Презентация по математике "Алгоритмы внутренних точек с приближенным решением вспомогательной задачи" -
- Презентация по математике "Алгоритмы внутренних точек с приближенным решением вспомогательной задачи" -

Содержание
- 2. 1939 – линейное программирование (Канторович). 1947 – симплекс-метод (Данциг). 1967 – метод внутренних точек (Дикин). 1984
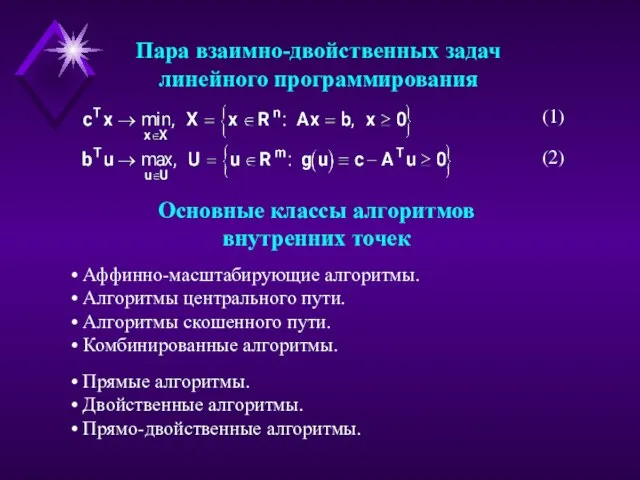
- 3. Основные классы алгоритмов внутренних точек (1) (2) Пара взаимно-двойственных задач линейного программирования Аффинно-масштабирующие алгоритмы. Алгоритмы центрального
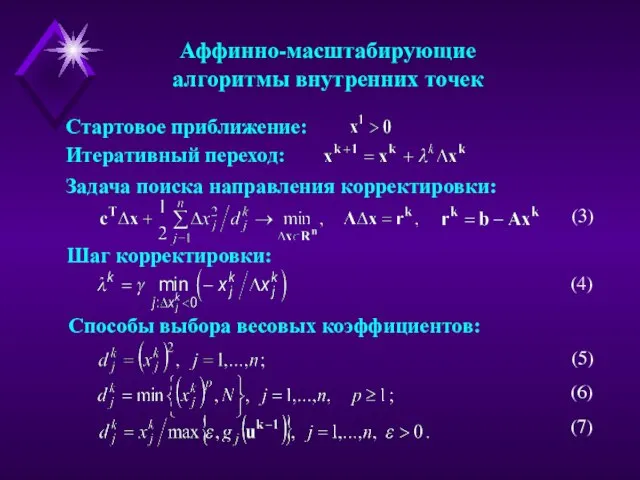
- 4. Аффинно-масштабирующие алгоритмы внутренних точек Стартовое приближение: Итеративный переход: Задача поиска направления корректировки: Шаг корректировки: (3) Способы
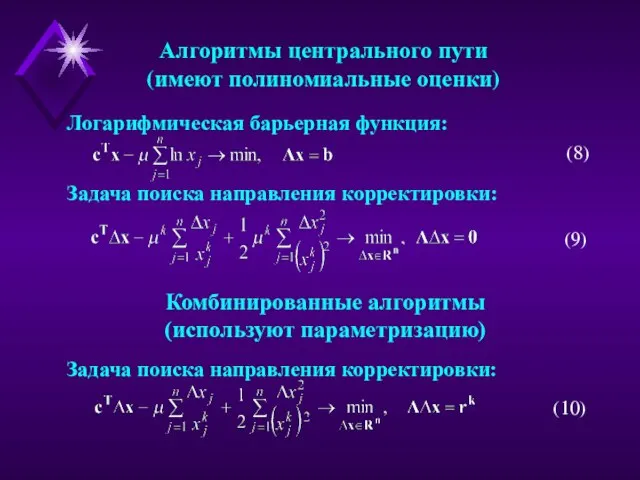
- 5. Алгоритмы центрального пути (имеют полиномиальные оценки) Логарифмическая барьерная функция: (8) Задача поиска направления корректировки: Комбинированные алгоритмы
- 6. Решение вспомогательной задачи Аффинно-масштабирующие алгоритмы: Алгоритмы центрального пути: Комбинированные алгоритмы: (11) (12) (13) (14) (17) (18)
- 7. Методы решения вспомогательной задачи Метод Гаусса. Метод Халецкого (метод квадратного корня). Метод сопряженных направлений. Метод Зейделя.
- 8. Метод сопряженных направлений Направление корректировки: Шаг, определяющий вариант метода: Итеративный переход: Шаг корректировки:
- 9. Экспериментальное исследование Число итераций, необходимое для решения задач при n=1,2m Число итераций, необходимое для решения задач
- 10. Параметры управления алгоритмом Вариант приближенного метода. ε – параметр в условии останова δ – параметр в
- 12. Скачать презентацию
Слайд 21939 – линейное программирование (Канторович).
1947 – симплекс-метод (Данциг).
1967 – метод внутренних точек
1939 – линейное программирование (Канторович).
1947 – симплекс-метод (Данциг).
1967 – метод внутренних точек
Слайд 3Основные классы алгоритмов
внутренних точек
(1)
(2)
Пара взаимно-двойственных задач
линейного программирования
Аффинно-масштабирующие алгоритмы.
Алгоритмы центрального пути.
Основные классы алгоритмов
внутренних точек
(1)
(2)
Пара взаимно-двойственных задач
линейного программирования
Аффинно-масштабирующие алгоритмы.
Алгоритмы центрального пути.
Слайд 4Аффинно-масштабирующие
алгоритмы внутренних точек
Стартовое приближение:
Итеративный переход:
Задача поиска направления корректировки:
Шаг корректировки:
(3)
Способы выбора весовых коэффициентов:
(4)
(5)
(6)
(7)
Аффинно-масштабирующие
алгоритмы внутренних точек
Стартовое приближение:
Итеративный переход:
Задача поиска направления корректировки:
Шаг корректировки:
(3)
Способы выбора весовых коэффициентов:
(4)
(5)
(6)
(7)
Слайд 5Алгоритмы центрального пути
(имеют полиномиальные оценки)
Логарифмическая барьерная функция:
(8)
Задача поиска направления корректировки:
Комбинированные алгоритмы
(используют параметризацию)
(10)
(9)
Задача
Алгоритмы центрального пути
(имеют полиномиальные оценки)
Логарифмическая барьерная функция:
(8)
Задача поиска направления корректировки:
Комбинированные алгоритмы
(используют параметризацию)
(10)
(9)
Задача
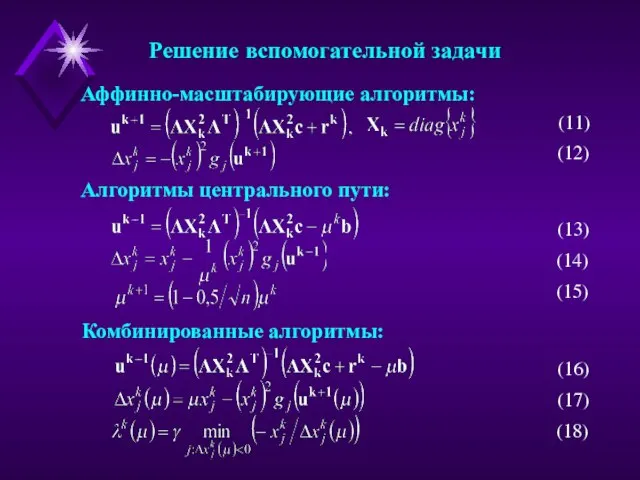
Слайд 6Решение вспомогательной задачи
Аффинно-масштабирующие алгоритмы:
Алгоритмы центрального пути:
Комбинированные алгоритмы:
(11)
(12)
(13)
(14)
(17)
(18)
(15)
(16)
Решение вспомогательной задачи
Аффинно-масштабирующие алгоритмы:
Алгоритмы центрального пути:
Комбинированные алгоритмы:
(11)
(12)
(13)
(14)
(17)
(18)
(15)
(16)
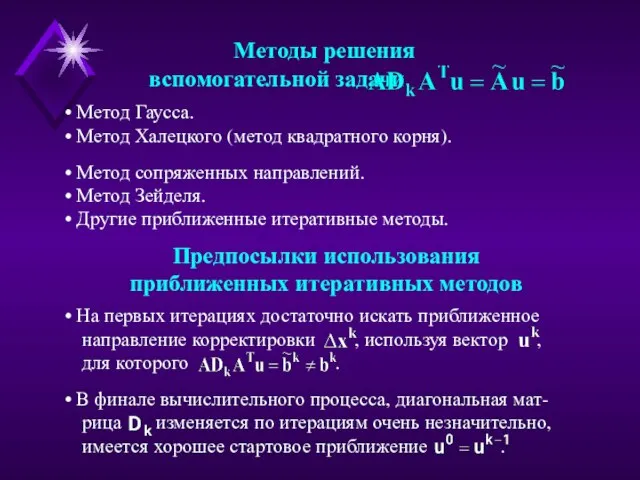
Слайд 7Методы решения
вспомогательной задачи
Метод Гаусса.
Метод Халецкого (метод квадратного корня).
Метод сопряженных
Методы решения
вспомогательной задачи
Метод Гаусса.
Метод Халецкого (метод квадратного корня).
Метод сопряженных
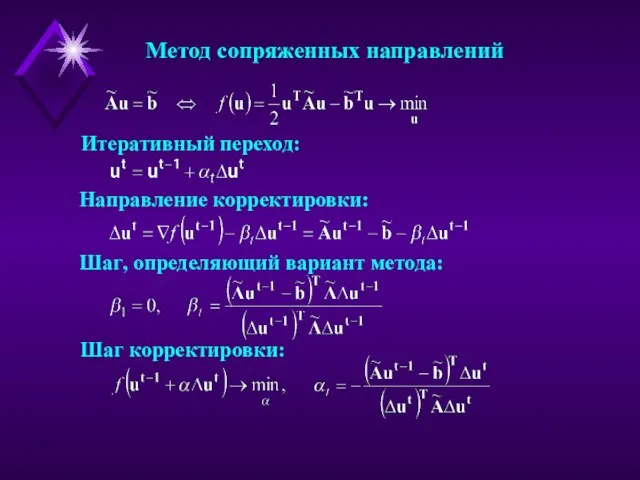
Слайд 8Метод сопряженных направлений
Направление корректировки:
Шаг, определяющий вариант метода:
Итеративный переход:
Шаг корректировки:
Метод сопряженных направлений
Направление корректировки:
Шаг, определяющий вариант метода:
Итеративный переход:
Шаг корректировки:
Слайд 9Экспериментальное исследование
Число итераций, необходимое для решения задач при n=1,2m
Число итераций, необходимое для
Экспериментальное исследование
Число итераций, необходимое для решения задач при n=1,2m
Число итераций, необходимое для

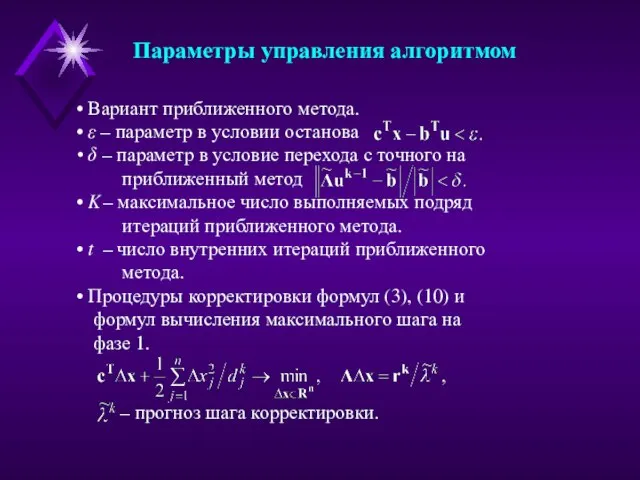
Слайд 10Параметры управления алгоритмом
Вариант приближенного метода.
ε – параметр в условии останова
Параметры управления алгоритмом
Вариант приближенного метода.
