- Автоматизированные измерительные системы

Содержание
- 2. 1. Взаимодействие элементов в системе.
- 3. 2. Типовые структуры связей.
- 4. 3.1. Условия совместимости элементов системы. а) функциональной: - автономность; - полный набор ФМ; - функциональная законченность
- 5. 3.2. Условия совместимости элементов системы. d) конструктивной: Стандартизация конструктивных элементов и способов их сопряжения: - геометрических
- 6. 4. Обобщенная структура ИИС.
- 7. 5.1. Характеристики интерфейсов. Классификационные признаки. 1. Тип организации связей Структура системы шин для передачи информационных и
- 8. 5.2. Характеристики интерфейсов. Классификационные признаки. 4. Метод обмена - синхронный ; - асинхронный 5. Режим обмена
- 9. 6. Централизованное управление с передачей сигналов запроса.
- 10. 7. Децентрализованное управление с приоритетом по времени.
- 11. 8.1. Децентрализованное управление с арбитром.
- 12. 8.2. Децентрализованное управление с арбитром.
- 13. 9.1.Структурная организация измерительных каналов. Параллельная структура.
- 14. 9.2.Структурная организация измерительных каналов. Параллельно-последовательная структура.
- 15. 9.3.Структурная организация измерительных каналов. Сканирующая структура.
- 16. 9.4.Структурная организация измерительных каналов. Мультиплицированная структура.
- 17. 10. Временные диаграммы развертывающих напряжений.
- 18. 11.1. Методы компенсации Рисунок 16 а.) Аналоговая активная компенсация Рисунок 16 б.) Аналоговая пассивная компенсация
- 19. 11.2. Методы компенсации Рисунок 17 Цифровая компенсация Рисунок 18 а.) Цифро-аналоговая компенсация Рисунок 18 б.) Динамическая
- 20. 12. Нормализация и масштабирование преобразования.
- 21. 13. Структура измерительного канала Рисунок 23
- 22. 14.1.Способы подключения источников сигнала к нагрузке. Рисунок 24. Последовательное включение КЭ ( с отключением не выбранных
- 23. 14.2. Способы подключения источников сигнала к нагрузке Рисунок 26. Параллельное включение КЭ ( с закорачиванием не
