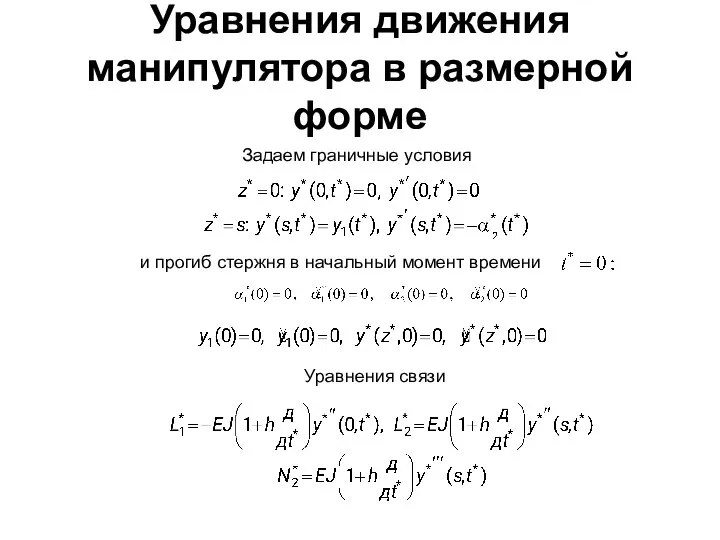
- 7. Уравнения движения манипулятора в размерной форме
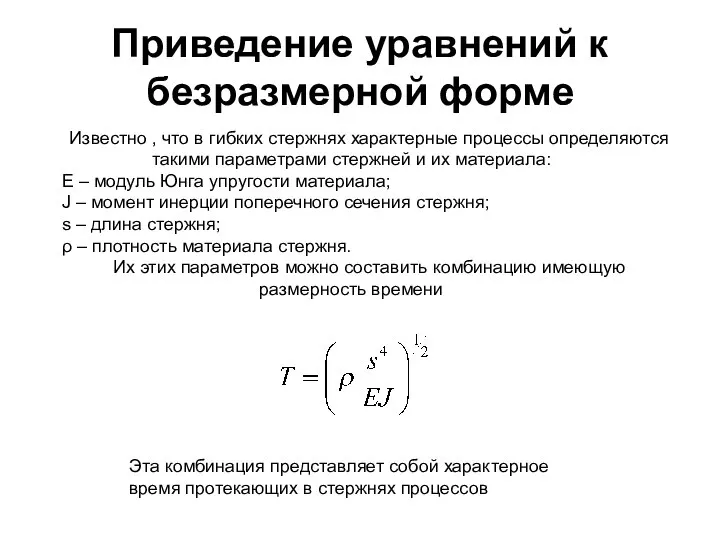
- 8. Приведение уравнений к безразмерной форме Известно , что в гибких стержнях характерные процессы определяются такими параметрами
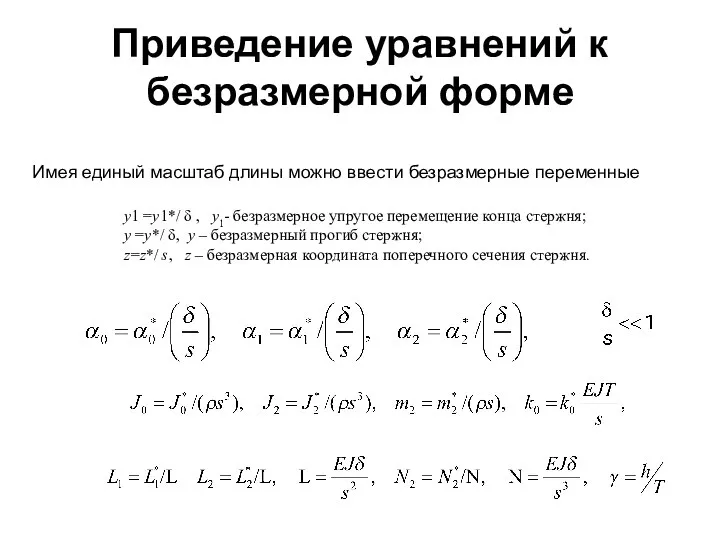
- 9. Приведение уравнений к безразмерной форме Имея единый масштаб длины можно ввести безразмерные переменные y1 =y1*/ δ
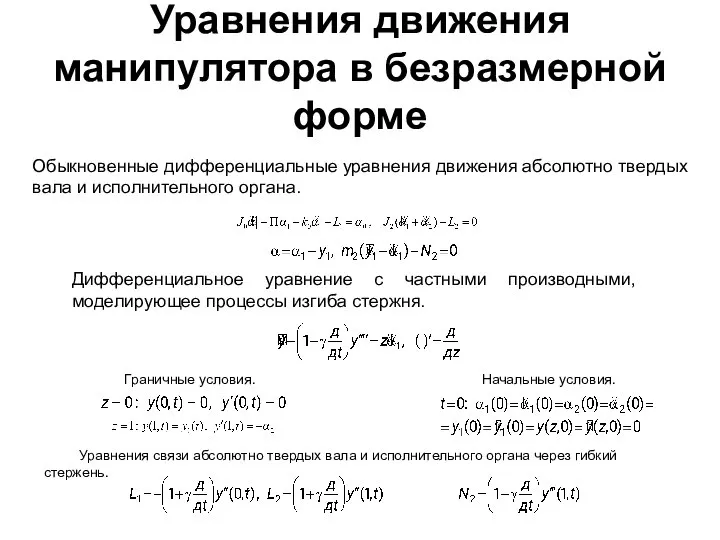
- 10. Уравнения движения манипулятора в безразмерной форме Обыкновенные дифференциальные уравнения движения абсолютно твердых вала и исполнительного органа.
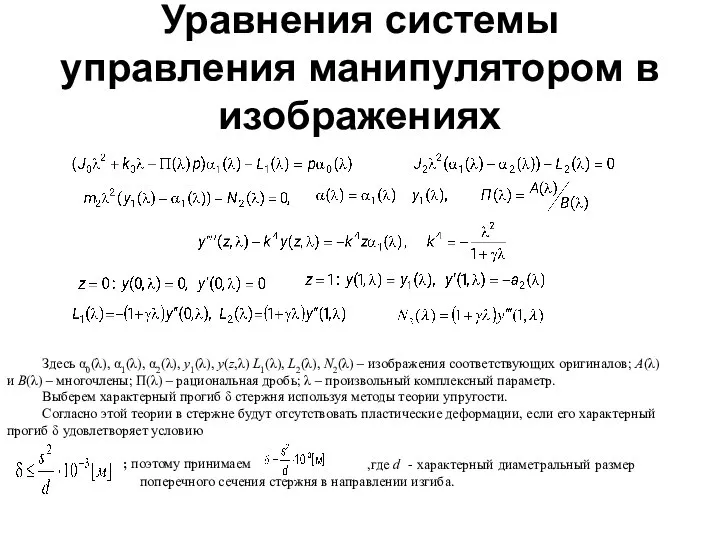
- 11. Уравнения системы управления манипулятором в изображениях
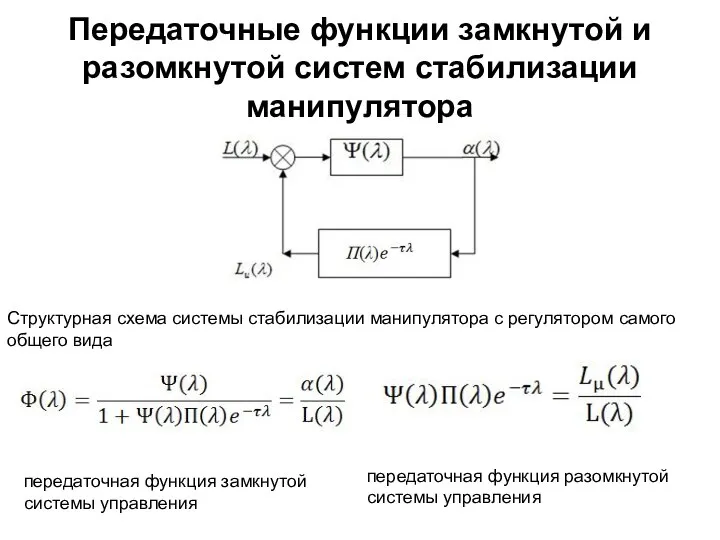
- 12. Передаточные функции замкнутой и разомкнутой систем стабилизации манипулятора Структурная схема системы стабилизации манипулятора с регулятором самого
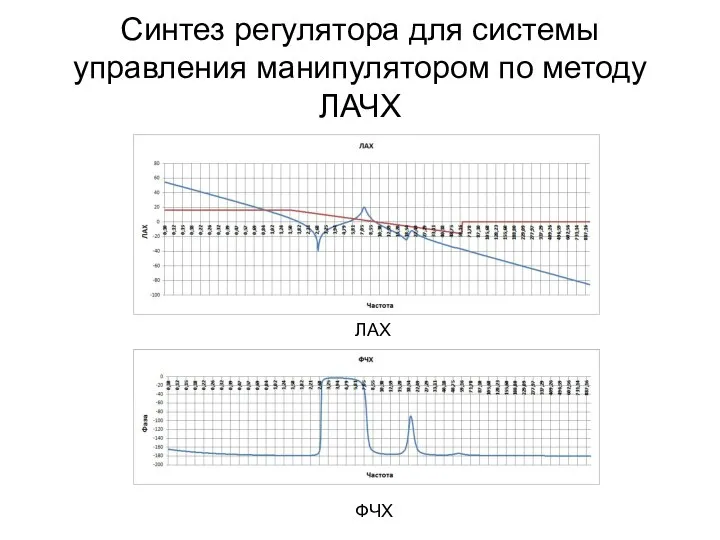
- 13. Синтез регулятора для системы управления манипулятором по методу ЛАЧХ ЛАХ ФЧХ
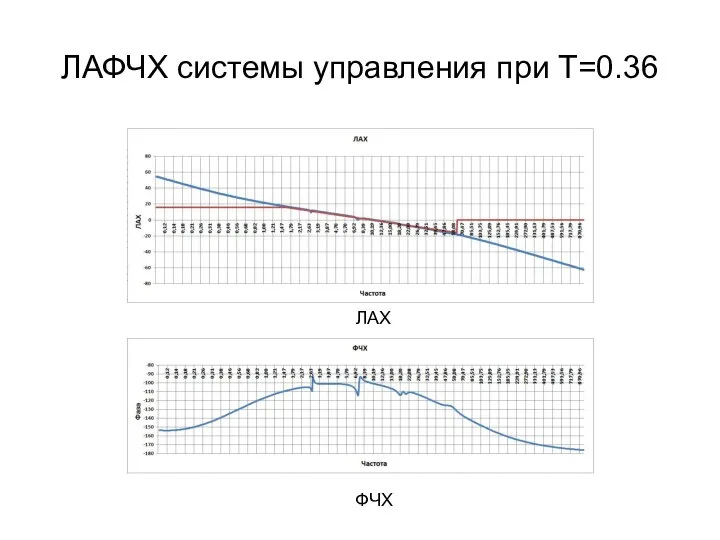
- 14. ЛАФЧХ системы управления при T=0.36 ЛАХ ФЧХ
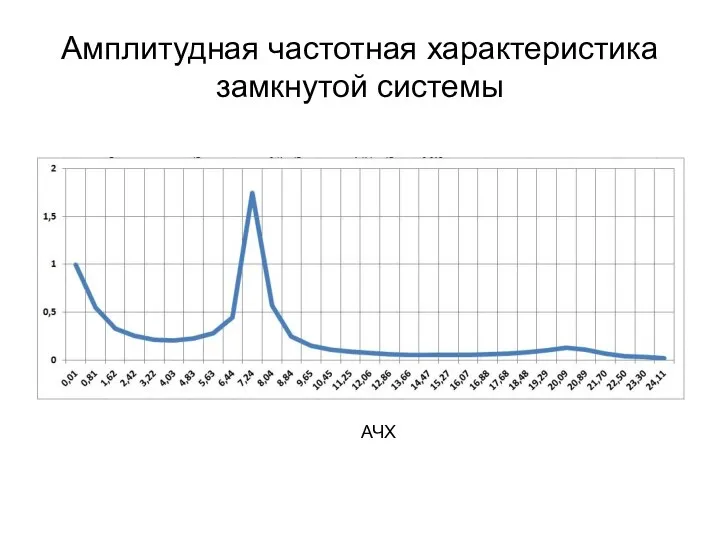
- 15. Амплитудная частотная характеристика замкнутой системы АЧХ
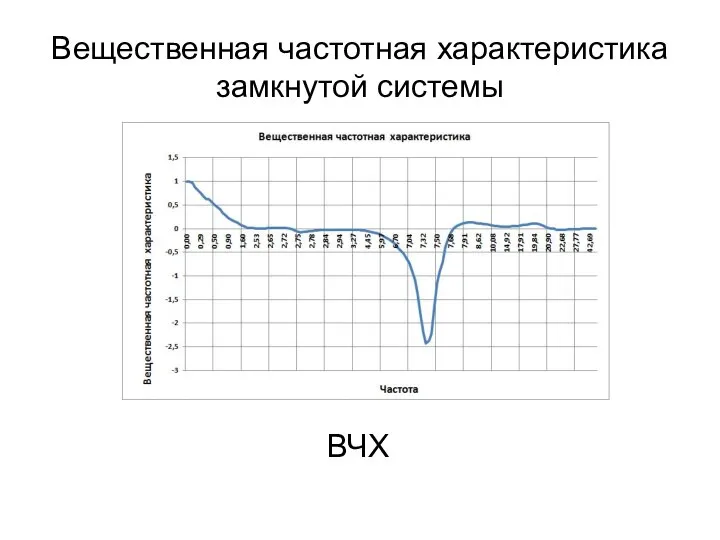
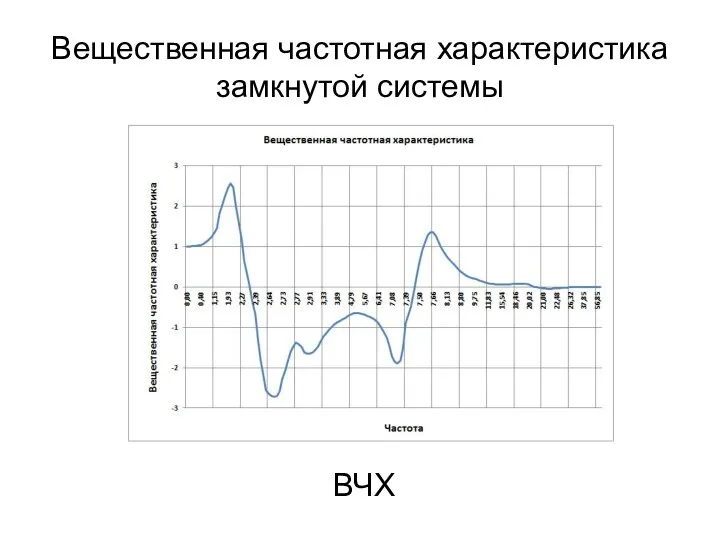
- 16. Вещественная частотная характеристика замкнутой системы ВЧХ
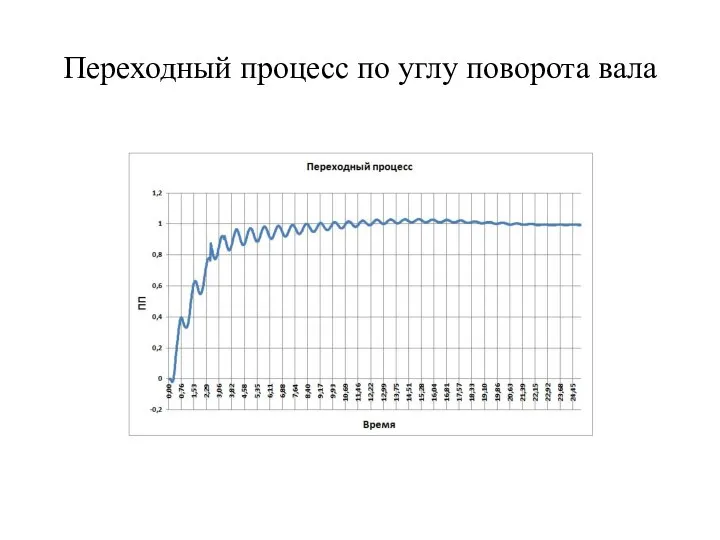
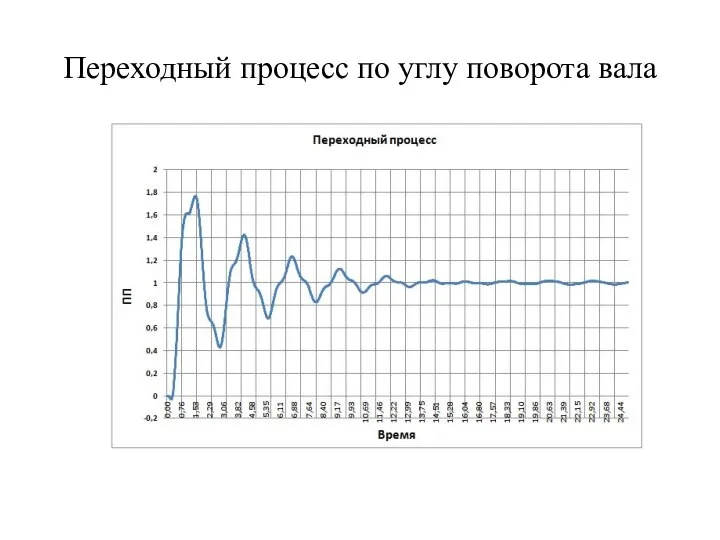
- 17. Переходный процесс по углу поворота вала
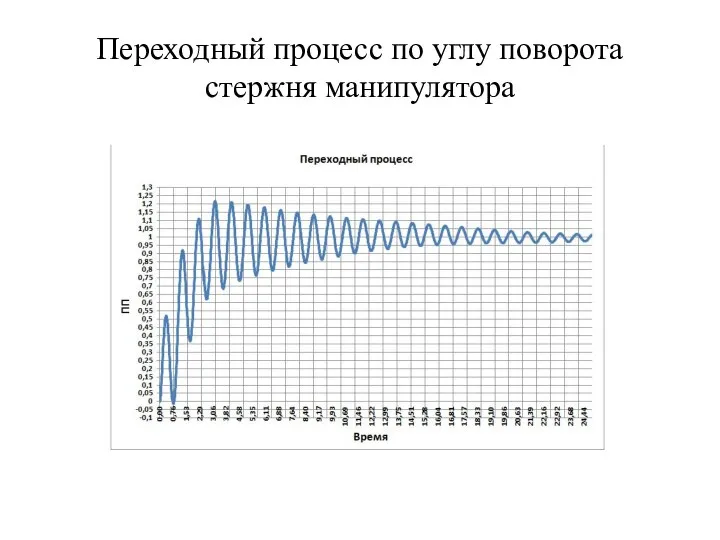
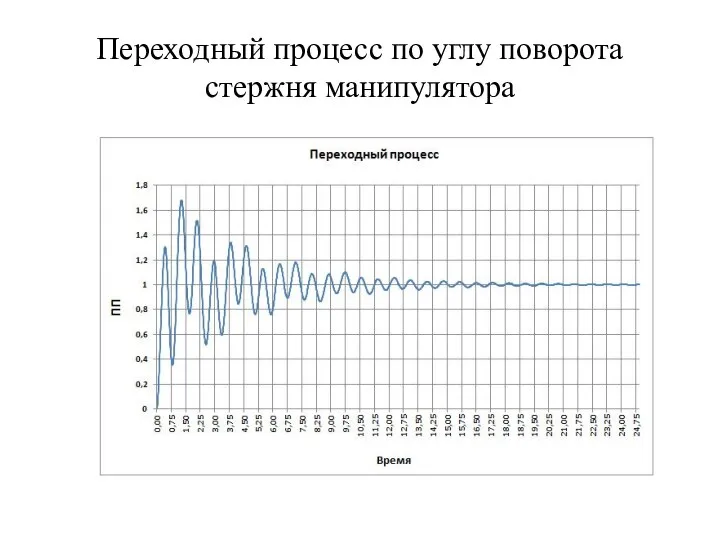
- 18. Переходный процесс по углу поворота стержня манипулятора
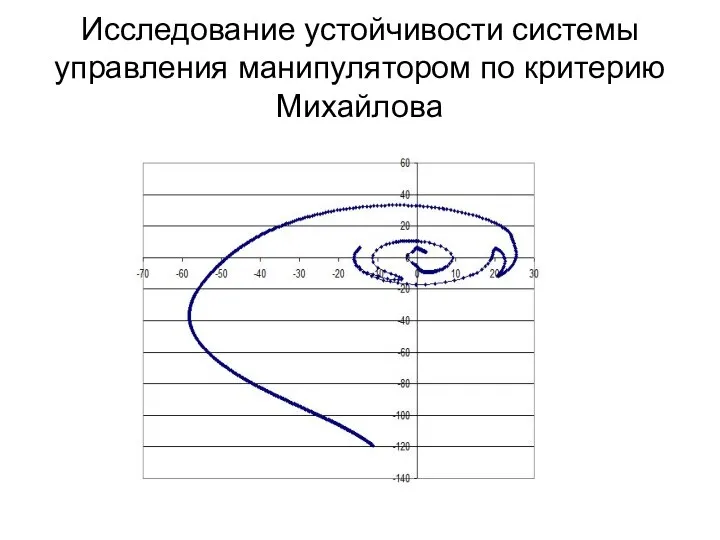
- 19. Исследование устойчивости системы управления манипулятором по критерию Михайлова
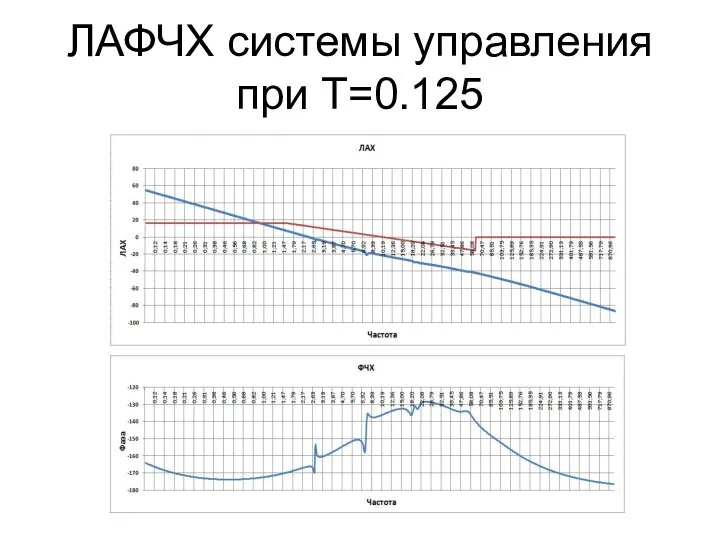
- 20. ЛАФЧХ системы управления при T=0.125
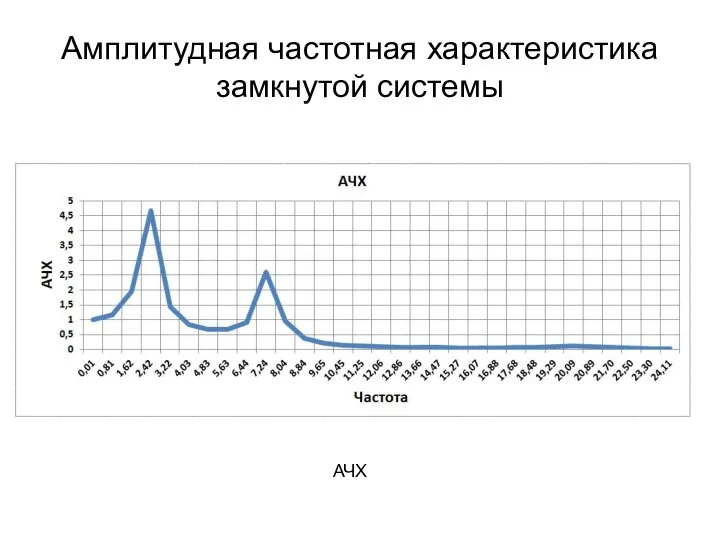
- 21. Амплитудная частотная характеристика замкнутой системы АЧХ
- 22. Вещественная частотная характеристика замкнутой системы ВЧХ
