- 616283

Содержание
- 2. Основные законы регулирования
- 3. Основные законы регулирования По характеру изменения регулирующего воздействия различают линейные и нелинейные законы регулирования. В технике
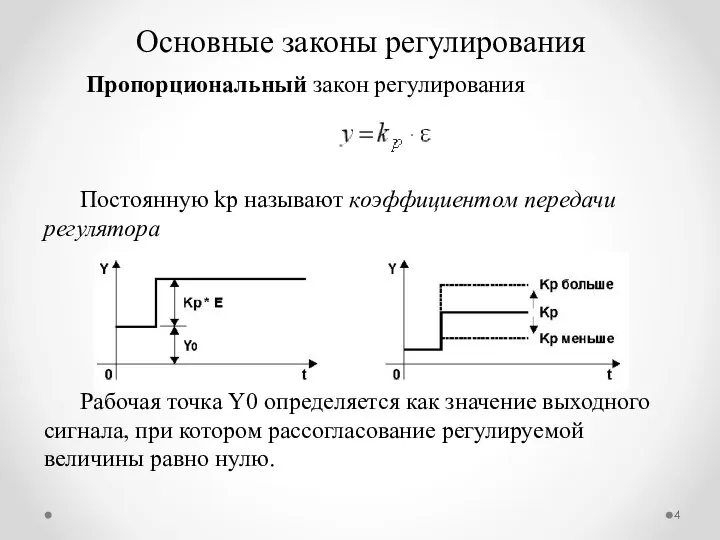
- 4. Основные законы регулирования Пропорциональный закон регулирования Постоянную kp называют коэффициентом передачи регулятора Рабочая точка Y0 определяется
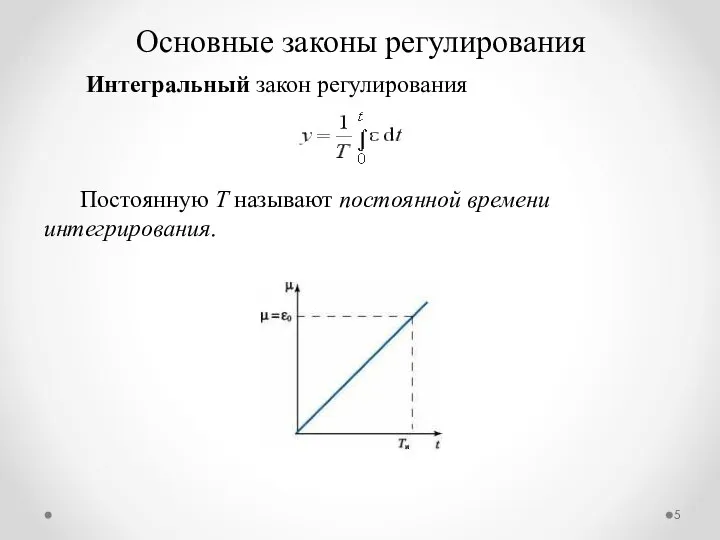
- 5. Основные законы регулирования Интегральный закон регулирования Постоянную Т называют постоянной времени интегрирования.
