- Наше дело – автоматизация

Содержание
- 2. Информация для покупателей: «Получение прибыли от Преобразователей частоты(ПЧ)» «Что такое ПЧ?» Информация для технических специалистов: Насосы
- 3. Что такое ПЧ? Введение Преобразователь частоты Основные возможности Частотно-регулируемые приводы Напряжение и фазность питания Мощность Управление
- 4. Применение преобразователей частоты Применение преобразователей частоты позволяет не только управлять технологическим оборудованием, тем самым сделав технологический
- 5. Получение прибыли от ПЧ Использование асинхронных двигателей без преобразователей частоты является экономически не эффективным. В этом
- 6. Получение прибыли от ПЧ Экономия энергоресурсов до 50% Увеличение срока службы оборудования до 30 % Снижение
- 7. Получение прибыли от ПЧ С помощью дополнительных опций можно расширить область применения ПЧ. Что, несомненно, ведет
- 8. Энергетические потери и вид регулирования Попробуем разобраться, за счет чего и когда появляется возможность экономии потребляемой
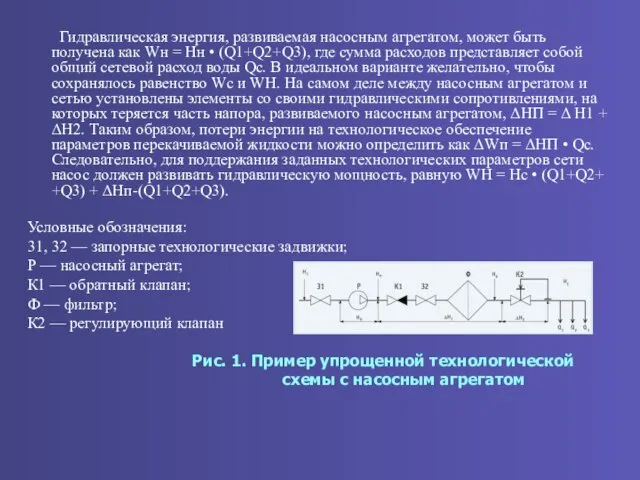
- 9. Гидравлическая энергия, развиваемая насосным агрегатом, может быть получена как Wн = Нн • (Q1+Q2+Q3), где сумма
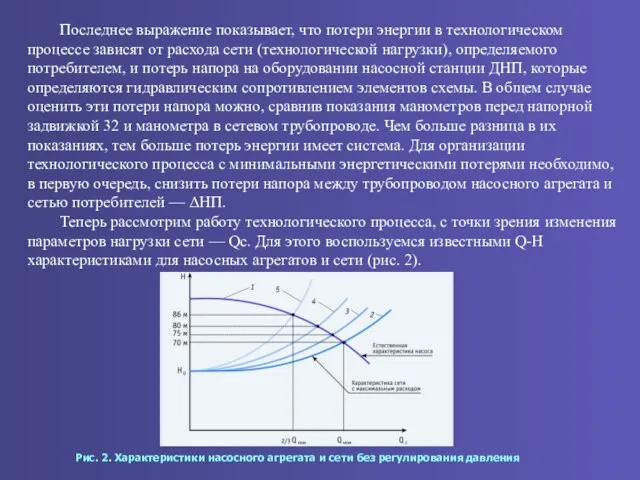
- 10. Последнее выражение показывает, что потери энергии в технологическом процессе зависят от расхода сети (технологической нагрузки), определяемого
- 11. Кривая 1 соответствует напорной характеристике насосного агрегата, а кривая 2 — гидравлической характеристике сети, где Н0
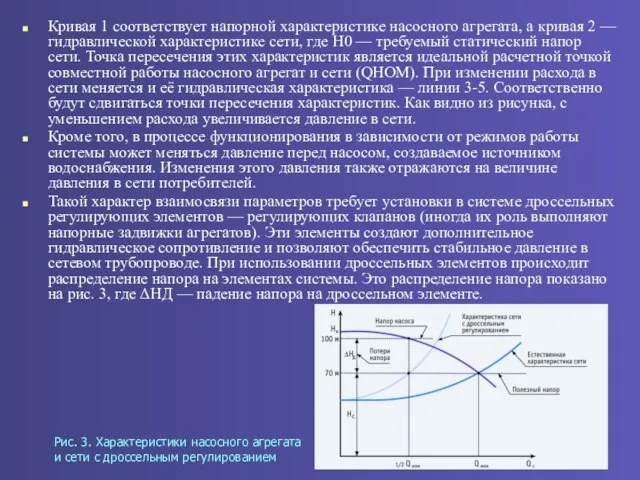
- 12. Для поддержания заданного давления в сетевом трубопроводе при изменении расхода жидкости приходится изменять гидравлическое сопротивление регулирующего
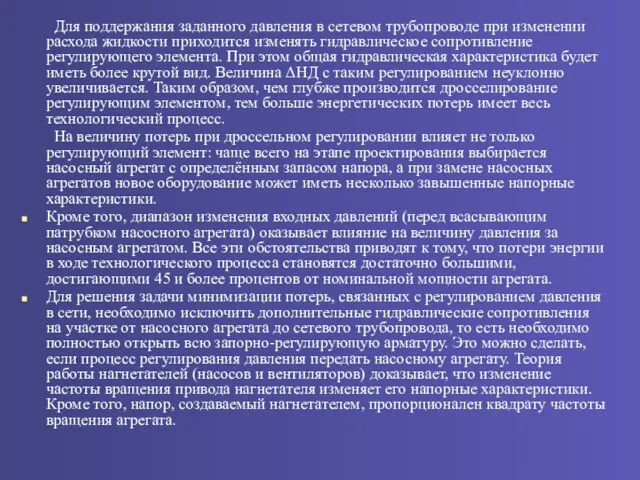
- 13. Изменение напорных характеристик насосного агрегата при изменении частоты вращения иллюстрирует рис. 4, на котором кривая 1
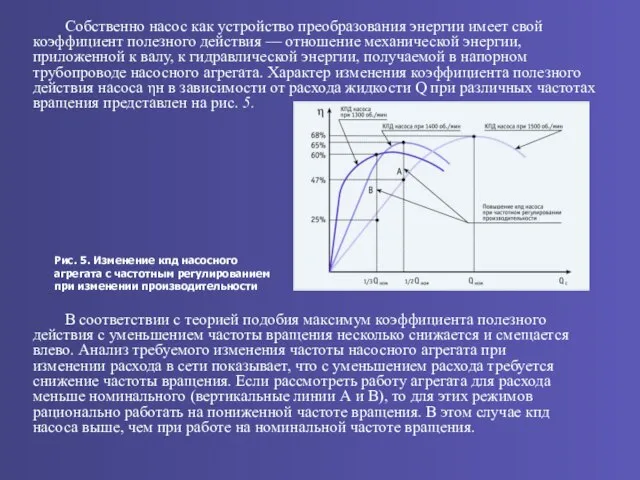
