- Sistēmu vadība (2.daļa)

Содержание
- 2. Slēgta kontūra vadības sistēmas Slēgta kontūra vadības sistēmā tiek nodalītas detektora, salīdzinātāja un izpildmehānisma funkcijas un
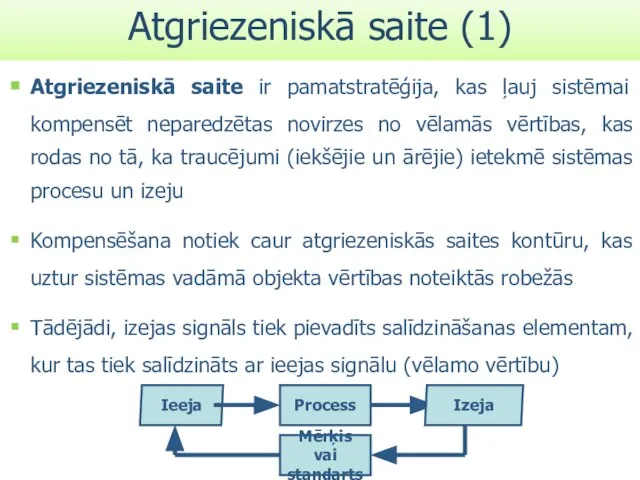
- 3. Atgriezeniskā saite (1) Atgriezeniskā saite ir pamatstratēģija, kas ļauj sistēmai kompensēt neparedzētas novirzes no vēlamās vērtības,
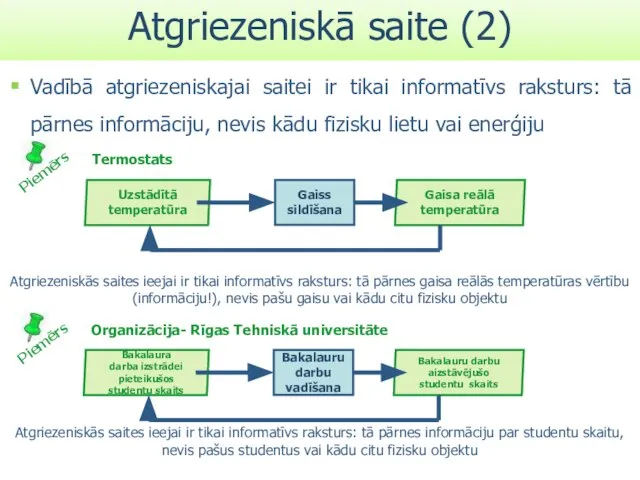
- 4. Vadībā atgriezeniskajai saitei ir tikai informatīvs raksturs: tā pārnes informāciju, nevis kādu fizisku lietu vai enerģiju
- 5. Atgriezeniskā saite kā kontroles mehānisms darbojas, pamatojoties vairāk uz pašreizējo nekā uz paredzamo darbību Atgriezeniskā saite
- 6. Pozitīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā, regulējot jaunu izeju tā,
- 7. Tādējādi, vārds „pozitīvs” atgriezeniskās saites definīcijā nemaz nenozīmē, ka atgriezeniskās saites sekas ir vēlamas. Tas drīzāk
- 8. Tādējādi, pozitīva atgriezeniskā saite ir pārejoša parādība, tā nevar pastāvēt bezgalīgi ilgi. Pretējā gadījumā galu galā
- 9. Bioloģijā pozitīvas atgriezeniskās saites piemērs ir asins sarecēšanas process. Atgriezeniskās saites kontūrs tiek realizēts tad, kad
- 10. Negatīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā, regulējot jaunu izeju tā,
- 11. Negatīva atgriezeniskā saite ir vadību uzturoša, un tā var pastāvēt ilgtermiņā Negatīva atgriezeniskā saite ir vērsta
- 12. Negatīvas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra ir ieejas signāls, kas
- 13. No vienas puses negatīva atgriezeniskā saite nodrošina jebkuru traucējumu kompensēšanu, tādēļ ka atgriezeniskajai saitei nekas nav
- 14. Attiecībā uz negatīvu atgriezenisko saiti var izdalīt: Pirmās kārtas atgriezenisko saiti Otrās kārtas atgriezenisko saiti Trešās
