- Электрическая схема приводов трехподвижного манипулятора. Практическое занятие 4

Содержание
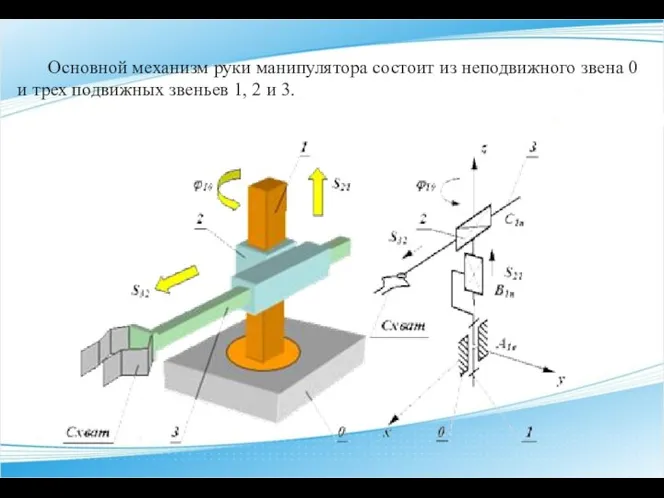
- 2. Основной механизм руки манипулятора состоит из неподвижного звена 0 и трех подвижных звеньев 1, 2 и
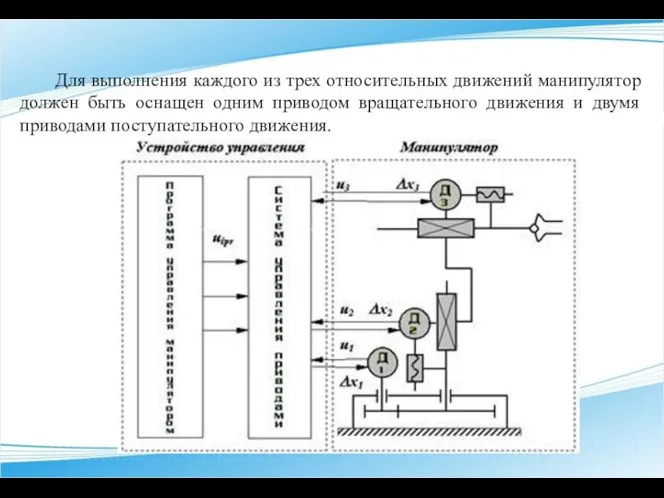
- 3. Для выполнения каждого из трех относительных движений манипулятор должен быть оснащен одним приводом вращательного движения и
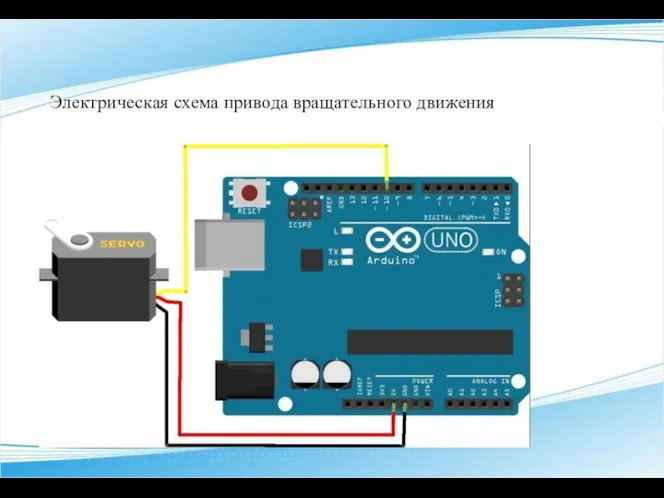
- 4. В качестве привода вращательного движения принимаем сервопривод Micro Servo 99.
- 5. В качестве привода поступательного движения принимаем шаговый двигатель 28BYJ с платой управления.
- 6. Электрическая схема привода вращательного движения
- 7. Электрическая схема привода поступательного движения
- 9. Скачать презентацию
Слайд 3
Для выполнения каждого из трех относительных движений манипулятор должен быть
Для выполнения каждого из трех относительных движений манипулятор должен быть
Слайд 4 В качестве привода вращательного движения принимаем сервопривод Micro Servo 99.
В качестве привода вращательного движения принимаем сервопривод Micro Servo 99.

Слайд 5 В качестве привода поступательного движения принимаем шаговый двигатель 28BYJ с платой управления.
В качестве привода поступательного движения принимаем шаговый двигатель 28BYJ с платой управления.

Слайд 6 Электрическая схема привода вращательного движения
Электрическая схема привода вращательного движения
Слайд 7 Электрическая схема привода поступательного движения
Электрическая схема привода поступательного движения

 Догосударственный период в истории восточных славян
Догосударственный период в истории восточных славян Предельные одноосновные карбоновые кислоты
Предельные одноосновные карбоновые кислоты В.И. Гау. Николай I на смертном одре.
В.И. Гау. Николай I на смертном одре. Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA
Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA Нурсултан Назарбаев
Нурсултан Назарбаев  Тестовая презентация
Тестовая презентация Природно-ресурсный потенциал равнинных территорий
Природно-ресурсный потенциал равнинных территорий ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ
ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ Чем отличается малый бизнес от бизнеса большого?
Чем отличается малый бизнес от бизнеса большого? Природа и структура конфликта
Природа и структура конфликта Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации.
Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации. Организация деятельности
Организация деятельности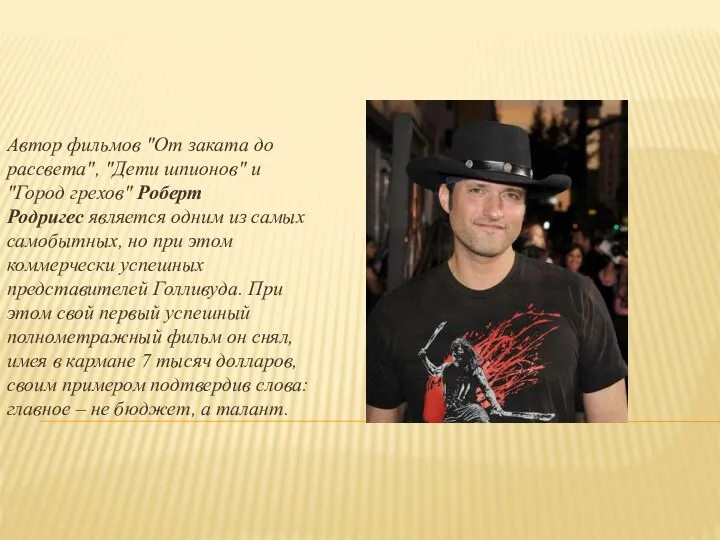 Режиссёрские приёмы в творчестве Роберта Родригеса
Режиссёрские приёмы в творчестве Роберта Родригеса фемпикник
фемпикник Процессный подход
Процессный подход  Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво»
Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво» ПЛЮСЫ И МИНУСЫсъедобных сувениров
ПЛЮСЫ И МИНУСЫсъедобных сувениров Рубежная диагностическая работа
Рубежная диагностическая работа Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi
Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi Презентация на тему Мастера печатных дел (4 класс)
Презентация на тему Мастера печатных дел (4 класс) Изготовление контактных линз
Изготовление контактных линз Кислоты 8 класс
Кислоты 8 класс Диета
Диета Тайны Японских Гейш
Тайны Японских Гейш Технология саморазвития личности
Технология саморазвития личности Презентация 13
Презентация 13 Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе
Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST
Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST