- Электрические машины

Содержание
- 2. Электрическая машина – электромагнитный преобразователь, предназначенный для преобразования электрической энергии в механическую и обратно. В основе
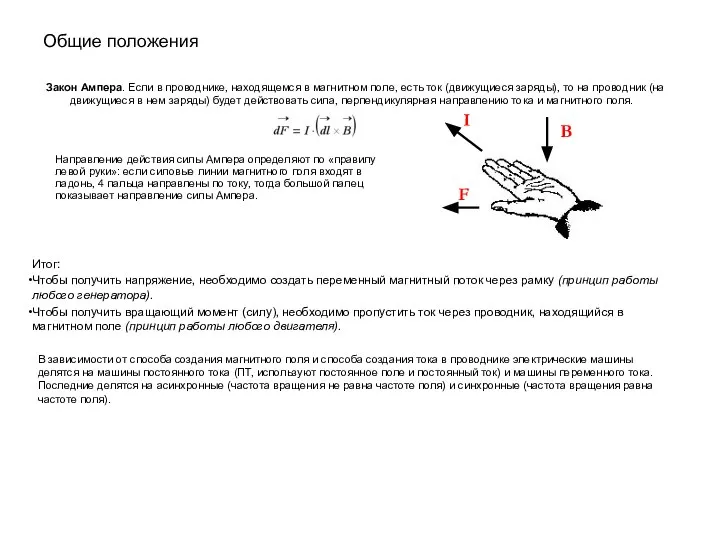
- 3. Общие положения Закон Ампера. Если в проводнике, находящемся в магнитном поле, есть ток (движущиеся заряды), то
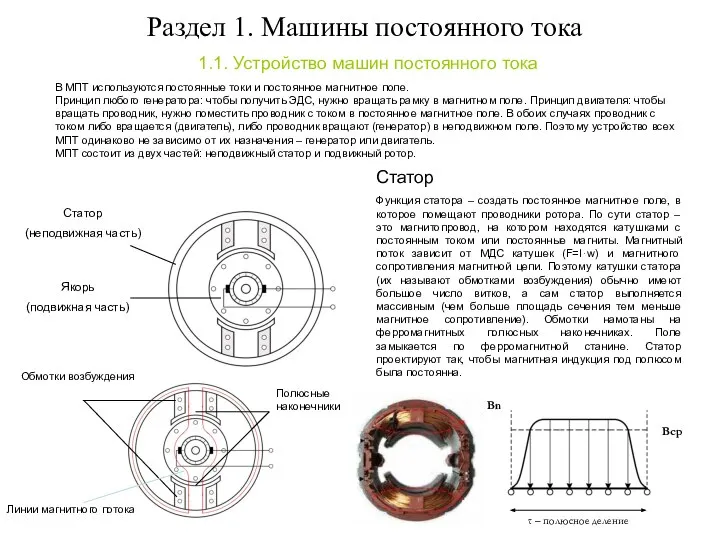
- 4. Раздел 1. Машины постоянного тока 1.1. Устройство машин постоянного тока Статор (неподвижная часть) Якорь (подвижная часть)
- 5. Якорь - вращающуюся часть МПТ (в других машинах ее называют ротор). Т.к. магнитный поток обмоток возбуждения
- 6. Сложность вторая. Как соединить начала и концы обмоток и как снять с них ЭДС (подвести к
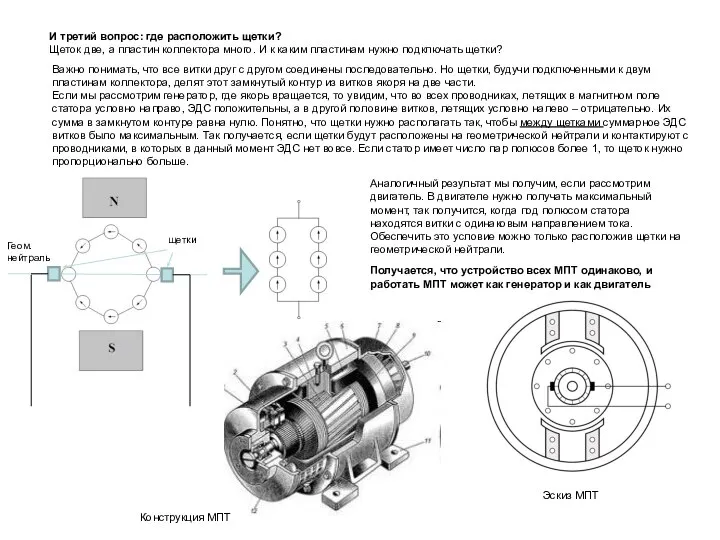
- 7. И третий вопрос: где расположить щетки? Щеток две, а пластин коллектора много. И к каким пластинам
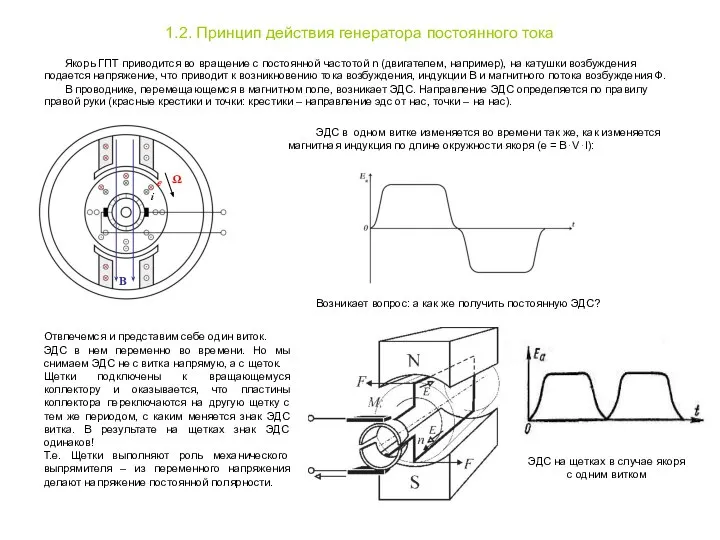
- 8. 1.2. Принцип действия генератора постоянного тока Якорь ГПТ приводится во вращение с постоянной частотой n (двигателем,
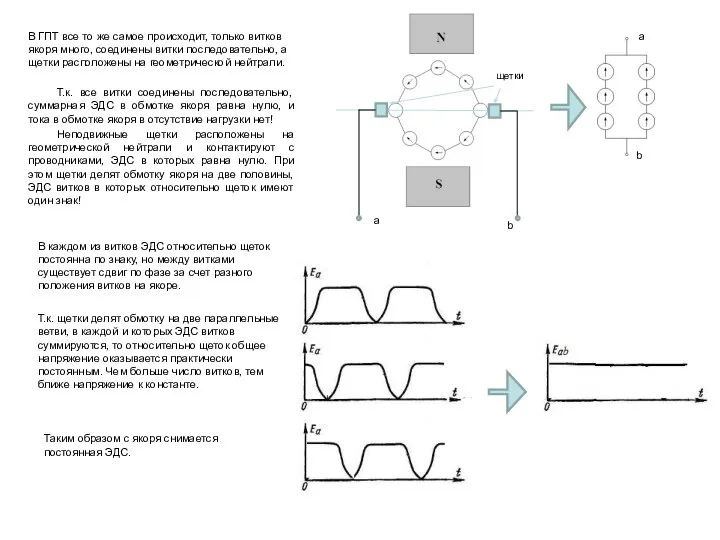
- 9. В ГПТ все то же самое происходит, только витков якоря много, соединены витки последовательно, а щетки
- 10. Если к щеткам подключить нагрузку, в витках обмотки якоря потечет ток, сонаправленный с ЭДС. На ток,
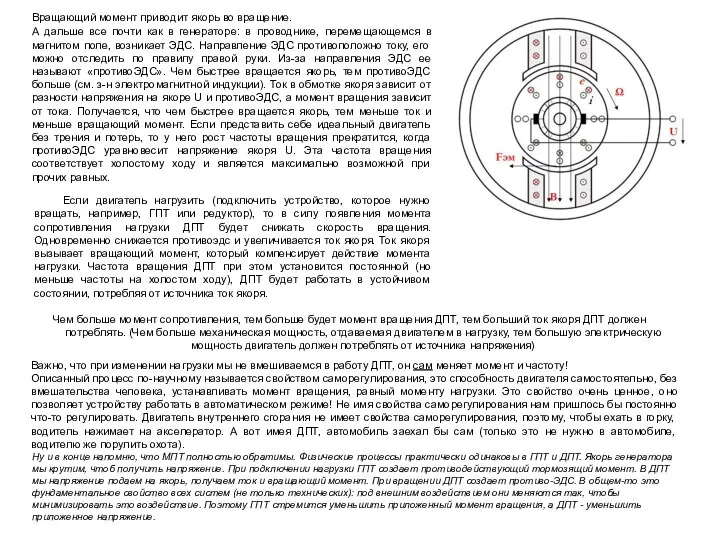
- 11. Вращающий момент приводит якорь во вращение. А дальше все почти как в генераторе: в проводнике, перемещающемся
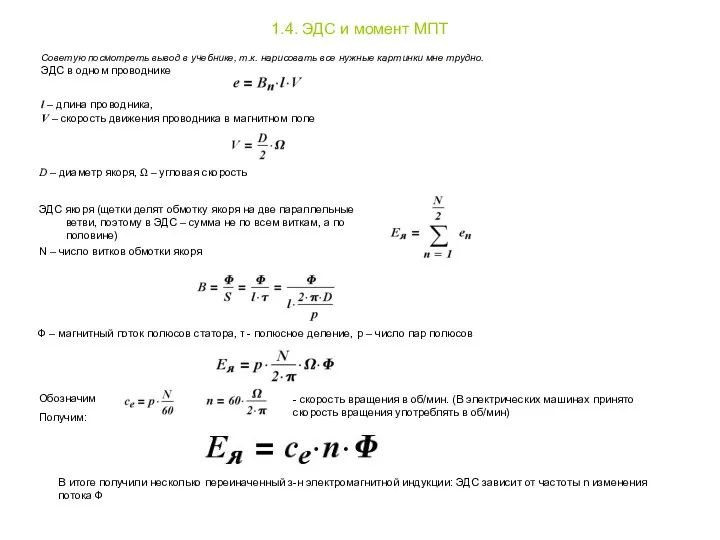
- 12. 1.4. ЭДС и момент МПТ Советую посмотреть вывод в учебнике, т.к. нарисовать все нужные картинки мне
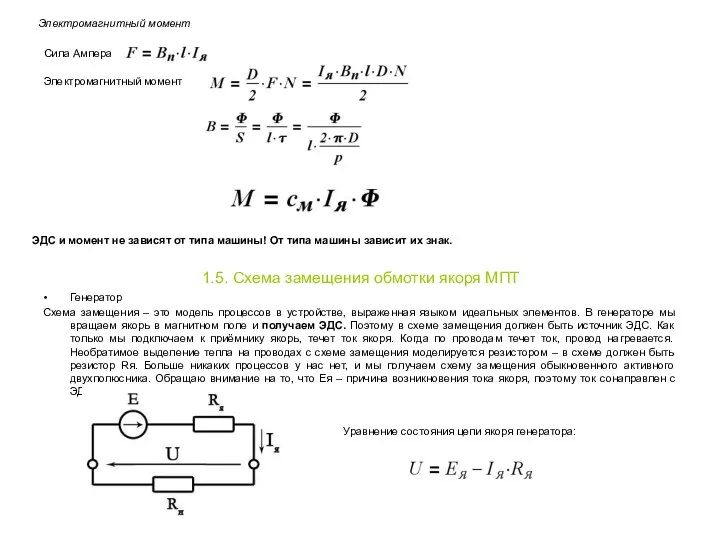
- 13. Электромагнитный момент Сила Ампера Электромагнитный момент ЭДС и момент не зависят от типа машины! От типа