- 15. Pirmās kārtas atgriezeniskās saites sistēmas var tikt arī nosauktas par sistēmām ar automātisku mērķu sasniegšanu Realizējot
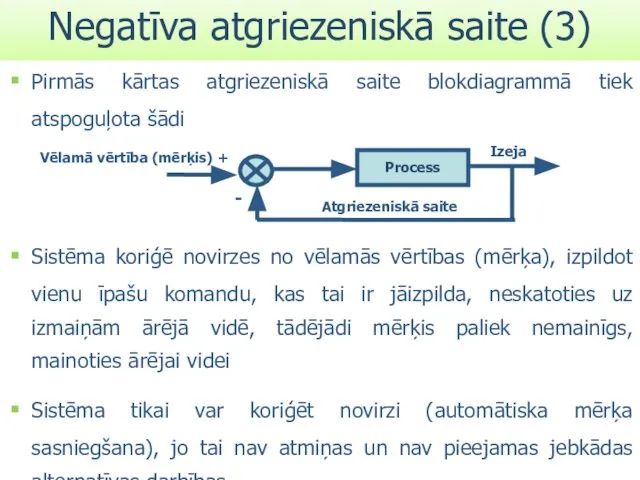
- 16. Pirmās kārtas atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi Sistēma koriģē novirzes no vēlamās vērtības (mērķa), izpildot
- 17. Mērķis: uzturēt uzdoto istabas temperatūru, piemēram, 24oC Komanda: ieslēgt/izslēgt sildelementu gadījumā, ja temperatūra atšķiras no uzstādītā
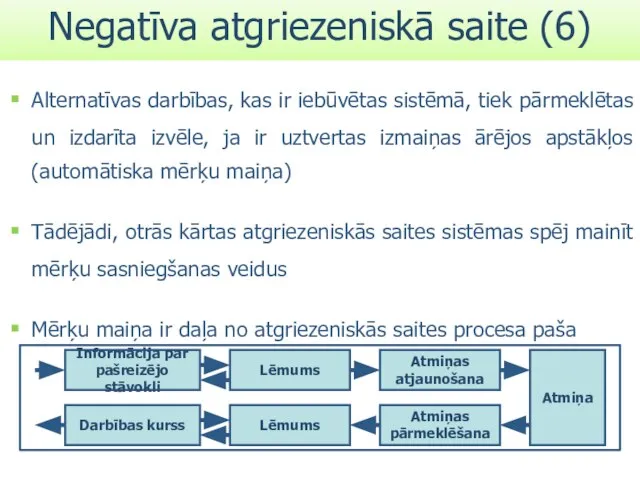
- 18. Otrās kārtas atgriezeniskās saites sistēmas var tikt nosauktas par sistēmām ar automātisku mērķu maiņu Šīm sistēmām
- 19. Alternatīvas darbības, kas ir iebūvētas sistēmā, tiek pārmeklētas un izdarīta izvēle, ja ir uztvertas izmaiņas ārējos
- 20. Pagātnes informācija tiek izmantota lēmumu pieņemšanai tagadnē Ja sistēmai nav pieejama pagātnes informācija, vai tā vairs
- 21. Atmiņa: kopējais kanālu skaits, kanālu statuss (brīvs vai nav brīvs) Mērķis: savienot, izmantojot 1. kanālu Tiek
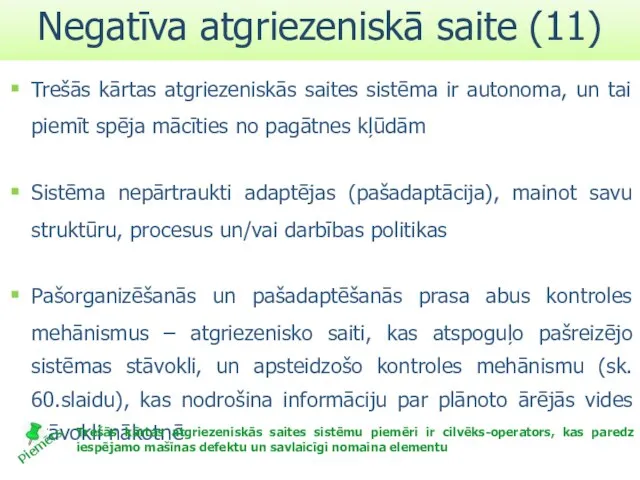
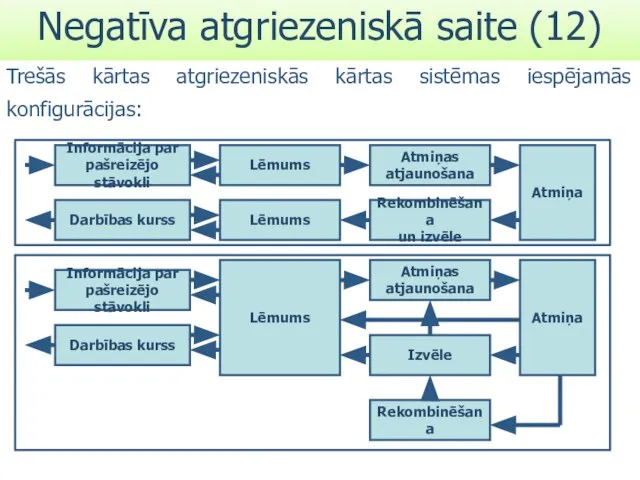
- 22. Trešās kārtas atgriezeniskās saites sistēmas atspoguļo savus pagātnes lēmumus (domājošs mērķu mainītājs) Trešās kārtas atgriezeniskās saites
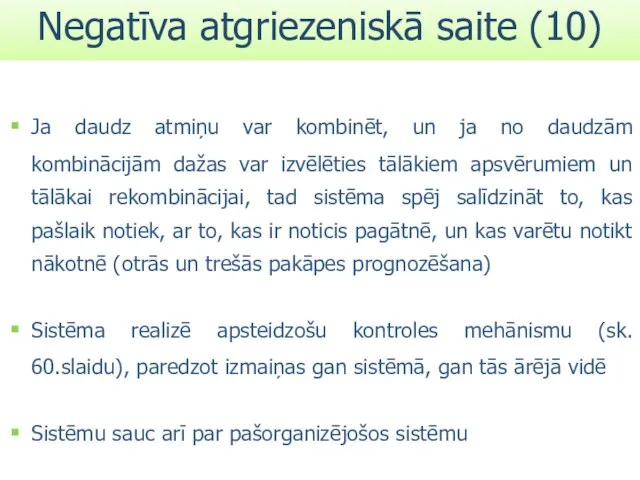
- 23. Ja daudz atmiņu var kombinēt, un ja no daudzām kombinācijām dažas var izvēlēties tālākiem apsvērumiem un
- 24. Trešās kārtas atgriezeniskās saites sistēma ir autonoma, un tai piemīt spēja mācīties no pagātnes kļūdām Sistēma
- 25. Negatīva atgriezeniskā saite (12) Informācija par pašreizējo stāvokli Lēmums Atmiņas atjaunošana Rekombinēšana un izvēle Lēmums Darbības
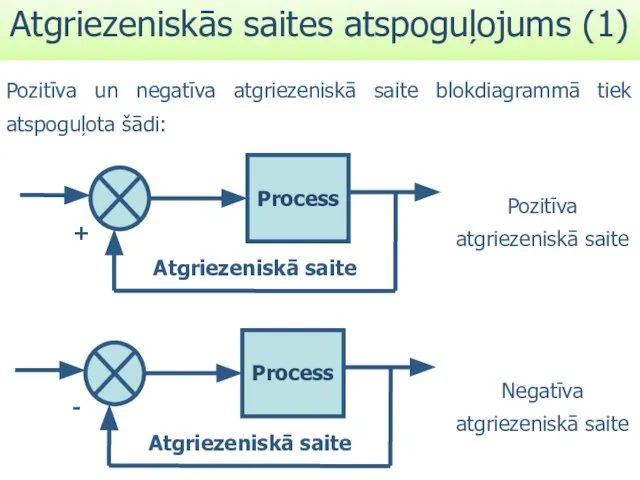
- 26. Atgriezeniskās saites atspoguļojums (1) Pozitīva un negatīva atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi: Pozitīva atgriezeniskā saite
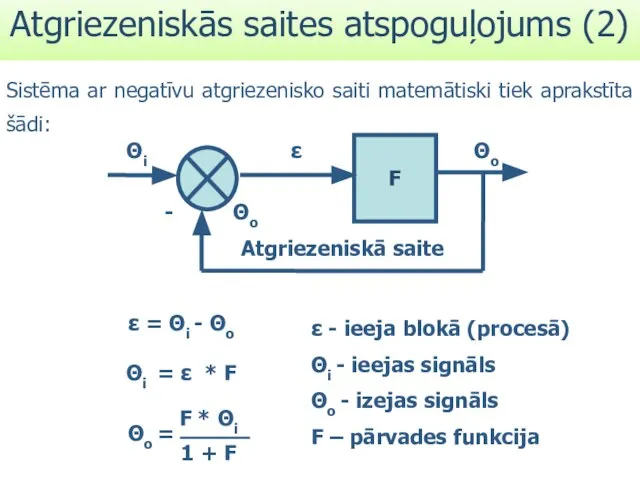
- 27. Sistēma ar negatīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi: F Θi - ε Θo Θo ε
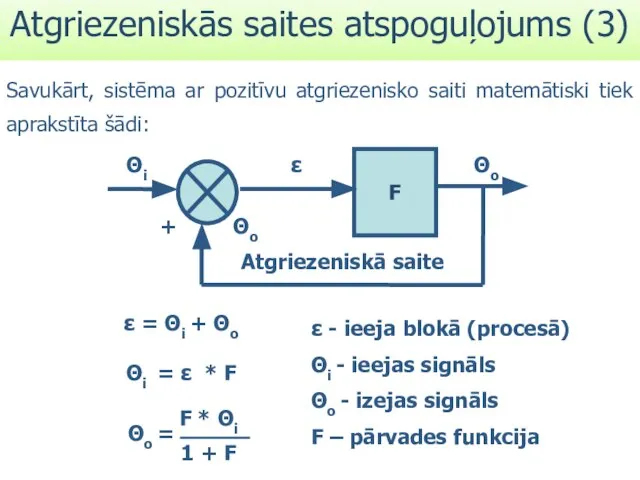
- 28. Savukārt, sistēma ar pozitīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi: F Θi + ε Θo Θo
- 29. Atgriezeniskā saite var būt: Automātiska atgriezeniskā saite Manuāla atgriezeniskā saite Automātiska atgriezeniskā saite ir saistīta ar
- 30. Automātiskas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra ir ieejas signāls, kas
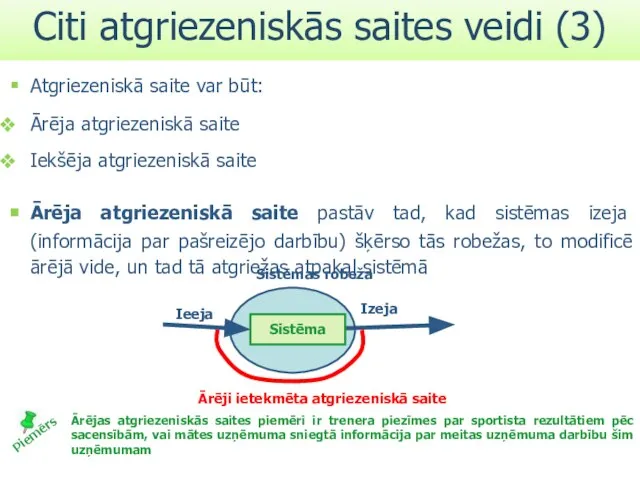
- 31. Atgriezeniskā saite var būt: Ārēja atgriezeniskā saite Iekšēja atgriezeniskā saite Ārēja atgriezeniskā saite pastāv tad, kad
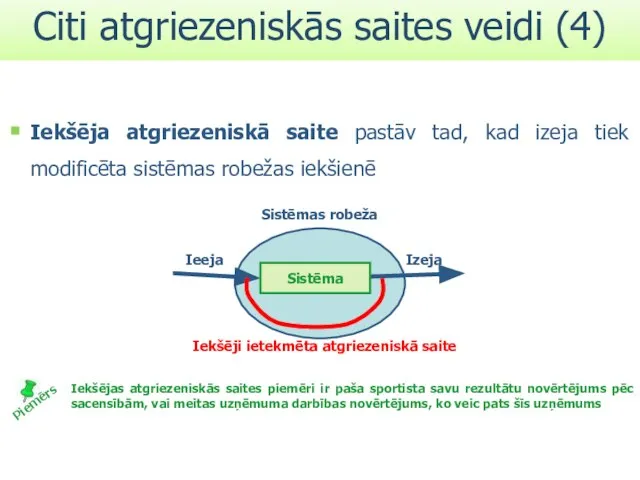
- 32. Iekšēja atgriezeniskā saite pastāv tad, kad izeja tiek modificēta sistēmas robežas iekšienē Iekšējas atgriezeniskās saites piemēri
- 33. Tādējādi, vadības sistēma uztur sistēmas izejas mainīgā vērtību iepriekš definētās robežās, izmantojot šim nolūkam pašregulējošos mehānismu,
- 34. Vadāmais objekts var būt divos stāvokļos, kas abi ir nepieciešami sistēmas izdzīvošanai: Stāvoklis var būt stabils
- 35. Īstermiņa nestabilitāte ir nepieciešama sistēmas adaptācijai un apmācībai Sistēmas uzvedība uzrāda nestabilitāti, ja sistēmas vadāmais objekts
- 36. Sistēmas specifiska uzvedība ir atkarīga no atgriezeniskās saites sistēmas (detektors, salīdzinātājs un izpildmehānisms) kvalitātes, ko nosaka
- 37. Vadības cikla ilgums ir laika intervāls, sākot no laika momenta, kad detektors ir uztvēris izmaiņas vadāmajā
