ВИРТУАЛЬНЫЙ УДАЛЕННЫЙ ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО РОБОТОТЕХНИКЕ Зимин А.М., Илларионов В.В., Лесков А.Г., Лескова С.М., Шумов А.В.Мо
- ВИРТУАЛЬНЫЙ УДАЛЕННЫЙ ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО РОБОТОТЕХНИКЕ Зимин А.М., Илларионов В.В., Лесков А.Г., Лескова С.М., Шумов А.В.Мо

Содержание
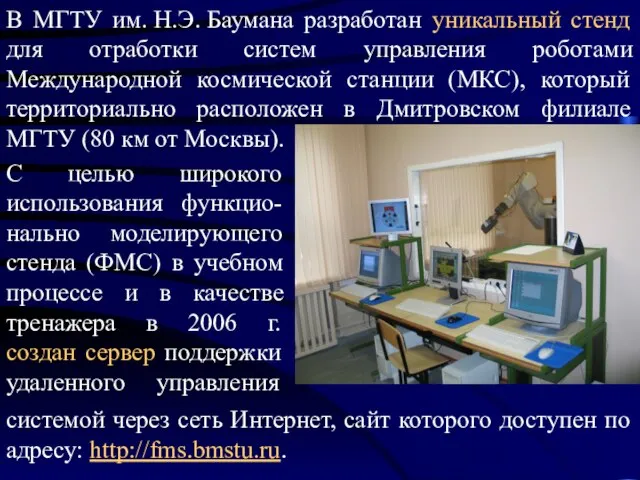
- 2. В МГТУ им. Н.Э. Баумана разработан уникальный стенд для отработки систем управления роботами Международной космической станции
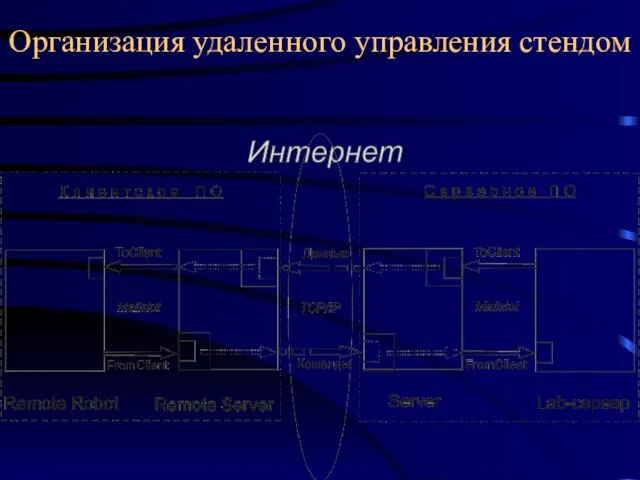
- 3. Организация удаленного управления стендом
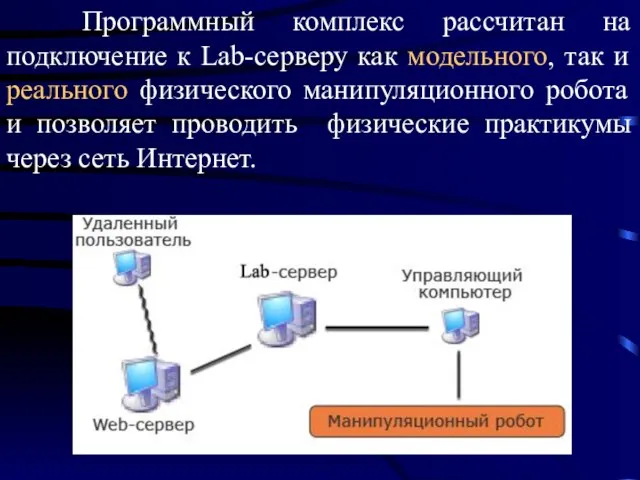
- 4. Программный комплекс рассчитан на подключение к Lab-серверу как модельного, так и реального физического манипуляционного робота и
- 5. Обеспечение доступа к уникальному функционально-моделирующему стенду с любого сколь угодно удаленного компьютера через сеть Интернет. Автоматизация
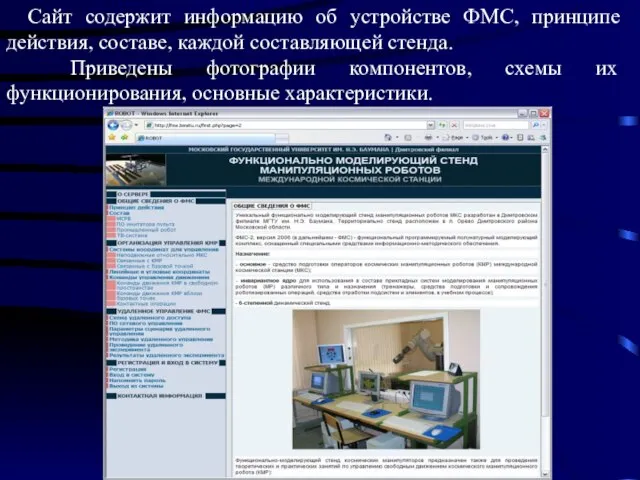
- 6. Сайт содержит информацию об устройстве ФМС, принципе действия, составе, каждой составляющей стенда. Приведены фотографии компонентов, схемы
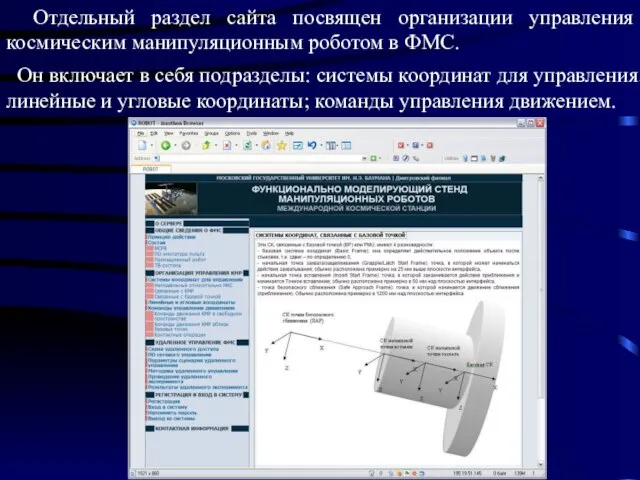
- 7. Отдельный раздел сайта посвящен организации управления космическим манипуляционным роботом в ФМС. Он включает в себя подразделы:
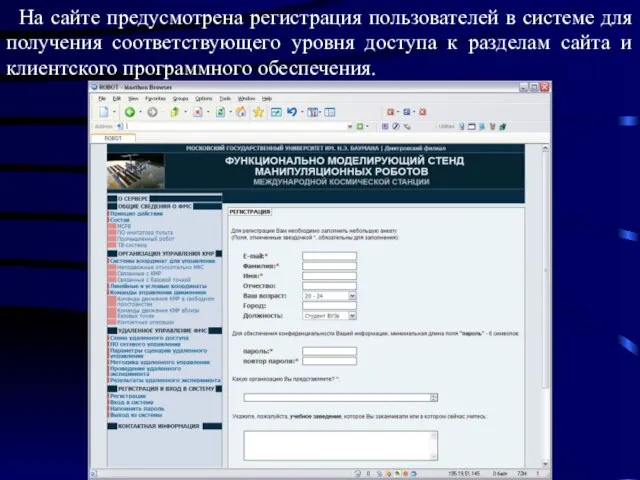
- 8. На сайте предусмотрена регистрация пользователей в системе для получения соответствующего уровня доступа к разделам сайта и
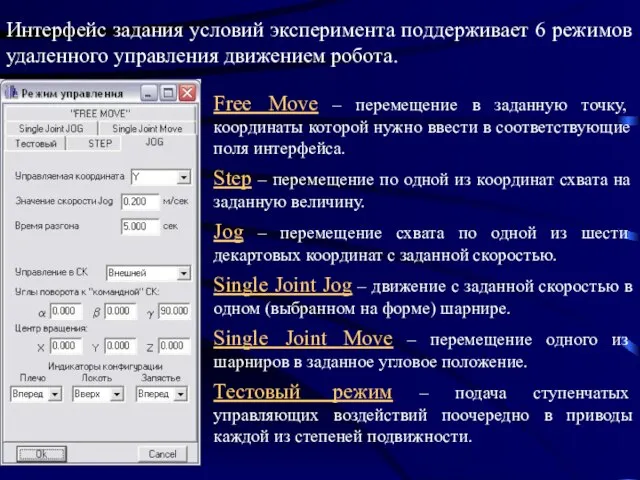
- 9. Интерфейс задания условий эксперимента поддерживает 6 режимов удаленного управления движением робота. Free Move – перемещение в
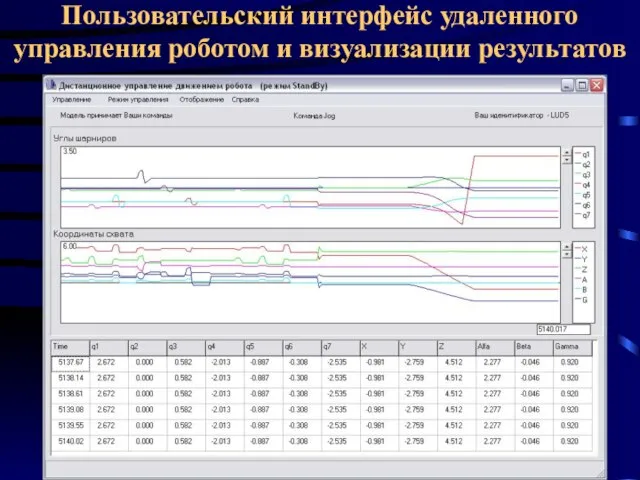
- 10. Пользовательский интерфейс удаленного управления роботом и визуализации результатов
- 11. Сайт «Функционально моделирующий стенд манипуляционных роботов международной космической станции» http://fms.bmstu.ru находится в настоящее время в режиме
- 13. Скачать презентацию
Слайд 2В МГТУ им. Н.Э. Баумана разработан уникальный стенд для отработки систем управления роботами Международной
В МГТУ им. Н.Э. Баумана разработан уникальный стенд для отработки систем управления роботами Международной
Слайд 3Организация удаленного управления стендом
Организация удаленного управления стендом
Слайд 4 Программный комплекс рассчитан на подключение к Lab-серверу как модельного, так и
Программный комплекс рассчитан на подключение к Lab-серверу как модельного, так и
Слайд 5Обеспечение доступа к уникальному функционально-моделирующему стенду с любого сколь угодно удаленного компьютера
Обеспечение доступа к уникальному функционально-моделирующему стенду с любого сколь угодно удаленного компьютера
Слайд 6 Сайт содержит информацию об устройстве ФМС, принципе действия, составе, каждой составляющей
Сайт содержит информацию об устройстве ФМС, принципе действия, составе, каждой составляющей
Слайд 7 Отдельный раздел сайта посвящен организации управления космическим манипуляционным роботом в ФМС.
Отдельный раздел сайта посвящен организации управления космическим манипуляционным роботом в ФМС.
Слайд 8 На сайте предусмотрена регистрация пользователей в системе для получения соответствующего уровня
На сайте предусмотрена регистрация пользователей в системе для получения соответствующего уровня
Слайд 9Интерфейс задания условий эксперимента поддерживает 6 режимов удаленного управления движением робота.
Free Move
Интерфейс задания условий эксперимента поддерживает 6 режимов удаленного управления движением робота.
Free Move
Слайд 10Пользовательский интерфейс удаленного управления роботом и визуализации результатов
Пользовательский интерфейс удаленного управления роботом и визуализации результатов
Слайд 11Сайт «Функционально моделирующий стенд
манипуляционных роботов
международной космической станции»
http://fms.bmstu.ru
находится в
Сайт «Функционально моделирующий стенд манипуляционных роботов международной космической станции» http://fms.bmstu.ru находится в
 Корона - горшок для орхидей
Корона - горшок для орхидей Партнёры Архангельской межрегиональной организации профсоюза работников народного образования и науки РФ
Партнёры Архангельской межрегиональной организации профсоюза работников народного образования и науки РФ Учет движения наличных денежных средств с использованием 1С: Бухгалтерия
Учет движения наличных денежных средств с использованием 1С: Бухгалтерия Традиционные общества в XIX – начале XX века
Традиционные общества в XIX – начале XX века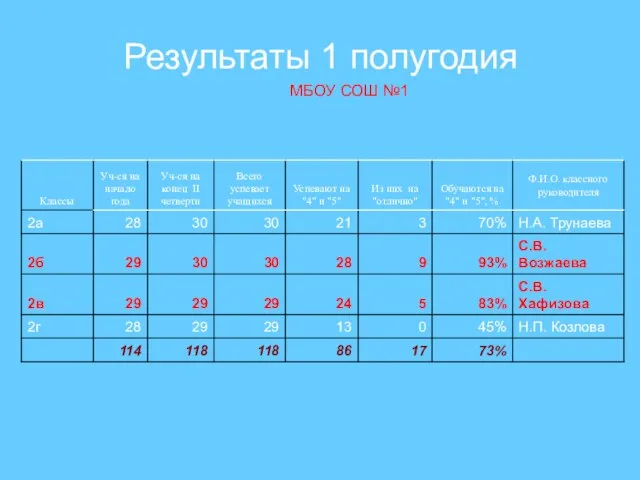 Результаты 1 полугодия МБОУ СОШ №1
Результаты 1 полугодия МБОУ СОШ №1 7кл_18-сабак_Тізбек_Презентация
7кл_18-сабак_Тізбек_Презентация Что было - что есть
Что было - что есть Партнерская программа
Партнерская программа Эдельвейс
Эдельвейс Магнитная составляющая электромагнитных волн
Магнитная составляющая электромагнитных волн Своя игра«Знаешь ли ты Ярославль?»
Своя игра«Знаешь ли ты Ярославль?» Презентация1
Презентация1 Формирование образного и логического мышления в процессе обучения литературе.
Формирование образного и логического мышления в процессе обучения литературе. Лекция 7. Духовно-нравственное воспитание и общие основы православной педагогики
Лекция 7. Духовно-нравственное воспитание и общие основы православной педагогики Отечественная война 1812 года
Отечественная война 1812 года Монферран Анри Луи Огюст Рикар
Монферран Анри Луи Огюст Рикар Открытая экоотчетность : требование времени
Открытая экоотчетность : требование времени Аварийно-спасательные работы
Аварийно-спасательные работы  Образование как целостный педагогический процесс
Образование как целостный педагогический процесс Презентация на тему Безопасный путь в школу
Презентация на тему Безопасный путь в школу ОРВИ на современном этапе
ОРВИ на современном этапе СКОРО СКАЗКА СКАЗЫВАЕТСЯ…
СКОРО СКАЗКА СКАЗЫВАЕТСЯ… АЛЕКСАНДР СУВОРОВ- «ГЕНЕРАЛ ВПЕРЁД»
АЛЕКСАНДР СУВОРОВ- «ГЕНЕРАЛ ВПЕРЁД» Транспорт России
Транспорт России Анализ нормативно – правовых актов: Азербайджан
Анализ нормативно – правовых актов: Азербайджан Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18
Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18 Общие должностные и специальные обязанности военнослужащих
Общие должностные и специальные обязанности военнослужащих Сказки, мифы, легенды, былины
Сказки, мифы, легенды, былины