- ИНСТИТУТ СИСТЕМНОГО АНАЛИЗА РАНГ.С.Осипов[email protected]

Содержание
- 2. Введение Около 20 лет исследуются так называемые гибридные динамические системы, в которых присутствуют как континуальная так
- 3. Введение Системы, которые в отличие от гибридных систем обладают более сложно устроенными состояниями чем таблица состояний
- 4. Системы, основанные на знаниях Известны: множество высказываний о значениях лингвистических или логических переменных; экспертные или эмпирические
- 5. Системы, основанные на знаниях Не известны: точные описания состояний; точное описание динамики системы.
- 6. ПРИМЕРЫ 12 мая температура воды 14 градусов 12 мая течение слабое Направление течения: северо-западное Соленость воды:
- 7. ПРИМЕРЫ Правило 1. УСЛОВИЕ температура воды высокая, солёность низкая или средняя СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ зоопланктон размножается
- 8. ПРИМЕРЫ Правило 2. УСЛОВИЕ зоопланктон размножается, течение слабое СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ рост биомассы популяции, биомасса популяции
- 9. ПРИМЕРЫ Правило 3.(ВЫБОР ЦЕЛИ) УСЛОВИЕ направление линии визирования = неизвестно СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель: = поиск
- 10. ПРИМЕРЫ Правило 4.(ВЫБОР ЦЕЛИ) УСЛОВИЕ угол (АL,V)≥α, резерв времени СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель: = зависание СПИСОК
- 11. ПРИМЕРЫ Правило 5. (ВЫЧИСЛЕНИЕ ВЕКТОРА И МОМЕНТА СИЛЫ) УСЛОВИЕ цель = сближение, дистанция = D, вектор
- 12. ПРИМЕРЫ Правило 6.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ) УСЛОВИЕ nтакта= четный, |F|≠0, угол (F,F(Cn))≤εα , |F|- |F(Cn)| СПИСОК
- 13. ПРИМЕРЫ Правило 7.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ) УСЛОВИЕ nтакта= нечетный, |M|≠0, угол (M,M(Cn))≤ε ρ , |M|- |M(Cn)|
- 14. ПРАВИЛА Правило: П = , C, A и D - множества атомарных формул языка L -
- 15. C – условие правила, A – множество формул, таких, что соответствующие им факты добавляются в состояние
- 16. ПРАВИЛА Два класса правил Rτ и Rσ. С правилом класса Rτ связывается некоторое действие, производимое исполнительным
- 17. Динамические системы, основанные на правилах Применение правил как средства описания состояний и динамики приводит к динамическим