- 14. 1.5. Схема замещения обмотки якоря МПТ Генератор Схема замещения – это модель процессов в устройстве, выраженная
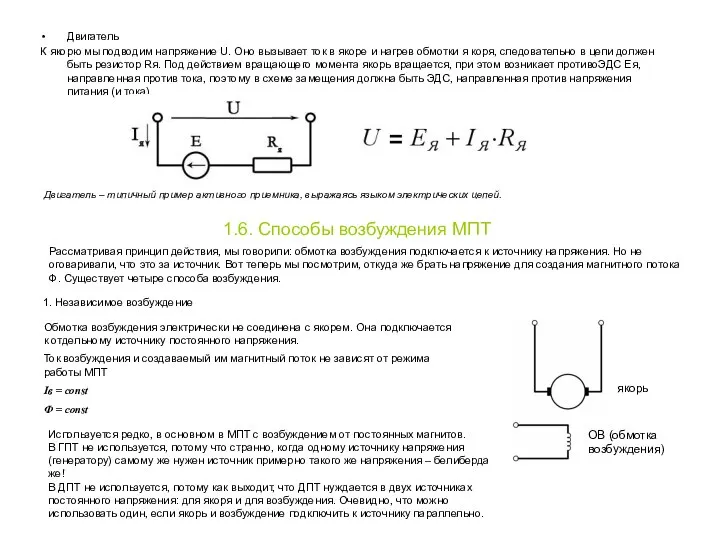
- 15. Двигатель К якорю мы подводим напряжение U. Оно вызывает ток в якоре и нагрев обмотки я
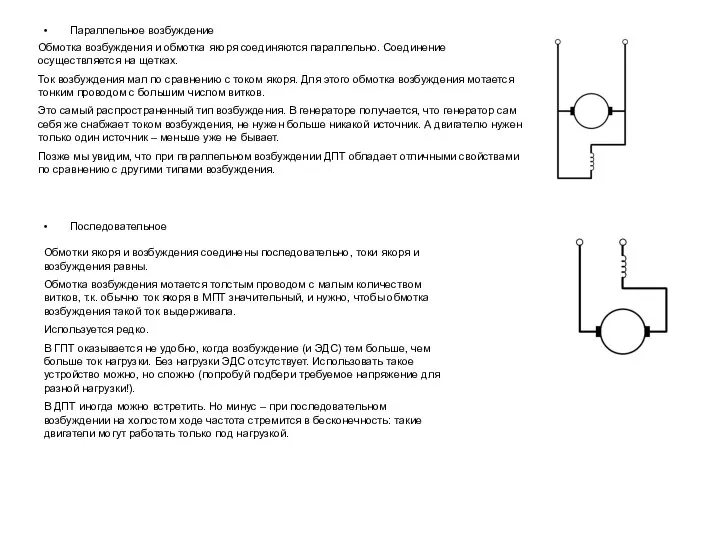
- 16. Параллельное возбуждение Обмотка возбуждения и обмотка якоря соединяются параллельно. Соединение осуществляется на щетках. Ток возбуждения мал
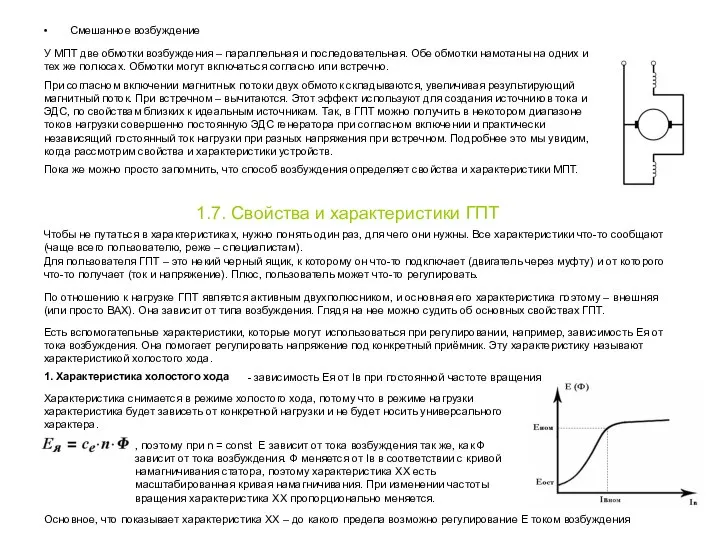
- 17. Смешанное возбуждение У МПТ две обмотки возбуждения – параллельная и последовательная. Обе обмотки намотаны на одних
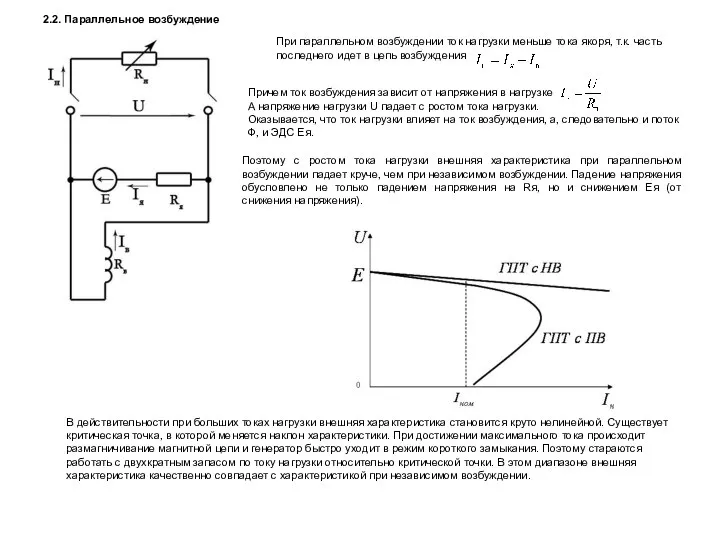
- 18. 2. Внешние характеристики ГПТ 2.1. Независимое возбуждение Внешняя характеристика – это зависимость напряжения ГПТ от тока
- 19. 2.2. Параллельное возбуждение При параллельном возбуждении ток нагрузки меньше тока якоря, т.к. часть последнего идет в
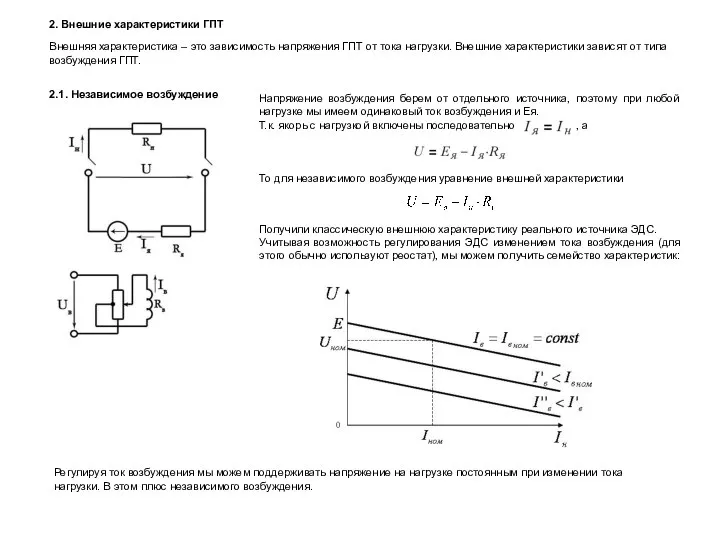