- 14. Рис. 5. Изменение кпд насосного агрегата с частотным регулированием при изменении производительности Собственно насос как устройство
- 15. Таким образом, снижение частоты вращения в соответствии с технологической нагрузкой позволяет не только экономить потребляемую энергию
- 16. ВВЕДЕНИЕ Асинхронные электродвигатели имеют значительное преимущество перед электродвигателями постоянного тока за счет простоты конструкции и удобства
- 17. Преобразователь частоты Появление в последние годы на рынке электротехнической продукции преобразователей частоты, представляющих собой статические преобразовательные
- 18. Основные возможности Преобразователь частоты обеспечивает плавный пуск и остановку двигателя, а также позволяет менять направление вращения
- 19. Частотно-регулируемые приводы Регулируемый асинхронный электропривод, или частотно-регулируемый привод, состоит из асинхронного электродвигателя и инвертора (преобразователя частоты),
- 20. Напряжение и фазность питания Преобразователи частоты подключаются к трехфазной сети 380 В переменного тока. Также производятся
- 21. Управление по вольт-частотной характеристике Управление по вольт-частотной характеристике реализует зависимость V/F=const, именуемую также V/F-характеристикой и, реже,
- 22. Если необходимо обеспечить наилучшую динамику системы, например, быстрый реверс за минимально возможное время, хорошим выбором является
- 23. ПИД-регулятор Преобразователи частоты (инверторы) обычно имеют встроенный ПИД-регулятор (пропорциональная-интегральная-дифферинциальная составляющая). Преобразователь изменяет скорость вращения двигателя таким
- 24. Торможение постоянным током Для осуществления более быстрого торможения в одну из фаз двигателя подается постоянный ток.
- 25. Выходная частота Значение выходной частоты определяет, в каком диапазоне может изменяться выходная частота напряжения преобразователя частоты.