- 18. Рабочая память Совокупность таблиц или конечных отношений (таких, как, например, в реляционных базах данных), количество которых
- 19. Рабочая память Выполнимость и применимость: а) условие правила выполнено в текущем состоянии рабочей памяти тогда и
- 20. Стратегия управления 1 Выбирает некоторое правило из множества правил, проверяет выполнимость его условия в текущем состоянии
- 21. Стратегия управления 1 Если множество правил упорядочено, например, в алфавитном порядке (по первой букве, затем по
- 22. ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ Обозначим описанный процесс через К и положим K(x, Пσ )= φ(x)
- 23. ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ Осталось ввести время: для этого в языке выделим сорт переменной t,
- 24. ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ H = - динамическая система, основанная на правилах, где Φ: 2х
- 25. ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ Состояние системы - неподвижная точка уравнения Φ(χ) = χ Предельное состояние
- 26. ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕНЫМ ПОВЕДЕНИЕМ Задано некоторое Ω ⊆ 2х с определенным на нем нетранзитивным, асимметричным
- 27. ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ Пусть ω ∈ Ω Процедура π: 2х × 2х → МНОЖЕСТВО
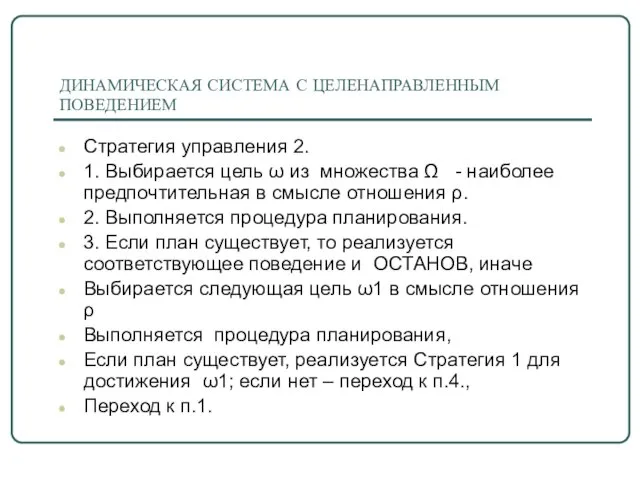
- 28. ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ Стратегия управления 2. 1. Выбирается цель ω из множества Ω -
- 29. ПРИМЕР поведение обезьяны: «СОПЕРНИК-БАНАН-СОПЕРНИК», поведение активного корабля: «СТЫКОВКА- ОБЛЕТ- СТЫКОВКА».
- 30. ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ Получены результаты: об устойчивости таких систем и их управляемости (в смысле
- 31. Классификация динамических систем, основанных на правилах. Система H1: П= , P(t, y) – добавляемый факт; Система
- 32. Классификация динамических систем, основанных на правилах. S0 – начальное состояние систем H2 и H3. Система H21:
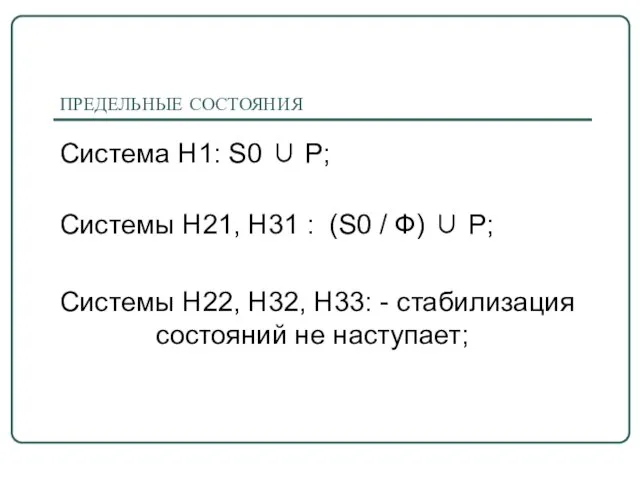
- 33. ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ Р – объединение фактов, добавляемых всеми правилами; Ф – объединение фактов, удаляемых всеми правилами;
- 34. ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ Система Н1: S0 ∪ Р; Системы Н21, Н31 : (S0 / Ф) ∪ Р;
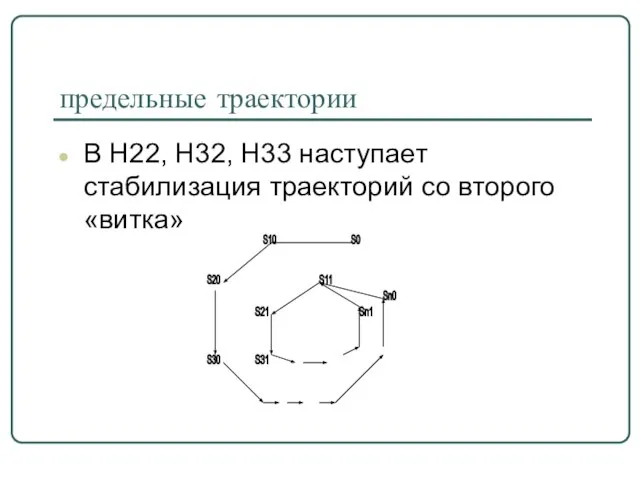