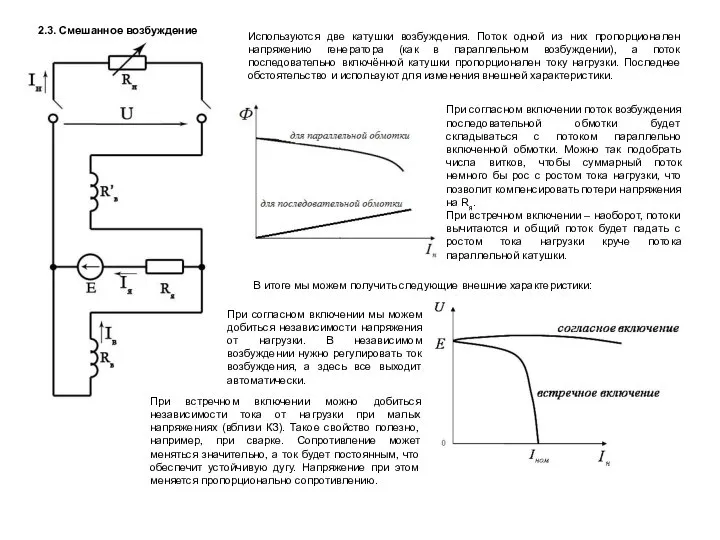
- 20. 2.3. Смешанное возбуждение Используются две катушки возбуждения. Поток одной из них пропорционален напряжению генератора (как в
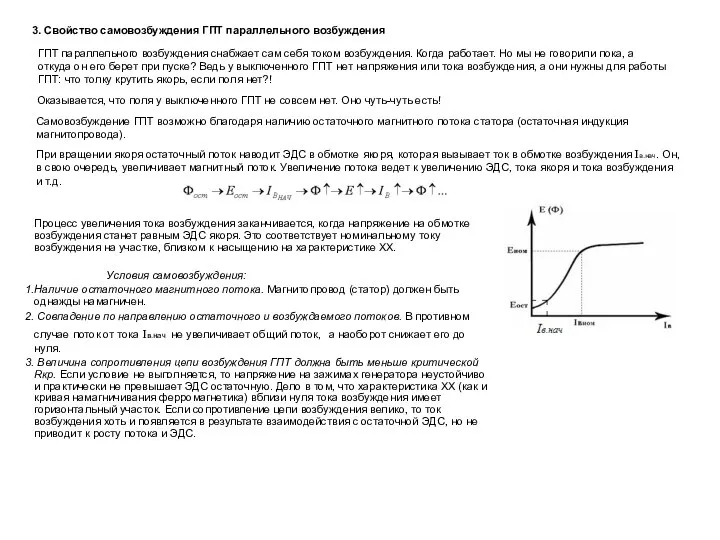
- 21. 3. Свойство самовозбуждения ГПТ параллельного возбуждения Самовозбуждение ГПТ возможно благодаря наличию остаточного магнитного потока статора (остаточная
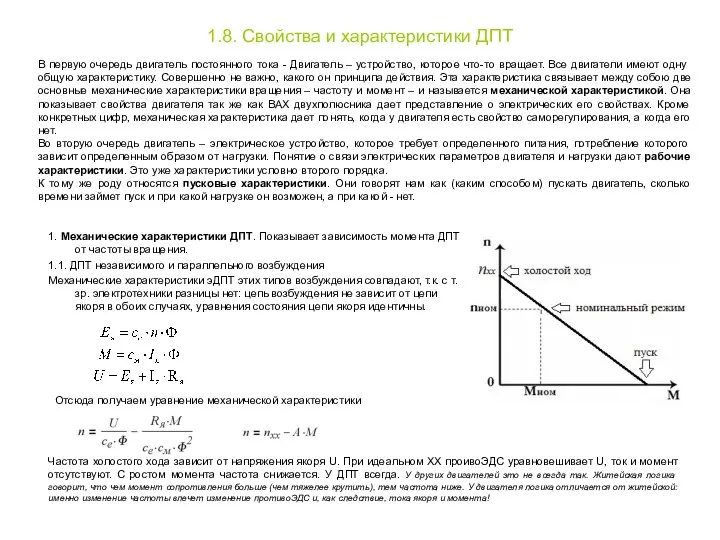
- 22. 1.8. Свойства и характеристики ДПТ В первую очередь двигатель постоянного тока - Двигатель – устройство, которое
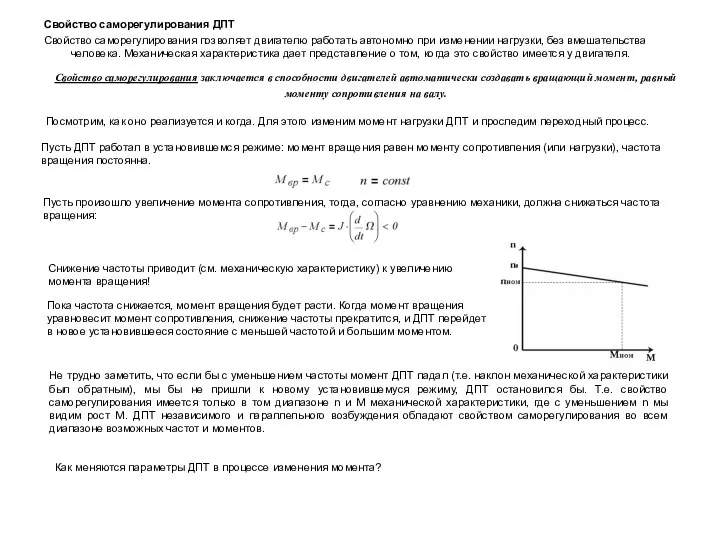
- 23. Свойство саморегулирования ДПТ Свойство саморегулирования позволяет двигателю работать автономно при изменении нагрузки, без вмешательства человека. Механическая
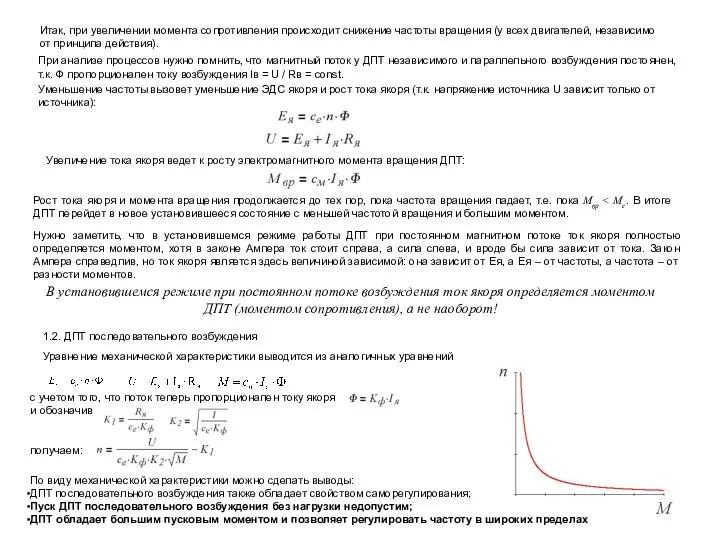
- 24. При анализе процессов нужно помнить, что магнитный поток у ДПТ независимого и параллельного возбуждения постоянен, т.к.