- 24. 14.3. Способы подключения источников сигналов к нагрузке Ключ на транзисторе с p-n переходом Рисунок 29. Двухпроводное
- 25. 14.4. Способы подключения источников сигналов к нагрузке Рисунок 30. Ключ на МОП-транзисторах Рисунок 31. Коммутатор с
- 26. 15.1. Структуры коммутирующего поля Рисунок 32. Не связанные КЭ Рисунок 33. (1-n) - полюсник Матрица Входы
- 27. 15.2. Структуры коммутирующего поля Рисунок 35. Двухкаскадный (1-n) - полюсник Рисунок 36. Канальная структура
- 28. 15.3. Структуры коммутирующего поля Рисунок 37. Двухкаскадная матрица
- 29. 16. Коммутаторы аналоговых сигналов Характеристики: структурные; эксплуатационные; метрологические 1,I,2 – информационный канал связи 3, II –
- 30. 17.1. Исполнительная и управляющая части коммутатора Рисунок 39 Рисунок 40 Рисунок 41
- 31. 17.2. Исполнительная и управляющая части коммутатора Рисунок 42 Рисунок 43
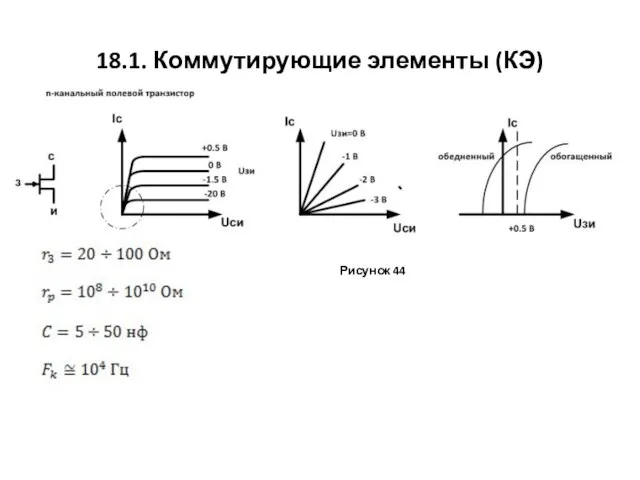
- 32. 18.1. Коммутирующие элементы (КЭ) Рисунок 44
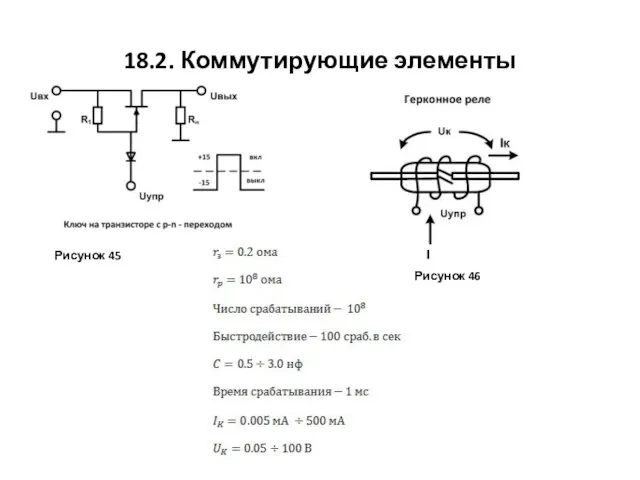
- 33. 18.2. Коммутирующие элементы Рисунок 45 Рисунок 46
- 34. 19.1 Погрешности коммутаторов 1. Эквивалентная схема ключа 2. Коммутация напряжений Рисунок 48 а.) Ключ замкнут Рисунок
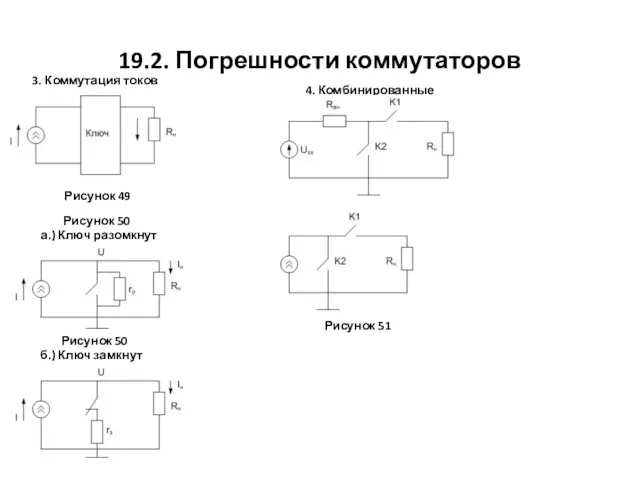
- 35. 19.2. Погрешности коммутаторов 3. Коммутация токов Рисунок 50 а.) Ключ разомкнут Рисунок 50 б.) Ключ замкнут
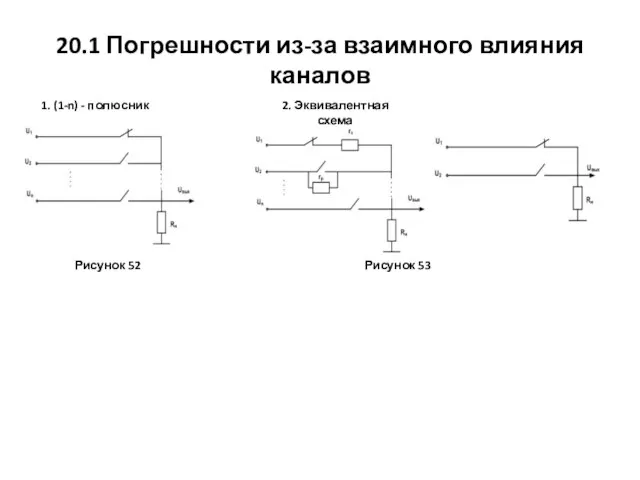
- 36. 20.1 Погрешности из-за взаимного влияния каналов 1. (1-n) - полюсник 2. Эквивалентная схема Рисунок 52 Рисунок
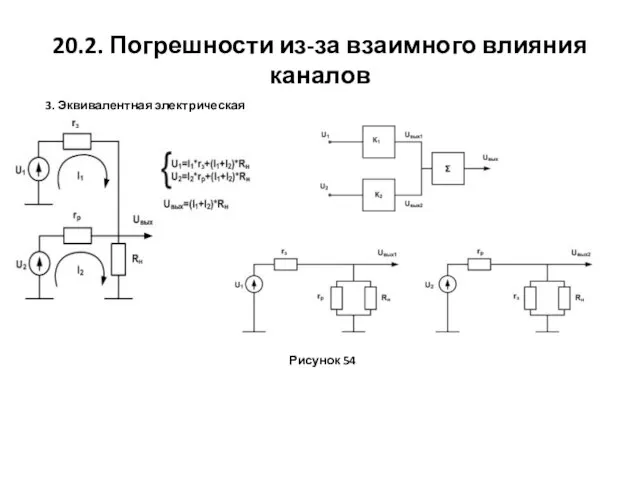
- 37. 20.2. Погрешности из-за взаимного влияния каналов 3. Эквивалентная электрическая схема Рисунок 54
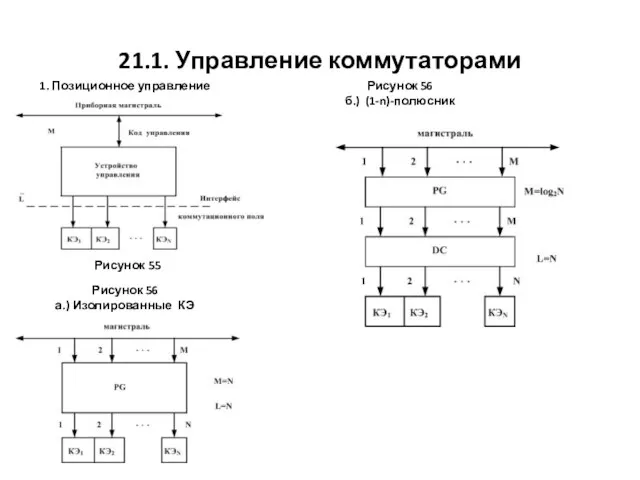
- 38. 21.1. Управление коммутаторами 1. Позиционное управление Рисунок 56 а.) Изолированные КЭ Рисунок 56 б.) (1-n)-полюсник Рисунок
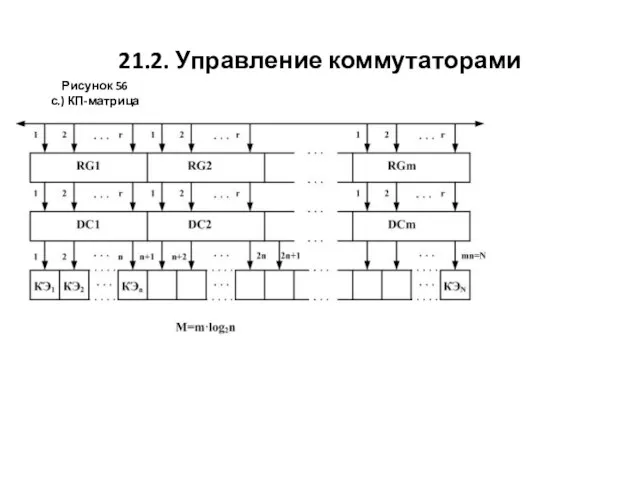
- 39. 21.2. Управление коммутаторами Рисунок 56 с.) КП-матрица
