- Движение тела под действием силы Стокса в вязкой среде

Содержание
- 2. Цели работы нахождение подходящей среды для реализации таких типов задач нахождение методов перехода от физического решения
- 3. Постановка задачи физическая постановка задачи цель моделирования анализ объекта Разработка модели физическая модель математическая модель компьютерная
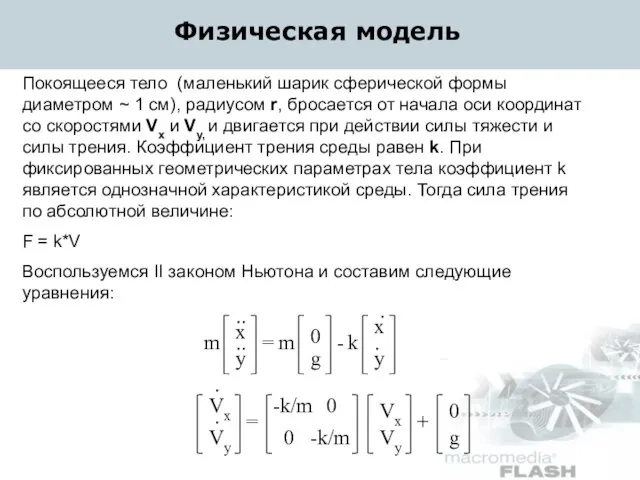
- 4. Покоящееся тело (маленький шарик сферической формы диаметром ~ 1 cм), радиусом r, бросается от начала оси
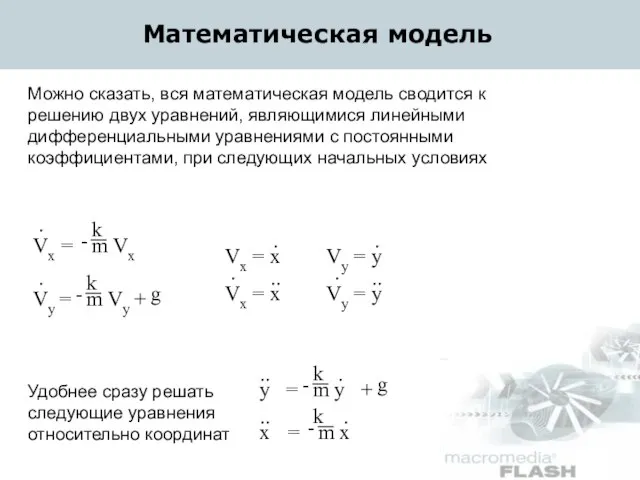
- 5. Математическая модель Можно сказать, вся математическая модель сводится к решению двух уравнений, являющимися линейными дифференциальными уравнениями
- 6. Математическая модель Мы получаем две задачи Коши: x = - x x(0) = Vox x(0) =
- 7. Условно эту часть работы можно разбить на три: 1)Создание главных объектов (сетки, шарика и кнопок) и
- 8. прорисовка шарика, координатной сетки, кнопок управления Создание главных объектов снабжение их программными кодами первоначальное тестирование системы
- 9. Интерфейс регуляторы для ввода начальных данных возможность управления временем режимы проведения эксперимента программная реализация тестирование кода
- 10. Средства вывода динамические поля вывода графики замена условных величин на фактические
- 11. Проведение опытов выбор режима изменение начальных данных построение графиков
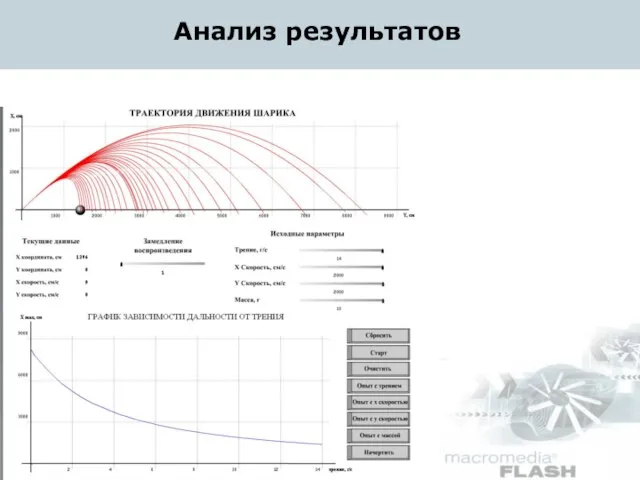
- 12. Анализ результатов
- 14. Скачать презентацию
Слайд 2Цели работы
нахождение подходящей среды для реализации таких типов задач
нахождение методов перехода от
Цели работы
нахождение подходящей среды для реализации таких типов задач
нахождение методов перехода от
Слайд 3Постановка задачи
физическая постановка задачи
цель моделирования
анализ объекта
Разработка модели
физическая модель
Постановка задачи
физическая постановка задачи
цель моделирования
анализ объекта
Разработка модели
физическая модель
Слайд 4Покоящееся тело (маленький шарик сферической формы диаметром ~ 1 cм), радиусом r,
Покоящееся тело (маленький шарик сферической формы диаметром ~ 1 cм), радиусом r,
Слайд 5Математическая модель
Можно сказать, вся математическая модель сводится к решению двух уравнений, являющимися
Математическая модель
Можно сказать, вся математическая модель сводится к решению двух уравнений, являющимися
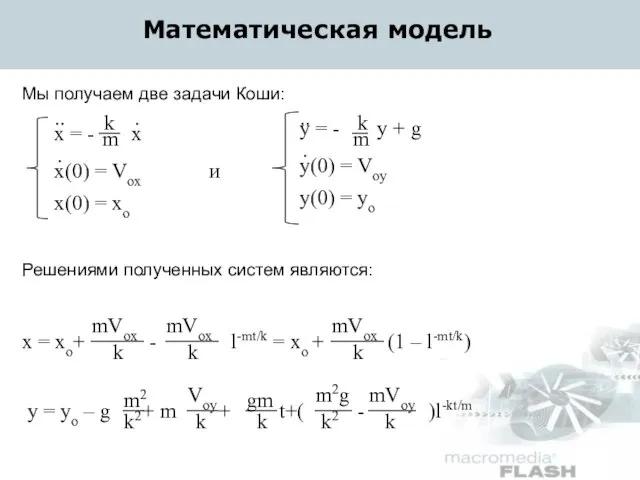
Слайд 6Математическая модель
Мы получаем две задачи Коши:
x = - x
x(0) = Vox
x(0)
Математическая модель
Мы получаем две задачи Коши:
x = - x
x(0) = Vox
x(0)
Слайд 7Условно эту часть работы можно разбить на три:
1)Создание главных объектов (сетки,
Условно эту часть работы можно разбить на три:
1)Создание главных объектов (сетки,
Слайд 8прорисовка шарика, координатной сетки, кнопок управления
Создание главных объектов
снабжение их программными кодами
первоначальное тестирование
прорисовка шарика, координатной сетки, кнопок управления
Создание главных объектов
снабжение их программными кодами
первоначальное тестирование

Слайд 9Интерфейс
регуляторы для ввода начальных данных
возможность управления временем
режимы проведения эксперимента
программная реализация
тестирование кода
Интерфейс
регуляторы для ввода начальных данных
возможность управления временем
режимы проведения эксперимента
программная реализация
тестирование кода
Слайд 10Средства вывода
динамические поля вывода
графики
