- Компьютерная модель радиоэлектронных средств (РЭС)

Содержание
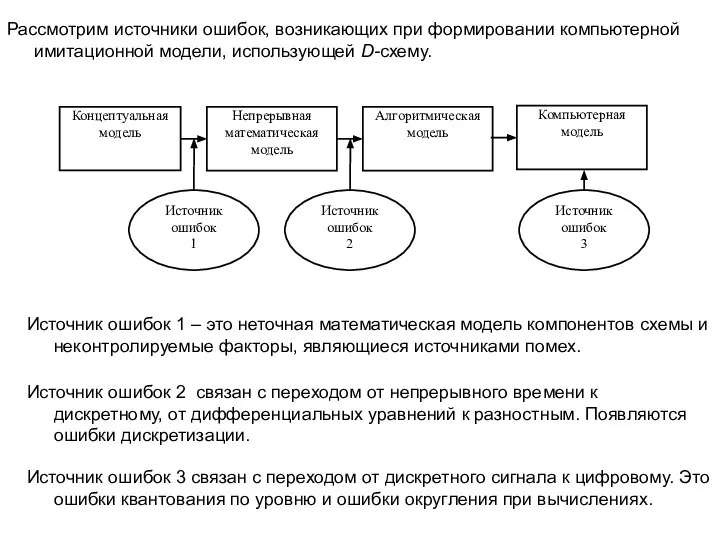
- 2. Рассмотрим источники ошибок, возникающих при формировании компьютерной имитационной модели, использующей D-схему. Источник ошибок 1 – это
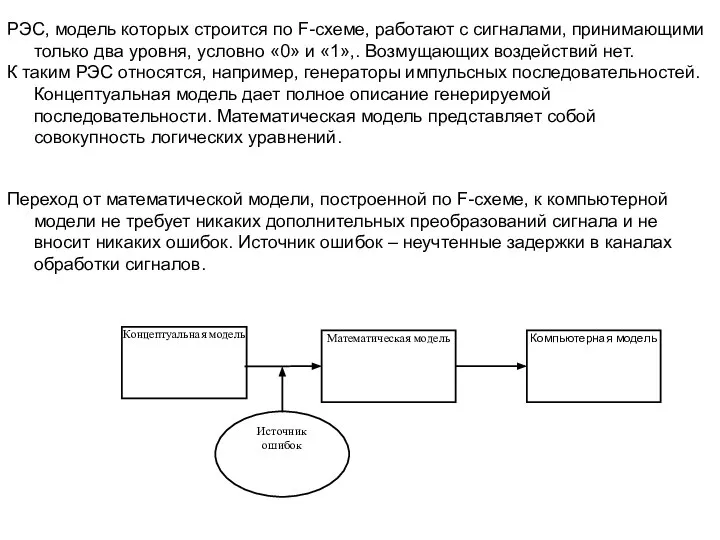
- 3. РЭС, модель которых строится по F-схеме, работают с сигналами, принимающими только два уровня, условно «0» и
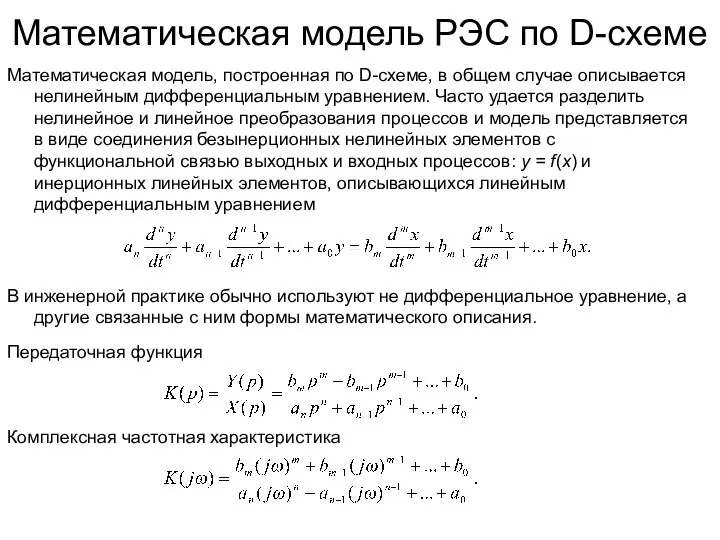
- 4. Математическая модель РЭС по D-схеме Математическая модель, построенная по D-схеме, в общем случае описывается нелинейным дифференциальным