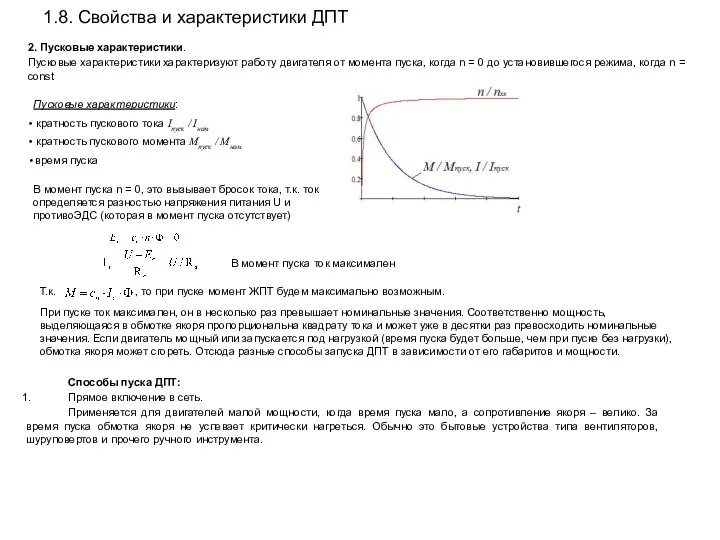
- 25. 1.8. Свойства и характеристики ДПТ Способы пуска ДПТ: Прямое включение в сеть. Применяется для двигателей малой
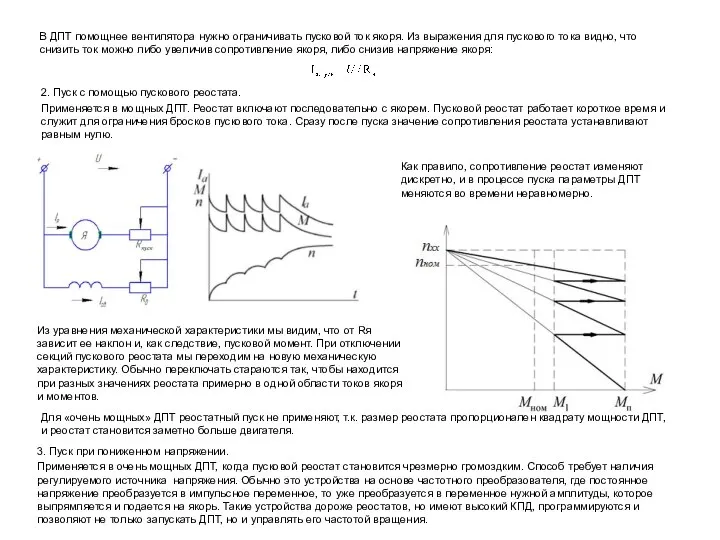
- 26. 2. Пуск с помощью пускового реостата. Применяется в мощных ДПТ. Реостат включают последовательно с якорем. Пусковой
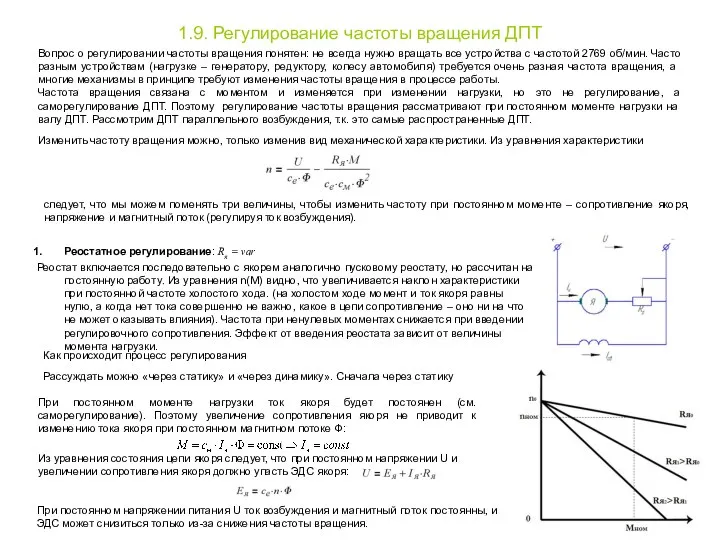
- 27. 1.9. Регулирование частоты вращения ДПТ Вопрос о регулировании частоты вращения понятен: не всегда нужно вращать все
- 28. Через «динамику»: Пусть двигатель работал про постоянной частоте вращения с моментом М1. Теперь мы увеличили сопротивление
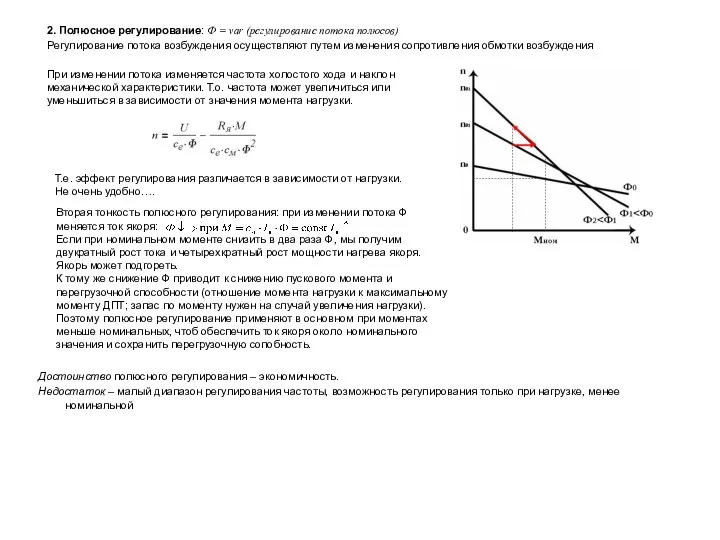
- 29. 2. Полюсное регулирование: Ф = var (регулирование потока полюсов) Регулирование потока возбуждения осуществляют путем изменения сопротивления
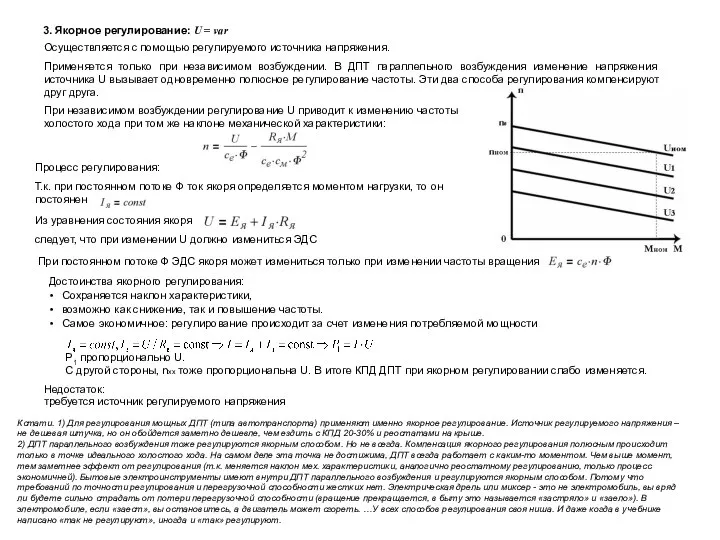
- 30. 3. Якорное регулирование: U = var Осуществляется с помощью регулируемого источника напряжения. Применяется только при независимом
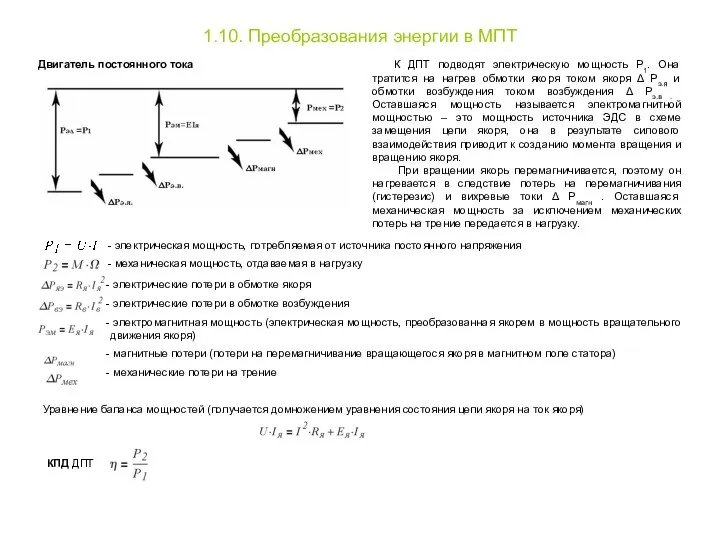
- 31. 1.10. Преобразования энергии в МПТ Двигатель постоянного тока электрическая мощность, потребляемая от источника постоянного напряжения механическая
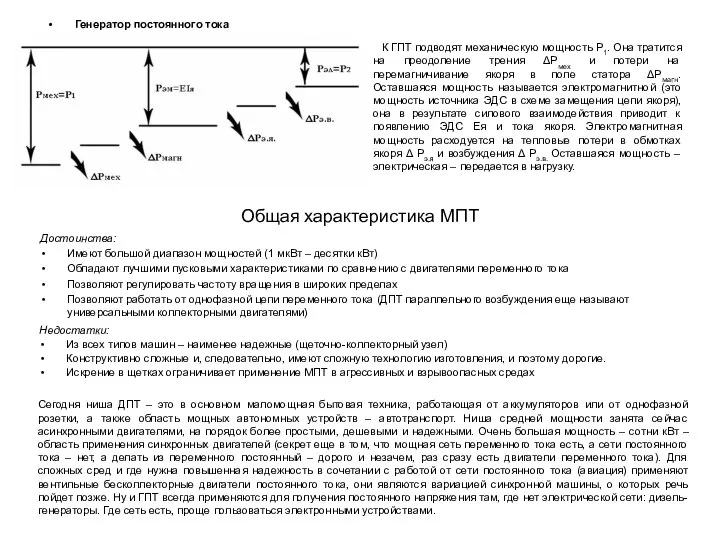