замена условных величин на фактические
Средства вывода
динамические поля вывода
графики
замена условных величин на фактические
Слайд 11Проведение опытов
выбор режима
изменение начальных данных
построение графиков
Проведение опытов
выбор режима
изменение начальных данных
построение графиков
Слайд 12Анализ результатов
Анализ результатов
 АВС Модуль 3
АВС Модуль 3 Почва растительность животный мир рельеф деятельность человека горные породы воды время климат Почвообразующие факторы.
Почва растительность животный мир рельеф деятельность человека горные породы воды время климат Почвообразующие факторы. Презентация на тему Абхазия
Презентация на тему Абхазия Эвипак Индастриз
Эвипак Индастриз Проверка домашнего задания
Проверка домашнего задания Сетевая подсистема Windows
Сетевая подсистема Windows Деятельность как содержание образования в предметной области «Искусство»
Деятельность как содержание образования в предметной области «Искусство» Об утверждении Порядка организации подготовки кадров для замещения должностей в органах внутренних дел Российской Федерации
Об утверждении Порядка организации подготовки кадров для замещения должностей в органах внутренних дел Российской Федерации О жизни и творчестве С.А. Есенина
О жизни и творчестве С.А. Есенина Ловля и передача мяча в движении бегом. Броски в кольцо
Ловля и передача мяча в движении бегом. Броски в кольцо Моделі навколо нас
Моделі навколо нас Общая характеристика воображения. Виды воображения
Общая характеристика воображения. Виды воображения Окружающий мир. 2 класс. Окружающий мир. 2 класс. Программа «Перспективная начальная школа». Авторы: О.Н.Фетотова,Г.В.Трафимова,С.А
Окружающий мир. 2 класс. Окружающий мир. 2 класс. Программа «Перспективная начальная школа». Авторы: О.Н.Фетотова,Г.В.Трафимова,С.А Значение чтения
Значение чтения Ұлттық таба нан өніміне ақпараттық шолу жасау; таба нанның сапа көрсеткіштерін анықтау
Ұлттық таба нан өніміне ақпараттық шолу жасау; таба нанның сапа көрсеткіштерін анықтау Древние Соборы
Древние Соборы Формирование ценностных ориентаций младшего школьника в современной информационной среде
Формирование ценностных ориентаций младшего школьника в современной информационной среде Платформа 2010 SQL Server 2008, восстановление при катастрофических сбоях Microsoft Дмитрий Артемов.
Платформа 2010 SQL Server 2008, восстановление при катастрофических сбоях Microsoft Дмитрий Артемов. Акцентуации характера
Акцентуации характера Упр ИТ
Упр ИТ Полдник. Время есть булочки
Полдник. Время есть булочки Презентация на тему Food and drink (Еда и напитки)
Презентация на тему Food and drink (Еда и напитки) Динамика физиологического и эмоционального состояния больных сердечно-сосудистыми заболеваниями в процессе музыкальной терапи
Динамика физиологического и эмоционального состояния больных сердечно-сосудистыми заболеваниями в процессе музыкальной терапи Проект iknowwhatyoudownload.com анализирует трафик в файлообменных сетях
Проект iknowwhatyoudownload.com анализирует трафик в файлообменных сетях Презентация "Жостовский букет" - скачать презентации по МХК
Презентация "Жостовский букет" - скачать презентации по МХК 31 МАЯВСЕМИРНЫЙ ДЕНЬ БЕЗ ТАБАКА
31 МАЯВСЕМИРНЫЙ ДЕНЬ БЕЗ ТАБАКА Домовой. Дух и защитник дома
Домовой. Дух и защитник дома Инновационная экономика и технологическое предпринимательство
Инновационная экономика и технологическое предпринимательство