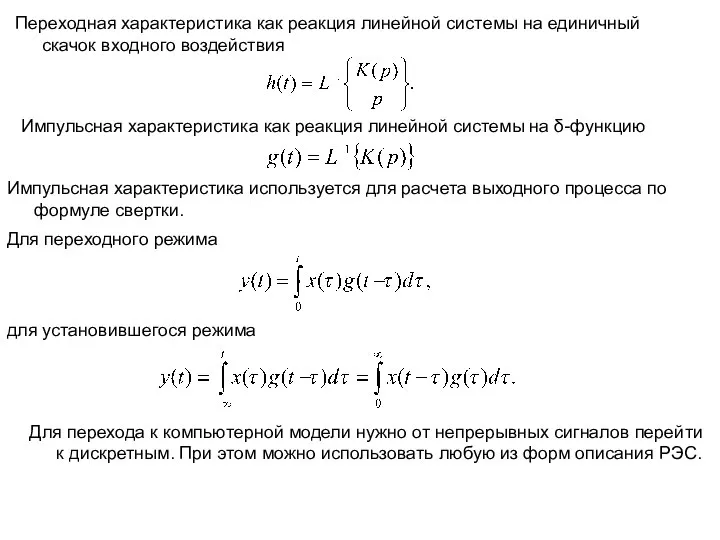
- 5. Переходная характеристика как реакция линейной системы на единичный скачок входного воздействия Импульсная характеристика как реакция линейной
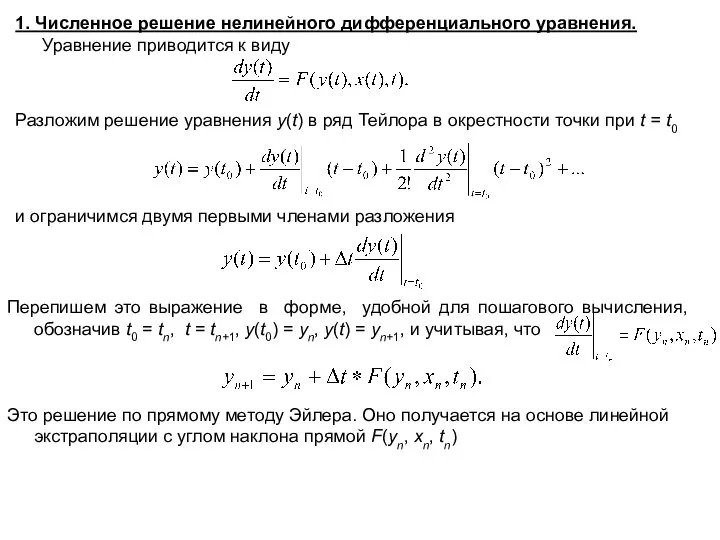
- 6. 1. Численное решение нелинейного дифференциального уравнения. Уравнение приводится к виду Разложим решение уравнения y(t) в ряд
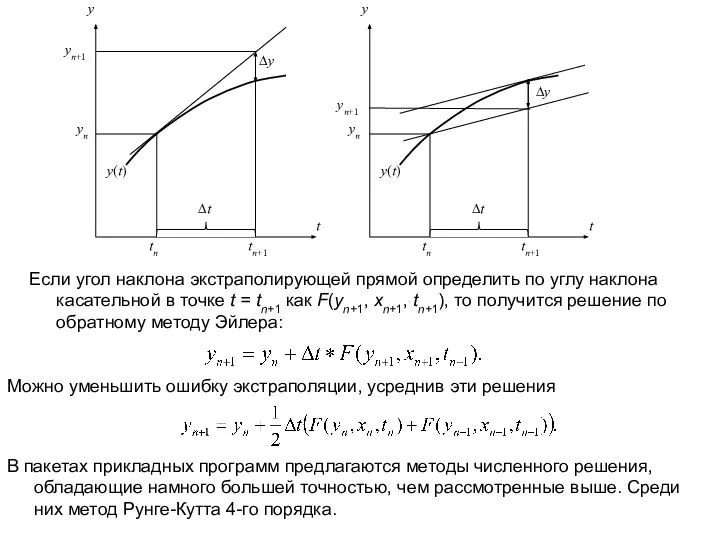
- 7. Если угол наклона экстраполирующей прямой определить по углу наклона касательной в точке t = tn+1 как
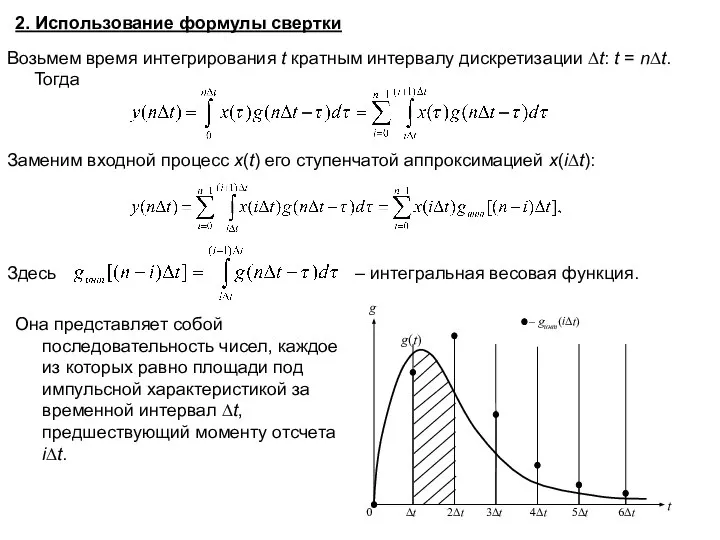
- 8. 2. Использование формулы свертки Возьмем время интегрирования t кратным интервалу дискретизации ∆t: t = n∆t. Тогда
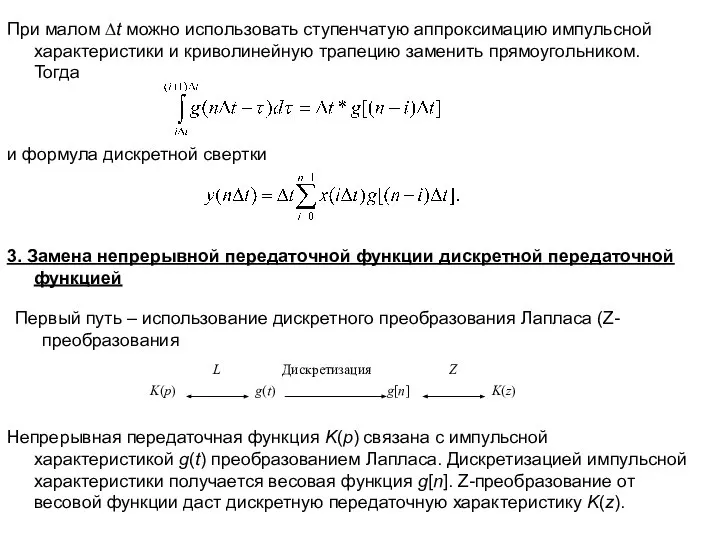
- 9. При малом ∆t можно использовать ступенчатую аппроксимацию импульсной характеристики и криволинейную трапецию заменить прямоугольником. Тогда и
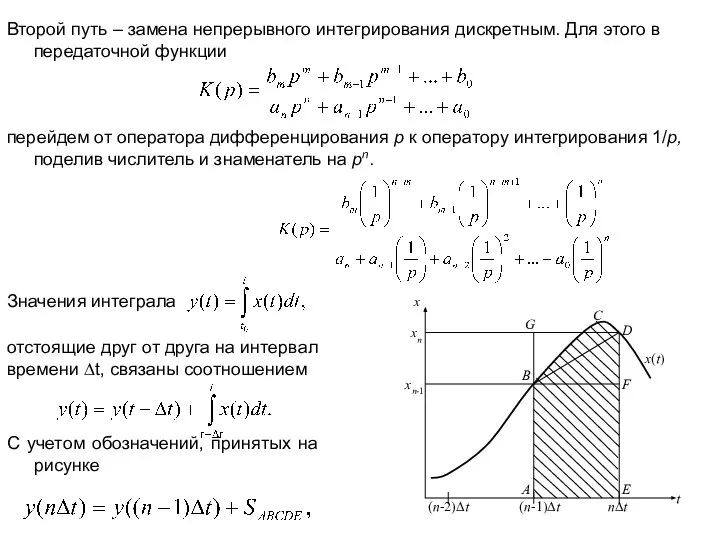
- 10. Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции перейдем от оператора дифференцирования