- 32. Генератор постоянного тока К ГПТ подводят механическую мощность P1. Она тратится на преодоление трения ΔPмех и
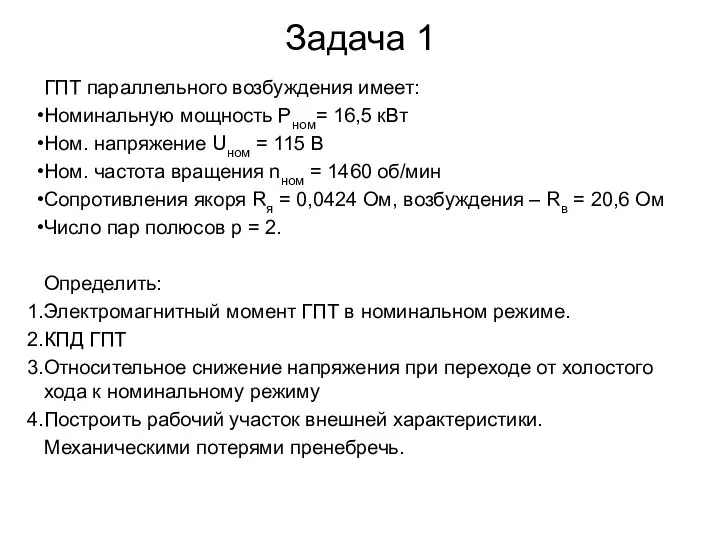
- 33. Задача 1 ГПТ параллельного возбуждения имеет: Номинальную мощность Рном= 16,5 кВт Ном. напряжение Uном = 115
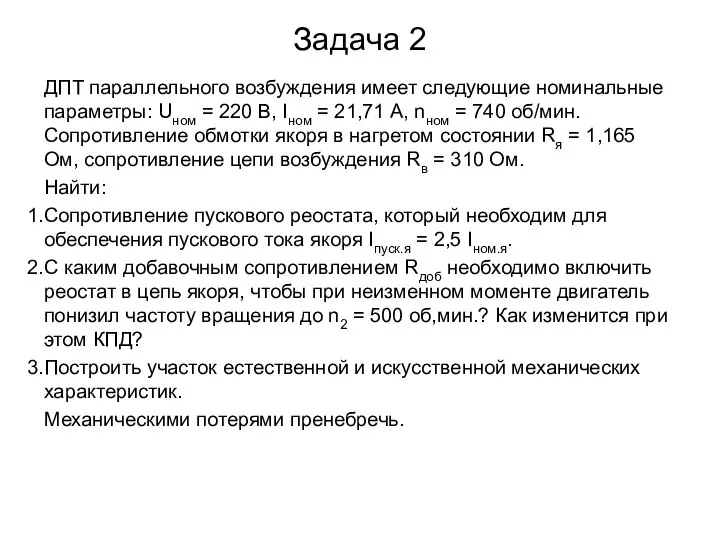
- 34. Задача 2 ДПТ параллельного возбуждения имеет следующие номинальные параметры: Uном = 220 В, Iном = 21,71
- 36. Скачать презентацию
Слайд 2Электрическая машина – электромагнитный преобразователь, предназначенный для преобразования электрической энергии в механическую
Электрическая машина – электромагнитный преобразователь, предназначенный для преобразования электрической энергии в механическую
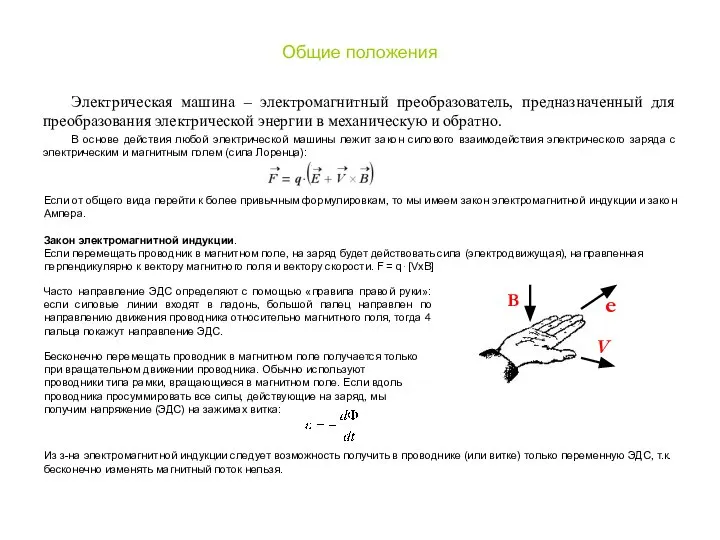
Слайд 3Общие положения
Закон Ампера. Если в проводнике, находящемся в магнитном поле, есть
Общие положения
Закон Ампера. Если в проводнике, находящемся в магнитном поле, есть
Слайд 4Раздел 1. Машины постоянного тока
1.1. Устройство машин постоянного тока
Статор
(неподвижная часть)
Якорь
(подвижная
Раздел 1. Машины постоянного тока
1.1. Устройство машин постоянного тока
Статор
(неподвижная часть)
Якорь
(подвижная
Слайд 5Якорь - вращающуюся часть МПТ (в других машинах ее называют ротор).
Т.к.
Якорь - вращающуюся часть МПТ (в других машинах ее называют ротор).
Т.к.
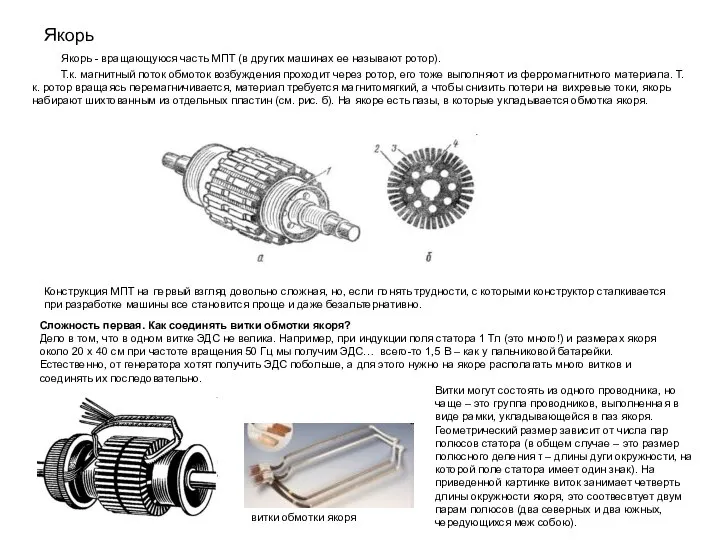
Слайд 6Сложность вторая. Как соединить начала и концы обмоток и как снять с
Сложность вторая. Как соединить начала и концы обмоток и как снять с

Слайд 7И третий вопрос: где расположить щетки?
Щеток две, а пластин коллектора много. И
И третий вопрос: где расположить щетки?
Щеток две, а пластин коллектора много. И
Слайд 81.2. Принцип действия генератора постоянного тока
Якорь ГПТ приводится во вращение с постоянной
1.2. Принцип действия генератора постоянного тока
Якорь ГПТ приводится во вращение с постоянной
Слайд 9В ГПТ все то же самое происходит, только витков якоря много, соединены
В ГПТ все то же самое происходит, только витков якоря много, соединены
Слайд 10Если к щеткам подключить нагрузку, в витках обмотки якоря потечет ток, сонаправленный
Если к щеткам подключить нагрузку, в витках обмотки якоря потечет ток, сонаправленный
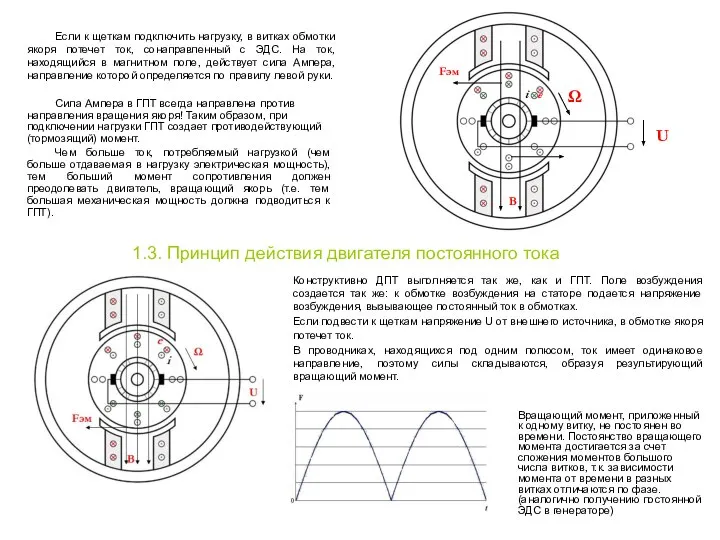
Слайд 11Вращающий момент приводит якорь во вращение.
А дальше все почти как в генераторе:
Вращающий момент приводит якорь во вращение.
А дальше все почти как в генераторе:
Слайд 121.4. ЭДС и момент МПТ
Советую посмотреть вывод в учебнике, т.к. нарисовать все
1.4. ЭДС и момент МПТ
Советую посмотреть вывод в учебнике, т.к. нарисовать все
Слайд 13Электромагнитный момент
Сила Ампера
Электромагнитный момент
ЭДС и момент не зависят от типа машины! От
Электромагнитный момент
Сила Ампера
Электромагнитный момент
ЭДС и момент не зависят от типа машины! От
Слайд 141.5. Схема замещения обмотки якоря МПТ
Генератор
Схема замещения – это модель процессов в
1.5. Схема замещения обмотки якоря МПТ
Генератор
Схема замещения – это модель процессов в

Слайд 15Двигатель
К якорю мы подводим напряжение U. Оно вызывает ток в якоре и
Двигатель
К якорю мы подводим напряжение U. Оно вызывает ток в якоре и
Слайд 16Параллельное возбуждение
Обмотка возбуждения и обмотка якоря соединяются параллельно. Соединение осуществляется на щетках.
Ток
Параллельное возбуждение
Обмотка возбуждения и обмотка якоря соединяются параллельно. Соединение осуществляется на щетках.