- 40. 21.3. Управление коммутаторами 2. Двухкоординатное управление Рисунок 57
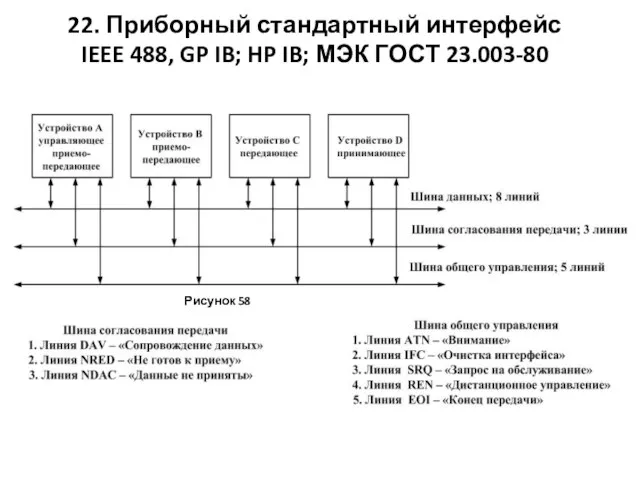
- 41. 22. Приборный стандартный интерфейс IEEE 488, GP IB; HP IB; МЭК ГОСТ 23.003-80 Рисунок 58
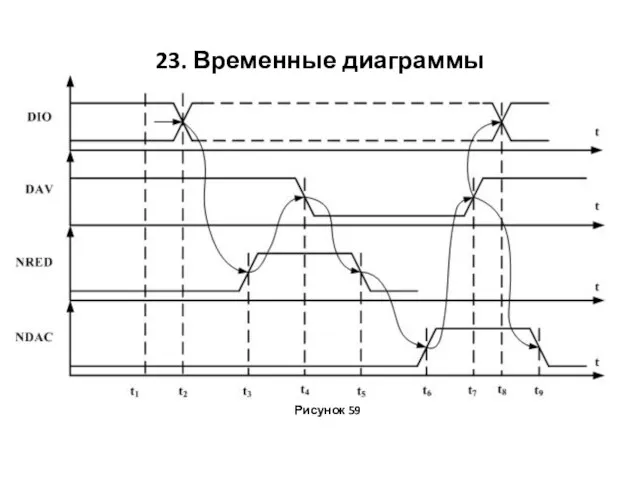
- 42. 23. Временные диаграммы Рисунок 59
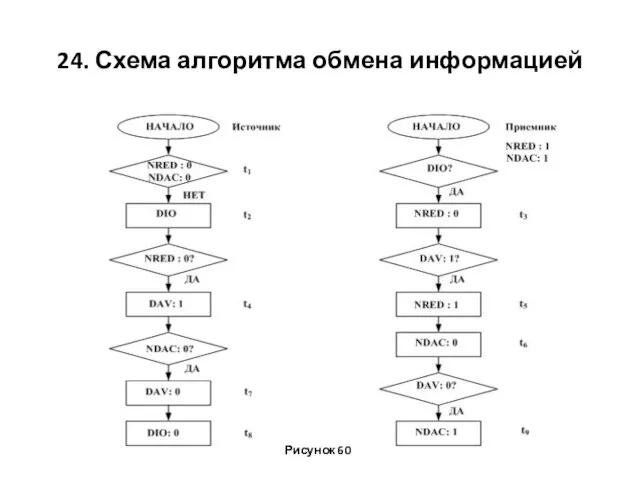
- 43. 24. Схема алгоритма обмена информацией Рисунок 60
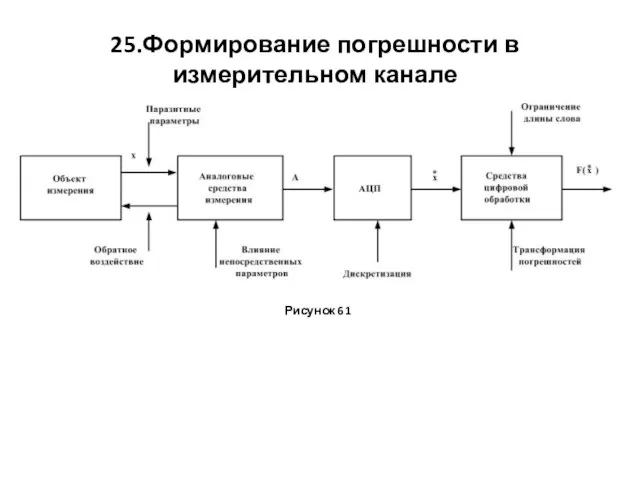
- 44. 25.Формирование погрешности в измерительном канале Рисунок 61
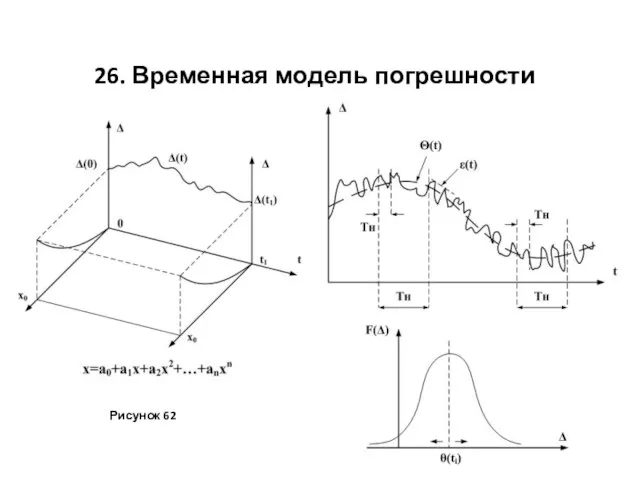
- 45. 26. Временная модель погрешности Рисунок 62
- 47. Скачать презентацию

Слайд 32. Типовые структуры связей.
2. Типовые структуры связей.

Слайд 43.1. Условия совместимости элементов системы.
а) функциональной:
- автономность;
- полный набор ФМ;
- функциональная законченность
3.1. Условия совместимости элементов системы.
а) функциональной:
- автономность;
- полный набор ФМ;
- функциональная законченность
Слайд 53.2. Условия совместимости элементов системы.
d) конструктивной:
Стандартизация конструктивных элементов и способов их сопряжения:
-
3.2. Условия совместимости элементов системы.
d) конструктивной:
Стандартизация конструктивных элементов и способов их сопряжения:
-
Слайд 64. Обобщенная структура ИИС.
4. Обобщенная структура ИИС.

Слайд 75.1. Характеристики интерфейсов.
Классификационные признаки.
1. Тип организации связей
Структура системы шин для передачи информационных
5.1. Характеристики интерфейсов.
Классификационные признаки.
1. Тип организации связей
Структура системы шин для передачи информационных
Слайд 85.2. Характеристики интерфейсов.
Классификационные признаки.
4. Метод обмена
- синхронный ;
- асинхронный
5. Режим обмена
- симплексный;
-
5.2. Характеристики интерфейсов.
Классификационные признаки.
4. Метод обмена
- синхронный ;
- асинхронный
5. Режим обмена
- симплексный;
-
Слайд 96. Централизованное управление с передачей
сигналов запроса.
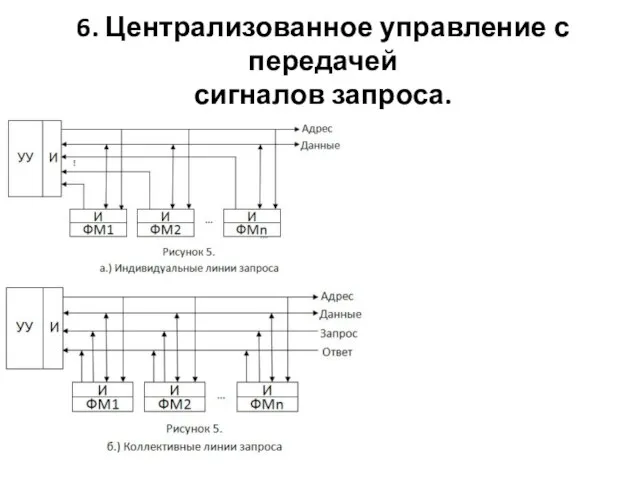
6. Централизованное управление с передачей
сигналов запроса.
Слайд 107. Децентрализованное управление
с приоритетом по времени.
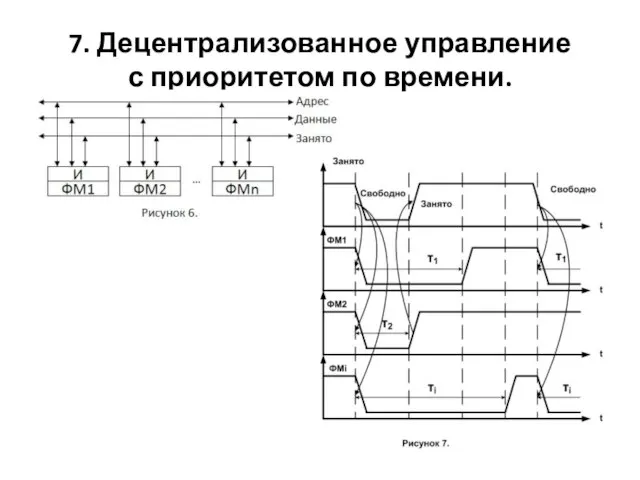
7. Децентрализованное управление
с приоритетом по времени.
Слайд 118.1. Децентрализованное управление с арбитром.
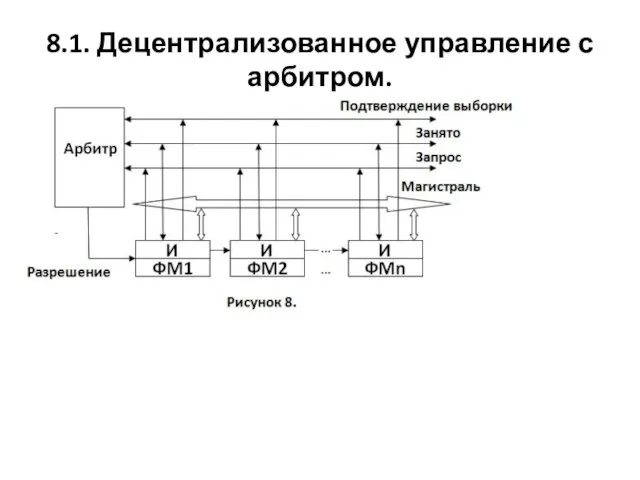
8.1. Децентрализованное управление с арбитром.
Слайд 128.2. Децентрализованное управление с арбитром.
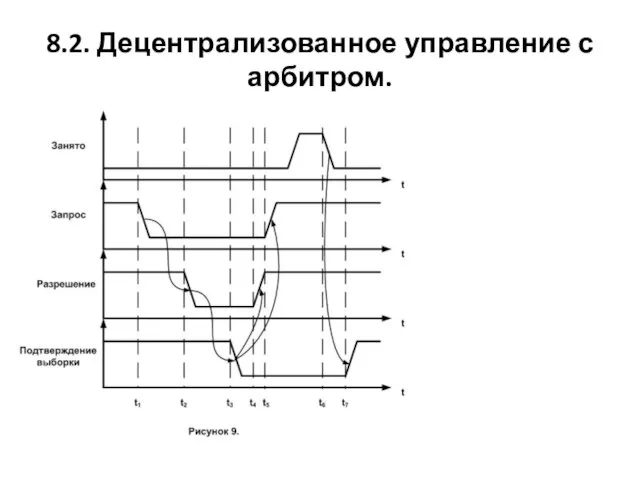
8.2. Децентрализованное управление с арбитром.
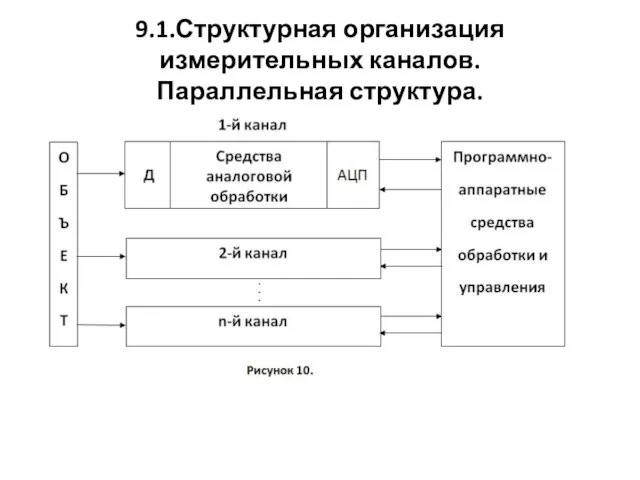
Слайд 139.1.Структурная организация измерительных каналов.
Параллельная структура.
9.1.Структурная организация измерительных каналов.
Параллельная структура.
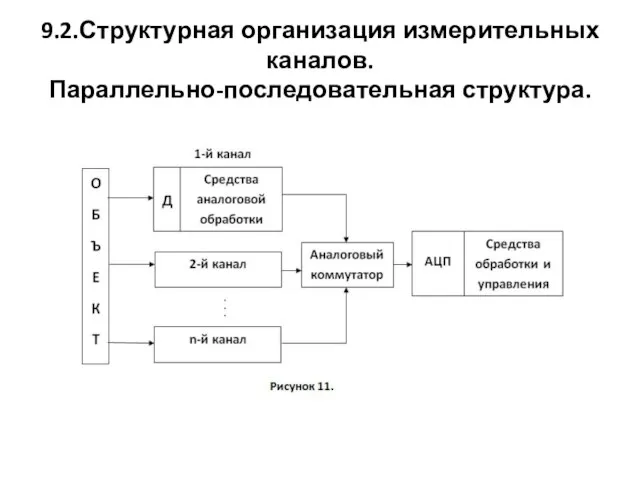
Слайд 149.2.Структурная организация измерительных каналов.
Параллельно-последовательная структура.
9.2.Структурная организация измерительных каналов.
Параллельно-последовательная структура.
Слайд 159.3.Структурная организация измерительных каналов.
Сканирующая структура.
9.3.Структурная организация измерительных каналов.
Сканирующая структура.

Слайд 169.4.Структурная организация измерительных каналов.
Мультиплицированная структура.
9.4.Структурная организация измерительных каналов.
Мультиплицированная структура.

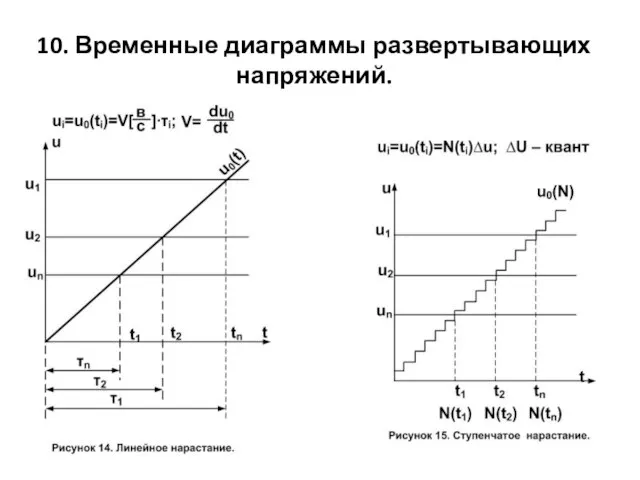
Слайд 1710. Временные диаграммы развертывающих напряжений.
10. Временные диаграммы развертывающих напряжений.
Слайд 1811.1. Методы компенсации
Рисунок 16
а.) Аналоговая активная компенсация
Рисунок 16
б.) Аналоговая пассивная компенсация
11.1. Методы компенсации
Рисунок 16
а.) Аналоговая активная компенсация
Рисунок 16
б.) Аналоговая пассивная компенсация

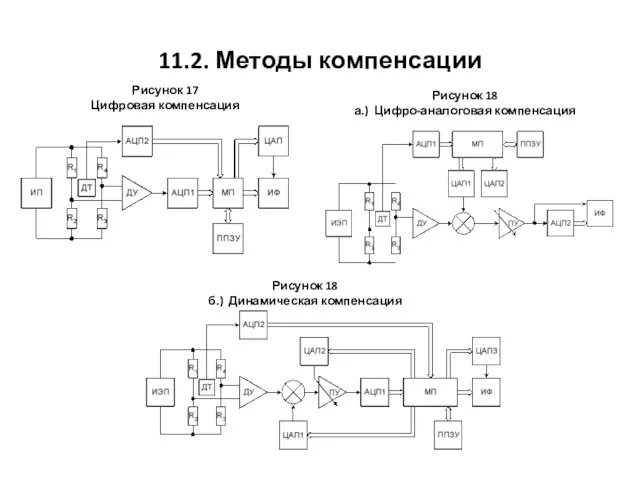
Слайд 1911.2. Методы компенсации
Рисунок 17
Цифровая компенсация
Рисунок 18
а.) Цифро-аналоговая компенсация
Рисунок 18
б.) Динамическая компенсация
11.2. Методы компенсации
Рисунок 17
Цифровая компенсация
Рисунок 18
а.) Цифро-аналоговая компенсация
Рисунок 18
б.) Динамическая компенсация
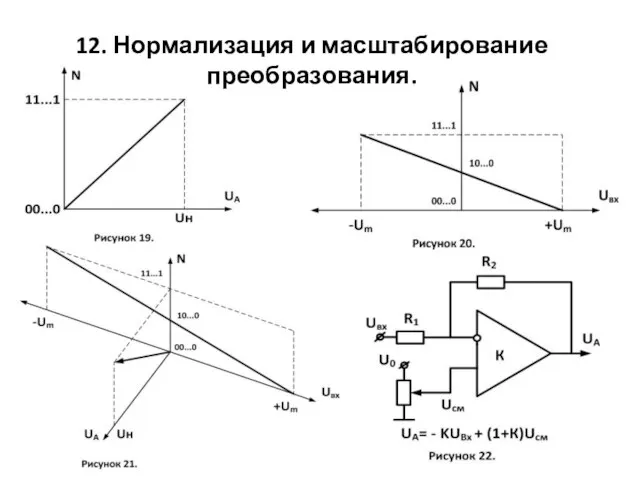
Слайд 2012. Нормализация и масштабирование преобразования.
12. Нормализация и масштабирование преобразования.
Слайд 2113. Структура измерительного канала
Рисунок 23
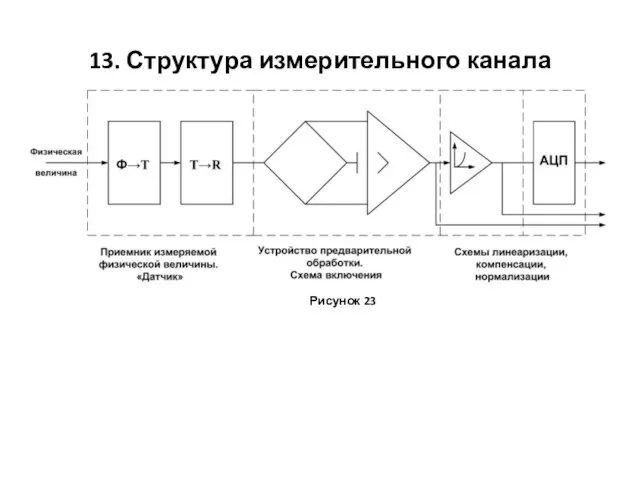
13. Структура измерительного канала
Рисунок 23
Слайд 2214.1.Способы подключения источников сигнала к нагрузке.
Рисунок 24. Последовательное включение КЭ
( с отключением
14.1.Способы подключения источников сигнала к нагрузке.
Рисунок 24. Последовательное включение КЭ
( с отключением
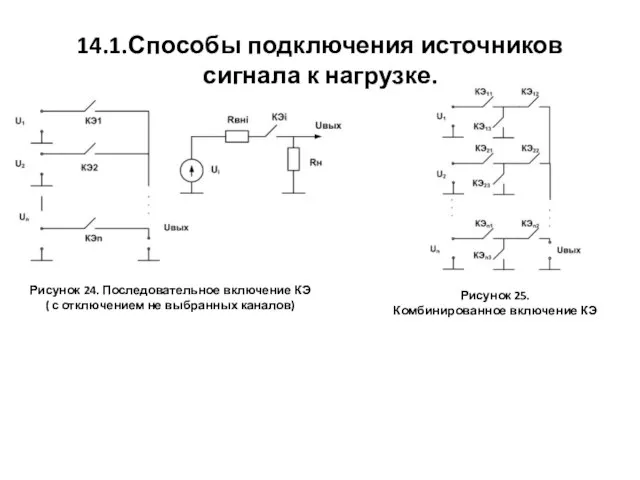
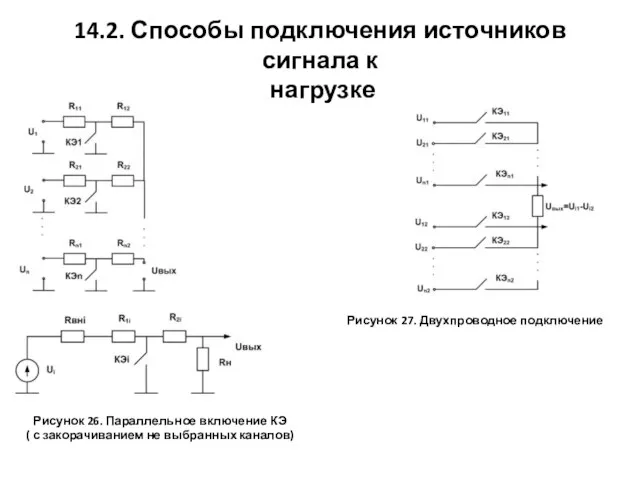
Слайд 2314.2. Способы подключения источников сигнала к
нагрузке
Рисунок 26. Параллельное включение КЭ
( с
14.2. Способы подключения источников сигнала к
нагрузке
Рисунок 26. Параллельное включение КЭ
( с
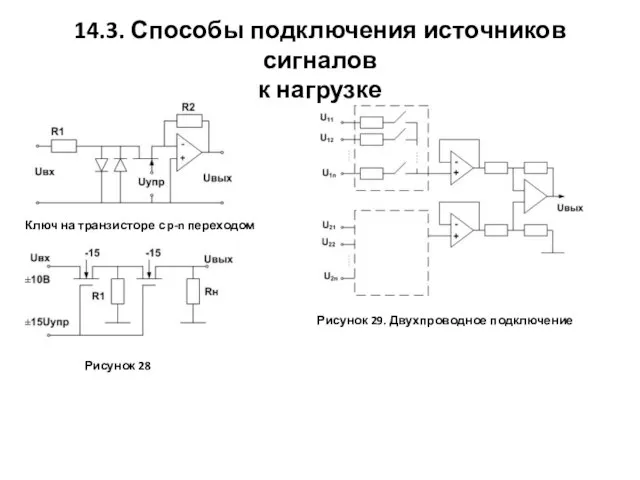
Слайд 2414.3. Способы подключения источников сигналов
к нагрузке
Ключ на транзисторе с p-n переходом
Рисунок 29.
14.3. Способы подключения источников сигналов
к нагрузке
Ключ на транзисторе с p-n переходом
Рисунок 29.
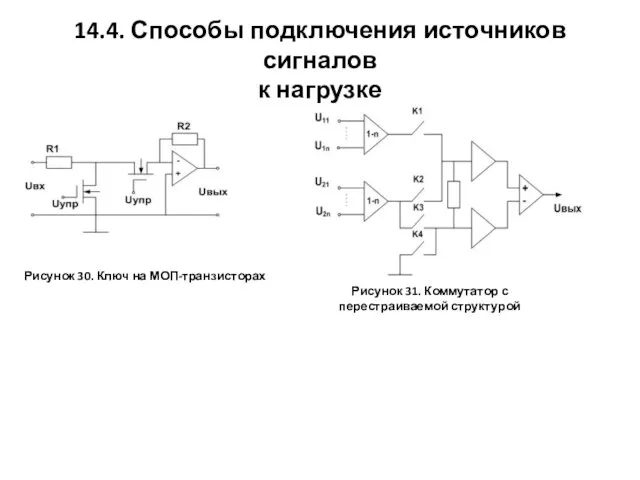
Слайд 2514.4. Способы подключения источников сигналов
к нагрузке
Рисунок 30. Ключ на МОП-транзисторах
Рисунок 31. Коммутатор
14.4. Способы подключения источников сигналов
к нагрузке
Рисунок 30. Ключ на МОП-транзисторах
Рисунок 31. Коммутатор
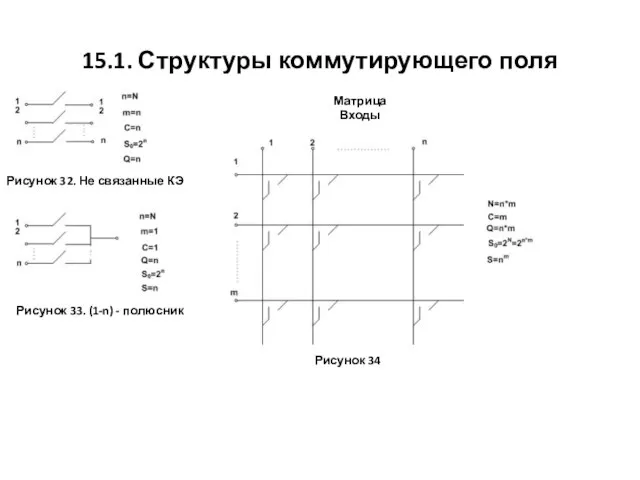
Слайд 2615.1. Структуры коммутирующего поля
Рисунок 32. Не связанные КЭ
Рисунок 33. (1-n) - полюсник
Матрица
Входы
Рисунок
15.1. Структуры коммутирующего поля
Рисунок 32. Не связанные КЭ
Рисунок 33. (1-n) - полюсник
Матрица
Входы
Рисунок
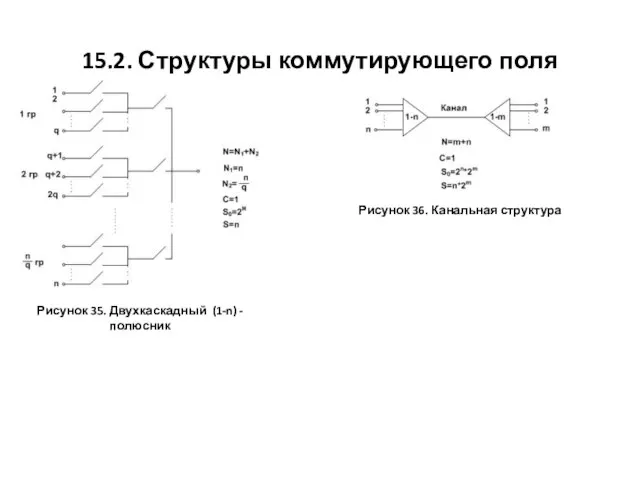
Слайд 2715.2. Структуры коммутирующего поля
Рисунок 35. Двухкаскадный (1-n) - полюсник
Рисунок 36. Канальная структура
15.2. Структуры коммутирующего поля
Рисунок 35. Двухкаскадный (1-n) - полюсник
Рисунок 36. Канальная структура
Слайд 2815.3. Структуры коммутирующего поля
Рисунок 37. Двухкаскадная матрица
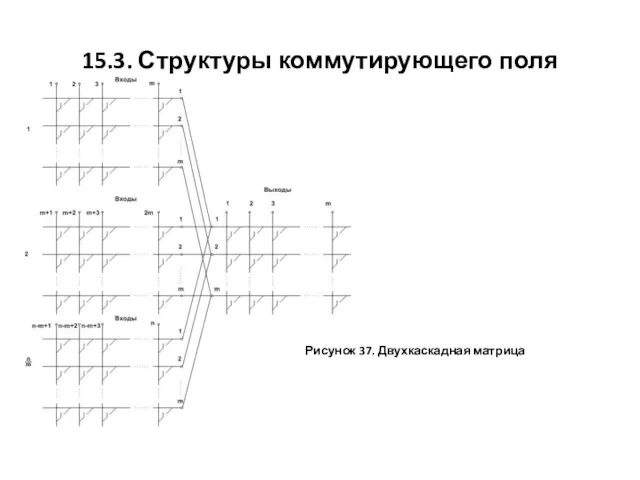
15.3. Структуры коммутирующего поля
Рисунок 37. Двухкаскадная матрица
Слайд 2916. Коммутаторы аналоговых сигналов
Характеристики:
структурные;
эксплуатационные;
метрологические
1,I,2 – информационный канал связи
3, II – канал перестройки
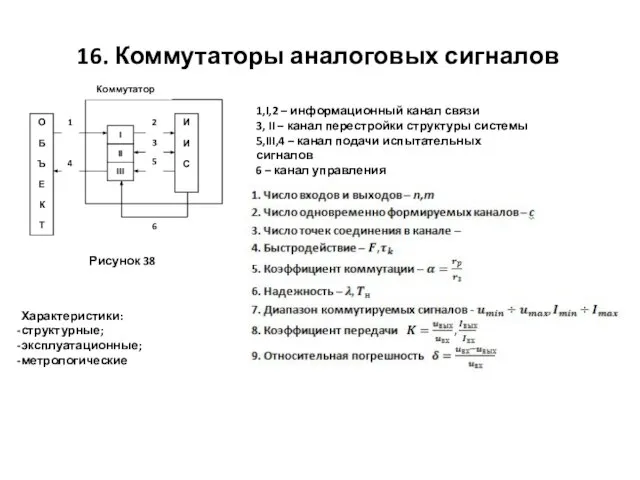
16. Коммутаторы аналоговых сигналов
Характеристики:
структурные;
эксплуатационные;
метрологические
1,I,2 – информационный канал связи
3, II – канал перестройки
Слайд 3017.1. Исполнительная и управляющая
части коммутатора
Рисунок 39
Рисунок 40
Рисунок 41
