Тема работы: "ИДЕНТИФИКАЦИЯ ИНДУКЦИОННОЙ ТИГЕЛЬНОЙ ПЕЧИ КАК ОБЪЕКТА УПРАВЛЕНИЯ С УЧЕТОМ ПЕРЕМЕННОГО УРОВНЯ РАСПЛАВА В ТИГЛЕ" Ра
- Тема работы: "ИДЕНТИФИКАЦИЯ ИНДУКЦИОННОЙ ТИГЕЛЬНОЙ ПЕЧИ КАК ОБЪЕКТА УПРАВЛЕНИЯ С УЧЕТОМ ПЕРЕМЕННОГО УРОВНЯ РАСПЛАВА В ТИГЛЕ" Ра

Содержание
- 2. Цель исследования Целью работы является разработка структурной схемы системы регулирования тока и мощности индукционной тигельной печи,
- 3. Индукционный нагрев применяется во многих областях обработки металлов: в печах для плавки черных и цветных металлов
- 4. Обзор работ, в которых ранее рассматривались вопросы управления индукционными установками Проблемы связанные с управлением электрическими параметрами
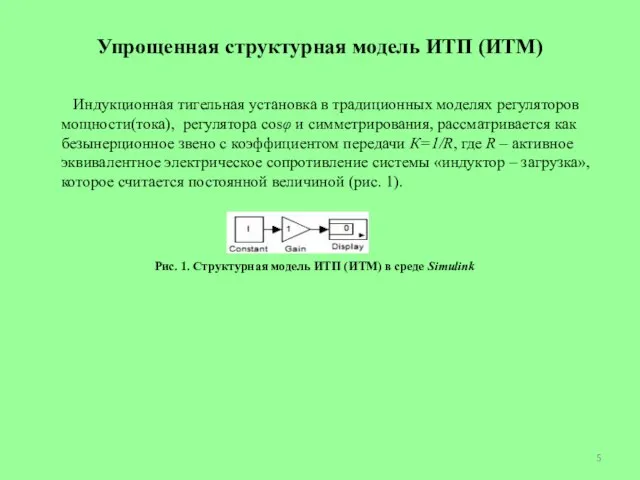
- 5. Индукционная тигельная установка в традиционных моделях регуляторов мощности(тока), регулятора cosφ и симметрирования, рассматривается как безынерционное звено
- 6. Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink, без учета переменного уровня расплава в
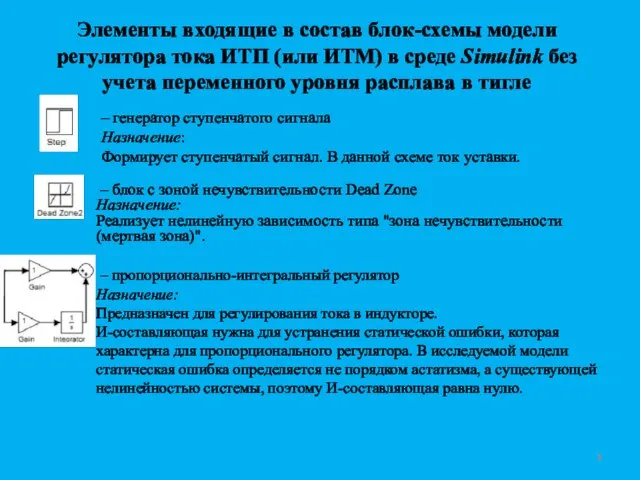
- 7. Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в среде Simulink без учета
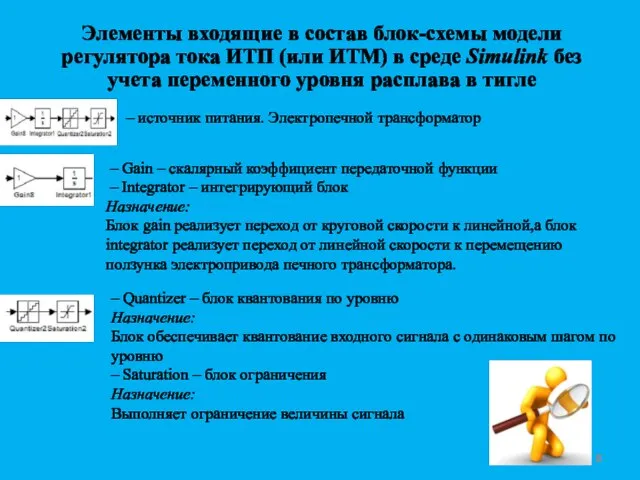
- 8. Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в среде Simulink без учета
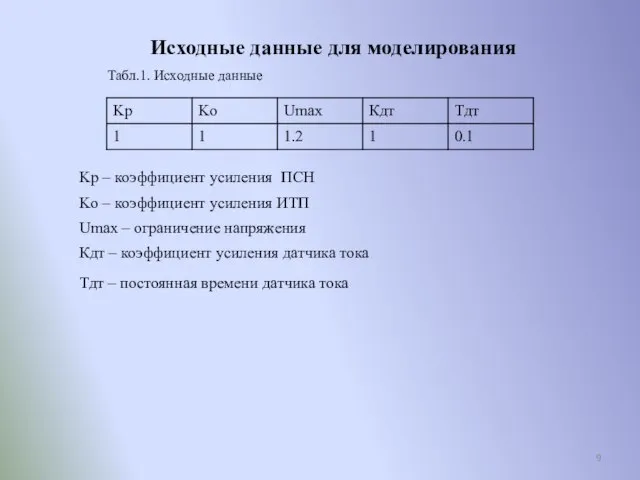
- 9. Исходные данные для моделирования Табл.1. Исходные данные Kp – коэффициент усиления ПСН Ko – коэффициент усиления
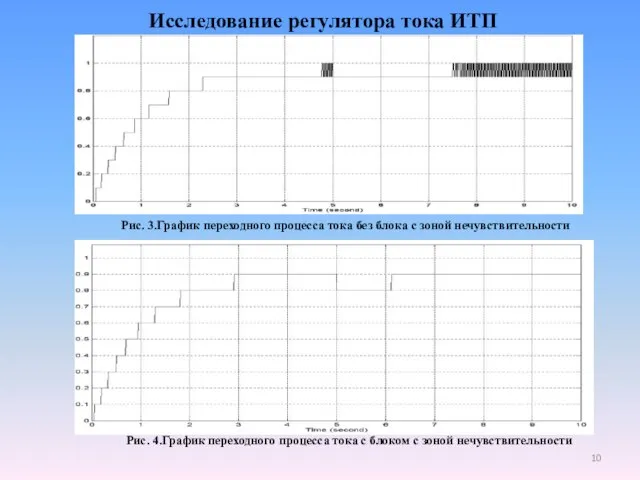
- 10. Исследование регулятора тока ИТП Рис. 4.График переходного процесса тока с блоком с зоной нечувствительности Рис. 3.График
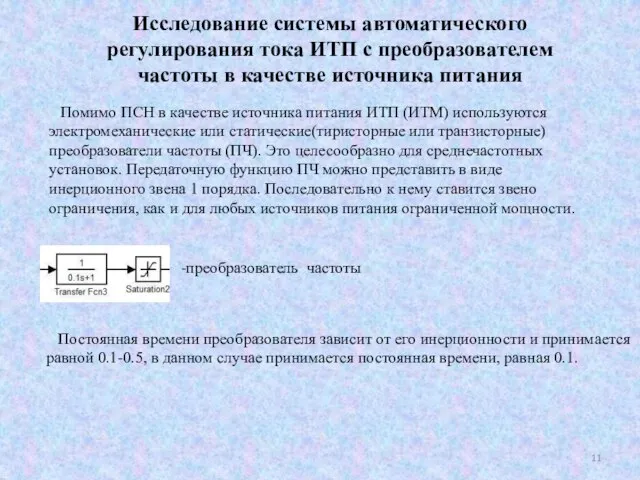
- 11. Исследование системы автоматического регулирования тока ИТП с преобразователем частоты в качестве источника питания Помимо ПСН в
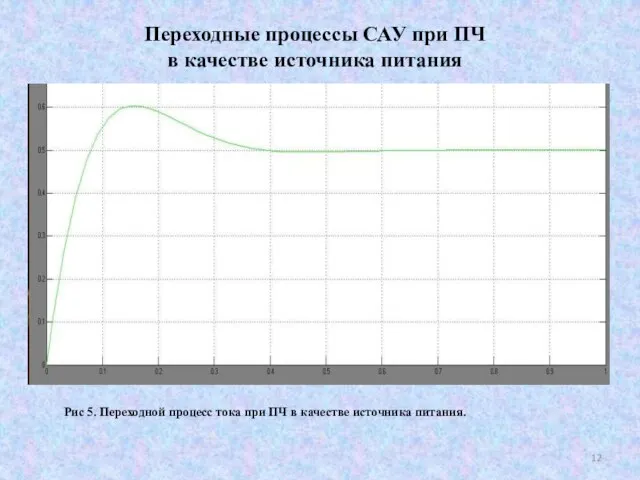
- 12. Переходные процессы САУ при ПЧ в качестве источника питания Рис 5. Переходной процесс тока при ПЧ
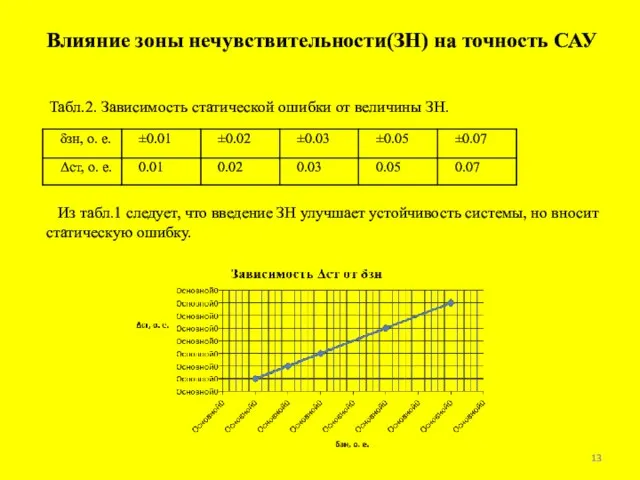
- 13. Влияние зоны нечувствительности(ЗН) на точность САУ Табл.2. Зависимость статической ошибки от величины ЗН. Из табл.1 следует,
- 14. В процессе работы ИТМ, уровень расплава изменяется в широком диапазоне(от 100% до 20%). Это оказывает влияние
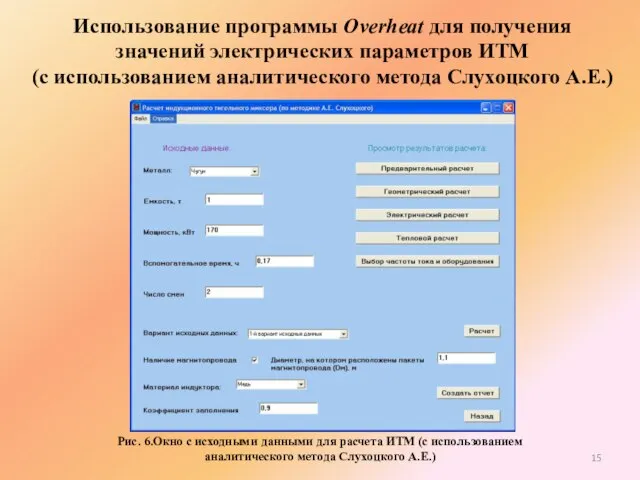
- 15. Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием аналитического метода Слухоцкого А.Е.) Рис.
