- Основы построения зенитных ракетных комплексов

Содержание
- 2. ТЕМА №3 Занятие №1 АВТОМАТИКА ЗРК 1. Основные понятия и классификация систем автоматики. Структура и принцип
- 3. ОСНОВНЫЕ ПОНЯТИЯ И КЛАСИФИКАЦИЯ СИСТЕМ АВТОМАТИКИ. СТРУКТУРА И ПРИНЦИП ДЕЙСТВИЯ СИСТЕМ АВТОМАТИКИ. Вопрос 1.
- 4. Система АУ (САУ) – комплекс устройств, предназначенный для автоматического изменения одного или нескольких параметров объекта управления
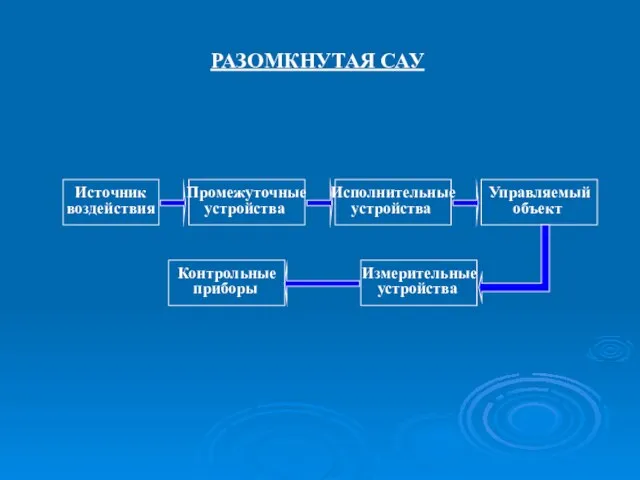
- 5. РАЗОМКНУТАЯ САУ Источник воздействия Промежуточные устройства Исполнительные устройства Управляемый объект Контрольные приборы Измерительные устройства
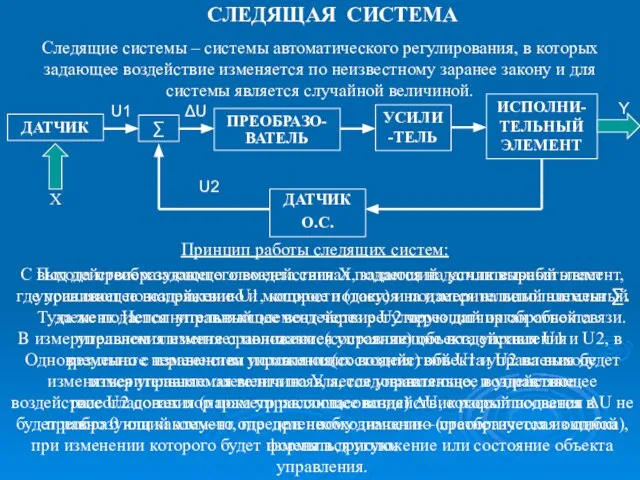
- 7. Под действием задающего воздействия Х, задающий датчик вырабатывает управляющее воздействие U1, которое подается на измерительный элемент
- 8. ДАТЧИКИ СЛЕДЯЩИХ СИСТЕМ Вопрос 2.
- 9. ДАТЧИК – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (давление, температуру, частоту,
- 10. В состав датчика входят: чувствительный (воспринимающий) элемент; промежуточный преобразователь (один или несколько).
- 11. Характерными видами контролируемых физических величин в ЗРК являются: угловые перемещения; угловые скорости перемещения; линейные ускорения; другие.
- 12. В зависимости от физических принципов чувствительности и преобразования в электрический сигнал датчики можно классифицировать на: потенциометрические;
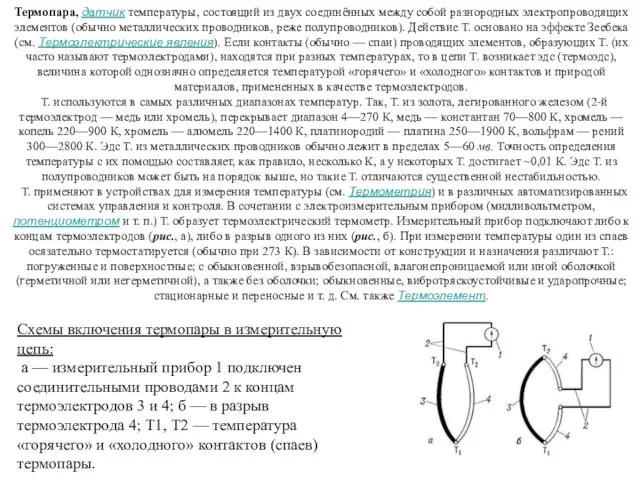
- 13. Схемы включения термопары в измерительную цепь: а — измерительный прибор 1 подключен соединительными проводами 2 к
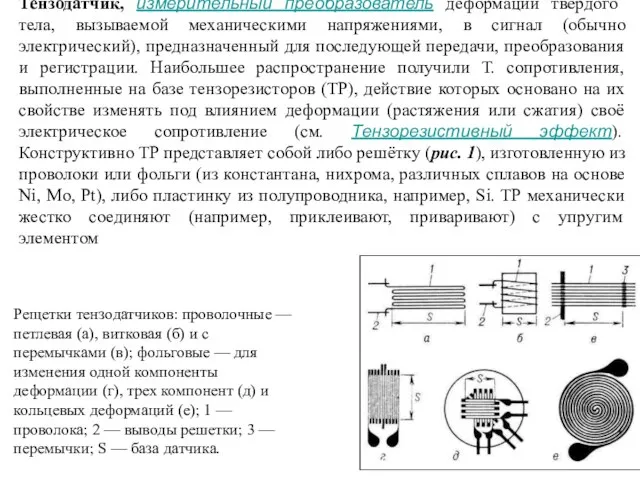
- 14. Рещетки тензодатчиков: проволочные — петлевая (а), витковая (б) и с перемычками (в); фольговые — для изменения
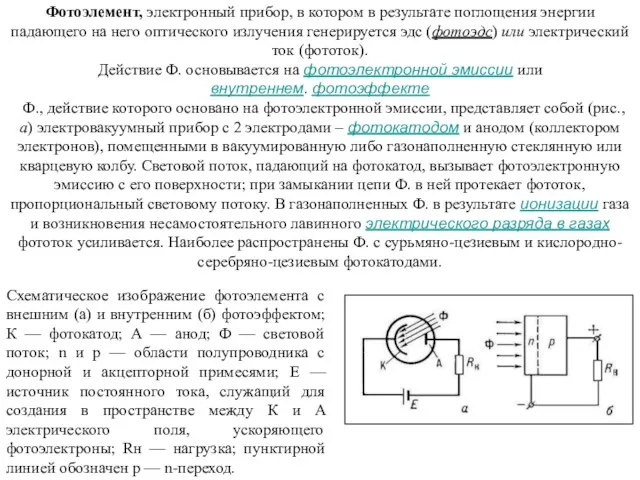
- 15. Схематическое изображение фотоэлемента с внешним (а) и внутренним (б) фотоэффектом; К — фотокатод; А — анод;
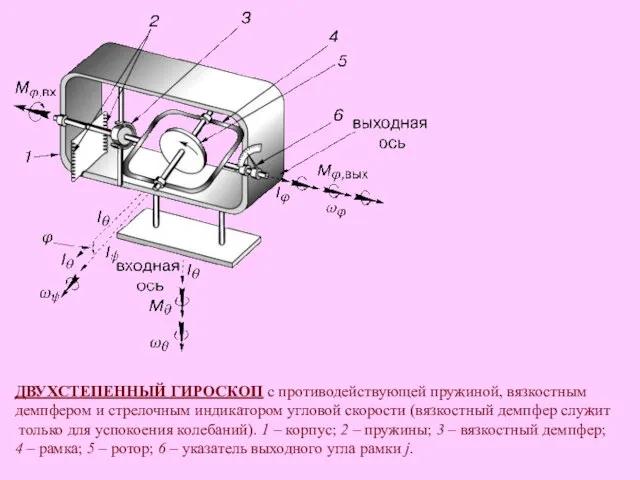
- 16. ДВУХСТЕПЕННЫЙ ГИРОСКОП с противодействующей пружиной, вязкостным демпфером и стрелочным индикатором угловой скорости (вязкостный демпфер служит только
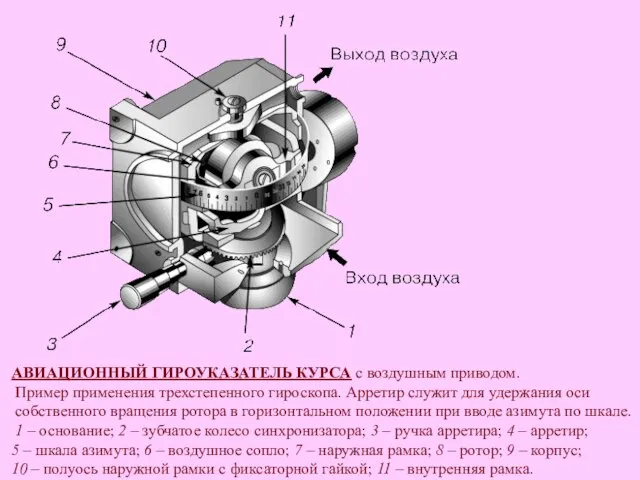
- 17. АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом. Пример применения трехстепенного гироскопа. Арретир служит для удержания оси собственного
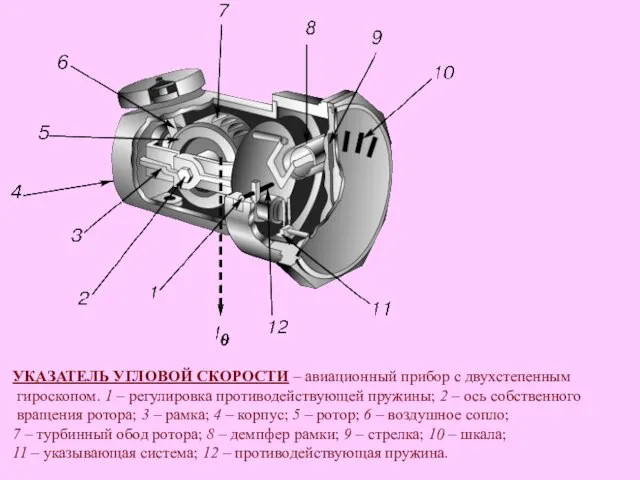
- 18. УКАЗАТЕЛЬ УГЛОВОЙ СКОРОСТИ – авиационный прибор с двухстепенным гироскопом. 1 – регулировка противодействующей пружины; 2 –
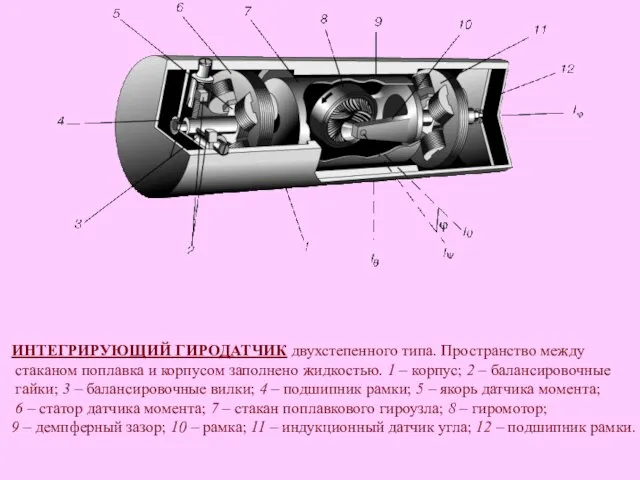
- 19. ИНТЕГРИРУЮЩИЙ ГИРОДАТЧИК двухстепенного типа. Пространство между стаканом поплавка и корпусом заполнено жидкостью. 1 – корпус; 2
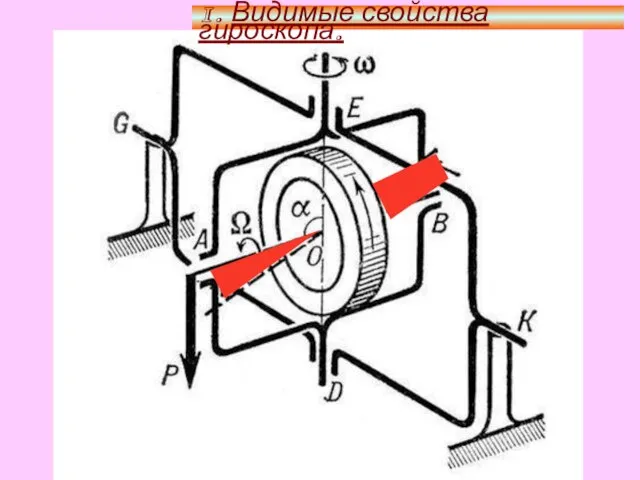
- 20. 1. Видимые свойства гироскопа.