- 35. предельные траектории В Н22, Н32, Н33 наступает стабилизация траекторий со второго «витка»
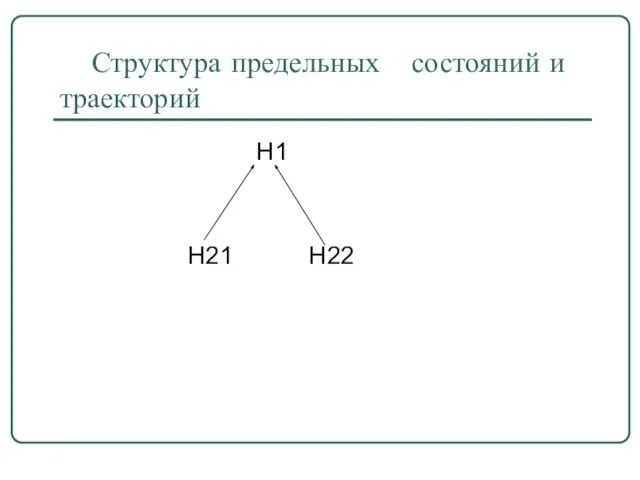
- 36. Структура предельных состояний и траекторий Н1 Н21 Н22
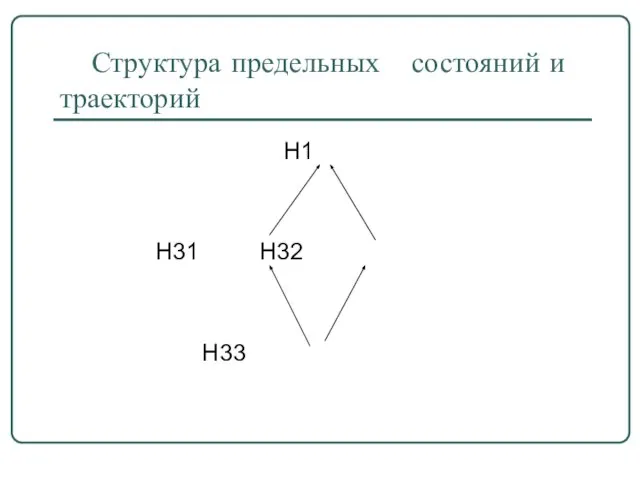
- 37. Структура предельных состояний и траекторий Н1 Н31 Н32 Н33
- 38. Учет применимости правил
- 39. СВОДКА РЕЗУЛЬТАТОВ Устойчивость и управляемость. Пусть I - некоторое возмущение в состоянии Si, т.е. i=Si{I}и имеет
- 40. СВОДКА РЕЗУЛЬТАТОВ Определение 3. Если X - множество состояний модели, то пара точек (x0,x1) в XґX
- 41. СВОДКА РЕЗУЛЬТАТОВ Существование плана и достижимость Определение 7. Планом достижения состояния ω из состояния ι будем
- 42. СВОДКА РЕЗУЛЬТАТОВ Теорема 5. Следующая процедура есть процедура планирования: 1.Пусть S есть целевое состояние, Mi текущее
- 43. Сводка результатов Теорема 6. Для всякой пары точек (x0 ,x1) ∈ XхX план П = П
- 44. ПУБЛИКАЦИИ ПО ТЕМЕ Gennady Osipov. Developing Models of a World with Regard for its Dynamics -
- 45. Публикации по теме Osipov G. Sazonova L., Intelligent system for fish stock prediction and allowable catch
- 46. ПУБЛИКАЦИИ ПО ТЕМЕ Осипов Г.С. Дискретные динамические модели, основанные на знаниях: архитектура, планирование, управляемость. Труды 4-го
- 47. Публикации по теме Бурдаев М.Н., Осипов Г.С., Хачумов В.М. О системе управления относительным движением космических аппаратов
- 48. ПУБЛИКАЦИИ ПО ТЕМЕ Г.С.Осипов. Интеллектуальные динамические системы и целенаправленное поведение. Научно - теоретический журнал «Искусственный интеллект»,
- 50. Скачать презентацию
Слайд 2Введение
Около 20 лет исследуются так называемые гибридные динамические системы, в которых присутствуют
Введение
Около 20 лет исследуются так называемые гибридные динамические системы, в которых присутствуют
Слайд 3Введение
Системы, которые в отличие от гибридных систем обладают более сложно устроенными
Введение
Системы, которые в отличие от гибридных систем обладают более сложно устроенными
Слайд 4Системы, основанные на знаниях
Известны:
множество высказываний о значениях лингвистических или логических
Системы, основанные на знаниях
Известны:
множество высказываний о значениях лингвистических или логических
Слайд 5Системы, основанные на знаниях
Не известны:
точные описания состояний;
точное описание динамики системы.