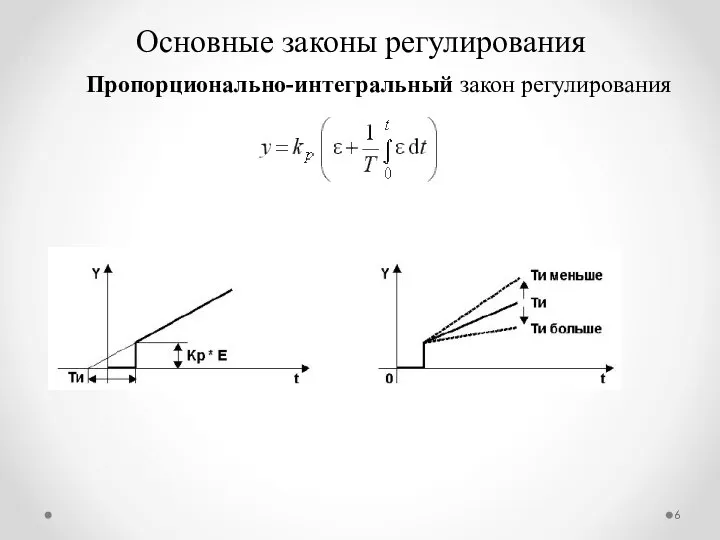
- 6. Основные законы регулирования Пропорционально-интегральный закон регулирования
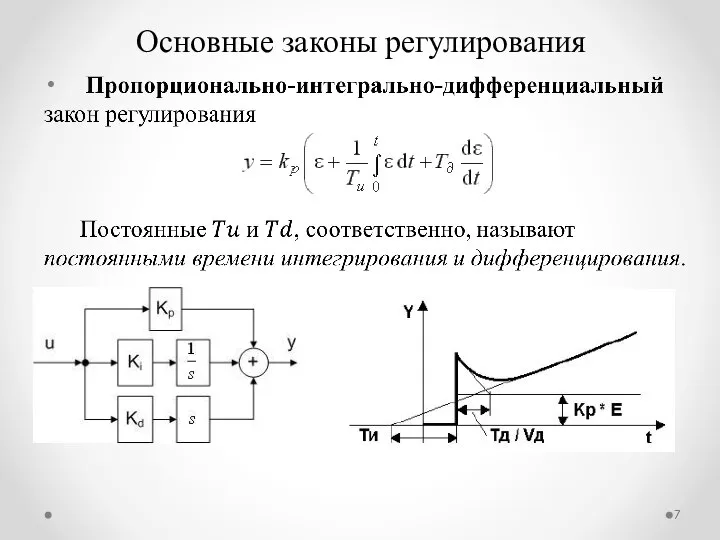
- 7. Основные законы регулирования
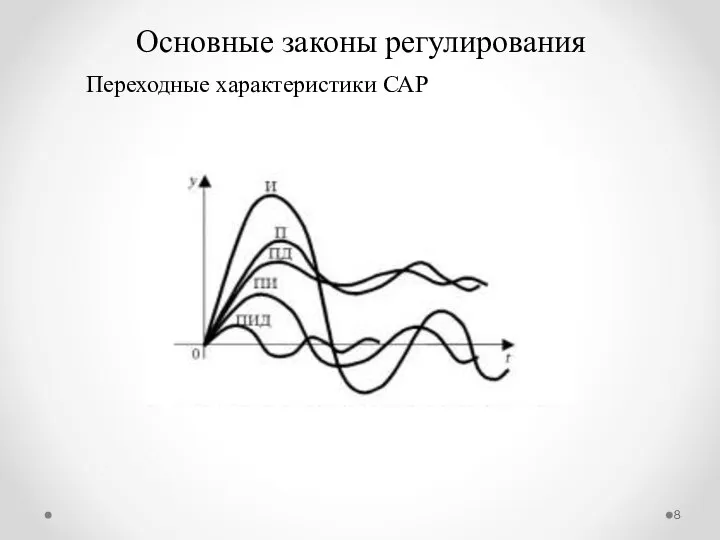
- 8. Основные законы регулирования Переходные характеристики САР
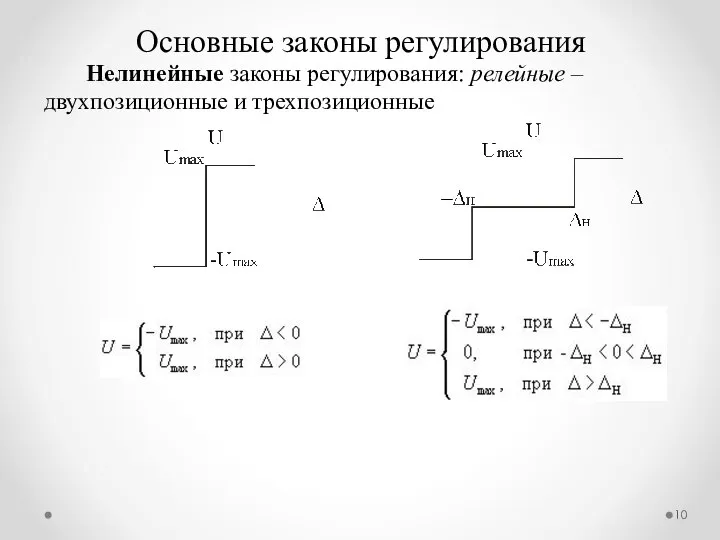
- 10. Основные законы регулирования Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
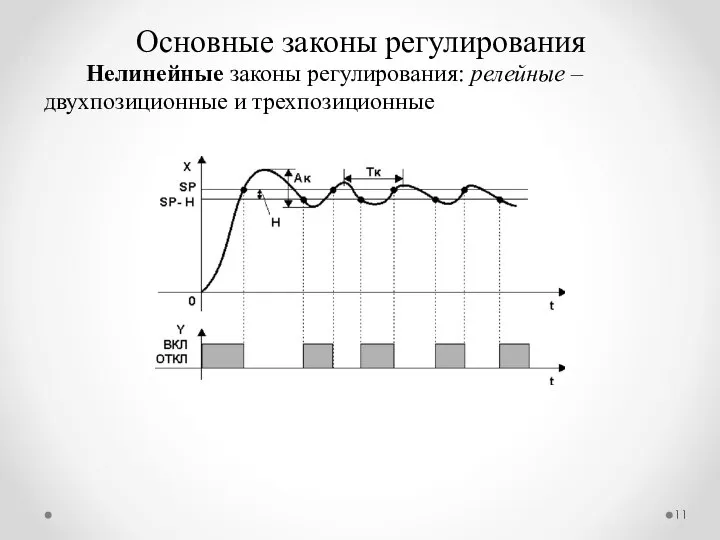
- 11. Основные законы регулирования Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
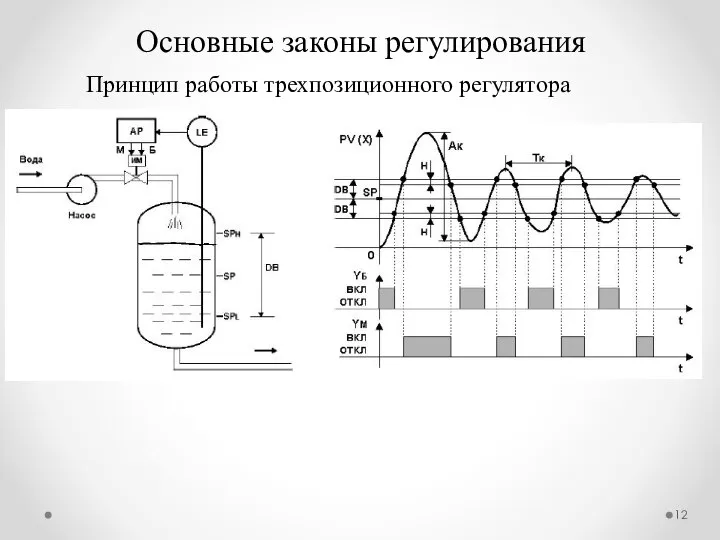
- 12. Основные законы регулирования Принцип работы трехпозиционного регулятора