- 21. СИСТЕМЫ СОПРОВОЖДЕНИЯ ЦЕЛИ ПО УГЛОВЫМ КООРДИНАТАМ Вопрос 3.
- 22. Волноводный тракт Облучатель Двигатель облучателя Передающая система Смеситель – преобразователь ГОН ИД по β Усилитель мощности
- 23. Катушка коррекции Катушка вращения Амплитудный детектор Усилитель сигнала коррекции Преобразовательно – усилительный элемент СТА ТОР Оптическая
- 25. Скачать презентацию
Слайд 2ТЕМА №3
Занятие №1
АВТОМАТИКА ЗРК
1. Основные понятия и классификация систем автоматики. Структура и
ТЕМА №3
Занятие №1
АВТОМАТИКА ЗРК
1. Основные понятия и классификация систем автоматики. Структура и
Слайд 3ОСНОВНЫЕ ПОНЯТИЯ И
КЛАСИФИКАЦИЯ СИСТЕМ
АВТОМАТИКИ.
СТРУКТУРА
И ПРИНЦИП ДЕЙСТВИЯ
СИСТЕМ АВТОМАТИКИ.
Вопрос 1.
ОСНОВНЫЕ ПОНЯТИЯ И
КЛАСИФИКАЦИЯ СИСТЕМ
АВТОМАТИКИ.
СТРУКТУРА
И ПРИНЦИП ДЕЙСТВИЯ
СИСТЕМ АВТОМАТИКИ.
Вопрос 1.
Слайд 4Система АУ (САУ) – комплекс устройств, предназначенный для автоматического изменения одного или
Система АУ (САУ) – комплекс устройств, предназначенный для автоматического изменения одного или
Слайд 5РАЗОМКНУТАЯ САУ
Источник
воздействия
Промежуточные
устройства
Исполнительные
устройства
Управляемый
объект
Контрольные
приборы
Измерительные
устройства
РАЗОМКНУТАЯ САУ
Источник
воздействия
Промежуточные
устройства
Исполнительные
устройства
Управляемый
объект
Контрольные
приборы
Измерительные
устройства
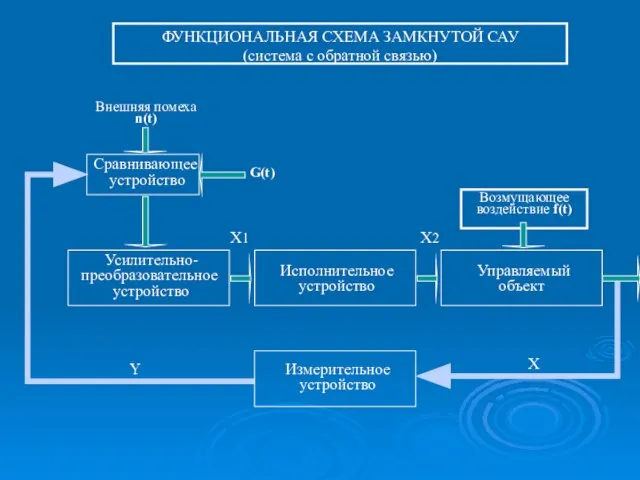
Слайд 7Под действием задающего воздействия Х, задающий датчик вырабатывает управляющее воздействие U1, которое
Под действием задающего воздействия Х, задающий датчик вырабатывает управляющее воздействие U1, которое
Слайд 8ДАТЧИКИ СЛЕДЯЩИХ
СИСТЕМ
Вопрос 2.
ДАТЧИКИ СЛЕДЯЩИХ
СИСТЕМ
Вопрос 2.
Слайд 9ДАТЧИК – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую
ДАТЧИК – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую
Слайд 10В состав датчика входят:
чувствительный (воспринимающий) элемент;
промежуточный преобразователь (один или несколько).