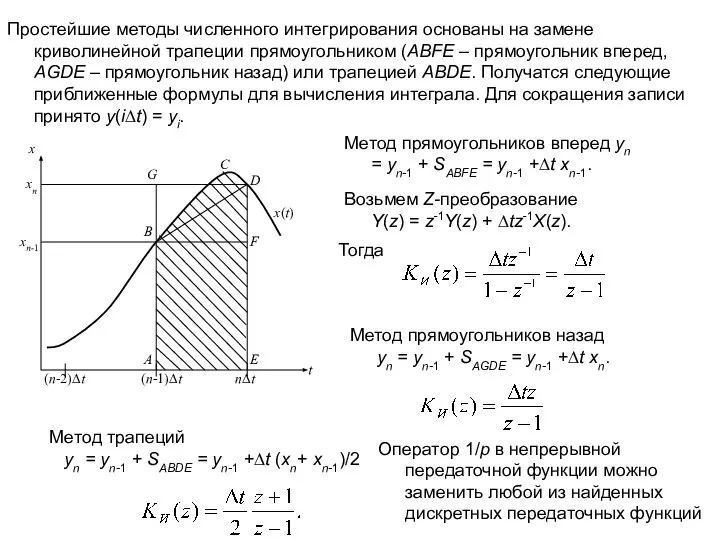
- 11. Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE – прямоугольник вперед, AGDE –
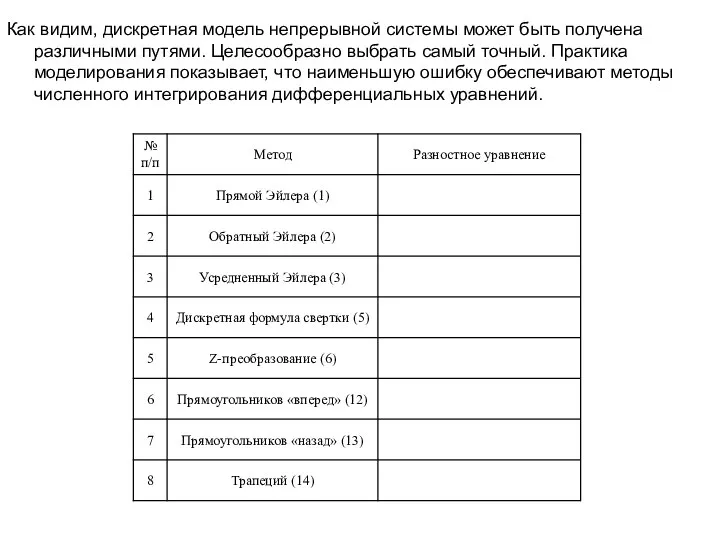
- 12. Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно выбрать самый точный. Практика
- 14. Скачать презентацию
Слайд 2Рассмотрим источники ошибок, возникающих при формировании компьютерной имитационной модели, использующей D-схему.
Источник ошибок
Рассмотрим источники ошибок, возникающих при формировании компьютерной имитационной модели, использующей D-схему.