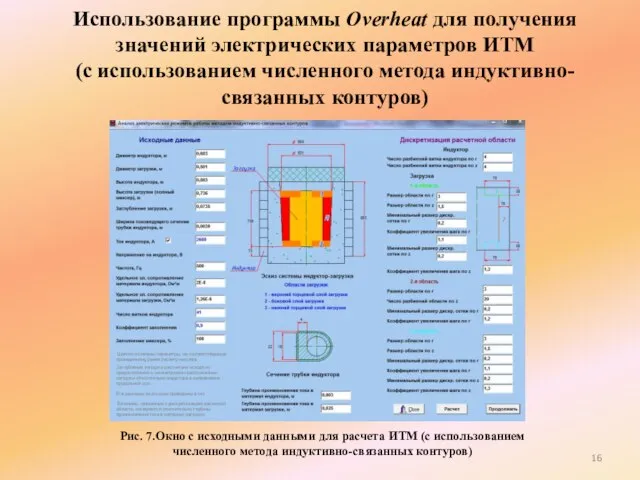
- 16. Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием численного метода индуктивно-связанных контуров) Рис.
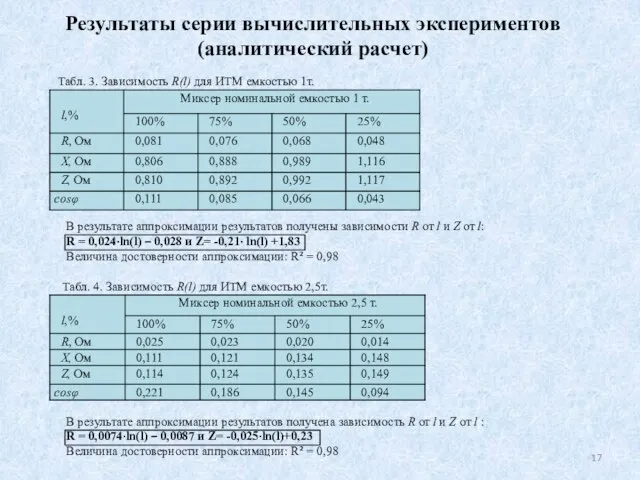
- 17. Результаты серии вычислительных экспериментов (аналитический расчет) Табл. 3. Зависимость R(l) для ИТМ емкостью 1т. В результате
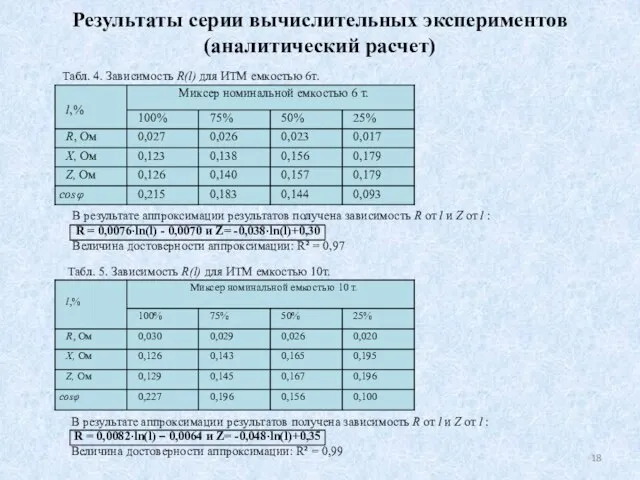
- 18. Результаты серии вычислительных экспериментов (аналитический расчет) Табл. 4. Зависимость R(l) для ИТМ емкостью 6т. В результате
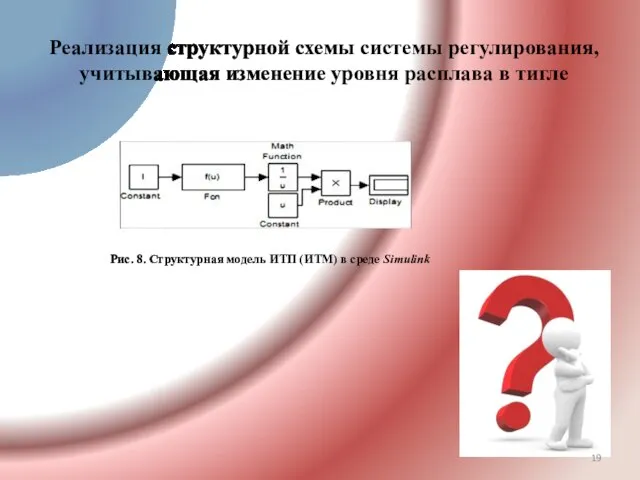
- 19. Реализация структурной схемы системы регулирования, учитывающая изменение уровня расплава в тигле Рис. 8. Структурная модель ИТП
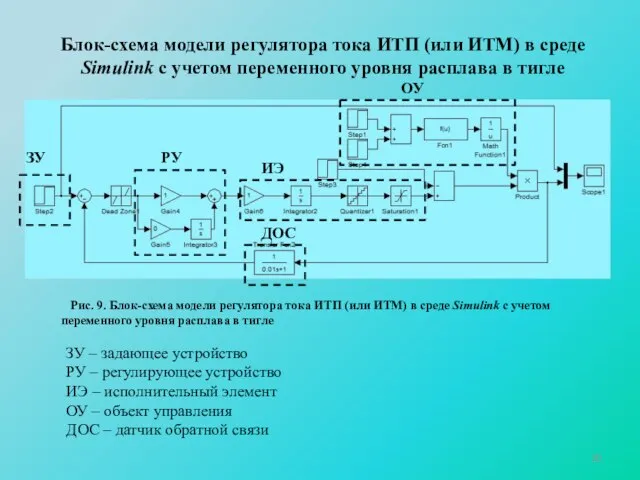
- 20. Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink с учетом переменного уровня расплава в
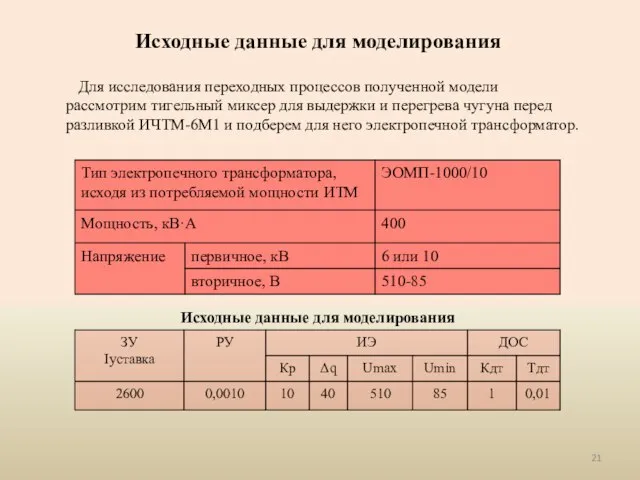
- 21. Для исследования переходных процессов полученной модели рассмотрим тигельный миксер для выдержки и перегрева чугуна перед разливкой
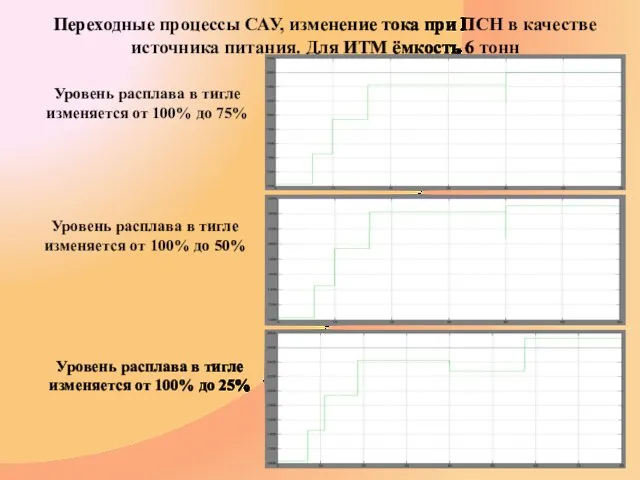
- 22. Уровень расплава в тигле изменяется от 100% до 75% Уровень расплава в тигле изменяется от 100%
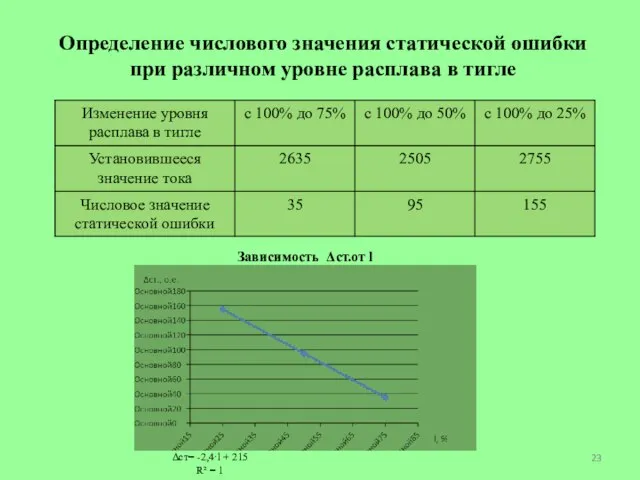
- 23. Определение числового значения статической ошибки при различном уровне расплава в тигле Δст= -2,4·l + 215 R²
- 24. Выводы по работе 1.Система автоматического регулирования тока ИТП (ИТМ) является системой второго порядка. 2.Применение ПЧ в
- 25. Планы на будущее Полученные зависимости активного и полного сопротивлений от высоты уровня расплава в тигле планируется
- 27. Скачать презентацию
Слайд 2Цель исследования