Системы, основанные на знаниях
Не известны:
точные описания состояний;
точное описание динамики системы.
Слайд 6ПРИМЕРЫ
12 мая температура воды 14 градусов
12 мая течение слабое
Направление течения: северо-западное
Соленость воды:
ПРИМЕРЫ
12 мая температура воды 14 градусов
12 мая течение слабое
Направление течения: северо-западное
Соленость воды:
Слайд 7ПРИМЕРЫ
Правило 1.
УСЛОВИЕ температура воды высокая, солёность низкая или средняя
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ зоопланктон
ПРИМЕРЫ
Правило 1.
УСЛОВИЕ температура воды высокая, солёность низкая или средняя
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ зоопланктон
Слайд 8ПРИМЕРЫ
Правило 2.
УСЛОВИЕ зоопланктон размножается, течение слабое
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ рост биомассы популяции, биомасса
ПРИМЕРЫ
Правило 2.
УСЛОВИЕ зоопланктон размножается, течение слабое
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ рост биомассы популяции, биомасса
Слайд 9ПРИМЕРЫ
Правило 3.(ВЫБОР ЦЕЛИ)
УСЛОВИЕ направление линии визирования = неизвестно
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель:
ПРИМЕРЫ
Правило 3.(ВЫБОР ЦЕЛИ)
УСЛОВИЕ направление линии визирования = неизвестно
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель:
Слайд 10ПРИМЕРЫ
Правило 4.(ВЫБОР ЦЕЛИ)
УСЛОВИЕ угол (АL,V)≥α, резерв времени <ε
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель:
ПРИМЕРЫ
Правило 4.(ВЫБОР ЦЕЛИ)
УСЛОВИЕ угол (АL,V)≥α, резерв времени <ε
СПИСОК ДОБАВЛЯЕМЫХ ФАКТОВ цель:
Слайд 11ПРИМЕРЫ
Правило 5. (ВЫЧИСЛЕНИЕ ВЕКТОРА И МОМЕНТА СИЛЫ)
УСЛОВИЕ цель = сближение, дистанция =
ПРИМЕРЫ
Правило 5. (ВЫЧИСЛЕНИЕ ВЕКТОРА И МОМЕНТА СИЛЫ)
УСЛОВИЕ цель = сближение, дистанция =
Слайд 12ПРИМЕРЫ
Правило 6.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ)
УСЛОВИЕ nтакта= четный, |F|≠0, угол (F,F(Cn))≤εα , |F|-
ПРИМЕРЫ
Правило 6.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ)
УСЛОВИЕ nтакта= четный, |F|≠0, угол (F,F(Cn))≤εα , |F|-
Слайд 13ПРИМЕРЫ
Правило 7.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ)
УСЛОВИЕ nтакта= нечетный, |M|≠0, угол (M,M(Cn))≤ε ρ ,
ПРИМЕРЫ
Правило 7.(ВЫБОР КОМБИНАЦИИ ВКЛЮЧАЕМЫХ ДВИГАТЕЛЕЙ)
УСЛОВИЕ nтакта= нечетный, |M|≠0, угол (M,M(Cn))≤ε ρ ,
Слайд 14ПРАВИЛА
Правило: П = < C, A, D >,
C, A и
ПРАВИЛА
Правило: П = < C, A, D >,
C, A и
Слайд 15 C – условие правила,
A – множество формул, таких, что соответствующие
C – условие правила,
A – множество формул, таких, что соответствующие
Слайд 16ПРАВИЛА
Два класса правил Rτ и Rσ.