Источник ошибок
Слайд 3РЭС, модель которых строится по F-схеме, работают с сигналами, принимающими только два
РЭС, модель которых строится по F-схеме, работают с сигналами, принимающими только два
Слайд 4Математическая модель РЭС по D-схеме
Математическая модель, построенная по D-схеме, в общем
Математическая модель РЭС по D-схеме
Математическая модель, построенная по D-схеме, в общем
Слайд 5Переходная характеристика как реакция линейной системы на единичный скачок входного воздействия
Импульсная характеристика
Переходная характеристика как реакция линейной системы на единичный скачок входного воздействия
Импульсная характеристика
Слайд 61. Численное решение нелинейного дифференциального уравнения. Уравнение приводится к виду
Разложим решение уравнения
1. Численное решение нелинейного дифференциального уравнения. Уравнение приводится к виду
Разложим решение уравнения
Слайд 7Если угол наклона экстраполирующей прямой определить по углу наклона касательной в точке
Если угол наклона экстраполирующей прямой определить по углу наклона касательной в точке
Слайд 82. Использование формулы свертки
Возьмем время интегрирования t кратным интервалу дискретизации ∆t: t
2. Использование формулы свертки
Возьмем время интегрирования t кратным интервалу дискретизации ∆t: t
Слайд 9При малом ∆t можно использовать ступенчатую аппроксимацию импульсной характеристики и криволинейную трапецию
При малом ∆t можно использовать ступенчатую аппроксимацию импульсной характеристики и криволинейную трапецию
Слайд 10Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции
перейдем
Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции
перейдем
Слайд 11Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE –
Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE –
Слайд 12Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно
Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно
 ИНФОРМАТИКА Историческое введение в специальность Альбом иллюстраций Глава 3. Программное обеспечение ЭВМ
ИНФОРМАТИКА Историческое введение в специальность Альбом иллюстраций Глава 3. Программное обеспечение ЭВМ Моя будущая профессия (2 класс)
Моя будущая профессия (2 класс) Пейзаж ван гога
Пейзаж ван гога Н/НН
Н/НН Презентация на тему "ГБОУ СОШ №2063 5Б класс 2011-2012 уч.г." - скачать презентации по Педагогике
Презентация на тему "ГБОУ СОШ №2063 5Б класс 2011-2012 уч.г." - скачать презентации по Педагогике History of medicine
History of medicine В добрый путь первоклассник
В добрый путь первоклассник Презентация на тему Томас Джефферсон
Презентация на тему Томас Джефферсон  Презентация на тему МОДЕЛИРОВАНИЕ И ФОРМАЛИЗАЦИЯ
Презентация на тему МОДЕЛИРОВАНИЕ И ФОРМАЛИЗАЦИЯ  Формирование имиджа образовательного учреждения
Формирование имиджа образовательного учреждения Мировая экономика
Мировая экономика Оновлені дизайни масла Селянське
Оновлені дизайни масла Селянське Выполнение шрифтовых работ
Выполнение шрифтовых работ Презентация на тему Les entreprises françaises en Russie
Презентация на тему Les entreprises françaises en Russie  Об изменении местонахождения дополнительного офиса Нижегородского регионального
Об изменении местонахождения дополнительного офиса Нижегородского регионального Поздравление с Международным женским днем
Поздравление с Международным женским днем Irregular patterns: quantities to 3 early number sense
Irregular patterns: quantities to 3 early number sense Особенности психолого-педагогического сопровождения детей с ОВЗ
Особенности психолого-педагогического сопровождения детей с ОВЗ И.А. Бунин «Матери» 2 класс
И.А. Бунин «Матери» 2 класс Жанр невольничьего повествования в литературе и на экране
Жанр невольничьего повествования в литературе и на экране Солдат Великой армии
Солдат Великой армии Описание пищевой (легкой) промышленности России
Описание пищевой (легкой) промышленности России ОС и вендоры 3й кв.2010 кол-во (тыс.шт) Доля рынка %3й кв.2009 кол-во (тыс.шт) Доля рынка % Symbian29480,136,618314,844,6 Android2050025,51424,53,5 iOS13484,416,77040,417,1. - презе
ОС и вендоры 3й кв.2010 кол-во (тыс.шт) Доля рынка %3й кв.2009 кол-во (тыс.шт) Доля рынка % Symbian29480,136,618314,844,6 Android2050025,51424,53,5 iOS13484,416,77040,417,1. - презе Биологические модели
Биологические модели Мониторинг состояния здоровья школьников как системообразующий фактор его сохранения и укрепления
Мониторинг состояния здоровья школьников как системообразующий фактор его сохранения и укрепления Биология Наумов
Биология Наумов О душевной и духовной сторонах человеческой личности
О душевной и духовной сторонах человеческой личности Презентация на тему Как помочь ребёнку в написании сочинения
Презентация на тему Как помочь ребёнку в написании сочинения