Целью работы является разработка структурной схемы системы регулирования тока и
Цель исследования
Целью работы является разработка структурной схемы системы регулирования тока и
Слайд 3
Индукционный нагрев применяется во многих областях обработки металлов: в печах для
Индукционный нагрев применяется во многих областях обработки металлов: в печах для
Слайд 4Обзор работ, в которых ранее рассматривались вопросы управления индукционными установками
Проблемы связанные
Обзор работ, в которых ранее рассматривались вопросы управления индукционными установками
Проблемы связанные
Слайд 5 Индукционная тигельная установка в традиционных моделях регуляторов мощности(тока), регулятора cosφ и
Индукционная тигельная установка в традиционных моделях регуляторов мощности(тока), регулятора cosφ и
Слайд 6Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink, без учета
Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink, без учета

Слайд 7Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в
Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в
Слайд 8Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в
Элементы входящие в состав блок-схемы модели регулятора тока ИТП (или ИТМ) в
Слайд 9 Исходные данные для моделирования
Табл.1. Исходные данные
Kp – коэффициент усиления
Исходные данные для моделирования
Табл.1. Исходные данные
Kp – коэффициент усиления
Слайд 10Исследование регулятора тока ИТП
Рис. 4.График переходного процесса тока с блоком с зоной
Исследование регулятора тока ИТП
Рис. 4.График переходного процесса тока с блоком с зоной
Слайд 11
Исследование системы автоматического регулирования тока ИТП с преобразователем частоты в качестве источника
Исследование системы автоматического регулирования тока ИТП с преобразователем частоты в качестве источника
Слайд 12Переходные процессы САУ при ПЧ в качестве источника питания
Рис 5. Переходной процесс
Переходные процессы САУ при ПЧ в качестве источника питания
Рис 5. Переходной процесс
Слайд 13Влияние зоны нечувствительности(ЗН) на точность САУ
Табл.2. Зависимость статической ошибки от величины ЗН.
Влияние зоны нечувствительности(ЗН) на точность САУ
Табл.2. Зависимость статической ошибки от величины ЗН.
Слайд 14
В процессе работы ИТМ, уровень расплава изменяется в широком диапазоне(от 100%
В процессе работы ИТМ, уровень расплава изменяется в широком диапазоне(от 100%
Слайд 15Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием аналитического
Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием аналитического
Слайд 16Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием численного
Использование программы Overheat для получения значений электрических параметров ИТМ (с использованием численного
Слайд 17Результаты серии вычислительных экспериментов (аналитический расчет)
Табл. 3. Зависимость R(l) для ИТМ емкостью
Результаты серии вычислительных экспериментов (аналитический расчет)
Табл. 3. Зависимость R(l) для ИТМ емкостью
Слайд 18Результаты серии вычислительных экспериментов (аналитический расчет)
Табл. 4. Зависимость R(l) для ИТМ емкостью
Результаты серии вычислительных экспериментов (аналитический расчет)
Табл. 4. Зависимость R(l) для ИТМ емкостью
Слайд 19Реализация структурной схемы системы регулирования, учитывающая изменение уровня расплава в тигле
Рис.
Реализация структурной схемы системы регулирования, учитывающая изменение уровня расплава в тигле
Рис.
Слайд 20Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink с учетом
Блок-схема модели регулятора тока ИТП (или ИТМ) в среде Simulink с учетом
Слайд 21 Для исследования переходных процессов полученной модели рассмотрим тигельный миксер для выдержки
Для исследования переходных процессов полученной модели рассмотрим тигельный миксер для выдержки
Слайд 22Уровень расплава в тигле изменяется от 100% до 75%
Уровень расплава в тигле
Уровень расплава в тигле изменяется от 100% до 75%
Уровень расплава в тигле
Слайд 23Определение числового значения статической ошибки при различном уровне расплава в тигле
Δст= -2,4·l
Определение числового значения статической ошибки при различном уровне расплава в тигле
Δст= -2,4·l
Слайд 24 Выводы по работе
1.Система автоматического регулирования тока ИТП (ИТМ) является системой
Выводы по работе 1.Система автоматического регулирования тока ИТП (ИТМ) является системой
Слайд 25 Планы на будущее
Полученные зависимости активного и полного сопротивлений от высоты
Планы на будущее Полученные зависимости активного и полного сопротивлений от высоты

 Презентация на тему квадратный сантиметр 3 класс
Презентация на тему квадратный сантиметр 3 класс  Презентация на тему Алгебраические дроби 8 класс
Презентация на тему Алгебраические дроби 8 класс Чихо
Чихо 27,09,21 Заманауи картографиялық әдістер 2сабақ
27,09,21 Заманауи картографиялық әдістер 2сабақ Хомячки - Технический заказчик
Хомячки - Технический заказчик Дюралюминий. Сфера применения
Дюралюминий. Сфера применения Южный Урал в годы ВОВ
Южный Урал в годы ВОВ Работа медицинского отдела
Работа медицинского отдела Измерение коррупции. Факторы коррупции. Лекция 2
Измерение коррупции. Факторы коррупции. Лекция 2 Учебники маминой юности и моей жизни
Учебники маминой юности и моей жизни Гусли и гусляры
Гусли и гусляры Анимация в культурно-досуговой деятельности дошкольников
Анимация в культурно-досуговой деятельности дошкольников Германия на пути к единству
Германия на пути к единству Презентация1
Презентация1 POP-ART портреты
POP-ART портреты Сложение и вычитание двузначных чисел 2 класс
Сложение и вычитание двузначных чисел 2 класс Ажиотажный маркетинг
Ажиотажный маркетинг Аудио-визуальная сцена
Аудио-визуальная сцена Мастер-класс по биологии
Мастер-класс по биологии Презентация на тему Степи. Растительность степи
Презентация на тему Степи. Растительность степи Виртуальный музей
Виртуальный музей Горбунов И.А. Меклер А.А. СПбГУ, Санкт-Петербург
Горбунов И.А. Меклер А.А. СПбГУ, Санкт-Петербург Творог в нашем мире
Творог в нашем мире بررسی HierarchyID
بررسی HierarchyID "ТРАНСФОРМАЦИЯ ГОСУДАРСТВЕННОЙ ПОЛИТИКИ В ОБЛАСТИ ВЗАИМОДЕЙСТВИЯ ГРАЖДАН И ВЛАСТИ НА МУНИЦИПАЛЬНЫЙ УРОВЕНЬ".
"ТРАНСФОРМАЦИЯ ГОСУДАРСТВЕННОЙ ПОЛИТИКИ В ОБЛАСТИ ВЗАИМОДЕЙСТВИЯ ГРАЖДАН И ВЛАСТИ НА МУНИЦИПАЛЬНЫЙ УРОВЕНЬ". «Гитара для всех»
«Гитара для всех» Презентация на тему Организация международной торговли интеллектуальной продукцией и инжиниринговыми услугами. Особенности вне
Презентация на тему Организация международной торговли интеллектуальной продукцией и инжиниринговыми услугами. Особенности вне А.С.Пушкин
А.С.Пушкин