Ток
Слайд 17Смешанное возбуждение
У МПТ две обмотки возбуждения – параллельная и последовательная. Обе обмотки
Смешанное возбуждение
У МПТ две обмотки возбуждения – параллельная и последовательная. Обе обмотки
Слайд 182. Внешние характеристики ГПТ
2.1. Независимое возбуждение
Внешняя характеристика – это зависимость напряжения ГПТ
2. Внешние характеристики ГПТ
2.1. Независимое возбуждение
Внешняя характеристика – это зависимость напряжения ГПТ
Слайд 192.2. Параллельное возбуждение
При параллельном возбуждении ток нагрузки меньше тока якоря, т.к. часть
2.2. Параллельное возбуждение
При параллельном возбуждении ток нагрузки меньше тока якоря, т.к. часть
Слайд 202.3. Смешанное возбуждение
Используются две катушки возбуждения. Поток одной из них пропорционален напряжению
2.3. Смешанное возбуждение
Используются две катушки возбуждения. Поток одной из них пропорционален напряжению
Слайд 213. Свойство самовозбуждения ГПТ параллельного возбуждения
Самовозбуждение ГПТ возможно благодаря наличию остаточного магнитного
3. Свойство самовозбуждения ГПТ параллельного возбуждения
Самовозбуждение ГПТ возможно благодаря наличию остаточного магнитного
Слайд 221.8. Свойства и характеристики ДПТ
В первую очередь двигатель постоянного тока - Двигатель
1.8. Свойства и характеристики ДПТ
В первую очередь двигатель постоянного тока - Двигатель
Слайд 23Свойство саморегулирования ДПТ
Свойство саморегулирования позволяет двигателю работать автономно при изменении нагрузки, без
Свойство саморегулирования ДПТ
Свойство саморегулирования позволяет двигателю работать автономно при изменении нагрузки, без
Слайд 24При анализе процессов нужно помнить, что магнитный поток у ДПТ независимого и
При анализе процессов нужно помнить, что магнитный поток у ДПТ независимого и
Слайд 251.8. Свойства и характеристики ДПТ
Способы пуска ДПТ:
Прямое включение в сеть.
Применяется для двигателей
1.8. Свойства и характеристики ДПТ
Способы пуска ДПТ:
Прямое включение в сеть.
Применяется для двигателей
Слайд 262. Пуск с помощью пускового реостата.
Применяется в мощных ДПТ. Реостат включают последовательно
2. Пуск с помощью пускового реостата.
Применяется в мощных ДПТ. Реостат включают последовательно
Слайд 271.9. Регулирование частоты вращения ДПТ
Вопрос о регулировании частоты вращения понятен: не всегда
1.9. Регулирование частоты вращения ДПТ
Вопрос о регулировании частоты вращения понятен: не всегда
Слайд 28Через «динамику»:
Пусть двигатель работал про постоянной частоте вращения с моментом М1.
Теперь
Через «динамику»:
Пусть двигатель работал про постоянной частоте вращения с моментом М1.
Теперь
Слайд 292. Полюсное регулирование: Ф = var (регулирование потока полюсов)
Регулирование потока возбуждения осуществляют
2. Полюсное регулирование: Ф = var (регулирование потока полюсов)
Регулирование потока возбуждения осуществляют
Слайд 303. Якорное регулирование: U = var
Осуществляется с помощью регулируемого источника напряжения.
Применяется только
3. Якорное регулирование: U = var
Осуществляется с помощью регулируемого источника напряжения.
Применяется только
Слайд 311.10. Преобразования энергии в МПТ
Двигатель постоянного тока
электрическая мощность, потребляемая от источника
1.10. Преобразования энергии в МПТ
Двигатель постоянного тока
электрическая мощность, потребляемая от источника
Слайд 32Генератор постоянного тока
К ГПТ подводят механическую мощность P1. Она тратится на
Генератор постоянного тока
К ГПТ подводят механическую мощность P1. Она тратится на
Слайд 33Задача 1
ГПТ параллельного возбуждения имеет:
Номинальную мощность Рном= 16,5 кВт
Ном. напряжение Uном =
Задача 1
ГПТ параллельного возбуждения имеет:
Номинальную мощность Рном= 16,5 кВт
Ном. напряжение Uном =
Слайд 34Задача 2
ДПТ параллельного возбуждения имеет следующие номинальные параметры: Uном = 220 В,
Задача 2
ДПТ параллельного возбуждения имеет следующие номинальные параметры: Uном = 220 В,
 Действующее лицо и главный герой: Ричард
Действующее лицо и главный герой: Ричард Главная беда – вредная еда
Главная беда – вредная еда Презентация на тему Влияние игровой деятельности на эмоциональное развитие детей
Презентация на тему Влияние игровой деятельности на эмоциональное развитие детей  Школьная жизнь второклассника
Школьная жизнь второклассника Ярослав Владимирович Мудрый
Ярослав Владимирович Мудрый Государственно-правовые основы социальной защиты семьи
Государственно-правовые основы социальной защиты семьи Читаем о тиграх
Читаем о тиграх Химические реакции. Составление уравнений химических реакций
Химические реакции. Составление уравнений химических реакций ЗАГОЛОВОК ПРЕЗЕНТАЦИИ ЕСЛИ НАЗВАНИЕ ДЛИННОЕ ТО ПОДЗАГОЛОВОК МОЖЕТ БЫТЬ НАПИСАН В НЕСКОЛЬКО СТРОК Презентацию подготовила: Есипо
ЗАГОЛОВОК ПРЕЗЕНТАЦИИ ЕСЛИ НАЗВАНИЕ ДЛИННОЕ ТО ПОДЗАГОЛОВОК МОЖЕТ БЫТЬ НАПИСАН В НЕСКОЛЬКО СТРОК Презентацию подготовила: Есипо Духовная жизнь России в 90 год
Духовная жизнь России в 90 год "Огонь друг или враг?"
"Огонь друг или враг?" Набросок фигуры человека с натуры
Набросок фигуры человека с натуры Современный подход к управлению предприятием
Современный подход к управлению предприятием Продукция Транслак
Продукция Транслак Нина Н. Аниськина
Нина Н. Аниськина Результаты учащихся в конференциях
Результаты учащихся в конференциях Гончарова Ирина Алексеевна
Гончарова Ирина Алексеевна Аксессуары 2012 г.: одежда и снаряжение
Аксессуары 2012 г.: одежда и снаряжение L-микро
L-микро Дзюба Дмитрий Александрович. Разработка, поддержка и развитие веб версии МТС-Торги
Дзюба Дмитрий Александрович. Разработка, поддержка и развитие веб версии МТС-Торги The classification of religions
The classification of religions Устный журнал
Устный журнал Согрей своим теплом
Согрей своим теплом Правописание слов с сочетаниями жи – ши, ча – ща, чу – щу
Правописание слов с сочетаниями жи – ши, ча – ща, чу – щу О действующей пенсионной системе. Тенденции развития
О действующей пенсионной системе. Тенденции развития LEKTsIYa_2__1__2
LEKTsIYa_2__1__2 Умный дом
Умный дом Русские женщины – исследователи природы
Русские женщины – исследователи природы