- Нейро-автоматное управление

Содержание
- 2. Содержание Автоматное программирование Нейросети и их использование М-автоматы Расширенное состояние Применение
- 3. Искусственный интеллект Нисходящий подход: Экспертные системы Базы знаний Business Intelligence Восходящий подход: Нейронные сети Генетические алгоритмы
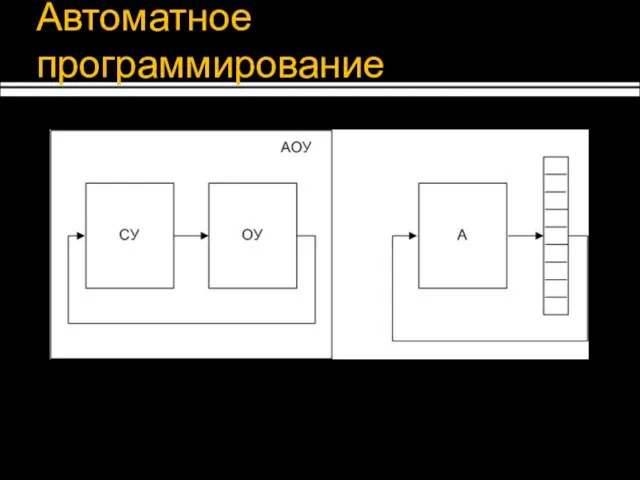
- 4. Автоматное программирование Парадигма предложена Шалыто А.А. 1991г.
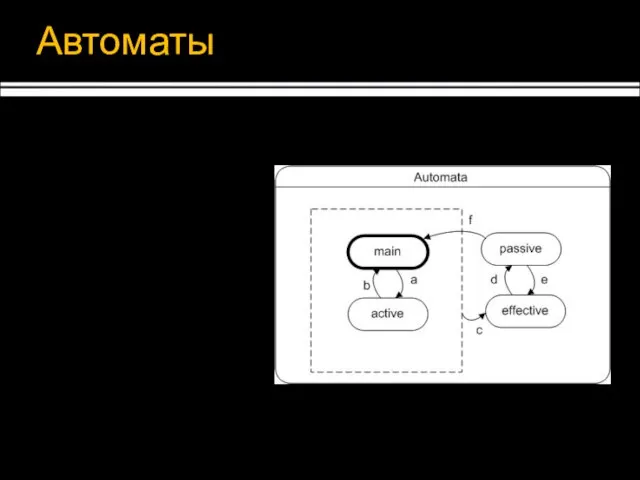
- 5. Автоматы Из чего состоит: Состояния Группы Переходы Использование: Вложение Наследование
- 6. Автоматы Достоинства: Верификация Программа по модели, не наоборот Документирование Применение: Протоколы Компиляторы Микроконтроллеры Оборудование и агрегаты
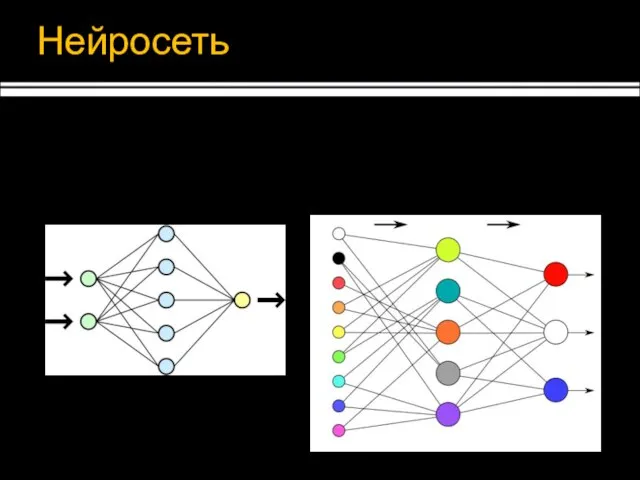
- 7. Нейросеть Принцип организации и функционирования биологических нейронных сетей Норберт Винер 1943г.