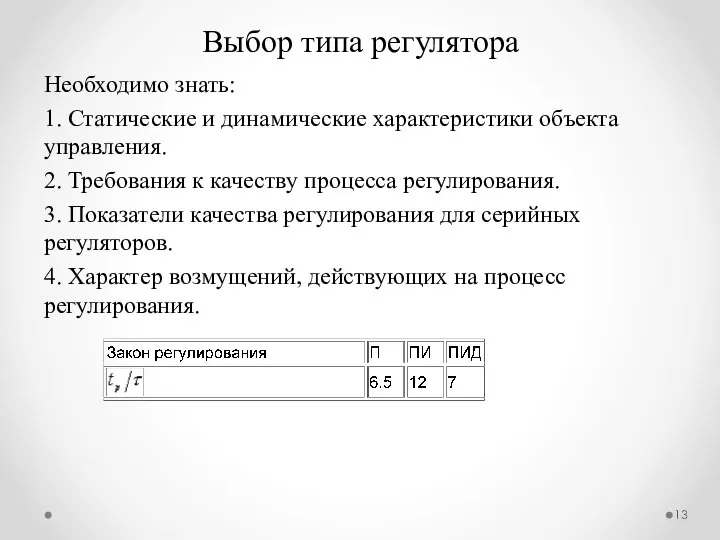
- 13. Выбор типа регулятора Необходимо знать: 1. Статические и динамические характеристики объекта управления. 2. Требования к качеству
- 14. Выбор типа регулятора ПИ-регулятор, который обладает следующими достоинствами: 1. Обеспечивает нулевую статическую ошибку регулирования. 2. Достаточно
- 15. Выбор типа регулятора релейный, непрерывный или цифровой регуляторы непрерывный или цифровой, ПИ- или ПИД-регулятор. использовать многоконтурные
- 17. Скачать презентацию
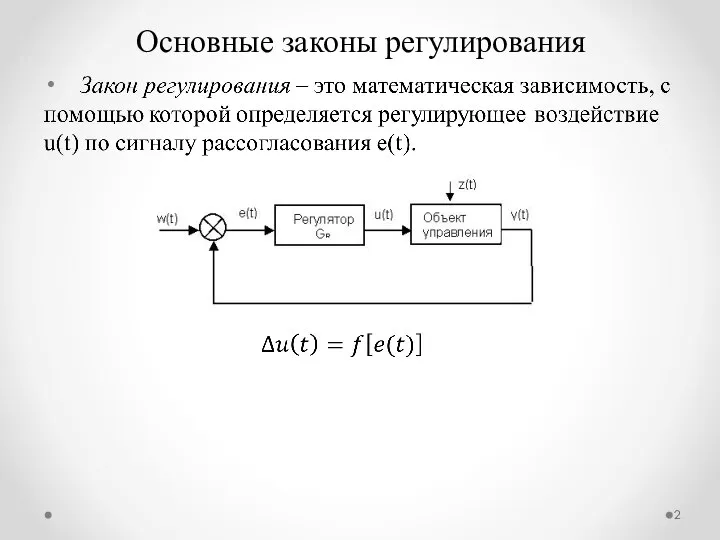
Слайд 3Основные законы регулирования
По характеру изменения регулирующего воздействия различают линейные и нелинейные
Основные законы регулирования
По характеру изменения регулирующего воздействия различают линейные и нелинейные
Слайд 4Основные законы регулирования
Пропорциональный закон регулирования
Постоянную kp называют коэффициентом передачи регулятора
Рабочая точка
Основные законы регулирования
Пропорциональный закон регулирования
Постоянную kp называют коэффициентом передачи регулятора
Рабочая точка
Слайд 5Основные законы регулирования
Интегральный закон регулирования
Постоянную Т называют постоянной времени интегрирования.
Основные законы регулирования
Интегральный закон регулирования
Постоянную Т называют постоянной времени интегрирования.