В состав датчика входят:
чувствительный (воспринимающий) элемент;
промежуточный преобразователь (один или несколько).
Слайд 11Характерными видами контролируемых физических величин в ЗРК являются:
угловые перемещения;
угловые скорости
Характерными видами контролируемых физических величин в ЗРК являются:
угловые перемещения;
угловые скорости
Слайд 12В зависимости от физических принципов чувствительности и преобразования в электрический сигнал датчики
В зависимости от физических принципов чувствительности и преобразования в электрический сигнал датчики
Слайд 13Схемы включения термопары в измерительную цепь:
а — измерительный прибор 1 подключен
Схемы включения термопары в измерительную цепь:
а — измерительный прибор 1 подключен
Слайд 14Рещетки тензодатчиков: проволочные — петлевая (а), витковая (б) и с перемычками (в);
Рещетки тензодатчиков: проволочные — петлевая (а), витковая (б) и с перемычками (в);
Слайд 15Схематическое изображение фотоэлемента с внешним (а) и внутренним (б) фотоэффектом; К —
Схематическое изображение фотоэлемента с внешним (а) и внутренним (б) фотоэффектом; К —
Слайд 16ДВУХСТЕПЕННЫЙ ГИРОСКОП с противодействующей пружиной, вязкостным
демпфером и стрелочным индикатором угловой скорости
ДВУХСТЕПЕННЫЙ ГИРОСКОП с противодействующей пружиной, вязкостным
демпфером и стрелочным индикатором угловой скорости
Слайд 17АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом.
Пример применения трехстепенного гироскопа. Арретир служит
АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом.
Пример применения трехстепенного гироскопа. Арретир служит
Слайд 18УКАЗАТЕЛЬ УГЛОВОЙ СКОРОСТИ – авиационный прибор с двухстепенным
гироскопом. 1 – регулировка
УКАЗАТЕЛЬ УГЛОВОЙ СКОРОСТИ – авиационный прибор с двухстепенным
гироскопом. 1 – регулировка
Слайд 19ИНТЕГРИРУЮЩИЙ ГИРОДАТЧИК двухстепенного типа. Пространство между
стаканом поплавка и корпусом заполнено жидкостью.
ИНТЕГРИРУЮЩИЙ ГИРОДАТЧИК двухстепенного типа. Пространство между
стаканом поплавка и корпусом заполнено жидкостью.
Слайд 201. Видимые свойства гироскопа.
1. Видимые свойства гироскопа.
Слайд 21СИСТЕМЫ СОПРОВОЖДЕНИЯ
ЦЕЛИ
ПО УГЛОВЫМ КООРДИНАТАМ
Вопрос 3.
СИСТЕМЫ СОПРОВОЖДЕНИЯ
ЦЕЛИ
ПО УГЛОВЫМ КООРДИНАТАМ
Вопрос 3.
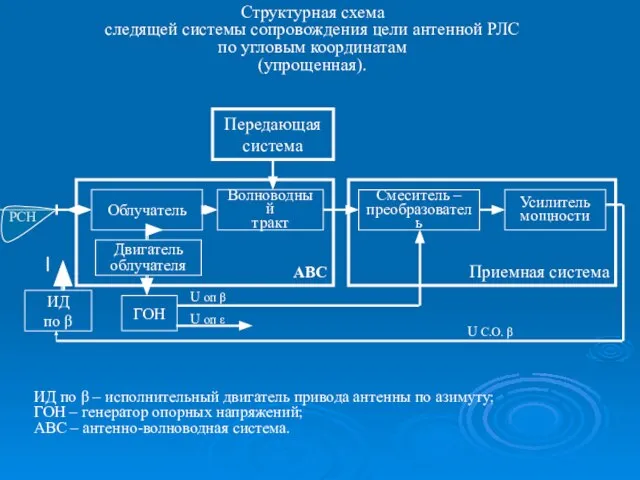
Слайд 22Волноводный
тракт
Облучатель
Двигатель
облучателя
Передающая
система
Смеситель –
преобразователь
ГОН
ИД
по β
Усилитель
мощности
АВС
Приемная система
Структурная схема
следящей системы сопровождения цели антенной РЛС
по угловым
Волноводный
тракт
Облучатель
Двигатель
облучателя
Передающая
система
Смеситель –
преобразователь
ГОН
ИД
по β
Усилитель
мощности
АВС
Приемная система
Структурная схема
следящей системы сопровождения цели антенной РЛС
по угловым
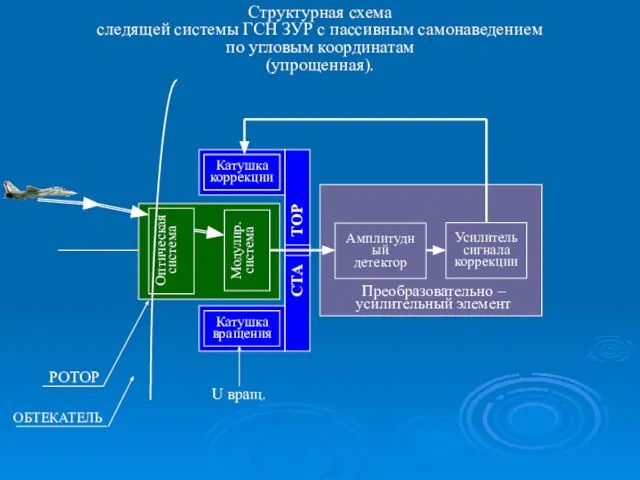
Слайд 23Катушка
коррекции
Катушка
вращения
Амплитудный
детектор
Усилитель
сигнала
коррекции
Преобразовательно –
усилительный элемент
СТА ТОР
Оптическая
система
Модулир. система
Структурная схема
следящей системы ГСН ЗУР с
Катушка
коррекции
Катушка
вращения
Амплитудный
детектор
Усилитель
сигнала
коррекции
Преобразовательно –
усилительный элемент
СТА ТОР
Оптическая
система
Модулир. система
Структурная схема
следящей системы ГСН ЗУР с
 Стартап By Mikokit. Бизнес-модель
Стартап By Mikokit. Бизнес-модель Закон Архимеда
Закон Архимеда Программа “Процент с продаж”. Предложение по социальному маркетигу
Программа “Процент с продаж”. Предложение по социальному маркетигу Режим дня
Режим дня  Звенящая нежность
Звенящая нежность Обобщенная трудовая функция
Обобщенная трудовая функция Noize Mc Последний альбом
Noize Mc Последний альбом Есть ли жизнь в Солнечной системе?
Есть ли жизнь в Солнечной системе? «Загадочный Гоголь»
«Загадочный Гоголь» Исследование «Экология д.Новосёлово»
Исследование «Экология д.Новосёлово» Волшебное путешествие к мечте
Волшебное путешествие к мечте учим мемберов стрей кидс!
учим мемберов стрей кидс! Презентация на тему Файл Файловая система
Презентация на тему Файл Файловая система  Механическое движение 9 класс
Механическое движение 9 класс Клавиатура
Клавиатура Оценка физического развития и функциональной подготовленности студента. Шаблон
Оценка физического развития и функциональной подготовленности студента. Шаблон Презентация на тему Что изучает физика 7 класс
Презентация на тему Что изучает физика 7 класс Утренняя зарядка. Заряжайся вместе с нами!
Утренняя зарядка. Заряжайся вместе с нами! Презентация на тему Очистка сточных вод
Презентация на тему Очистка сточных вод  Импрессионизм в музыке и живописи
Импрессионизм в музыке и живописи Лес Карельского перешейка в гостинично-коттеджный комплекс Коробицыно-каскад
Лес Карельского перешейка в гостинично-коттеджный комплекс Коробицыно-каскад Организация и вооружение подразделений Сухопутных войск. Виды вооруженных сил, рода войск
Организация и вооружение подразделений Сухопутных войск. Виды вооруженных сил, рода войск Внеурочная деятельность школьников
Внеурочная деятельность школьников Транспортная логистика. Грузовые тарифы
Транспортная логистика. Грузовые тарифы Click to edit Master title style Click to edit Master subtitle style
Click to edit Master title style Click to edit Master subtitle style  «Не» с существительными
«Не» с существительными Методическое объединение педагогов дополнительного образования и учителей художественно-эстетического цикла
Методическое объединение педагогов дополнительного образования и учителей художественно-эстетического цикла Терешкова Валентина Владимировна
Терешкова Валентина Владимировна