ε – параметр в условии останова
 Уравнение окружности. 2 урок
Уравнение окружности. 2 урок Решение задач. Урок 22
Решение задач. Урок 22 Развитие логико–математических представлений как основы познавательной мотивации
Развитие логико–математических представлений как основы познавательной мотивации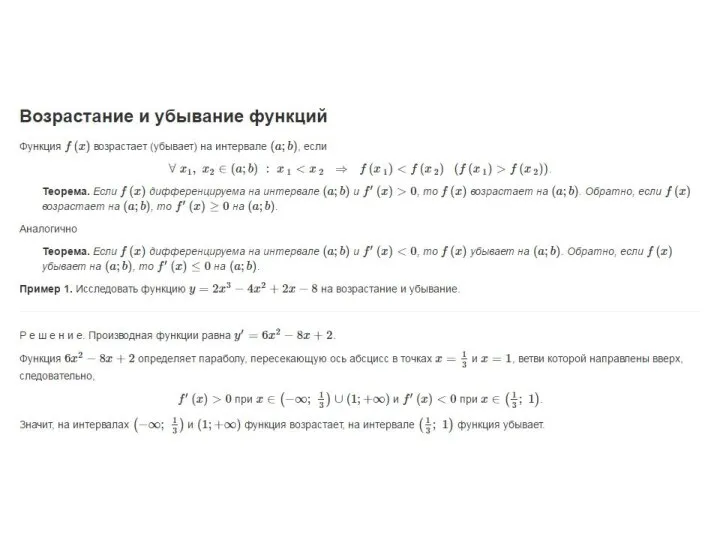 Возрастание и убывание функций
Возрастание и убывание функций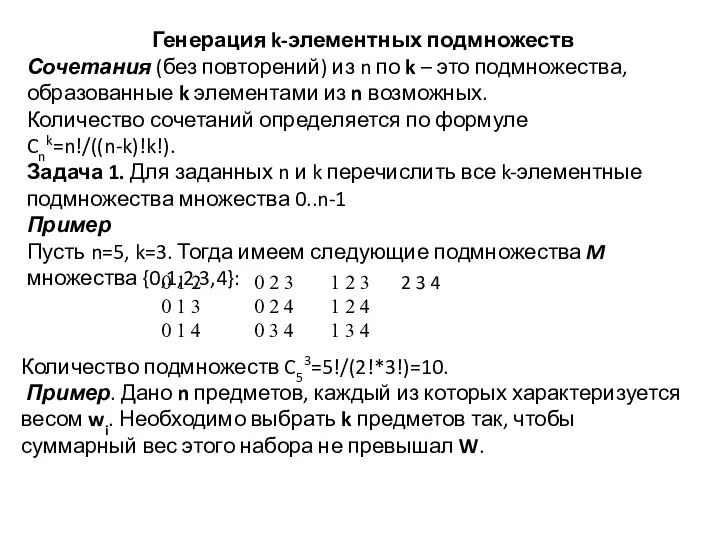 Генерация k-элементных подмножеств
Генерация k-элементных подмножеств Matematika_5_klass_21_09_Chtenie_i_zapis_naturalnykh_chisel (1)
Matematika_5_klass_21_09_Chtenie_i_zapis_naturalnykh_chisel (1) Сфера и шар
Сфера и шар Как возникло слово математика
Как возникло слово математика Решение систем неравенств с одной переменной
Решение систем неравенств с одной переменной Формулы половинного аргумента
Формулы половинного аргумента Перевертыши. Головоломки
Перевертыши. Головоломки Частотная таблица
Частотная таблица Объём произвольного тела вращения
Объём произвольного тела вращения Среднее арифметическое. Задачи
Среднее арифметическое. Задачи урок 1,2 по геометрии 11 класс 6 сентября 2022
урок 1,2 по геометрии 11 класс 6 сентября 2022 Показательные уравнения и неравенства
Показательные уравнения и неравенства координаты векторов
координаты векторов Геометрия. Планиметрия
Геометрия. Планиметрия Цилиндр
Цилиндр Игра Счастливый случай. Внеклассное мероприятие по математике
Игра Счастливый случай. Внеклассное мероприятие по математике Правило нахождения первообразной
Правило нахождения первообразной Сферические объекты
Сферические объекты Интерактивная игра Занимательная математика
Интерактивная игра Занимательная математика Решение уравнений в целых числах
Решение уравнений в целых числах Тождественные преобразования рациональных выражений
Тождественные преобразования рациональных выражений Тригонометрические неравенства Слайды для урока по теме:
Тригонометрические неравенства Слайды для урока по теме: Параллельные прямые. Задачи для подготовки к контрольной работе
Параллельные прямые. Задачи для подготовки к контрольной работе Угол между прямой и плоскостью. Теорема о трёх перпендикулярах
Угол между прямой и плоскостью. Теорема о трёх перпендикулярах