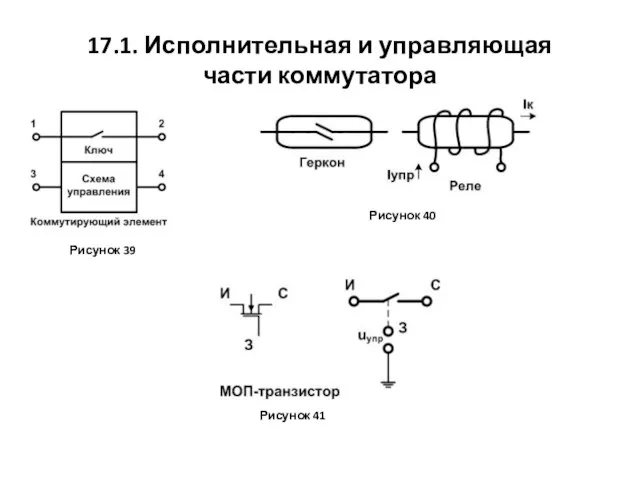
17.1. Исполнительная и управляющая
части коммутатора
Рисунок 39
Рисунок 40
Рисунок 41
Слайд 3117.2. Исполнительная и управляющая части коммутатора
Рисунок 42
Рисунок 43
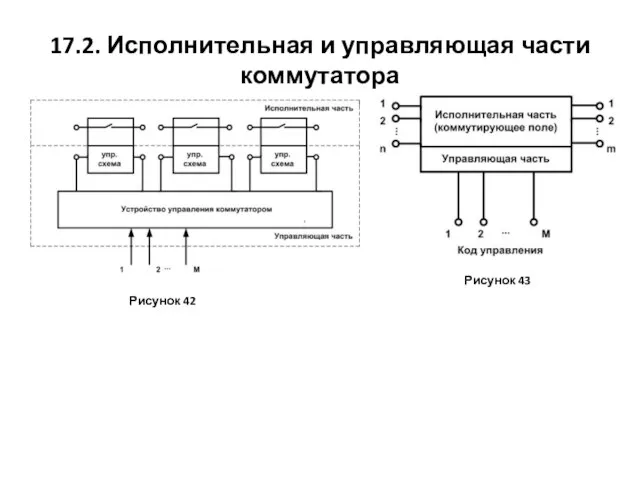
17.2. Исполнительная и управляющая части коммутатора
Рисунок 42
Рисунок 43
Слайд 3218.1. Коммутирующие элементы (КЭ)
Рисунок 44
18.1. Коммутирующие элементы (КЭ)
Рисунок 44
Слайд 3318.2. Коммутирующие элементы
Рисунок 45
Рисунок 46
18.2. Коммутирующие элементы
Рисунок 45
Рисунок 46
Слайд 3419.1 Погрешности коммутаторов
1. Эквивалентная схема ключа
2. Коммутация напряжений
Рисунок 48
а.) Ключ замкнут
Рисунок
19.1 Погрешности коммутаторов
1. Эквивалентная схема ключа
2. Коммутация напряжений
Рисунок 48
а.) Ключ замкнут
Рисунок

Слайд 3519.2. Погрешности коммутаторов
3. Коммутация токов
Рисунок 50
а.) Ключ разомкнут
Рисунок 50
19.2. Погрешности коммутаторов
3. Коммутация токов
Рисунок 50
а.) Ключ разомкнут
Рисунок 50
Слайд 3620.1 Погрешности из-за взаимного влияния каналов
1. (1-n) - полюсник
2. Эквивалентная схема
Рисунок 52
Рисунок
20.1 Погрешности из-за взаимного влияния каналов
1. (1-n) - полюсник
2. Эквивалентная схема
Рисунок 52
Рисунок
Слайд 3720.2. Погрешности из-за взаимного влияния каналов
3. Эквивалентная электрическая схема
Рисунок 54
20.2. Погрешности из-за взаимного влияния каналов
3. Эквивалентная электрическая схема
Рисунок 54
Слайд 3821.1. Управление коммутаторами
1. Позиционное управление
Рисунок 56
а.) Изолированные КЭ
Рисунок 56
б.) (1-n)-полюсник
Рисунок 55
21.1. Управление коммутаторами
1. Позиционное управление
Рисунок 56
а.) Изолированные КЭ
Рисунок 56
б.) (1-n)-полюсник
Рисунок 55
Слайд 3921.2. Управление коммутаторами
Рисунок 56
с.) КП-матрица
21.2. Управление коммутаторами
Рисунок 56
с.) КП-матрица
Слайд 4021.3. Управление коммутаторами
2. Двухкоординатное управление
Рисунок 57
21.3. Управление коммутаторами
2. Двухкоординатное управление
Рисунок 57

Слайд 4122. Приборный стандартный интерфейс IEEE 488, GP IB; HP IB; МЭК ГОСТ
22. Приборный стандартный интерфейс IEEE 488, GP IB; HP IB; МЭК ГОСТ
Слайд 4223. Временные диаграммы
Рисунок 59
23. Временные диаграммы
Рисунок 59
Слайд 4324. Схема алгоритма обмена информацией
Рисунок 60
24. Схема алгоритма обмена информацией
Рисунок 60
Слайд 4425.Формирование погрешности в измерительном канале
Рисунок 61
25.Формирование погрешности в измерительном канале
Рисунок 61
Слайд 4526. Временная модель погрешности
Рисунок 62
26. Временная модель погрешности
Рисунок 62
 «Эра подозрения» как пример синтеза критической и умозрительной установок
«Эра подозрения» как пример синтеза критической и умозрительной установок Глиняная игрушка Белогорья
Глиняная игрушка Белогорья Здоровьесберегающие технологии на уроках истории и обществознания
Здоровьесберегающие технологии на уроках истории и обществознания Борьба народов с западными завоевателями
Борьба народов с западными завоевателями Теория дифференциальной ассоциации
Теория дифференциальной ассоциации Во главе христианского мира
Во главе христианского мира Игра Самый умный
Игра Самый умный Легкая атлетика
Легкая атлетика Графика
Графика Эмоции
Эмоции Академия новостей Academ.info
Академия новостей Academ.info Правила защиты от мошенников
Правила защиты от мошенников Урок русского языка в 5 классе.
Урок русского языка в 5 классе. Конкурс рецептов блинов Народны
Конкурс рецептов блинов Народны СОВРЕМЕННЫЕ ПРОБЛЕМЫ РАЗВИТИЯ ОБРАЗОВАНИЯ В УСЛОВИЯХ СИСТЕМНЫХ ИЗМЕНЕНИЙ
СОВРЕМЕННЫЕ ПРОБЛЕМЫ РАЗВИТИЯ ОБРАЗОВАНИЯ В УСЛОВИЯХ СИСТЕМНЫХ ИЗМЕНЕНИЙ 1 Конкурентное сравнение Какой погрузчик выбрали Вы? ©2006 Gehl Company All Rights Reserved.
1 Конкурентное сравнение Какой погрузчик выбрали Вы? ©2006 Gehl Company All Rights Reserved. Nationalities
Nationalities  Кемлянская средняя школа
Кемлянская средняя школа Орнаменты Древней Греции
Орнаменты Древней Греции Решение проблемы загруженности участка дороги : Площадь Василевского
Решение проблемы загруженности участка дороги : Площадь Василевского Псалом 2
Псалом 2 СИМФОНИЧЕСКИЙ ОРКЕСТР
СИМФОНИЧЕСКИЙ ОРКЕСТР Караульная служба. Тема 4
Караульная служба. Тема 4 Виды предложений по цели высказывания
Виды предложений по цели высказывания БАНКЕТНЫЙ ЗАЛ
БАНКЕТНЫЙ ЗАЛ Различные способы решения текстовых задач
Различные способы решения текстовых задач ОС Windows Пакет FAR
ОС Windows Пакет FAR Презентация Языкового Клуба
Презентация Языкового Клуба