- 26. Предотвращение резонанса В случаях возникновения резонанса в механической системе преобразователь частоты обходит резонансную частоту. Предотвращение опрокидывания
- 27. Работа в режиме подхвата работающего двигателя В случаях пуска преобразователя частоты (инвертора) при вращающейся нагрузке для
- 28. Функции защиты Преобразователи частоты обеспечивают защиту самого преобразователя частоты и электродвигателя. Набор функций защиты определяется моделью
- 29. Область применения Можно сразу выделить типовые механизмы, отличающиеся высокой эксплуатационной и экономической эффективностью при внедрении преобразователей
- 30. Экономический эффект Экономический эффект от внедрения асинхронного электропривода складывается, в частности, из следующих факторов: – экономия
- 31. Экономическая эффективность внедрения преобразователей частоты Экономический эффект от внедрения использования их в электроприводах, вентиляторов, компрессоров. Соотношение
- 32. Корпорация “СКИФ” Корпорация “СКИФ” поставляет преобразователи частоты по ценам изготовителей, что обеспечивается заключением соответствующих договоров о
- 34. Скачать презентацию
Слайд 2Информация для покупателей:
«Получение прибыли от Преобразователей частоты(ПЧ)»
«Что такое ПЧ?»
Информация для технических
Информация для покупателей:
«Получение прибыли от Преобразователей частоты(ПЧ)»
«Что такое ПЧ?»
Информация для технических
Слайд 3Что такое ПЧ?
Введение
Преобразователь частоты
Основные возможности
Частотно-регулируемые приводы
Напряжение и фазность питания
Мощность
Управление
Что такое ПЧ?
Введение
Преобразователь частоты
Основные возможности
Частотно-регулируемые приводы
Напряжение и фазность питания
Мощность
Управление
Слайд 4Применение преобразователей частоты
Применение преобразователей частоты позволяет не только управлять технологическим оборудованием, тем
Применение преобразователей частоты
Применение преобразователей частоты позволяет не только управлять технологическим оборудованием, тем
Слайд 5Получение прибыли от ПЧ
Использование асинхронных двигателей без преобразователей частоты является экономически
Получение прибыли от ПЧ
Использование асинхронных двигателей без преобразователей частоты является экономически
Слайд 6Получение прибыли от ПЧ
Экономия энергоресурсов до 50%
Увеличение срока службы оборудования до 30
Получение прибыли от ПЧ
Экономия энергоресурсов до 50%
Увеличение срока службы оборудования до 30
Слайд 7Получение прибыли от ПЧ
С помощью дополнительных опций можно расширить область применения
Получение прибыли от ПЧ
С помощью дополнительных опций можно расширить область применения
Слайд 8
Энергетические потери и вид регулирования
Попробуем разобраться, за счет чего и
Энергетические потери и вид регулирования
Попробуем разобраться, за счет чего и
Слайд 9 Гидравлическая энергия, развиваемая насосным агрегатом, может быть получена как Wн = Нн
Гидравлическая энергия, развиваемая насосным агрегатом, может быть получена как Wн = Нн
Слайд 10 Последнее выражение показывает, что потери энергии в технологическом процессе зависят от расхода
Последнее выражение показывает, что потери энергии в технологическом процессе зависят от расхода
Слайд 11Кривая 1 соответствует напорной характеристике насосного агрегата, а кривая 2 — гидравлической
Кривая 1 соответствует напорной характеристике насосного агрегата, а кривая 2 — гидравлической
Слайд 12 Для поддержания заданного давления в сетевом трубопроводе при изменении расхода жидкости приходится
Для поддержания заданного давления в сетевом трубопроводе при изменении расхода жидкости приходится
Слайд 13 Изменение напорных характеристик насосного агрегата при изменении частоты вращения иллюстрирует рис. 4,
Слайд 14Рис. 5. Изменение кпд насосного агрегата с частотным регулированием при изменении производительности
Собственно
Рис. 5. Изменение кпд насосного агрегата с частотным регулированием при изменении производительности
Собственно
Слайд 15 Таким образом, снижение частоты вращения в соответствии с технологической нагрузкой позволяет не
Слайд 16ВВЕДЕНИЕ
Асинхронные электродвигатели имеют значительное преимущество перед электродвигателями постоянного тока за счет простоты
ВВЕДЕНИЕ
Асинхронные электродвигатели имеют значительное преимущество перед электродвигателями постоянного тока за счет простоты
Слайд 17Преобразователь частоты
Появление в последние годы на рынке электротехнической продукции преобразователей частоты,
Преобразователь частоты
Появление в последние годы на рынке электротехнической продукции преобразователей частоты,
Слайд 18Основные возможности
Преобразователь частоты обеспечивает плавный пуск и остановку двигателя, а также
Основные возможности
Преобразователь частоты обеспечивает плавный пуск и остановку двигателя, а также
Слайд 19Частотно-регулируемые приводы
Регулируемый асинхронный электропривод, или частотно-регулируемый привод, состоит из асинхронного электродвигателя
Частотно-регулируемые приводы
Регулируемый асинхронный электропривод, или частотно-регулируемый привод, состоит из асинхронного электродвигателя
Слайд 20Напряжение и фазность питания