С правилом класса Rτ связывается некоторое действие,
ПРАВИЛА
Два класса правил Rτ и Rσ.
С правилом класса Rτ связывается некоторое действие,
Слайд 17Динамические системы,
основанные на правилах
Применение правил как средства описания состояний и
Динамические системы,
основанные на правилах
Применение правил как средства описания состояний и
Слайд 18Рабочая память
Совокупность таблиц или конечных отношений (таких, как, например, в реляционных
Рабочая память
Совокупность таблиц или конечных отношений (таких, как, например, в реляционных
Слайд 19Рабочая память
Выполнимость и применимость:
а) условие правила выполнено в текущем состоянии рабочей
Рабочая память
Выполнимость и применимость:
а) условие правила выполнено в текущем состоянии рабочей
Слайд 20Стратегия управления 1
Выбирает некоторое правило из множества правил, проверяет выполнимость его
Стратегия управления 1
Выбирает некоторое правило из множества правил, проверяет выполнимость его
Слайд 21Стратегия управления 1
Если множество правил упорядочено, например, в алфавитном порядке (по первой
Стратегия управления 1
Если множество правил упорядочено, например, в алфавитном порядке (по первой
Слайд 22ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
Обозначим описанный процесс через К и положим
K(x,
ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
Обозначим описанный процесс через К и положим
K(x,
Слайд 23ДИНАМИЧЕСКИЕ СИСТЕМЫ,
ОСНОВАННЫЕ НА ПРАВИЛАХ
Осталось ввести время: для этого в языке выделим сорт
ДИНАМИЧЕСКИЕ СИСТЕМЫ,
ОСНОВАННЫЕ НА ПРАВИЛАХ
Осталось ввести время: для этого в языке выделим сорт
Слайд 24 ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
H = -
ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
H =
Слайд 25 ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
Состояние системы - неподвижная точка уравнения
Φ(χ)
ДИНАМИЧЕСКИЕ СИСТЕМЫ, ОСНОВАННЫЕ НА ПРАВИЛАХ
Состояние системы - неподвижная точка уравнения
Φ(χ)
Слайд 26 ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕНЫМ ПОВЕДЕНИЕМ
Задано некоторое Ω ⊆ 2х с определенным на
ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕНЫМ ПОВЕДЕНИЕМ
Задано некоторое Ω ⊆ 2х с определенным на
Слайд 27ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Пусть ω ∈ Ω
Процедура π: 2х ×
ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Пусть ω ∈ Ω
Процедура π: 2х ×
Слайд 28ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Стратегия управления 2.
1. Выбирается цель ω из
ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Стратегия управления 2.
1. Выбирается цель ω из
Слайд 29ПРИМЕР
поведение обезьяны: «СОПЕРНИК-БАНАН-СОПЕРНИК»,
поведение активного корабля: «СТЫКОВКА- ОБЛЕТ- СТЫКОВКА».
ПРИМЕР
поведение обезьяны: «СОПЕРНИК-БАНАН-СОПЕРНИК»,
поведение активного корабля: «СТЫКОВКА- ОБЛЕТ- СТЫКОВКА».