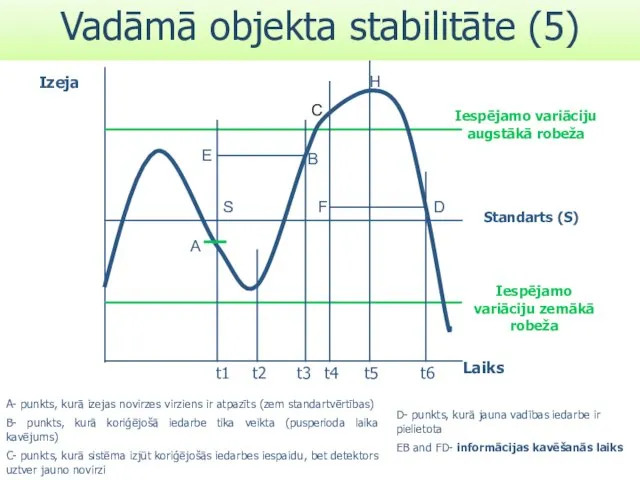
- 38. Izeja Laiks Iespējamo variāciju zemākā robeža Standarts (S) Iespējamo variāciju augstākā robeža A- punkts, kurā izejas
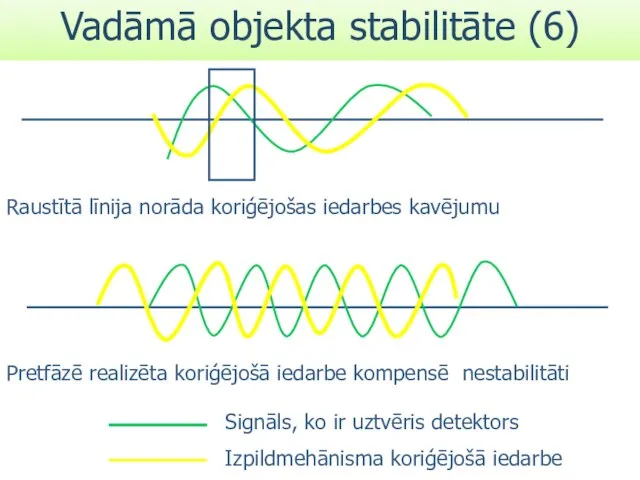
- 39. Signāls, ko ir uztvēris detektors Izpildmehānisma koriģējošā iedarbe Raustītā līnija norāda koriģējošas iedarbes kavējumu Pretfāzē realizēta
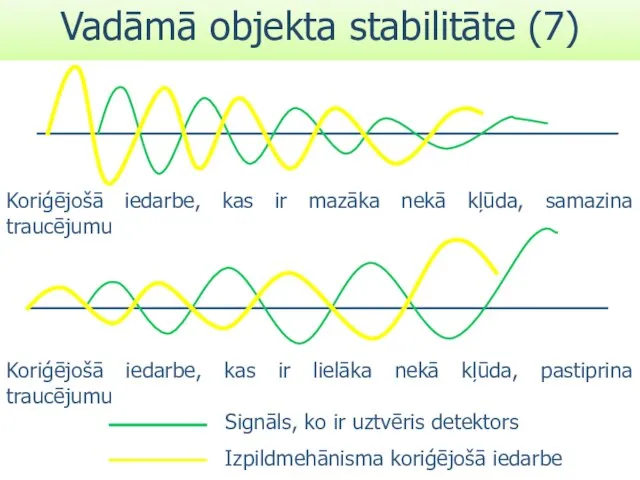
- 40. Koriģējošā iedarbe, kas ir lielāka nekā kļūda, pastiprina traucējumu Koriģējošā iedarbe, kas ir mazāka nekā kļūda,
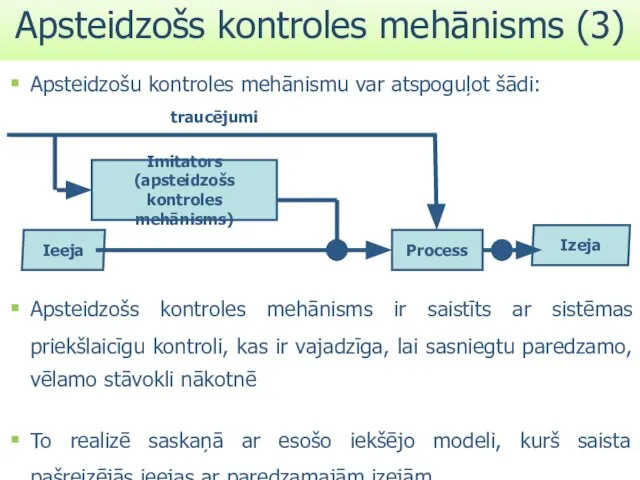
- 41. Apsteidzošs kontroles mehānisms (1) Apsteidzošs kontroles mehānisms novērš atgriezeniskās saites trūkumu Apsteidzošs kontroles mehānisms darbojas pirms
- 42. Apsteidzošs kontroles mehānisms (2) Apsteidzošs kontroles mehānisms nodrošina informāciju par paredzamo sistēmas uzvedību un imitē reālo
- 43. Apsteidzošs kontroles mehānisms ir saistīts ar sistēmas priekšlaicīgu kontroli, kas ir vajadzīga, lai sasniegtu paredzamo, vēlamo
- 44. Apsteidzošs kontroles mehānisms (4) Ideālā situācijā apsteidzošs kontroles mehānisms var pilnībā samazināt identificēto traucējumu ietekmi uz
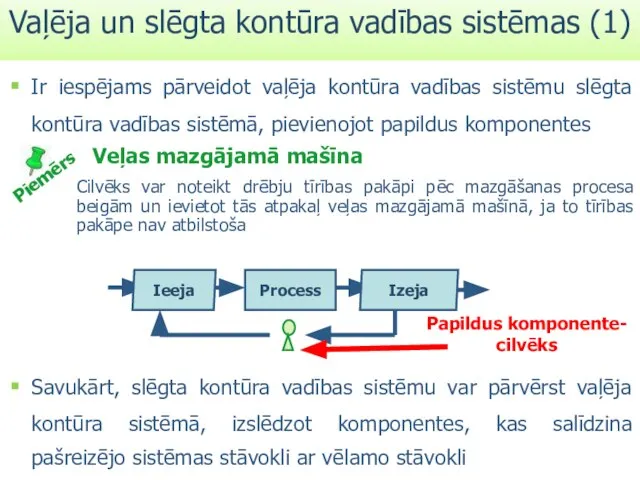
- 45. Savukārt, slēgta kontūra vadības sistēmu var pārvērst vaļēja kontūra sistēmā, izslēdzot komponentes, kas salīdzina pašreizējo sistēmas
- 46. Organizācijas var tikt apskatītas kā vaļēja kontūra vadības sistēmas, ja cilvēki, kas strādā organizācijā, tiek izslēgti
- 47. Pirmais kibernētiskas vadības princips: sistēmas iekšējā vadības mehānisma sekmes ir atkarīgas no diviem faktoriem: Nepārtrauktas un
- 48. Atbilstoši N.Vīneram vadība ir sinonīms komunikācijai: “Vadība nav nekas cits kā ziņojuma nosūtīšana, kas efektīvi maina