Преобразователи частоты подключаются к трехфазной сети 380
Напряжение и фазность питания
Преобразователи частоты подключаются к трехфазной сети 380
Слайд 21Управление по вольт-частотной характеристике
Управление по вольт-частотной характеристике реализует зависимость V/F=const,
Управление по вольт-частотной характеристике
Управление по вольт-частотной характеристике реализует зависимость V/F=const,
Слайд 22 Если необходимо обеспечить наилучшую динамику системы, например, быстрый реверс за минимально
Если необходимо обеспечить наилучшую динамику системы, например, быстрый реверс за минимально
Слайд 23ПИД-регулятор
Преобразователи частоты (инверторы) обычно имеют встроенный ПИД-регулятор (пропорциональная-интегральная-дифферинциальная составляющая). Преобразователь
ПИД-регулятор
Преобразователи частоты (инверторы) обычно имеют встроенный ПИД-регулятор (пропорциональная-интегральная-дифферинциальная составляющая). Преобразователь
Слайд 24Торможение постоянным током
Для осуществления более быстрого торможения в одну из
Торможение постоянным током
Для осуществления более быстрого торможения в одну из
Слайд 25Выходная частота
Значение выходной частоты определяет, в каком диапазоне может изменяться выходная
Выходная частота
Значение выходной частоты определяет, в каком диапазоне может изменяться выходная
Слайд 26Предотвращение резонанса
В случаях возникновения резонанса в механической системе преобразователь частоты обходит
Предотвращение резонанса
В случаях возникновения резонанса в механической системе преобразователь частоты обходит
Слайд 27Работа в режиме подхвата работающего двигателя
В случаях пуска преобразователя частоты
Работа в режиме подхвата работающего двигателя
В случаях пуска преобразователя частоты
Слайд 28Функции защиты
Преобразователи частоты обеспечивают защиту самого преобразователя частоты и электродвигателя. Набор
Функции защиты
Преобразователи частоты обеспечивают защиту самого преобразователя частоты и электродвигателя. Набор
Слайд 29Область применения
Можно сразу выделить типовые механизмы, отличающиеся высокой эксплуатационной и
Область применения
Можно сразу выделить типовые механизмы, отличающиеся высокой эксплуатационной и
Слайд 30Экономический эффект
Экономический эффект от внедрения асинхронного электропривода складывается, в частности,
Экономический эффект
Экономический эффект от внедрения асинхронного электропривода складывается, в частности,
Слайд 31Экономическая эффективность внедрения преобразователей частоты
Экономический эффект от внедрения использования их в
Экономическая эффективность внедрения преобразователей частоты
Экономический эффект от внедрения использования их в
Слайд 32Корпорация “СКИФ”
Корпорация “СКИФ” поставляет преобразователи частоты по ценам изготовителей, что обеспечивается
Корпорация “СКИФ”
Корпорация “СКИФ” поставляет преобразователи частоты по ценам изготовителей, что обеспечивается
 London
London Основы менеджмента
Основы менеджмента Кто покупает? Портрет вашего клиента
Кто покупает? Портрет вашего клиента Презентация на тему Непрерывные случайные величины
Презентация на тему Непрерывные случайные величины  Урок-путешествие
Урок-путешествие Экспортная Интернет площадка www.exim.uz
Экспортная Интернет площадка www.exim.uz Неправительственные правозащитные организации
Неправительственные правозащитные организации Презентация на тему Строение и функции белков
Презентация на тему Строение и функции белков  Инвестиционные программы Gold Fort
Инвестиционные программы Gold Fort Артюхова Нина Михайловна — русская детская писательница
Артюхова Нина Михайловна — русская детская писательница Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке
Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке Продажа земельных участков. Республика Крым
Продажа земельных участков. Республика Крым Презентация на тему Ромео и Джульетта
Презентация на тему Ромео и Джульетта Филогенетический и онтогенетический методы развития психики живых существ
Филогенетический и онтогенетический методы развития психики живых существ Место проведения экспедиции
Место проведения экспедиции project-presentation-template
project-presentation-template Медиаобразованиев России www.edu.of.ru/mediaeducation
Медиаобразованиев России www.edu.of.ru/mediaeducation Тема: Правописание частиц НЕ и НИ.
Тема: Правописание частиц НЕ и НИ. Чек-лист для InGame (детали)
Чек-лист для InGame (детали) Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977
Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977  Исследование как основа и как инструмент продвижения регионов
Исследование как основа и как инструмент продвижения регионов Мир на рубеже веков
Мир на рубеже веков Решение задач (Практическое пособие)
Решение задач (Практическое пособие) Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В.
Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В. Элемент архитектуры портал
Элемент архитектуры портал Переніс слві
Переніс слві Задание по дисциплине Маркетинговые стратегии
Задание по дисциплине Маркетинговые стратегии Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов
Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов