- Классификация электроприводов

Содержание
- 2. Классификация электроприводов Современная рабочая машина состоит из рабочего органа, передаточного механизма, двигателя и аппаратуры управления. Рабочий
- 3. Для привода машин может использоваться сила человека (ручной и ножной привод), сила ветра и воды (водяной
- 4. ЭП классифицируется по признакам: По характеру движения По числу используемых двигателей По виду электрического силового преобразователя
- 5. По характеру движения ЭП: вращательного движения; поступательного движения. Скорость может быть регулируемой или нерегулируемой. Движение –
- 6. 2. По числу используемых двигателей: групповой, характеризующийся тем, что один двигатель приводит в движение несколько исполнительных
- 7. Взаимосвязанный (многодвигательный), представляющий собой два или несколько электрически или механически связанных между собой индивидуальных электроприводов, работающих
- 8. Если двигатели связаны механически и работают на общий вал, ЭП называется многодвигательным. Если двигатели связаны электрическими
- 9. 3. По виду электрического силового преобразователя двигатели делятся на питаемые от: управляемых и неуправляемых выпрямителей, преобразующих
- 10. импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного тока.
- 11. 4. По способу соединения двигателя с рабочим органом: редукторный; безредукторный; конструктивно интегрированный.
- 12. 5. По степени регулируемости: нерегулируемый; регулируемый. 6. По основному регулируемому параметру: регулируемый по скорости; регулируемый по
- 13. 7. По виду управления: с ручным управлением; с полуавтоматическим управлением; с замкнутой системой автоматического регулирования (САР)
- 15. Скачать презентацию
Слайд 2Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма, двигателя и
Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма, двигателя и
Слайд 3Для привода машин может использоваться сила человека (ручной и ножной привод), сила
Для привода машин может использоваться сила человека (ручной и ножной привод), сила
Слайд 4ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического силового
ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического силового
Слайд 5По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
Движение
По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
Движение
Слайд 62. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит в
2. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит в
Слайд 7Взаимосвязанный (многодвигательный), представляющий собой два или несколько электрически или механически связанных между
Взаимосвязанный (многодвигательный), представляющий собой два или несколько электрически или механически связанных между
Слайд 8Если двигатели связаны механически и работают на общий вал, ЭП называется многодвигательным.
Если двигатели связаны механически и работают на общий вал, ЭП называется многодвигательным.
Слайд 93. По виду электрического силового преобразователя
двигатели делятся на питаемые от:
управляемых и
3. По виду электрического силового преобразователя
двигатели делятся на питаемые от:
управляемых и
Слайд 10импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного
импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного
Слайд 114. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
4. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
Слайд 125. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый по
5. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый по
Слайд 137. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой автоматического
7. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой автоматического
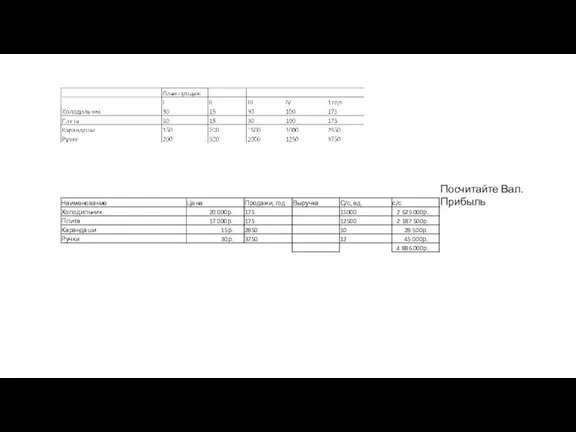 Срок окупаемости
Срок окупаемости Ветеринарна фармакологія. Препарати важких металів і арсену. Лікарські барвники
Ветеринарна фармакологія. Препарати важких металів і арсену. Лікарські барвники Романтизм в искусстве
Романтизм в искусстве Конституционное право РФ как наука и отрасль права
Конституционное право РФ как наука и отрасль права Эзопов язык
Эзопов язык Умножение и деление на однозначное число
Умножение и деление на однозначное число Фиксация и описание термических поражений материалов и конструкций
Фиксация и описание термических поражений материалов и конструкций КЛАССИФИКАЦИЯ РЕАКЦИЙ И РЕАГЕНТОВ В ОРГАНИЧЕСКОЙ ХИМИИ
КЛАССИФИКАЦИЯ РЕАКЦИЙ И РЕАГЕНТОВ В ОРГАНИЧЕСКОЙ ХИМИИ Их именами названы улицы. Шаблоны
Их именами названы улицы. Шаблоны Презентация на тему: Паровая турбина
Презентация на тему: Паровая турбина Правила варки заправочных супов
Правила варки заправочных супов Физические основы работы ЭВМ
Физические основы работы ЭВМ Координационный центр реабилитации и социальной адаптации несовершеннолетних выпускников пенитенциарных учреждений
Координационный центр реабилитации и социальной адаптации несовершеннолетних выпускников пенитенциарных учреждений Дидактика информационного и индустриального обществ
Дидактика информационного и индустриального обществ Храмы 12-13 в
Храмы 12-13 в Институт точных наук и информационных технологий. Магистерские программы
Институт точных наук и информационных технологий. Магистерские программы Презентация на тему Методика работы социального педагогам с семьей
Презентация на тему Методика работы социального педагогам с семьей Специализированное отделение оздоровительного, социально-медицинского обслуживания на дому
Специализированное отделение оздоровительного, социально-медицинского обслуживания на дому Здоровье детей в наших руках
Здоровье детей в наших руках Основы алгоритмизации
Основы алгоритмизации Арт-терапия
Арт-терапия Виды излучений
Виды излучений Виртуальные книжные выставки: особенность технологии создания
Виртуальные книжные выставки: особенность технологии создания СОНЕТ
СОНЕТ Хэлоуин
Хэлоуин Внедрения
Внедрения Строение клетки(урок 2)
Строение клетки(урок 2) Агабекян Каринэ Владимировна, учитель русского языка и литературы МБОУ «Южно-Российский лицей казачества и народов Кавказа» г
Агабекян Каринэ Владимировна, учитель русского языка и литературы МБОУ «Южно-Российский лицей казачества и народов Кавказа» г