Слайд 6Основные законы регулирования
Пропорционально-интегральный закон регулирования
Основные законы регулирования
Пропорционально-интегральный закон регулирования
Слайд 7Основные законы регулирования
Основные законы регулирования
Слайд 8Основные законы регулирования
Переходные характеристики САР
Основные законы регулирования
Переходные характеристики САР
Слайд 10Основные законы регулирования
Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
Основные законы регулирования
Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
Слайд 11Основные законы регулирования
Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
Основные законы регулирования
Нелинейные законы регулирования: релейные – двухпозиционные и трехпозиционные
Слайд 12Основные законы регулирования
Принцип работы трехпозиционного регулятора
Основные законы регулирования
Принцип работы трехпозиционного регулятора
Слайд 13Выбор типа регулятора
Необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования
Выбор типа регулятора
Необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования
Слайд 14Выбор типа регулятора
ПИ-регулятор, который обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования.
2.
Выбор типа регулятора
ПИ-регулятор, который обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования.
2.
Слайд 15Выбор типа регулятора
релейный, непрерывный или цифровой регуляторы
непрерывный или цифровой, ПИ- или ПИД-регулятор.
использовать
Выбор типа регулятора
релейный, непрерывный или цифровой регуляторы
непрерывный или цифровой, ПИ- или ПИД-регулятор.
использовать
 Тема урока: «Ленд-лиз – дороги войны»
Тема урока: «Ленд-лиз – дороги войны» Основы организации и проведения занятий по служебно-боевой подготовке в подразделении
Основы организации и проведения занятий по служебно-боевой подготовке в подразделении ПОЗНАНИЕ окружающего мира
ПОЗНАНИЕ окружающего мира Правила борьбы с прокрастинации
Правила борьбы с прокрастинации Какое счастье быть полезным людям,учить Его Величество Народ!
Какое счастье быть полезным людям,учить Его Величество Народ! Растворимость
Растворимость ТЕХПОСТАВКА
ТЕХПОСТАВКА Викторина «Экология и физика»
Викторина «Экология и физика» Увлекательная этимология или Тайны русских слов
Увлекательная этимология или Тайны русских слов Zielony zakątek
Zielony zakątek Целеполагание в воспитательном процессе
Целеполагание в воспитательном процессе Интегрированный урок на закрепление знаний по математике, биологии с применением информационных технологий.Можно создавать тес
Интегрированный урок на закрепление знаний по математике, биологии с применением информационных технологий.Можно создавать тес Степень числа. Квадрат и куб числа
Степень числа. Квадрат и куб числа Конструкция и технология сооружения станций колонного типа
Конструкция и технология сооружения станций колонного типа Педсовет по воспитательной работе«совершенствование работы с родителями в условиях модернизации образовательного пр
Педсовет по воспитательной работе«совершенствование работы с родителями в условиях модернизации образовательного пр Портреты композиторов
Портреты композиторов Население России. Основные сословия.
Население России. Основные сословия. Тенденции развития и научно-технический прогресс в общественном питании
Тенденции развития и научно-технический прогресс в общественном питании 10189_7807308_13
10189_7807308_13 Правовой нигилизм и правовой идеализм Выполнила: студентка 1 курса юридического факультета группы ЮМ01/1301 Восколович Юлия Давай з
Правовой нигилизм и правовой идеализм Выполнила: студентка 1 курса юридического факультета группы ЮМ01/1301 Восколович Юлия Давай з ІСТОРІЯ СОЦІОЛОГІи
ІСТОРІЯ СОЦІОЛОГІи Финансовое мошенничество
Финансовое мошенничество Хвостовое хозяйство ОФ. Лекция 3
Хвостовое хозяйство ОФ. Лекция 3 Основные этапы работы с кадрами государственных и муниципальных служащих
Основные этапы работы с кадрами государственных и муниципальных служащих Презентация на тему Словообразование 5 класс
Презентация на тему Словообразование 5 класс  Алгебра 7 класс
Алгебра 7 класс Водно-солевой баланс и применение спортивных напитков
Водно-солевой баланс и применение спортивных напитков Стиль рококо
Стиль рококо