Слайд 30ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Получены результаты: об устойчивости таких систем и их
ДИНАМИЧЕСКАЯ СИСТЕМА С ЦЕЛЕНАПРАВЛЕННЫМ ПОВЕДЕНИЕМ
Получены результаты: об устойчивости таких систем и их
Слайд 31
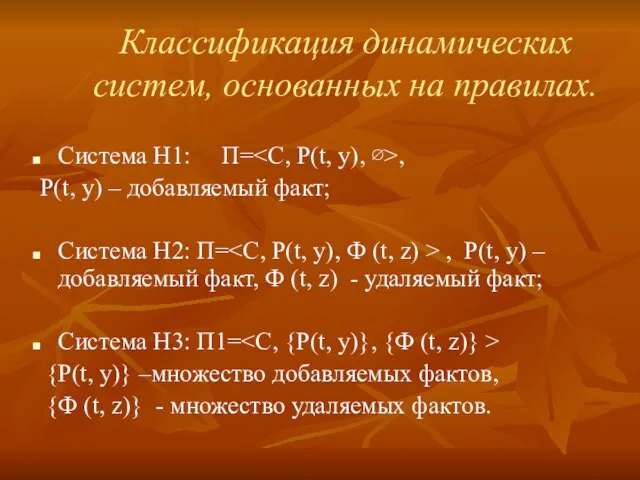
Классификация динамических систем, основанных на правилах.
Система H1: П=<С, P(t, y), ∅>,
Классификация динамических систем, основанных на правилах.
Система H1: П=<С, P(t, y), ∅>,
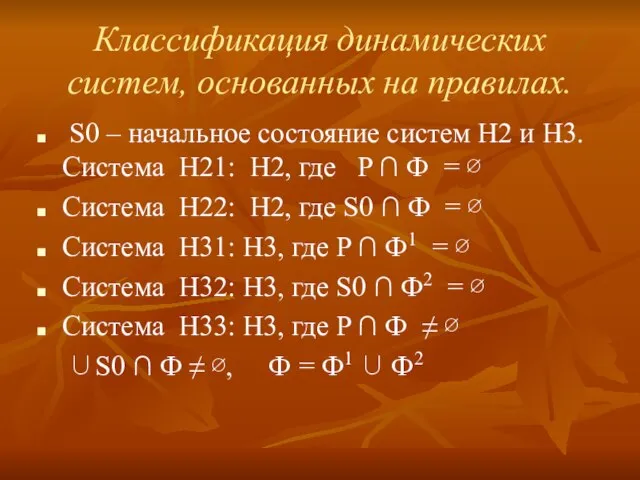
Слайд 32Классификация динамических систем, основанных на правилах.
S0 – начальное состояние систем H2
Классификация динамических систем, основанных на правилах.
S0 – начальное состояние систем H2
Слайд 33ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ
Р – объединение фактов, добавляемых всеми правилами;
Ф – объединение фактов, удаляемых
ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ
Р – объединение фактов, добавляемых всеми правилами;
Ф – объединение фактов, удаляемых
Слайд 34ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ
Система Н1: S0 ∪ Р;
Системы Н21, Н31 : (S0 / Ф)
ПРЕДЕЛЬНЫЕ СОСТОЯНИЯ
Система Н1: S0 ∪ Р;
Системы Н21, Н31 : (S0 / Ф)
Слайд 35предельные траектории
В Н22, Н32, Н33 наступает стабилизация траекторий со второго «витка»
предельные траектории
В Н22, Н32, Н33 наступает стабилизация траекторий со второго «витка»
Слайд 36 Структура предельных состояний и траекторий
Н1
Н21 Н22
Структура предельных состояний и траекторий
Н1
Н21 Н22
Слайд 37 Структура предельных состояний и траекторий
Н1
Н31 Н32
Н33
Структура предельных состояний и траекторий
Н1
Н31 Н32
Н33
Слайд 38Учет применимости правил
Учет применимости правил
Слайд 39СВОДКА РЕЗУЛЬТАТОВ
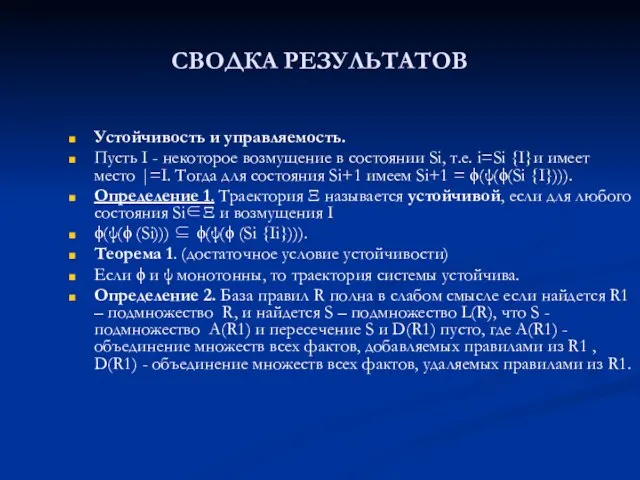
Устойчивость и управляемость.