- 23. Переходный процесс по углу поворота вала
- 24. Переходный процесс по углу поворота стержня манипулятора
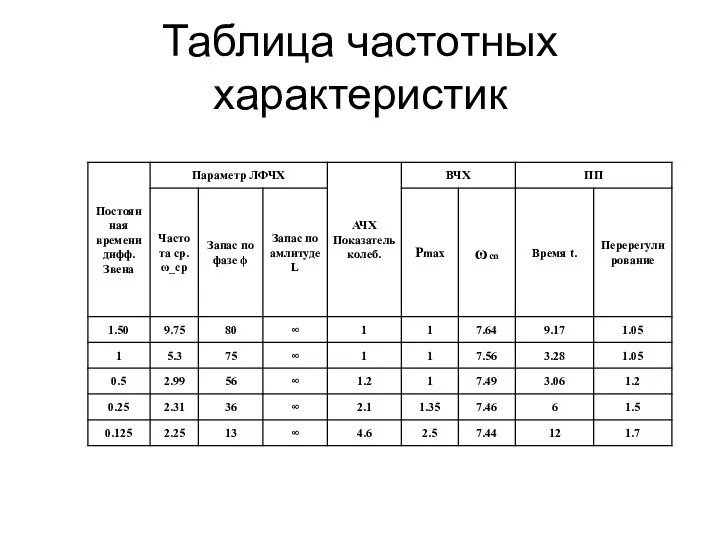
- 25. Таблица частотных характеристик
- 26. ЗАКЛЮЧЕНИЕ СФОРМУЛИРУЕМ ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ ПО ВЫПУСКНОЙ КВАЛИФИКАЦИОННОЙ РАБОТЕ: 1. Разработаны размерная и безразмерная математические
- 28. Скачать презентацию
Слайд 3Цель работы
Целью работы является исследование возможности применения метода логарифмических амплитудно-частотных характеристик
Цель работы
Целью работы является исследование возможности применения метода логарифмических амплитудно-частотных характеристик
Слайд 4 Схема системы управления манипулятором
Схема системы управления манипулятором
Слайд 5Схема движения манипулятора
Схема движения манипулятора
Слайд 6Уравнения движения манипулятора в размерной форме
Уравнения движения манипулятора в размерной форме
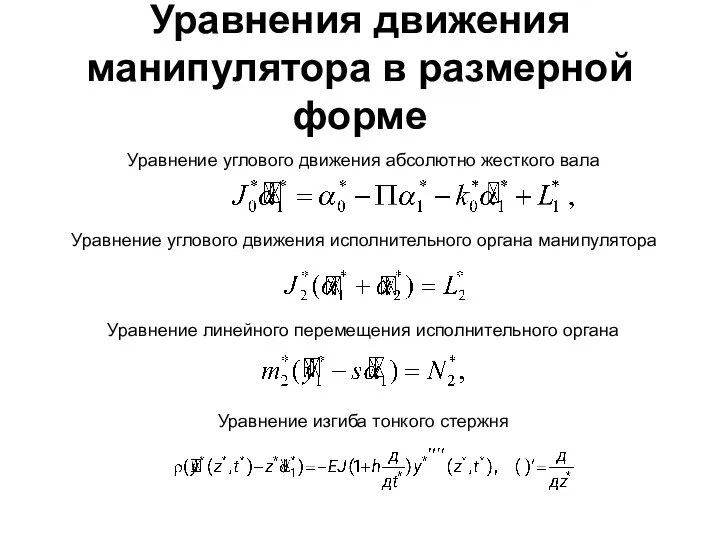
Слайд 7Уравнения движения манипулятора в размерной форме
Уравнения движения манипулятора в размерной форме
Слайд 8Приведение уравнений к безразмерной форме
Известно , что в гибких стержнях характерные процессы
Приведение уравнений к безразмерной форме
Известно , что в гибких стержнях характерные процессы
Слайд 9Приведение уравнений к безразмерной форме
Имея единый масштаб длины можно ввести безразмерные
Приведение уравнений к безразмерной форме
Имея единый масштаб длины можно ввести безразмерные
Слайд 10Уравнения движения манипулятора в безразмерной форме
Обыкновенные дифференциальные уравнения движения абсолютно твердых вала
Уравнения движения манипулятора в безразмерной форме
Обыкновенные дифференциальные уравнения движения абсолютно твердых вала
Слайд 11Уравнения системы управления манипулятором в изображениях
Уравнения системы управления манипулятором в изображениях
Слайд 12Передаточные функции замкнутой и разомкнутой систем стабилизации манипулятора
Структурная схема системы стабилизации манипулятора
Передаточные функции замкнутой и разомкнутой систем стабилизации манипулятора
Структурная схема системы стабилизации манипулятора
Слайд 13Синтез регулятора для системы управления манипулятором по методу ЛАЧХ
ЛАХ
ФЧХ
Синтез регулятора для системы управления манипулятором по методу ЛАЧХ
ЛАХ
ФЧХ
Слайд 14ЛАФЧХ системы управления при T=0.36
ЛАХ
ФЧХ
ЛАФЧХ системы управления при T=0.36
ЛАХ
ФЧХ
Слайд 15Амплитудная частотная характеристика замкнутой системы
АЧХ
Амплитудная частотная характеристика замкнутой системы
АЧХ
Слайд 16Вещественная частотная характеристика замкнутой системы
ВЧХ
Вещественная частотная характеристика замкнутой системы
ВЧХ
Слайд 17Переходный процесс по углу поворота вала
Переходный процесс по углу поворота вала
Слайд 18Переходный процесс по углу поворота стержня манипулятора
Переходный процесс по углу поворота стержня манипулятора
Слайд 19Исследование устойчивости системы управления манипулятором по критерию Михайлова
Исследование устойчивости системы управления манипулятором по критерию Михайлова
Слайд 20ЛАФЧХ системы управления при T=0.125
ЛАФЧХ системы управления при T=0.125
Слайд 21Амплитудная частотная характеристика замкнутой системы