- 49. Trešais kibernētiskas vadības princips: vadāmajam objektam izejot ārpus kontroles, un tieši šī procesa laikā notiek objekta
- 50. Jo sarežģītāka ir sistēma, jo grūtāk ir to pētīt un vadīt, citiem vārdiem sakot, jo grūtāk
- 51. Nepieciešamās daudzveidības likumu formulēja Ross Ešbijs (R.Ashby) 1964.gadā, sakot, ka tikai daudzveidība var tikt galā ar
- 53. Скачать презентацию
Слайд 2Slēgta kontūra vadības sistēmas
Slēgta kontūra vadības sistēmā tiek nodalītas detektora, salīdzinātāja un
Slēgta kontūra vadības sistēmas
Slēgta kontūra vadības sistēmā tiek nodalītas detektora, salīdzinātāja un
Слайд 3Atgriezeniskā saite (1)
Atgriezeniskā saite ir pamatstratēģija, kas ļauj sistēmai kompensēt neparedzētas novirzes
Atgriezeniskā saite (1)
Atgriezeniskā saite ir pamatstratēģija, kas ļauj sistēmai kompensēt neparedzētas novirzes
Слайд 4Vadībā atgriezeniskajai saitei ir tikai informatīvs raksturs: tā pārnes informāciju, nevis kādu
Vadībā atgriezeniskajai saitei ir tikai informatīvs raksturs: tā pārnes informāciju, nevis kādu
Слайд 5Atgriezeniskā saite kā kontroles mehānisms darbojas, pamatojoties vairāk uz pašreizējo nekā uz
Atgriezeniskā saite kā kontroles mehānisms darbojas, pamatojoties vairāk uz pašreizējo nekā uz
Слайд 6Pozitīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā,
Pozitīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā,
Слайд 7Tādējādi, vārds „pozitīvs” atgriezeniskās saites definīcijā nemaz nenozīmē, ka atgriezeniskās saites sekas
Tādējādi, vārds „pozitīvs” atgriezeniskās saites definīcijā nemaz nenozīmē, ka atgriezeniskās saites sekas
Слайд 8Tādējādi, pozitīva atgriezeniskā saite ir pārejoša parādība, tā nevar pastāvēt bezgalīgi ilgi.
Tādējādi, pozitīva atgriezeniskā saite ir pārejoša parādība, tā nevar pastāvēt bezgalīgi ilgi.
Слайд 9Bioloģijā pozitīvas atgriezeniskās saites piemērs ir asins sarecēšanas process. Atgriezeniskās saites kontūrs
Bioloģijā pozitīvas atgriezeniskās saites piemērs ir asins sarecēšanas process. Atgriezeniskās saites kontūrs
Слайд 10Negatīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā,
Negatīva atgriezeniskā saite ir saistīta ar sistēmas izejas daļas ievadi atpakaļ ieejā,
Слайд 11Negatīva atgriezeniskā saite ir vadību uzturoša, un tā var pastāvēt ilgtermiņā
Negatīva atgriezeniskā
Negatīva atgriezeniskā saite ir vadību uzturoša, un tā var pastāvēt ilgtermiņā
Negatīva atgriezeniskā

Слайд 12Negatīvas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra
Negatīvas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra
Слайд 13No vienas puses negatīva atgriezeniskā saite nodrošina jebkuru traucējumu kompensēšanu, tādēļ ka
No vienas puses negatīva atgriezeniskā saite nodrošina jebkuru traucējumu kompensēšanu, tādēļ ka
Слайд 14Attiecībā uz negatīvu atgriezenisko saiti var izdalīt:
Pirmās kārtas atgriezenisko saiti
Otrās kārtas atgriezenisko
Attiecībā uz negatīvu atgriezenisko saiti var izdalīt:
Pirmās kārtas atgriezenisko saiti
Otrās kārtas atgriezenisko
Слайд 15Pirmās kārtas atgriezeniskās saites sistēmas var tikt arī nosauktas par sistēmām ar
Pirmās kārtas atgriezeniskās saites sistēmas var tikt arī nosauktas par sistēmām ar
Слайд 16Pirmās kārtas atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi
Sistēma koriģē novirzes no vēlamās
Pirmās kārtas atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi
Sistēma koriģē novirzes no vēlamās
Слайд 17
Mērķis: uzturēt uzdoto istabas temperatūru, piemēram, 24oC
Komanda: ieslēgt/izslēgt sildelementu gadījumā, ja temperatūra
Mērķis: uzturēt uzdoto istabas temperatūru, piemēram, 24oC
Komanda: ieslēgt/izslēgt sildelementu gadījumā, ja temperatūra
Слайд 18Otrās kārtas atgriezeniskās saites sistēmas var tikt nosauktas par sistēmām ar automātisku
Otrās kārtas atgriezeniskās saites sistēmas var tikt nosauktas par sistēmām ar automātisku
Слайд 19Alternatīvas darbības, kas ir iebūvētas sistēmā, tiek pārmeklētas un izdarīta izvēle, ja
Alternatīvas darbības, kas ir iebūvētas sistēmā, tiek pārmeklētas un izdarīta izvēle, ja
Слайд 20Pagātnes informācija tiek izmantota lēmumu pieņemšanai tagadnē
Ja sistēmai nav pieejama pagātnes informācija,
Pagātnes informācija tiek izmantota lēmumu pieņemšanai tagadnē
Ja sistēmai nav pieejama pagātnes informācija,
Слайд 21Atmiņa: kopējais kanālu skaits, kanālu statuss (brīvs vai nav brīvs)
Mērķis: savienot, izmantojot
Atmiņa: kopējais kanālu skaits, kanālu statuss (brīvs vai nav brīvs)
Mērķis: savienot, izmantojot
Слайд 22Trešās kārtas atgriezeniskās saites sistēmas atspoguļo savus pagātnes lēmumus (domājošs mērķu mainītājs)
Trešās
Trešās kārtas atgriezeniskās saites sistēmas atspoguļo savus pagātnes lēmumus (domājošs mērķu mainītājs)
Trešās
Слайд 23Ja daudz atmiņu var kombinēt, un ja no daudzām kombinācijām dažas var
Ja daudz atmiņu var kombinēt, un ja no daudzām kombinācijām dažas var
Слайд 24Trešās kārtas atgriezeniskās saites sistēma ir autonoma, un tai piemīt spēja mācīties
Trešās kārtas atgriezeniskās saites sistēma ir autonoma, un tai piemīt spēja mācīties
Слайд 25Negatīva atgriezeniskā saite (12)
Informācija par
pašreizējo stāvokli
Lēmums
Atmiņas
atjaunošana
Rekombinēšana
un izvēle
Lēmums
Darbības kurss
Atmiņa
Informācija par
pašreizējo
Negatīva atgriezeniskā saite (12)
Informācija par
pašreizējo stāvokli
Lēmums
Atmiņas
atjaunošana
Rekombinēšana
un izvēle
Lēmums
Darbības kurss
Atmiņa
Informācija par
pašreizējo
Слайд 26Atgriezeniskās saites atspoguļojums (1)
Pozitīva un negatīva atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi:
Pozitīva
Atgriezeniskās saites atspoguļojums (1)
Pozitīva un negatīva atgriezeniskā saite blokdiagrammā tiek atspoguļota šādi:
Pozitīva
Слайд 27Sistēma ar negatīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi:
F
Θi
-
ε
Θo
Θo
ε = Θi -
Sistēma ar negatīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi:
F
Θi
-
ε
Θo
Θo
ε = Θi -
Слайд 28Savukārt, sistēma ar pozitīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi:
F
Θi
+
ε
Θo
Θo
ε = Θi
Savukārt, sistēma ar pozitīvu atgriezenisko saiti matemātiski tiek aprakstīta šādi:
F
Θi
+
ε
Θo
Θo
ε = Θi
Слайд 29Atgriezeniskā saite var būt:
Automātiska atgriezeniskā saite
Manuāla atgriezeniskā saite
Automātiska atgriezeniskā saite ir saistīta
Atgriezeniskā saite var būt:
Automātiska atgriezeniskā saite
Manuāla atgriezeniskā saite
Automātiska atgriezeniskā saite ir saistīta
Слайд 30Automātiskas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra
Automātiskas atgriezeniskās saites piemērs ir termostata realizētā vadība. Tajā vēlamā istabas temperatūra
Слайд 31Atgriezeniskā saite var būt:
Ārēja atgriezeniskā saite
Iekšēja atgriezeniskā saite
Ārēja atgriezeniskā saite pastāv tad,
Atgriezeniskā saite var būt:
Ārēja atgriezeniskā saite
Iekšēja atgriezeniskā saite
Ārēja atgriezeniskā saite pastāv tad,
Слайд 32Iekšēja atgriezeniskā saite pastāv tad, kad izeja tiek modificēta sistēmas robežas iekšienē
Iekšējas
Iekšēja atgriezeniskā saite pastāv tad, kad izeja tiek modificēta sistēmas robežas iekšienē
Iekšējas
Слайд 33Tādējādi, vadības sistēma uztur sistēmas izejas mainīgā vērtību iepriekš definētās robežās, izmantojot
Tādējādi, vadības sistēma uztur sistēmas izejas mainīgā vērtību iepriekš definētās robežās, izmantojot
Слайд 34Vadāmais objekts var būt divos stāvokļos, kas abi ir nepieciešami sistēmas izdzīvošanai:
Stāvoklis
Vadāmais objekts var būt divos stāvokļos, kas abi ir nepieciešami sistēmas izdzīvošanai:
Stāvoklis
Слайд 35Īstermiņa nestabilitāte ir nepieciešama sistēmas adaptācijai un apmācībai
Sistēmas uzvedība uzrāda nestabilitāti, ja
Īstermiņa nestabilitāte ir nepieciešama sistēmas adaptācijai un apmācībai
Sistēmas uzvedība uzrāda nestabilitāti, ja
Слайд 36Sistēmas specifiska uzvedība ir atkarīga no atgriezeniskās saites sistēmas (detektors, salīdzinātājs un
Sistēmas specifiska uzvedība ir atkarīga no atgriezeniskās saites sistēmas (detektors, salīdzinātājs un
Слайд 37Vadības cikla ilgums ir laika intervāls, sākot no laika momenta, kad detektors
Vadības cikla ilgums ir laika intervāls, sākot no laika momenta, kad detektors
Слайд 38Izeja
Laiks
Iespējamo variāciju zemākā robeža
Standarts (S)
Iespējamo variāciju augstākā robeža
A- punkts, kurā izejas novirzes
Izeja
Laiks
Iespējamo variāciju zemākā robeža
Standarts (S)
Iespējamo variāciju augstākā robeža
A- punkts, kurā izejas novirzes
Слайд 39Signāls, ko ir uztvēris detektors
Izpildmehānisma koriģējošā iedarbe
Raustītā līnija norāda koriģējošas iedarbes kavējumu
Pretfāzē
Signāls, ko ir uztvēris detektors
Izpildmehānisma koriģējošā iedarbe
Raustītā līnija norāda koriģējošas iedarbes kavējumu
Pretfāzē
Слайд 40Koriģējošā iedarbe, kas ir lielāka nekā kļūda, pastiprina traucējumu
Koriģējošā iedarbe, kas ir
Koriģējošā iedarbe, kas ir lielāka nekā kļūda, pastiprina traucējumu
Koriģējošā iedarbe, kas ir
Слайд 41Apsteidzošs kontroles mehānisms (1)
Apsteidzošs kontroles mehānisms novērš atgriezeniskās saites trūkumu
Apsteidzošs kontroles mehānisms
Apsteidzošs kontroles mehānisms (1)
Apsteidzošs kontroles mehānisms novērš atgriezeniskās saites trūkumu
Apsteidzošs kontroles mehānisms
Слайд 42Apsteidzošs kontroles mehānisms (2)
Apsteidzošs kontroles mehānisms nodrošina informāciju par paredzamo sistēmas uzvedību
Apsteidzošs kontroles mehānisms (2)
Apsteidzošs kontroles mehānisms nodrošina informāciju par paredzamo sistēmas uzvedību
Слайд 43Apsteidzošs kontroles mehānisms ir saistīts ar sistēmas priekšlaicīgu kontroli, kas ir vajadzīga,
Apsteidzošs kontroles mehānisms ir saistīts ar sistēmas priekšlaicīgu kontroli, kas ir vajadzīga,
Слайд 44Apsteidzošs kontroles mehānisms (4)
Ideālā situācijā apsteidzošs kontroles mehānisms var pilnībā samazināt identificēto
Apsteidzošs kontroles mehānisms (4)
Ideālā situācijā apsteidzošs kontroles mehānisms var pilnībā samazināt identificēto
Слайд 45Savukārt, slēgta kontūra vadības sistēmu var pārvērst vaļēja kontūra sistēmā, izslēdzot komponentes,
Savukārt, slēgta kontūra vadības sistēmu var pārvērst vaļēja kontūra sistēmā, izslēdzot komponentes,
Слайд 46Organizācijas var tikt apskatītas kā vaļēja kontūra vadības sistēmas, ja cilvēki, kas
Organizācijas var tikt apskatītas kā vaļēja kontūra vadības sistēmas, ja cilvēki, kas
Слайд 47Pirmais kibernētiskas vadības princips: sistēmas iekšējā vadības mehānisma sekmes ir atkarīgas no
Pirmais kibernētiskas vadības princips: sistēmas iekšējā vadības mehānisma sekmes ir atkarīgas no
Слайд 48Atbilstoši N.Vīneram vadība ir sinonīms komunikācijai: “Vadība nav nekas cits kā ziņojuma
Atbilstoši N.Vīneram vadība ir sinonīms komunikācijai: “Vadība nav nekas cits kā ziņojuma
Слайд 49Trešais kibernētiskas vadības princips: vadāmajam objektam izejot ārpus kontroles, un tieši šī
Trešais kibernētiskas vadības princips: vadāmajam objektam izejot ārpus kontroles, un tieši šī
Слайд 50Jo sarežģītāka ir sistēma, jo grūtāk ir to pētīt un vadīt, citiem
Jo sarežģītāka ir sistēma, jo grūtāk ir to pētīt un vadīt, citiem
Слайд 51Nepieciešamās daudzveidības likumu formulēja Ross Ešbijs (R.Ashby) 1964.gadā, sakot, ka tikai daudzveidība
Nepieciešamās daudzveidības likumu formulēja Ross Ešbijs (R.Ashby) 1964.gadā, sakot, ka tikai daudzveidība
 Научная деятельность
Научная деятельность Нетрадиционные техники рисования в совместной деятельности детей и родителей
Нетрадиционные техники рисования в совместной деятельности детей и родителей Конструирование поясной одежды. Снятие мерк для построения чертежа поясного изделия юбки
Конструирование поясной одежды. Снятие мерк для построения чертежа поясного изделия юбки Роспись красками по камню
Роспись красками по камню Игра - викторина для детей старшего дошкольного возраста Столовый этикет
Игра - викторина для детей старшего дошкольного возраста Столовый этикет Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих. Практика
Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих. Практика Основные методические приемы тренинга
Основные методические приемы тренинга Инноватика в образовании
Инноватика в образовании Друдлы (1.1)
Друдлы (1.1) Портфолио Чебыкиной Светланы Петровны
Портфолио Чебыкиной Светланы Петровны Что год грядущий нам готовит
Что год грядущий нам готовит Гимнастика для глаз
Гимнастика для глаз Рисуем красками игрушки (для детей 5-7 лет)
Рисуем красками игрушки (для детей 5-7 лет) Логопедическая распевка
Логопедическая распевка Африканская саванна. Раскраска или оформление изделия аппликацией
Африканская саванна. Раскраска или оформление изделия аппликацией Рабочая тетрадь по чистописанию
Рабочая тетрадь по чистописанию Приключения кота
Приключения кота Веселые старты с воздушными шарами. Физкультура
Веселые старты с воздушными шарами. Физкультура Животные нашего леса. Игра
Животные нашего леса. Игра Похожие и разные предметы. Занятие
Похожие и разные предметы. Занятие Выпускники 2020
Выпускники 2020 Кто где спрятался? Викторина
Кто где спрятался? Викторина Автоматизация звука -ш-
Автоматизация звука -ш- Характеристика целостного педагогического процесса. Основные этапы и движущие силы педагогического процесса
Характеристика целостного педагогического процесса. Основные этапы и движущие силы педагогического процесса Наши добрые дела, БДОУ г. Омска Детский сад №176
Наши добрые дела, БДОУ г. Омска Детский сад №176 Как развивать дошкольников без вреда для развития
Как развивать дошкольников без вреда для развития Тапқыр достар
Тапқыр достар Проект по созданию игры
Проект по созданию игры