Пусть I - некоторое возмущение в состоянии Si, т.е.
СВОДКА РЕЗУЛЬТАТОВ
Устойчивость и управляемость.
Пусть I - некоторое возмущение в состоянии Si, т.е.
Слайд 40СВОДКА РЕЗУЛЬТАТОВ
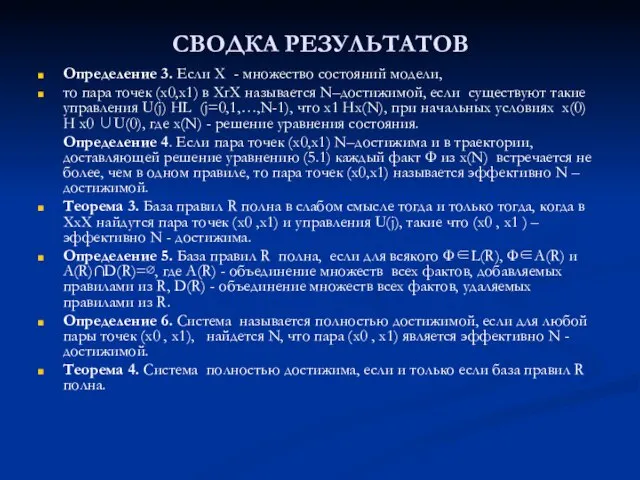
Определение 3. Если X - множество состояний модели,
то пара точек (x0,x1)
СВОДКА РЕЗУЛЬТАТОВ
Определение 3. Если X - множество состояний модели,
то пара точек (x0,x1)
Слайд 41СВОДКА РЕЗУЛЬТАТОВ
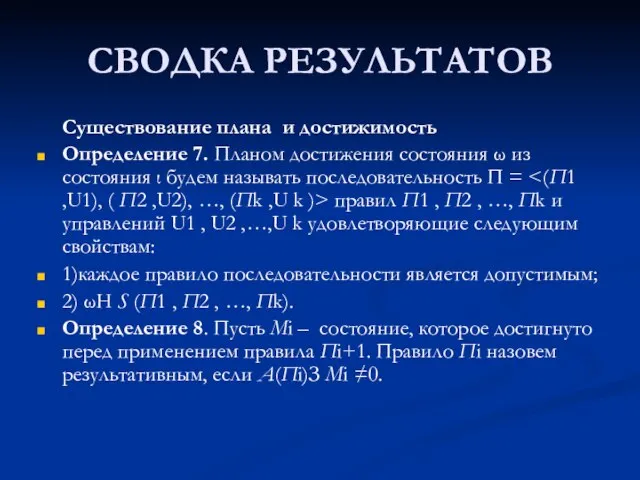
Существование плана и достижимость
Определение 7. Планом достижения состояния ω из состояния
СВОДКА РЕЗУЛЬТАТОВ
Существование плана и достижимость
Определение 7. Планом достижения состояния ω из состояния
Слайд 42СВОДКА РЕЗУЛЬТАТОВ
Теорема 5. Следующая процедура есть процедура планирования:
1.Пусть S есть целевое состояние,
СВОДКА РЕЗУЛЬТАТОВ
Теорема 5. Следующая процедура есть процедура планирования:
1.Пусть S есть целевое состояние,
Слайд 43Сводка результатов
Теорема 6. Для всякой пары точек (x0 ,x1) ∈ XхX план
Сводка результатов
Теорема 6. Для всякой пары точек (x0 ,x1) ∈ XхX план
Слайд 44ПУБЛИКАЦИИ ПО ТЕМЕ
Gennady Osipov. Developing Models of a World with Regard for
ПУБЛИКАЦИИ ПО ТЕМЕ
Gennady Osipov. Developing Models of a World with Regard for
Слайд 45Публикации по теме
Osipov G. Sazonova L., Intelligent system for fish stock prediction
Публикации по теме
Osipov G. Sazonova L., Intelligent system for fish stock prediction
Слайд 46ПУБЛИКАЦИИ ПО ТЕМЕ
Осипов Г.С. Дискретные динамические модели, основанные на знаниях: архитектура, планирование,
ПУБЛИКАЦИИ ПО ТЕМЕ
Осипов Г.С. Дискретные динамические модели, основанные на знаниях: архитектура, планирование,
Слайд 47Публикации по теме
Бурдаев М.Н., Осипов Г.С., Хачумов В.М. О системе управления относительным
Публикации по теме
Бурдаев М.Н., Осипов Г.С., Хачумов В.М. О системе управления относительным
Слайд 48ПУБЛИКАЦИИ ПО ТЕМЕ
Г.С.Осипов. Интеллектуальные динамические системы и целенаправленное поведение. Научно - теоретический
ПУБЛИКАЦИИ ПО ТЕМЕ
Г.С.Осипов. Интеллектуальные динамические системы и целенаправленное поведение. Научно - теоретический
 Презентация на тему Глобальное потепление
Презентация на тему Глобальное потепление  Шкала электромагнитных излучений
Шкала электромагнитных излучений Нашествие с Востока на Русь
Нашествие с Востока на Русь Пример построения системы управления машиностроительным производством
Пример построения системы управления машиностроительным производством Государственная поддержка агрострахования и мелиорации земель
Государственная поддержка агрострахования и мелиорации земель 2012 год. Цементный рынок: как жить в эпоху дефицита?
2012 год. Цементный рынок: как жить в эпоху дефицита? ТЕМА: Пластик- удобно, выгодно, губительно!
ТЕМА: Пластик- удобно, выгодно, губительно! Технологическое нормирование эксплуатационной работы железных дорог
Технологическое нормирование эксплуатационной работы железных дорог Швидке читання - запорука успішного навчання
Швидке читання - запорука успішного навчання Презентация на тему Франция
Презентация на тему Франция МАФ из современных материалов для детских площадок
МАФ из современных материалов для детских площадок Материалы для подготовки к контрольной работе по теме Греция
Материалы для подготовки к контрольной работе по теме Греция Вредные привычки у детей. Консультация для родителей
Вредные привычки у детей. Консультация для родителей Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии
Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1
БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1 Добыча полезных ископаемых на Луне из реголита
Добыча полезных ископаемых на Луне из реголита Социальная политика государства
Социальная политика государства 20161109_prezentatsiya_1
20161109_prezentatsiya_1 Презентация на тему Русской речи государь по прозванию Словарь
Презентация на тему Русской речи государь по прозванию Словарь Народная игрушка в развитии дошкольников
Народная игрушка в развитии дошкольников Информационный поиск в Интернете
Информационный поиск в Интернете Жисмоний шахс ер мулк соликлар
Жисмоний шахс ер мулк соликлар Жанры изобразительного искусства
Жанры изобразительного искусства Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков
Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков  Презентация на тему Школа будущего
Презентация на тему Школа будущего Рисованные объекты Действия над объектами
Рисованные объекты Действия над объектами Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени
Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени Вместе мы – сила!
Вместе мы – сила!