АЧХ
Амплитудная частотная характеристика замкнутой системы
АЧХ
Слайд 22Вещественная частотная характеристика замкнутой системы
ВЧХ
Вещественная частотная характеристика замкнутой системы
ВЧХ
Слайд 23Переходный процесс по углу поворота вала
Переходный процесс по углу поворота вала
Слайд 24Переходный процесс по углу поворота стержня манипулятора
Переходный процесс по углу поворота стержня манипулятора
Слайд 25Таблица частотных характеристик
Таблица частотных характеристик
Слайд 26ЗАКЛЮЧЕНИЕ
СФОРМУЛИРУЕМ ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ ПО ВЫПУСКНОЙ КВАЛИФИКАЦИОННОЙ РАБОТЕ:
1. Разработаны размерная и
ЗАКЛЮЧЕНИЕ
СФОРМУЛИРУЕМ ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ ПО ВЫПУСКНОЙ КВАЛИФИКАЦИОННОЙ РАБОТЕ:
1. Разработаны размерная и
 Кратные числа
Кратные числа Понятие теории игр
Понятие теории игр Умножение - 3
Умножение - 3 Многогранник с двумя основаниями
Многогранник с двумя основаниями Презентация на тему Решаем задачи 1 класс
Презентация на тему Решаем задачи 1 класс  Дизъюнктивные нормальные формы (ДНФ). СДНФ
Дизъюнктивные нормальные формы (ДНФ). СДНФ Презентация на тему Преобразование графиков функций на координатной плоскости
Презентация на тему Преобразование графиков функций на координатной плоскости  Математические ребусы. 6 класс
Математические ребусы. 6 класс Домашнее задание . Подготовка к контрольной работе
Домашнее задание . Подготовка к контрольной работе Строительство бакалавриата. Приложения производной
Строительство бакалавриата. Приложения производной Элементы комбинаторики
Элементы комбинаторики Системы обыкновенных дифференциальных уравнений
Системы обыкновенных дифференциальных уравнений Презентация на тему ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ
Презентация на тему ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ  Сложение отрицательных чисел
Сложение отрицательных чисел Состав числа в пределах 10; Компоненты задачи
Состав числа в пределах 10; Компоненты задачи Презентация на тему КООРДИНАТНАЯ ПЛОСКОСТЬ (6 КЛАСС)
Презентация на тему КООРДИНАТНАЯ ПЛОСКОСТЬ (6 КЛАСС)  Движение: скорость, время, расстояние
Движение: скорость, время, расстояние Перпендикулярности прямой и плоскости
Перпендикулярности прямой и плоскости Письменное вычитание с переходом через десяток в случаях: 50 - 24
Письменное вычитание с переходом через десяток в случаях: 50 - 24 График функции. Тест, 1-6 варианты
График функции. Тест, 1-6 варианты Задачи на построение
Задачи на построение Методы решения оптимизационных задач
Методы решения оптимизационных задач Сравнение групп предметов. Свойства предметов (1 класс)
Сравнение групп предметов. Свойства предметов (1 класс) Случаи сложения вида +5
Случаи сложения вида +5 Второй признак равенства треугольников по стороне и двум прилежащим к ней углам
Второй признак равенства треугольников по стороне и двум прилежащим к ней углам Факториал
Факториал Проекции вектора на оси координат
Проекции вектора на оси координат Зачетная система в старших классах как средство предупреждения неуспеваемости
Зачетная система в старших классах как средство предупреждения неуспеваемости