- 8. Нейросеть Этапы использования: Сбор данных для обучения Выбор топологии сети Экспериментальный подбор характеристик сети и параметров
- 9. Нейросеть Недостатки: Ограниченность применения Сложность с обучением Применение: Предсказание финансовых временных рядов Кластеризация данных Аппроксимация Сигнализация
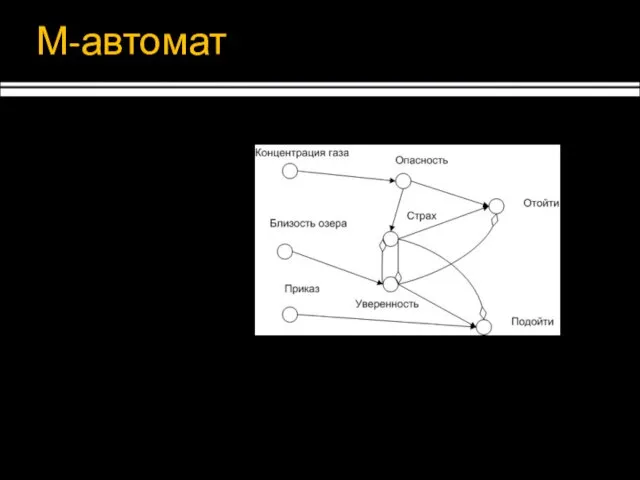
- 10. М-автомат Принятие решения: Можно выделить несколько стадий Есть условия и критерии Можно выделить «путь размышления» Автоматы
- 11. М-автомат Из чего состоит: Узлы Воздействия Отношения Отдельный блок решения с неочевидной реализацией
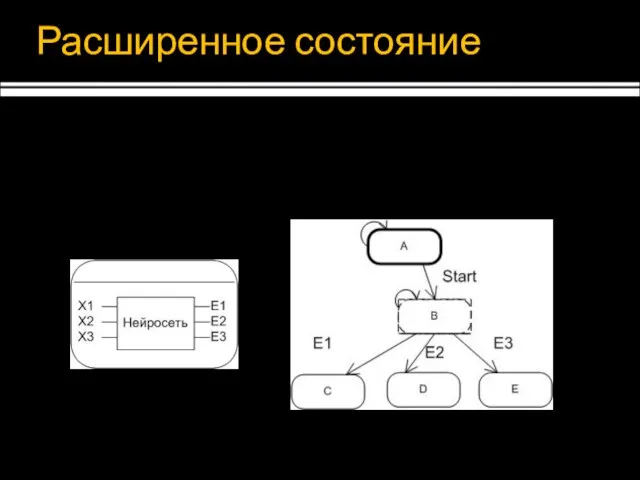
- 12. Расширенное состояние Состояние с нейросетью Взаимодействие с нейросетью на входе в состояние
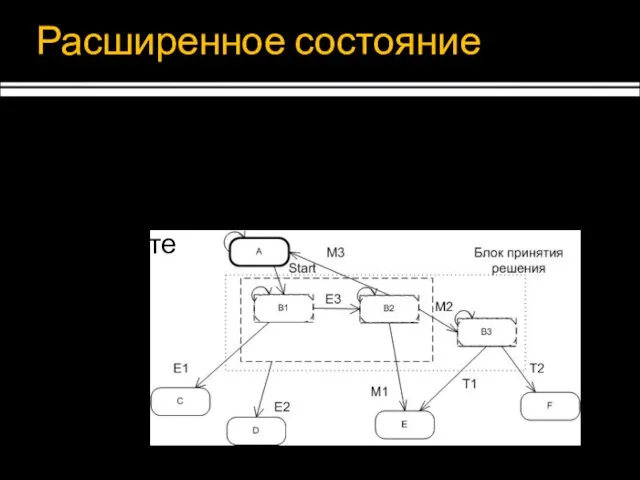
- 13. Расширенное состояние Строим путь принятия решения Состояние само создает воздействие Выделяем блок принятия решения в автомате
- 14. Расширенное состояние Параметры: Тип нейросети Количество входов, выходов Список воздействий Обучение: На этапе создания В процессе
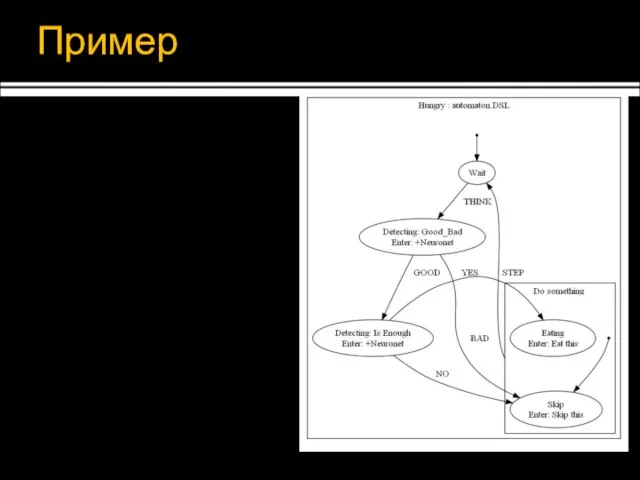
- 15. Пример Условия: Кто: ежик – ходит вперед, ест грибы Грибы – разный вес (10, 20, 40,
- 16. Пример Обученный: Не отравился Результат : 110 Не обученный: Два раза отравился Результат: 30
- 17. Направление развитие Применение : Датчики и сигнализация Комплексный анализ Развитие: Эксперименты Сталкивание с генетическими алгоритмами
- 18. Ссылки Автоматное программирование: http://is.ifmo.ru UniMod http://unimod.sourceforge.net/intro.html Библиотека для создания автоматов: https://cyberdisk-science.googlecode.com/svn/branches/030609/docs
- 20. Скачать презентацию
Слайд 2Содержание
Автоматное программирование
Нейросети и их использование
М-автоматы
Расширенное состояние
Применение
Содержание
Автоматное программирование
Нейросети и их использование
М-автоматы
Расширенное состояние
Применение
Слайд 3Искусственный интеллект
Нисходящий подход:
Экспертные системы
Базы знаний
Business Intelligence
Восходящий подход:
Нейронные сети
Генетические алгоритмы и эволюционные вычисления
Искусственный интеллект
Нисходящий подход:
Экспертные системы
Базы знаний
Business Intelligence
Восходящий подход:
Нейронные сети
Генетические алгоритмы и эволюционные вычисления
Слайд 4Автоматное программирование
Парадигма предложена Шалыто А.А. 1991г.
Автоматное программирование
Парадигма предложена Шалыто А.А. 1991г.
Слайд 5Автоматы
Из чего состоит:
Состояния
Группы
Переходы
Использование:
Вложение
Наследование
Автоматы
Из чего состоит:
Состояния
Группы
Переходы
Использование:
Вложение
Наследование
Слайд 6Автоматы
Достоинства:
Верификация
Программа по модели, не наоборот
Документирование
Применение:
Протоколы
Компиляторы
Микроконтроллеры
Оборудование и агрегаты
Автоматы
Достоинства:
Верификация
Программа по модели, не наоборот
Документирование
Применение:
Протоколы
Компиляторы
Микроконтроллеры
Оборудование и агрегаты
Слайд 7Нейросеть
Принцип организации и функционирования биологических нейронных сетей
Норберт Винер 1943г.
Нейросеть
Принцип организации и функционирования биологических нейронных сетей
Норберт Винер 1943г.
Слайд 8Нейросеть
Этапы использования:
Сбор данных для обучения
Выбор топологии сети
Экспериментальный подбор характеристик сети и параметров
Нейросеть
Этапы использования:
Сбор данных для обучения
Выбор топологии сети
Экспериментальный подбор характеристик сети и параметров

Слайд 9Нейросеть
Недостатки:
Ограниченность применения
Сложность с обучением
Применение:
Предсказание финансовых временных рядов
Кластеризация данных
Аппроксимация
Сигнализация процессов
Нейросеть
Недостатки:
Ограниченность применения
Сложность с обучением
Применение:
Предсказание финансовых временных рядов
Кластеризация данных
Аппроксимация
Сигнализация процессов
Слайд 10М-автомат
Принятие решения:
Можно выделить несколько стадий
Есть условия и критерии
Можно выделить «путь размышления»
Автоматы мышления:
Предложены
М-автомат
Принятие решения:
Можно выделить несколько стадий
Есть условия и критерии
Можно выделить «путь размышления»
Автоматы мышления:
Предложены
Слайд 11М-автомат
Из чего состоит:
Узлы
Воздействия
Отношения
Отдельный блок решения с неочевидной реализацией
М-автомат
Из чего состоит:
Узлы
Воздействия
Отношения
Отдельный блок решения с неочевидной реализацией
Слайд 12Расширенное состояние
Состояние с нейросетью
Взаимодействие с нейросетью на входе в состояние
Расширенное состояние
Состояние с нейросетью
Взаимодействие с нейросетью на входе в состояние
Слайд 13Расширенное состояние
Строим путь принятия решения
Состояние само создает воздействие
Выделяем блок принятия решения в
Расширенное состояние
Строим путь принятия решения
Состояние само создает воздействие
Выделяем блок принятия решения в
Слайд 14Расширенное состояние
Параметры:
Тип нейросети
Количество входов, выходов
Список воздействий
Обучение:
На этапе создания
В процессе работы – автомат
Расширенное состояние
Параметры:
Тип нейросети
Количество входов, выходов
Список воздействий
Обучение:
На этапе создания
В процессе работы – автомат
Слайд 15Пример
Условия:
Кто: ежик – ходит вперед, ест грибы
Грибы – разный вес (10, 20,
Пример
Условия:
Кто: ежик – ходит вперед, ест грибы
Грибы – разный вес (10, 20,
Слайд 16Пример
Обученный:
Не отравился
Результат : 110
Не обученный:
Два раза отравился
Результат: 30
Пример
Обученный:
Не отравился
Результат : 110
Не обученный:
Два раза отравился
Результат: 30
Слайд 17Направление развитие
Применение :
Датчики и сигнализация
Комплексный анализ
Развитие:
Эксперименты
Сталкивание с генетическими алгоритмами
Направление развитие
Применение :
Датчики и сигнализация
Комплексный анализ
Развитие:
Эксперименты
Сталкивание с генетическими алгоритмами
Слайд 18Ссылки
Автоматное программирование: http://is.ifmo.ru
UniMod http://unimod.sourceforge.net/intro.html
Библиотека для создания автоматов: https://cyberdisk-science.googlecode.com/svn/branches/030609/docs
Ссылки
Автоматное программирование: http://is.ifmo.ru
UniMod http://unimod.sourceforge.net/intro.html
Библиотека для создания автоматов: https://cyberdisk-science.googlecode.com/svn/branches/030609/docs
 Идейно-художественное своеобразие произведения М.Ю. Лермонтова
Идейно-художественное своеобразие произведения М.Ю. Лермонтова Презентация на тему Гигиена органа слуха
Презентация на тему Гигиена органа слуха Площадь прямоугольного треугольника: алгоритм нахождения площади треугольника
Площадь прямоугольного треугольника: алгоритм нахождения площади треугольника Определение права, размера и сроков назначения трудовых пенсий
Определение права, размера и сроков назначения трудовых пенсий Коммерческое предложение от Laika Logistics
Коммерческое предложение от Laika Logistics СПИД Синдром приобретённого иммунного дефицита
СПИД Синдром приобретённого иммунного дефицита Статья 5. Никто не должен подвергаться пыткам или жестоким, бесчеловечным или унижающим достоинство обращению и наказанию
Статья 5. Никто не должен подвергаться пыткам или жестоким, бесчеловечным или унижающим достоинство обращению и наказанию Шрифтовая графика и типографика. Портфолио учебных работ
Шрифтовая графика и типографика. Портфолио учебных работ Марина Ивановна Цветаева. Биография поэта и поэтическое творчество
Марина Ивановна Цветаева. Биография поэта и поэтическое творчество Появился заказчик. Что делать?
Появился заказчик. Что делать? Причинно-следственный анализ
Причинно-следственный анализ Графическая работа. Проекции группы тел
Графическая работа. Проекции группы тел ФРАНЦИЯ
ФРАНЦИЯ People. Фотоальбом
People. Фотоальбом Сочинение по картине Ивана Ивановича Фирсова «Юный живописец»
Сочинение по картине Ивана Ивановича Фирсова «Юный живописец» powerpointstore.com_w57
powerpointstore.com_w57 Презентация на тему: «Похмелье»
Презентация на тему: «Похмелье» Государство, его признаки и формы
Государство, его признаки и формы Команда B2O
Команда B2O Бала құқықтары туралы
Бала құқықтары туралы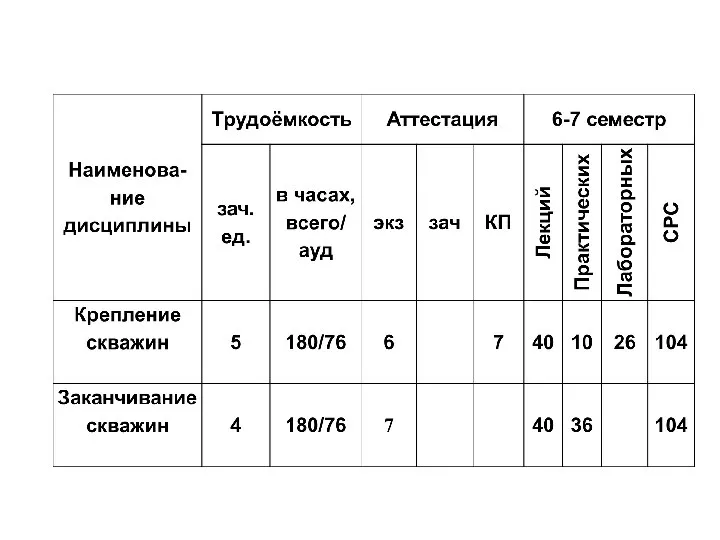 Крепление скважин
Крепление скважин Приложение №8 к административному регламенту
Приложение №8 к административному регламенту Команда Вознесенской школы впервые участвовавшая в краевых ( восточная зона) соревнованиях.
Команда Вознесенской школы впервые участвовавшая в краевых ( восточная зона) соревнованиях. «Опыт создания и деятельность Объединения РаЭл»
«Опыт создания и деятельность Объединения РаЭл» Школа панацея 17.09.2020
Школа панацея 17.09.2020 Тема проекта:«Как человек использует свойства воды?»
Тема проекта:«Как человек использует свойства воды?» Презентация на тему Насекомые рекордсмены
Презентация на тему Насекомые рекордсмены  Буквы Е и И в приставках НЕ - и НИ - отрицательных наречий
Буквы Е и И в приставках НЕ - и НИ - отрицательных наречий