- Основы промышленной автоматизации

Содержание
- 2. Министерство образования и науки РФ Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Уральский федеральный университет
- 3. УДК 621.3:658.2.016 Автор-составитель: В. В. Гоман Научный редактор: канд. техн. наук, доц., зав. каф. АТПС НТИ
- 4. Основные определения SIMATC Под автоматизацией производственных процессов понимается выполнение этих процессов с ограниченным участием человека. Соответственно
- 5. Основные определения SIMATC Автоматизация нулевого уровня имеет место быть, когда участие человека исключается только при выполнении
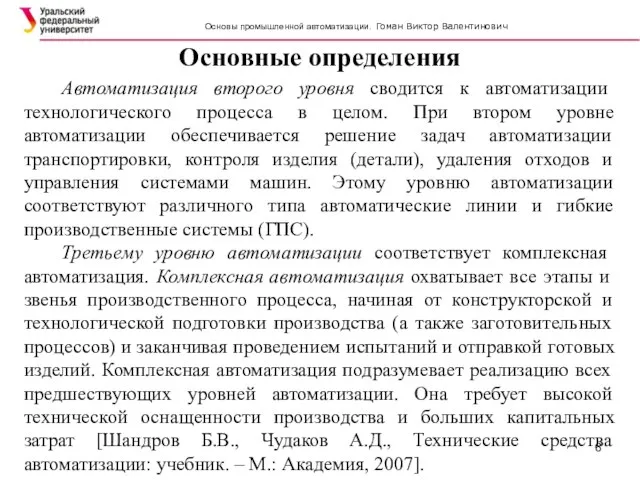
- 6. Основные определения SIMATC Автоматизация второго уровня сводится к автоматизации технологического процесса в целом. При втором уровне
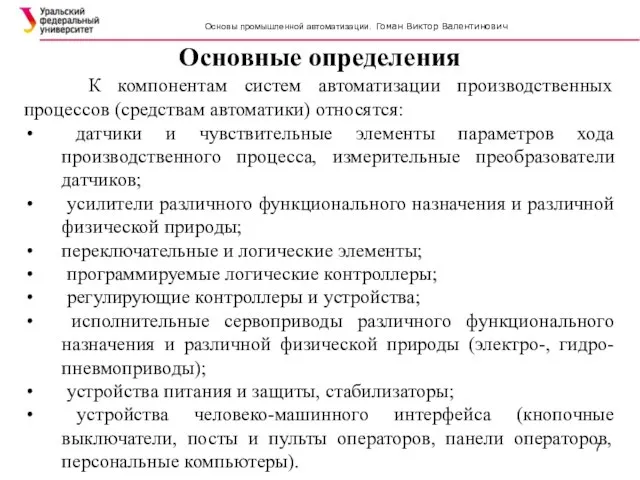
- 7. Основные определения SIMATC К компонентам систем автоматизации производственных процессов (средствам автоматики) относятся: датчики и чувствительные элементы
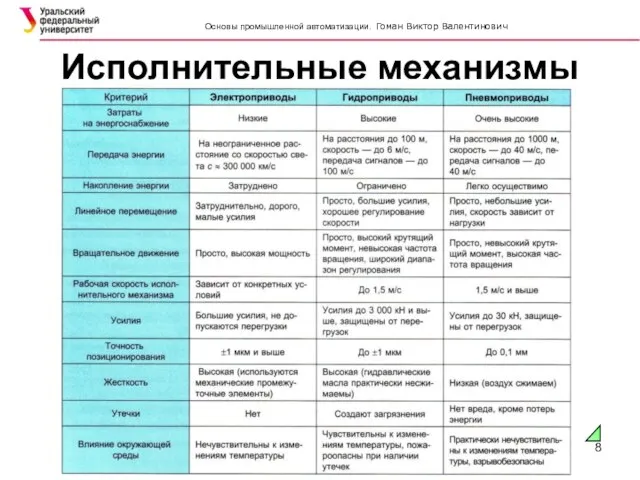
- 8. Исполнительные механизмы SIMATIC
- 9. Релейно-контактная автоматика. Виды контактов SIMATIC
- 10. Релейно-контактная автоматика. Кнопочный выключатель SIMATIC
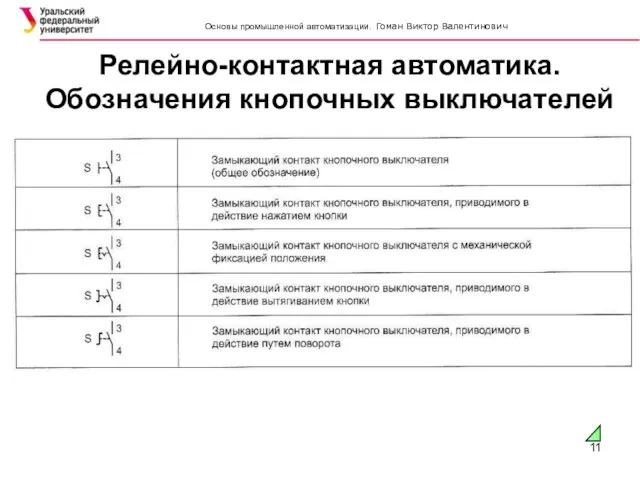
- 11. Релейно-контактная автоматика. Обозначения кнопочных выключателей SIMATIC
- 12. Релейно-контактная автоматика. Пример схемы SIMATIC
- 13. Релейно-контактная автоматика. Концевые выключатели SIMATIC
- 14. Релейно-контактная автоматика. Герметичные контакты (герконы) SIMATIC
- 15. Релейно-контактная автоматика. Реле. SIMATIC
- 16. Релейно-контактная автоматика. Пример схемы с реле SIMATIC
- 17. Схема нереверсивного управления асинхронным электродвигателем SIMATIC
- 18. Схема реверсивного управления асинхронным электродвигателем SIMATIC
- 19. Схема управления сварочным полуавтоматом SIMATIC
- 20. Схема управления сварочным автоматом SIMATIC
- 21. Виды современных управляющих устройств в системах автоматики SIMATIC Микроконтроллеры (AVR – Atmel, Atmega и др., Microchip
- 22. Языки программирования ПЛК SIMATIC Стандарт МЭК (IEC) 61131-03: LD – Ladder Diagram – программная реализация релейно-контактных
- 23. Программные средства программирования ПЛК SIMATIC Универсальные средства: CodeSys, IsaGraf и другие. Специализированное ПО производителей ПЛК, например
- 24. Основные логические функции SIMATIC
- 25. Основные логические функции SIMATIC 0
- 26. Триггеры SIMATIC
- 27. Триггеры SIMATIC Кроме RS-триггеров существуют и другие виды цифровых электронных устройств-триггеров. При разработке программ для ПЛК
- 28. Циклическая работа ПЛК SIMATIC Рабочий цикл PLC состоит из нескольких стадий: 1. Начало цикла. 2. Чтение
- 29. Семейство SIMATIC S7 SIMATIC
- 30. Обзор SIMATIC
- 31. ПЛК S7-200
- 32. Модули S7-200 EM
- 33. Конструкция CPU S7-200
- 34. ПЛК S7-300
- 35. Модули S7-300 PS (не обяза- тельно)
- 36. CPU315-2 DP SIEMENS RUN-P RUN STOP M RES SIMATIC S7-300 Batterie DP MPI SF DP BUSF
- 37. ПЛК S7-400
- 38. Модули S7-400 PS
- 39. Конструкция CPU S7-400 (Часть 1) Например, CPU412-1 Например, CPU416-2DP
- 40. Конструкция CPU S7-400 (Часть 2)
- 41. ПЛК S7-1200
- 42. ПЛК S7-1200
- 43. ПЛК S7-1200 Три типа центральных процессоров различной производительности. Три модификации каждого типа процессора, отличающиеся напряжениями питания
- 44. Особенности проектирования систем управления на базе ПЛК Необходимо оценить необходимость применения ПЛК. Простые задачи управления легко
- 45. Пример экрана SCADA системы
- 46. Пример экрана SCADA системы
- 47. Основные функции SCADA систем
- 48. Датчики систем автоматического управления Датчик – это преобразователь контролируемой физической величины в сигнал, удобный для последующего
- 49. Классификация датчиков По виду сигнала на выходе: Генераторный датчик – выдает электрический заряд, напряжение или ток,
- 50. Классификация датчиков По виду сигнала на входе: Датчики положения, скорости, ускорения и т.д.; Датчики электрических величин;
- 51. Основные типы датчиков и выключателей по принципу действия Индуктивный (явление самоиндукции) Индукционный (явление наведения ЭДС) Емкостный
- 52. Датчики скорости и положения 1. Косвенное измерение скорости (тахометрический мост, измерение через ЭДС ДПТ и др.)
- 53. Инкрементальный энкодер
- 54. Инкрементальный энкодер Инкрементальные энкодеры предназначены для определения скорости вращения валов различных механизмов. Внутри энкодера жестко с
- 55. Абсолютный энкодер
- 56. Абсолютный энкодер Под абсолютными энкодерами подразумевают датчики угла поворота, каждому положению вала которых соответствует определённый уникальный
- 57. Энкодеры
- 58. Энкодеры
- 59. Энкодеры
- 60. Энкодеры
- 61. Энкодеры
- 62. Позиционирование
- 63. Позиционирование
- 64. Позиционирование
- 65. Позиционирование
- 66. Позиционирование
- 67. Позиционирование
- 68. Позиционирование
- 69. Позиционирование
- 70. Позиционирование
- 71. Позиционирование
- 72. Позиционирование
- 73. Позиционирование
- 74. Позиционирование
- 75. Позиционирование
- 76. Позиционирование
- 77. Позиционирование
- 78. Позиционирование
- 79. Позиционирование
- 80. Видеосенсоры
- 81. Видеосенсоры
- 82. Контроллер кулачкового переключателя
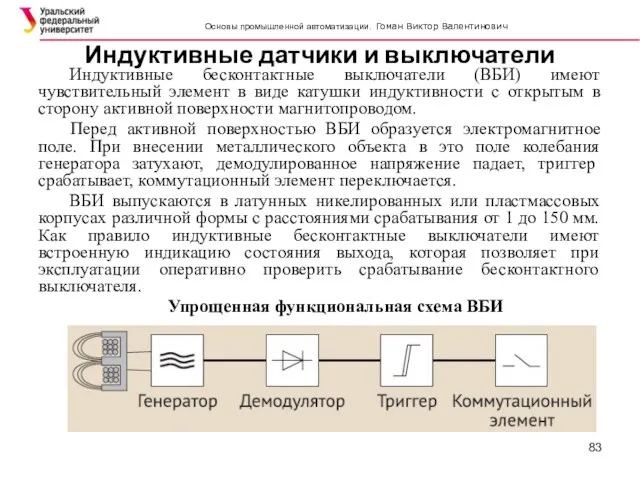
- 83. Индуктивные датчики и выключатели Индуктивные бесконтактные выключатели (ВБИ) имеют чувствительный элемент в виде катушки индуктивности с
- 84. Индуктивные датчики
- 85. Индуктивные датчики
- 86. Индуктивные датчики
- 87. Индуктивные датчики
- 88. Индуктивные датчики
- 89. Индуктивные датчики
- 90. Индуктивные датчики
- 91. Индуктивные датчики
- 92. Индуктивные датчики
- 93. Индуктивные датчики
- 94. Индуктивные датчики
- 95. Индуктивные датчики
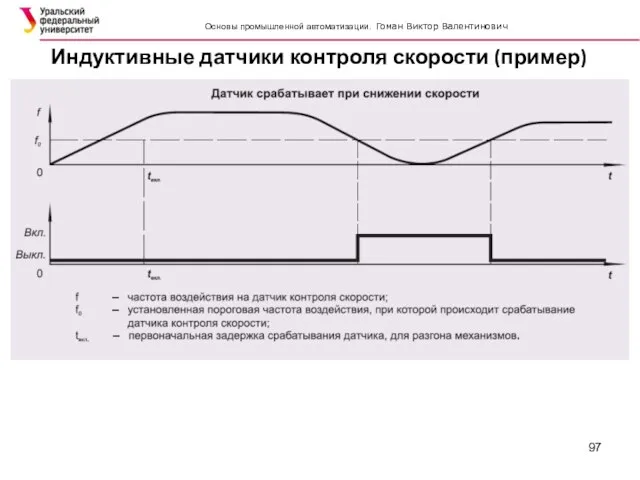
- 96. Индуктивные датчики контроля скорости (пример) Датчик контроля скорости серии ДКС предназначен, в первую очередь, для контроля
- 97. Индуктивные датчики контроля скорости (пример)
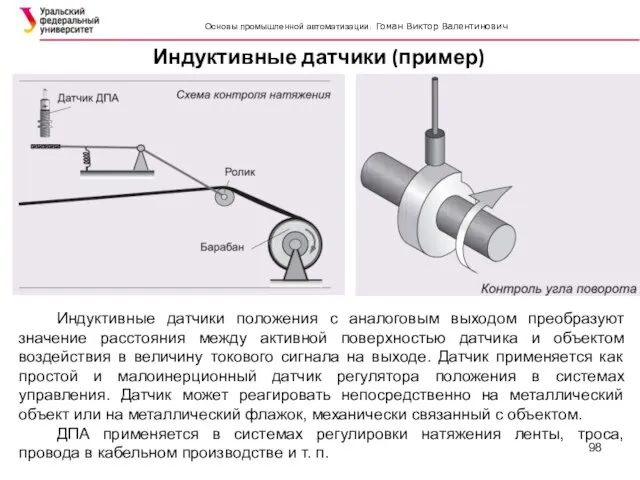
- 98. Индуктивные датчики (пример) Индуктивные датчики положения с аналоговым выходом преобразуют значение расстояния между активной поверхностью датчика
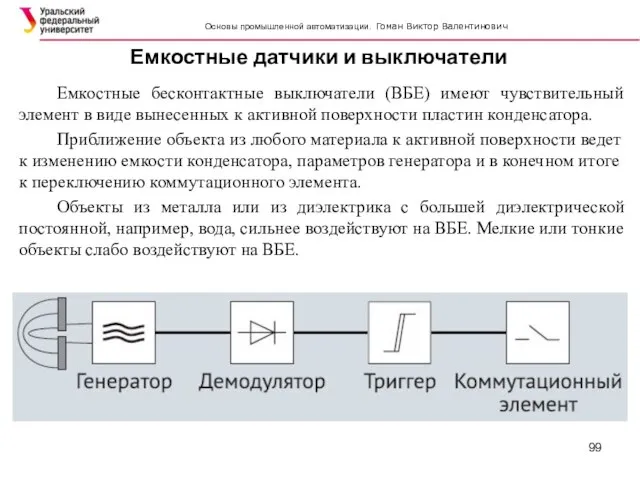
- 99. Емкостные датчики и выключатели Емкостные бесконтактные выключатели (ВБЕ) имеют чувствительный элемент в виде вынесенных к активной
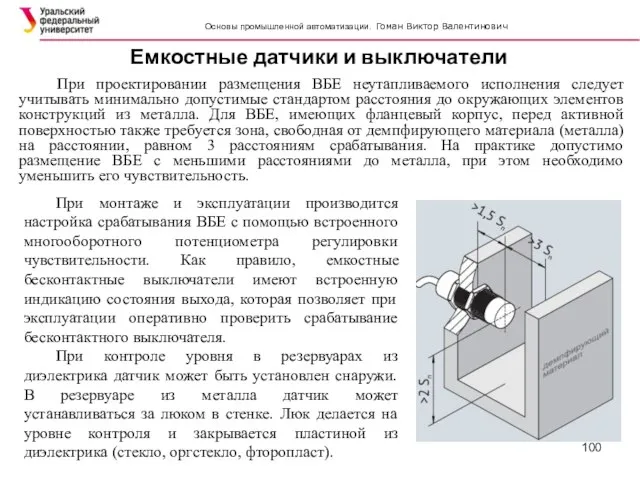
- 100. Емкостные датчики и выключатели При проектировании размещения ВБЕ неутапливаемого исполнения следует учитывать минимально допустимые стандартом расстояния
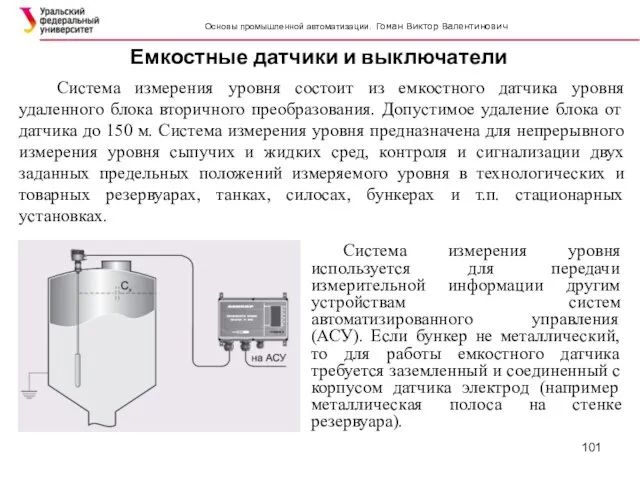
- 101. Емкостные датчики и выключатели Система измерения уровня состоит из емкостного датчика уровня удаленного блока вторичного преобразования.
- 102. Емкостные датчики и выключатели Принцип действия датчика основан на зависимости электрической емкости чувствительного элемента датчика от
- 103. Оптические (фотоэлектрические) датчики и выключатели В соответствии с ГОСТ Р 50030.5.2 оптические бесконтактные выключатели (ВБО) классифицируются
- 104. Оптические (фотоэлектрические) датчики и выключатели Тип Т ВБО типа Т характеризуется тем, что излучатель и приемник
- 105. Оптические (фотоэлектрические) датчики и выключатели Тип R ВБО типа R имеет размещенный в одном корпусе излучатель
- 106. Оптические (фотоэлектрические) датчики и выключатели Тип D ВБО типа D имеет размещенный в одном корпусе излучатель
- 107. Оптические (фотоэлектрические) датчики и выключатели Особенности эксплуатации ВБО определяются особенностями распространения инфракрасного излучения. Наличие факторов, ухудшающих
- 108. Оптические (фотоэлектрические) датчики и выключатели
- 109. Оптические (фотоэлектрические) датчики и выключатели
- 110. Оптические (фотоэлектрические) датчики и выключатели
- 111. Оптические (фотоэлектрические) датчики и выключатели
- 112. Оптические (фотоэлектрические) датчики и выключатели
- 113. Оптические (фотоэлектрические) датчики и выключатели
- 114. Оптические (фотоэлектрические) датчики и выключатели
- 115. Оптические (фотоэлектрические) датчики и выключатели
- 116. Оптические (фотоэлектрические) датчики и выключатели
- 117. Оптические (фотоэлектрические) датчики и выключатели
- 118. Оптические (фотоэлектрические) датчики и выключатели
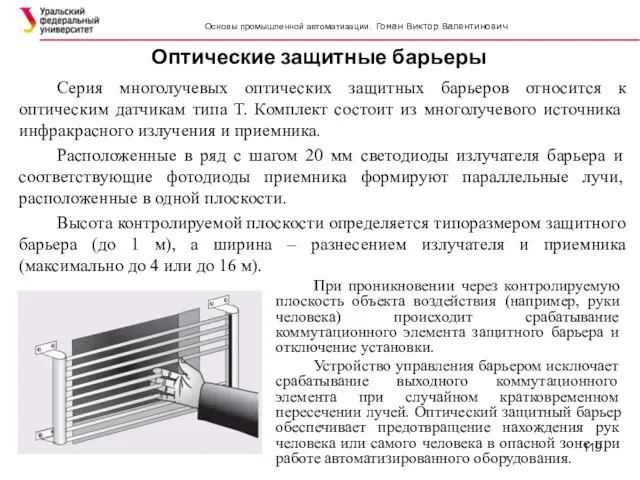
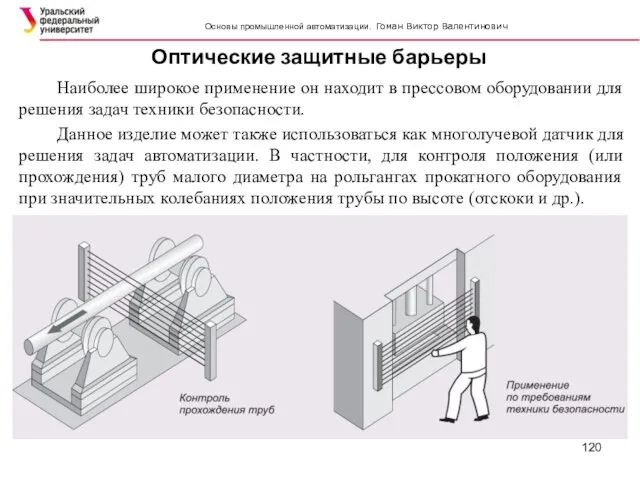
- 119. Оптические защитные барьеры Серия многолучевых оптических защитных барьеров относится к оптическим датчикам типа Т. Комплект состоит
- 120. Оптические защитные барьеры Наиболее широкое применение он находит в прессовом оборудовании для решения задач техники безопасности.
- 121. Оптическая многолучевая линейка Комплект состоит из многолучевого источника инфракрасного излучения и приемника. Лучи располагаются в одной
- 122. Оптические датчики метки Оптические датчики метки применяются в автоматических установках парфюмерной, пищевой, легкой промышленности, а конкретнее
- 123. Оптические датчики метки
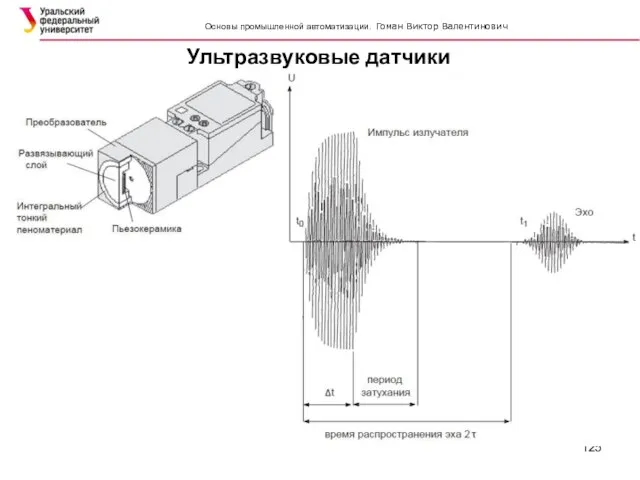
- 124. Ультразвуковые датчики Звук с частотой более чем 16 кГц не воспринимается человеческим слухом. Подобные звуки называют
- 125. Ультразвуковые датчики
- 126. Ультразвуковые датчики
- 127. Ультразвуковые датчики
- 128. Ультразвуковые датчики
- 129. Общие рекомендации по выбору и применению датчиков Выбор при проектировании нового или модернизации существующего оборудования желательно
- 130. Выбор по виду воздействующего объекта Индуктивные датчики срабатывают при приближении объектов из металла. Объектом может служить
- 131. Выбор по параметрам коммутационного элемента Электрические параметры коммутационного элемента выключателя выбирают, исходя из параметров схемы питания
- 133. Скачать презентацию
Слайд 2Министерство образования и науки РФ
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«Уральский федеральный
Министерство образования и науки РФ
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«Уральский федеральный
Слайд 3УДК 621.3:658.2.016
Автор-составитель: В. В. Гоман
Научный редактор: канд. техн. наук, доц., зав. каф.
УДК 621.3:658.2.016
Автор-составитель: В. В. Гоман
Научный редактор: канд. техн. наук, доц., зав. каф.
Слайд 4Основные определения
SIMATC
Под автоматизацией производственных процессов понимается выполнение этих процессов с ограниченным участием
Основные определения
SIMATC
Под автоматизацией производственных процессов понимается выполнение этих процессов с ограниченным участием
Слайд 5Основные определения
SIMATC
Автоматизация нулевого уровня имеет место быть, когда участие человека исключается только
Основные определения
SIMATC
Автоматизация нулевого уровня имеет место быть, когда участие человека исключается только
Слайд 6Основные определения
SIMATC
Автоматизация второго уровня сводится к автоматизации технологического процесса в целом. При
Основные определения
SIMATC
Автоматизация второго уровня сводится к автоматизации технологического процесса в целом. При
Слайд 7Основные определения
SIMATC
К компонентам систем автоматизации производственных процессов (средствам автоматики) относятся:
датчики и
Основные определения
SIMATC
К компонентам систем автоматизации производственных процессов (средствам автоматики) относятся:
датчики и
Слайд 8Исполнительные механизмы
SIMATIC
Исполнительные механизмы
SIMATIC
Слайд 9Релейно-контактная автоматика.
Виды контактов
SIMATIC
Релейно-контактная автоматика.
Виды контактов
SIMATIC

Слайд 10Релейно-контактная автоматика.
Кнопочный выключатель
SIMATIC
Релейно-контактная автоматика.
Кнопочный выключатель
SIMATIC

Слайд 11Релейно-контактная автоматика.
Обозначения кнопочных выключателей
SIMATIC
Релейно-контактная автоматика.
Обозначения кнопочных выключателей
SIMATIC
Слайд 12Релейно-контактная автоматика.
Пример схемы
SIMATIC
Релейно-контактная автоматика.
Пример схемы
SIMATIC

Слайд 13Релейно-контактная автоматика.
Концевые выключатели
SIMATIC
Релейно-контактная автоматика.
Концевые выключатели
SIMATIC

Слайд 14Релейно-контактная автоматика.
Герметичные контакты (герконы)
SIMATIC
Релейно-контактная автоматика.
Герметичные контакты (герконы)
SIMATIC

Слайд 15Релейно-контактная автоматика. Реле.
SIMATIC
Релейно-контактная автоматика. Реле.
SIMATIC

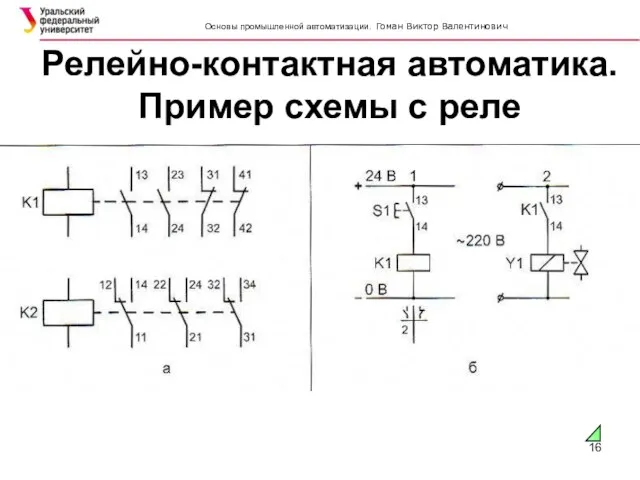
Слайд 16Релейно-контактная автоматика.
Пример схемы с реле
SIMATIC
Релейно-контактная автоматика.
Пример схемы с реле
SIMATIC
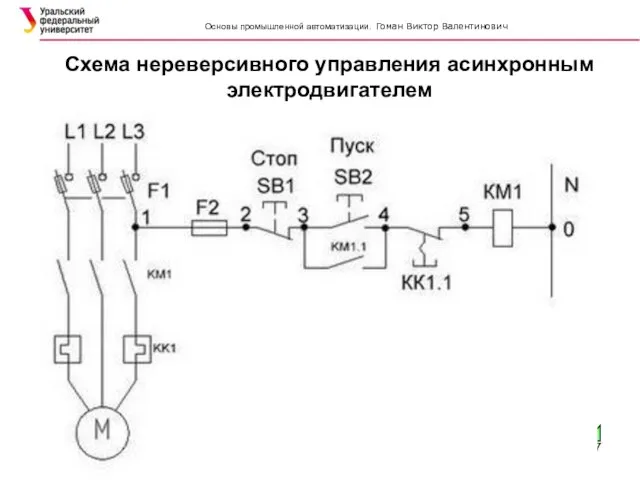
Слайд 17Схема нереверсивного управления асинхронным электродвигателем
SIMATIC
Схема нереверсивного управления асинхронным электродвигателем
SIMATIC
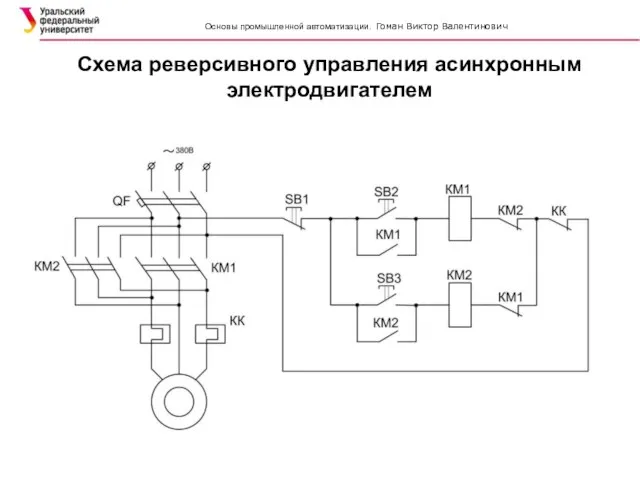
Слайд 18Схема реверсивного управления асинхронным электродвигателем
SIMATIC
Схема реверсивного управления асинхронным электродвигателем
SIMATIC
Слайд 19Схема управления сварочным полуавтоматом
SIMATIC
Схема управления сварочным полуавтоматом
SIMATIC

Слайд 20Схема управления сварочным автоматом
SIMATIC
Схема управления сварочным автоматом
SIMATIC

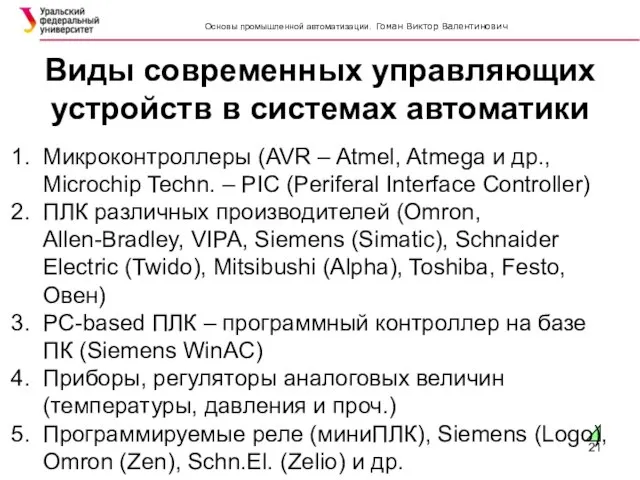
Слайд 21Виды современных управляющих устройств в системах автоматики
SIMATIC
Микроконтроллеры (AVR – Atmel, Atmega и
Виды современных управляющих устройств в системах автоматики
SIMATIC
Микроконтроллеры (AVR – Atmel, Atmega и
Слайд 22Языки программирования ПЛК
SIMATIC
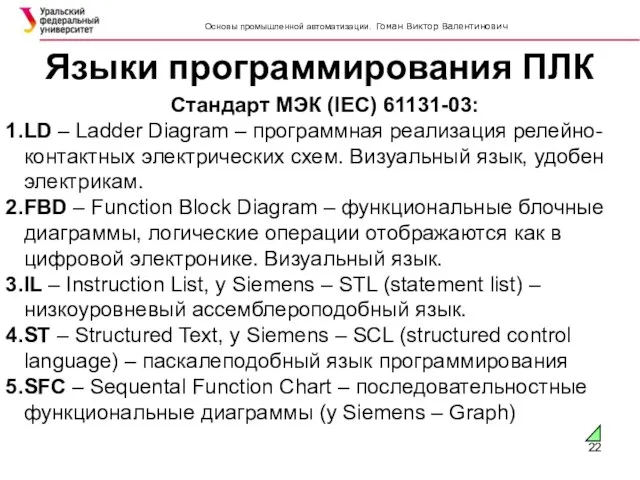
Стандарт МЭК (IEC) 61131-03:
LD – Ladder Diagram – программная реализация
Языки программирования ПЛК
SIMATIC
Стандарт МЭК (IEC) 61131-03:
LD – Ladder Diagram – программная реализация
Слайд 23Программные средства программирования ПЛК
SIMATIC
Универсальные средства: CodeSys, IsaGraf и другие.
Специализированное ПО производителей ПЛК,
Программные средства программирования ПЛК
SIMATIC
Универсальные средства: CodeSys, IsaGraf и другие.
Специализированное ПО производителей ПЛК,
Слайд 24Основные логические функции
SIMATIC
Основные логические функции
SIMATIC

Слайд 25Основные логические функции
SIMATIC
0
Основные логические функции
SIMATIC
0

Слайд 26Триггеры
SIMATIC
Триггеры
SIMATIC
Слайд 27Триггеры
SIMATIC
Кроме RS-триггеров существуют и другие виды цифровых электронных устройств-триггеров.
При разработке программ для
Триггеры
SIMATIC
Кроме RS-триггеров существуют и другие виды цифровых электронных устройств-триггеров.
При разработке программ для
Слайд 28Циклическая работа ПЛК
SIMATIC
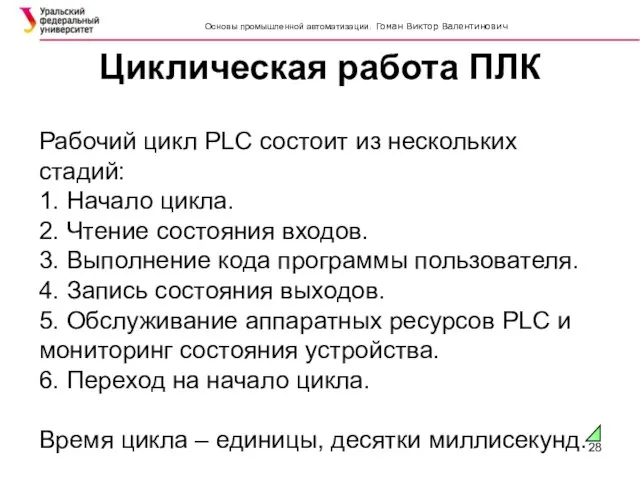
Рабочий цикл PLC состоит из нескольких стадий:
1. Начало цикла.
2. Чтение
Циклическая работа ПЛК
SIMATIC
Рабочий цикл PLC состоит из нескольких стадий:
1. Начало цикла.
2. Чтение
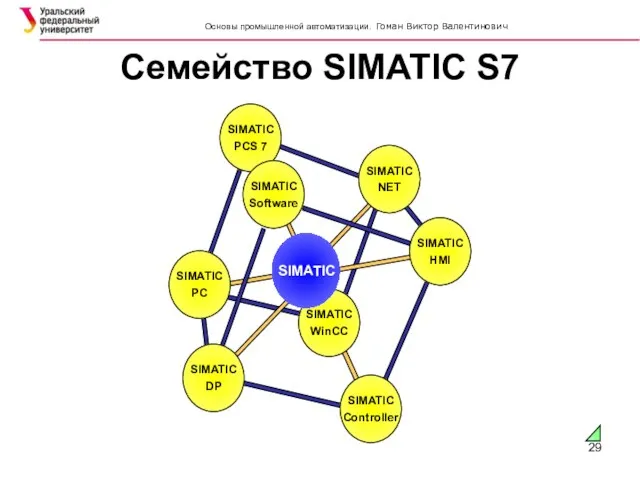
Слайд 29Семейство SIMATIC S7
SIMATIC
Семейство SIMATIC S7
SIMATIC
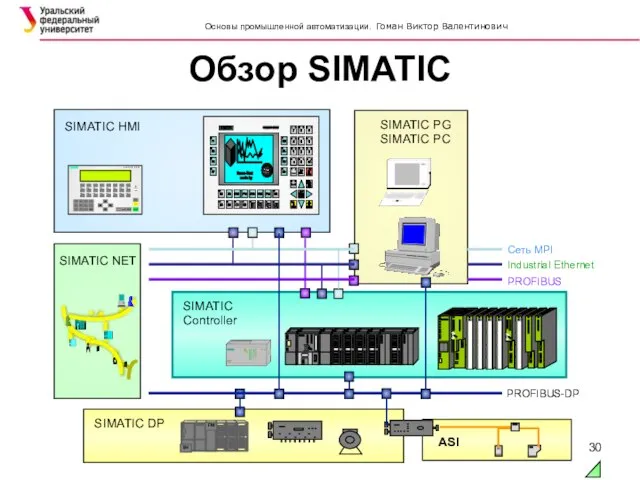
Слайд 30Обзор SIMATIC
Обзор SIMATIC
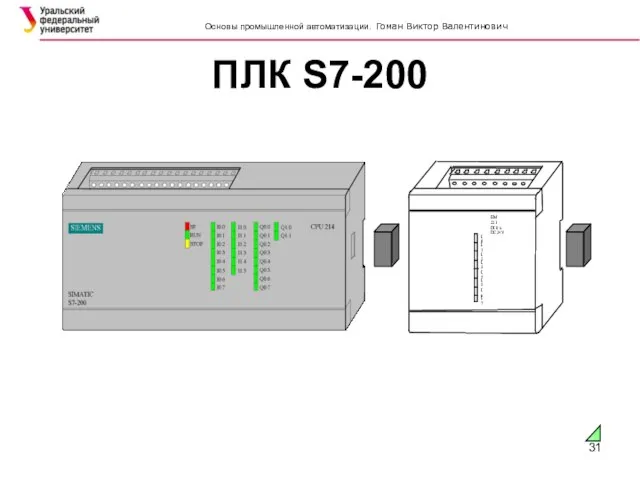
Слайд 31ПЛК S7-200
ПЛК S7-200
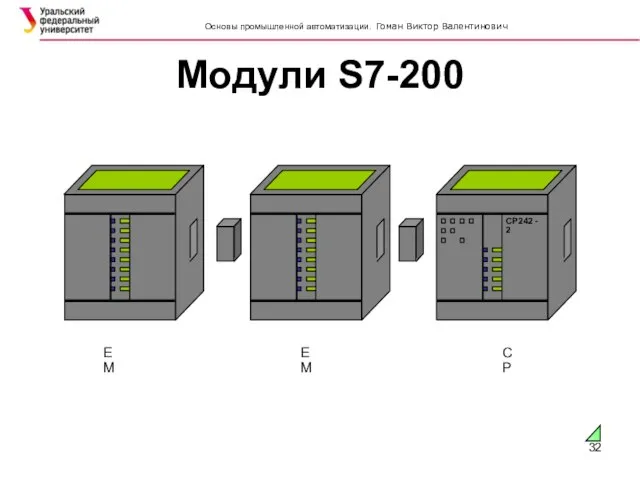
Слайд 32Модули S7-200
EM
Модули S7-200
EM
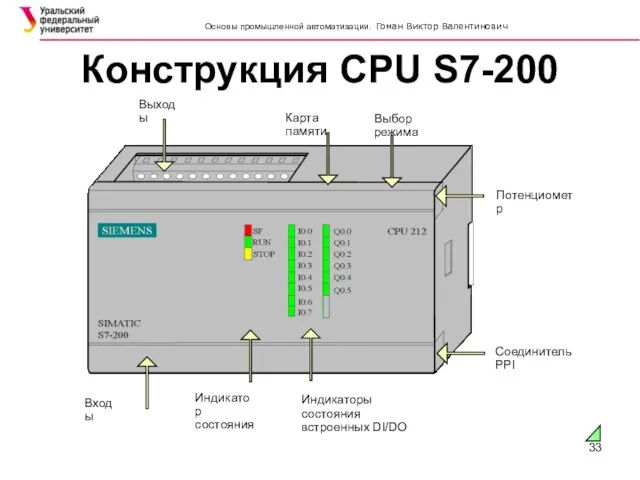
Слайд 33Конструкция CPU S7-200
Конструкция CPU S7-200
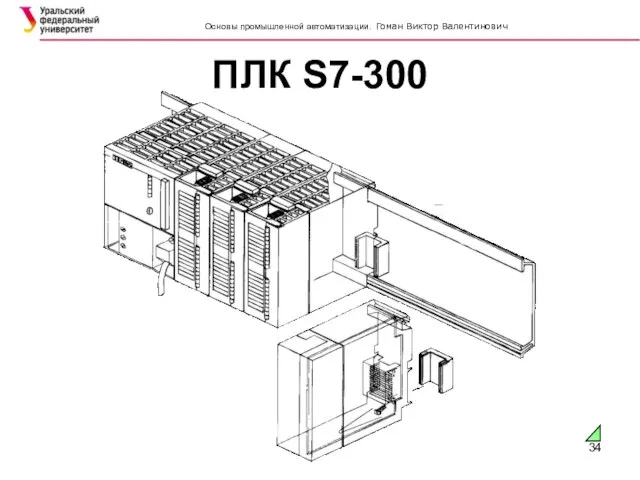
Слайд 34ПЛК S7-300
ПЛК S7-300
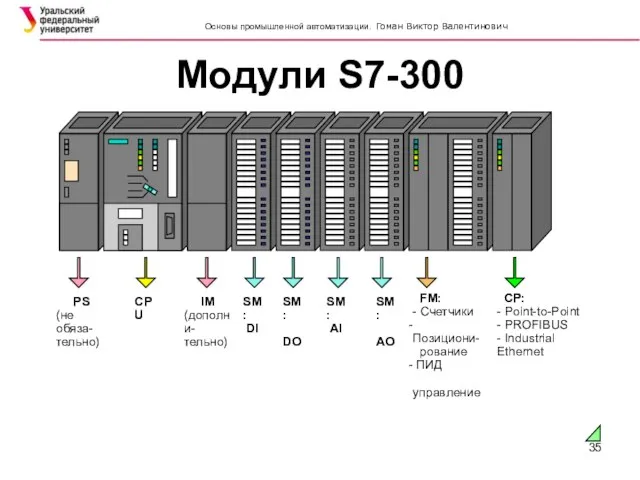
Слайд 35Модули S7-300
PS
(не обяза-
тельно)
Модули S7-300
PS
(не обяза-
тельно)
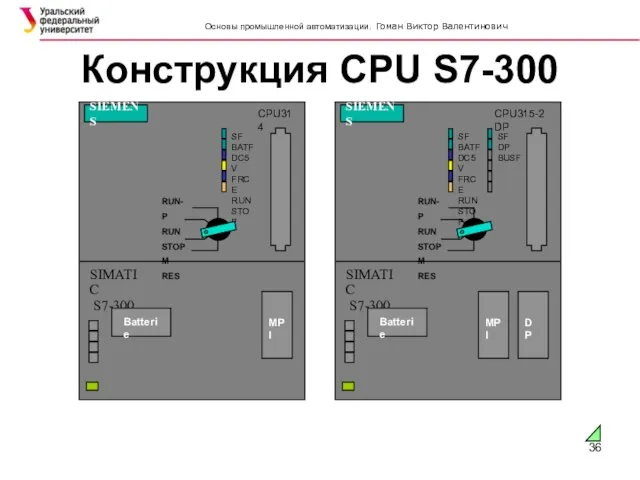
Слайд 36CPU315-2 DP
SIEMENS
RUN-P
RUN
STOP
M RES
SIMATIC
S7-300
Batterie
DP
MPI
SF DP
BUSF
Конструкция CPU S7-300
CPU315-2 DP
SIEMENS
RUN-P
RUN
STOP
M RES
SIMATIC
S7-300
Batterie
DP
MPI
SF DP
BUSF
Конструкция CPU S7-300
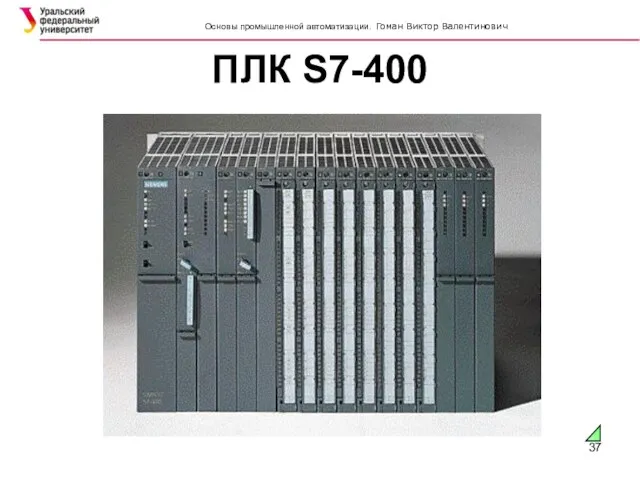
Слайд 37ПЛК S7-400
ПЛК S7-400
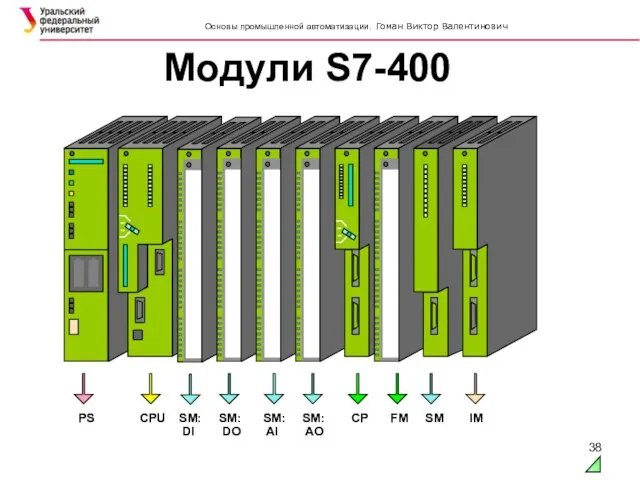
Слайд 38Модули S7-400
PS
Модули S7-400
PS
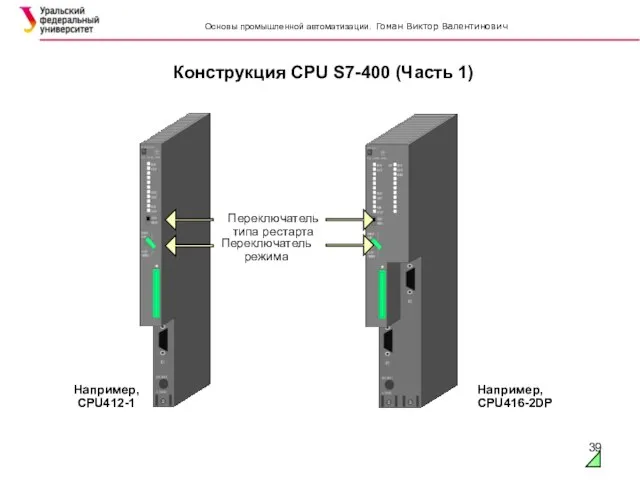
Слайд 39Конструкция CPU S7-400 (Часть 1)
Например,
CPU412-1
Например,
CPU416-2DP
Конструкция CPU S7-400 (Часть 1)
Например,
CPU412-1
Например,
CPU416-2DP
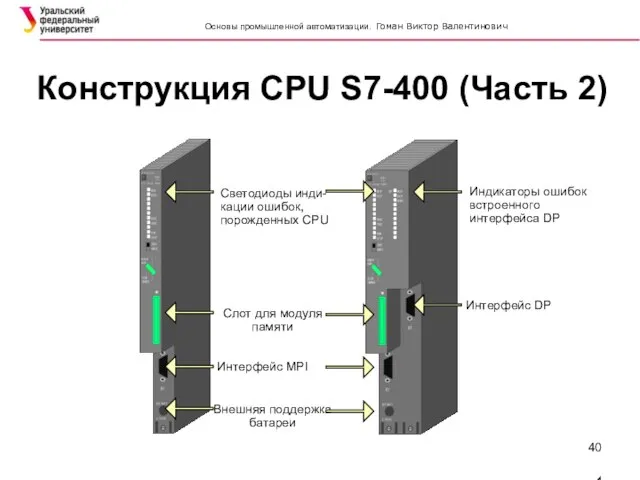
Слайд 40Конструкция CPU S7-400 (Часть 2)
Конструкция CPU S7-400 (Часть 2)
Слайд 41ПЛК S7-1200
ПЛК S7-1200

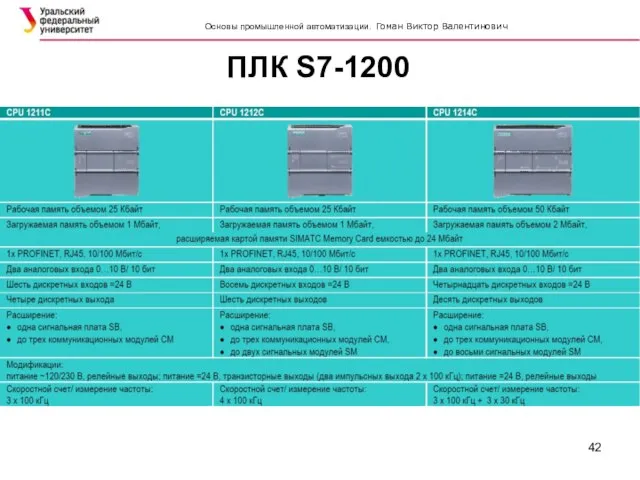
Слайд 42ПЛК S7-1200
ПЛК S7-1200
Слайд 43ПЛК S7-1200
Три типа центральных процессоров различной производительности. Три модификации каждого типа процессора,
ПЛК S7-1200
Три типа центральных процессоров различной производительности. Три модификации каждого типа процессора,
Слайд 44Особенности проектирования систем управления на базе ПЛК
Необходимо оценить необходимость применения ПЛК. Простые
Особенности проектирования систем управления на базе ПЛК
Необходимо оценить необходимость применения ПЛК. Простые
Слайд 45Пример экрана SCADA системы
Пример экрана SCADA системы

Слайд 46Пример экрана SCADA системы
Пример экрана SCADA системы

Слайд 47Основные функции SCADA систем
Основные функции SCADA систем

Слайд 48Датчики систем автоматического управления
Датчик – это преобразователь контролируемой физической величины в сигнал,
Датчики систем автоматического управления
Датчик – это преобразователь контролируемой физической величины в сигнал,
Слайд 49Классификация датчиков
По виду сигнала на выходе:
Генераторный датчик – выдает электрический заряд, напряжение
Классификация датчиков
По виду сигнала на выходе:
Генераторный датчик – выдает электрический заряд, напряжение
Слайд 50Классификация датчиков
По виду сигнала на входе:
Датчики положения, скорости, ускорения и т.д.;
Датчики электрических
Классификация датчиков
По виду сигнала на входе:
Датчики положения, скорости, ускорения и т.д.;
Датчики электрических
Слайд 51Основные типы датчиков и выключателей
по принципу действия
Индуктивный (явление самоиндукции)
Индукционный (явление наведения ЭДС)
Емкостный
Оптический,
Основные типы датчиков и выключателей
по принципу действия
Индуктивный (явление самоиндукции)
Индукционный (явление наведения ЭДС)
Емкостный
Оптический,
Слайд 52Датчики скорости и положения
1. Косвенное измерение скорости (тахометрический мост, измерение через ЭДС
Датчики скорости и положения
1. Косвенное измерение скорости (тахометрический мост, измерение через ЭДС
Слайд 53Инкрементальный энкодер
Инкрементальный энкодер

Слайд 54Инкрементальный энкодер
Инкрементальные энкодеры предназначены для определения скорости вращения валов различных механизмов.
Внутри энкодера
Инкрементальный энкодер
Инкрементальные энкодеры предназначены для определения скорости вращения валов различных механизмов.
Внутри энкодера
Слайд 55Абсолютный энкодер
Абсолютный энкодер

Слайд 56Абсолютный энкодер
Под абсолютными энкодерами подразумевают датчики угла поворота, каждому положению вала которых
Абсолютный энкодер
Под абсолютными энкодерами подразумевают датчики угла поворота, каждому положению вала которых
Слайд 57Энкодеры
Энкодеры

Слайд 58Энкодеры
Энкодеры

Слайд 59Энкодеры
Энкодеры

Слайд 60Энкодеры
Энкодеры

Слайд 61Энкодеры
Энкодеры

Слайд 62Позиционирование
Позиционирование

Слайд 63Позиционирование
Позиционирование

Слайд 64Позиционирование
Позиционирование

Слайд 65Позиционирование
Позиционирование
Слайд 66Позиционирование
Позиционирование

Слайд 67Позиционирование
Позиционирование

Слайд 68Позиционирование
Позиционирование

Слайд 69Позиционирование
Позиционирование

Слайд 70Позиционирование
Позиционирование

Слайд 71Позиционирование
Позиционирование
Слайд 72Позиционирование
Позиционирование

Слайд 73Позиционирование
Позиционирование

Слайд 74Позиционирование
Позиционирование
Слайд 75Позиционирование
Позиционирование

Слайд 76Позиционирование
Позиционирование
Слайд 77Позиционирование
Позиционирование

Слайд 78Позиционирование
Позиционирование

Слайд 79Позиционирование
Позиционирование

Слайд 80Видеосенсоры
Видеосенсоры

Слайд 81Видеосенсоры
Видеосенсоры

Слайд 82Контроллер кулачкового переключателя
Контроллер кулачкового переключателя
Слайд 83Индуктивные датчики и выключатели
Индуктивные бесконтактные выключатели (ВБИ) имеют чувствительный элемент в виде
Индуктивные датчики и выключатели
Индуктивные бесконтактные выключатели (ВБИ) имеют чувствительный элемент в виде
Слайд 84Индуктивные датчики
Индуктивные датчики
Слайд 85Индуктивные датчики
Индуктивные датчики
Слайд 86Индуктивные датчики
Индуктивные датчики

Слайд 87Индуктивные датчики
Индуктивные датчики

Слайд 88Индуктивные датчики
Индуктивные датчики

Слайд 89Индуктивные датчики
Индуктивные датчики

Слайд 90Индуктивные датчики
Индуктивные датчики

Слайд 91Индуктивные датчики
Индуктивные датчики

Слайд 92Индуктивные датчики
Индуктивные датчики

Слайд 93Индуктивные датчики
Индуктивные датчики

Слайд 94Индуктивные датчики
Индуктивные датчики

Слайд 95Индуктивные датчики
Индуктивные датчики

Слайд 96Индуктивные датчики контроля скорости (пример)
Датчик контроля скорости серии ДКС предназначен, в первую
Индуктивные датчики контроля скорости (пример)
Датчик контроля скорости серии ДКС предназначен, в первую

Слайд 97Индуктивные датчики контроля скорости (пример)
Индуктивные датчики контроля скорости (пример)
Слайд 98Индуктивные датчики (пример)
Индуктивные датчики положения с аналоговым выходом преобразуют значение расстояния между
Индуктивные датчики (пример)
Индуктивные датчики положения с аналоговым выходом преобразуют значение расстояния между
Слайд 99Емкостные датчики и выключатели
Емкостные бесконтактные выключатели (ВБЕ) имеют чувствительный элемент в виде
Емкостные датчики и выключатели
Емкостные бесконтактные выключатели (ВБЕ) имеют чувствительный элемент в виде
Слайд 100Емкостные датчики и выключатели
При проектировании размещения ВБЕ неутапливаемого исполнения следует учитывать минимально
Емкостные датчики и выключатели
При проектировании размещения ВБЕ неутапливаемого исполнения следует учитывать минимально
Слайд 101Емкостные датчики и выключатели
Система измерения уровня состоит из емкостного датчика уровня удаленного
Емкостные датчики и выключатели
Система измерения уровня состоит из емкостного датчика уровня удаленного
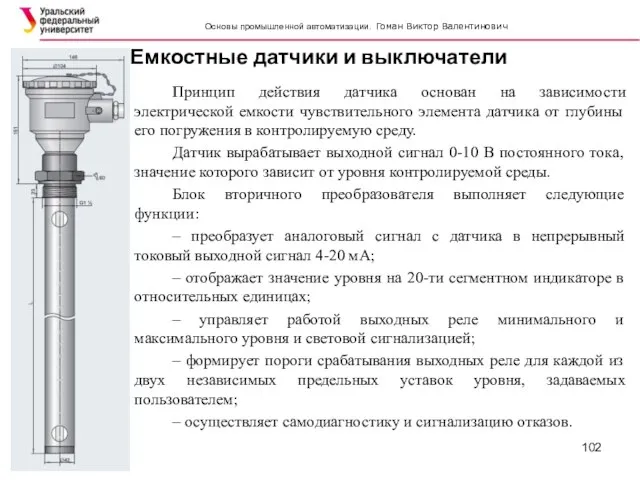
Слайд 102Емкостные датчики и выключатели
Принцип действия датчика основан на зависимости электрической емкости чувствительного
Емкостные датчики и выключатели
Принцип действия датчика основан на зависимости электрической емкости чувствительного
Слайд 103Оптические (фотоэлектрические) датчики и выключатели
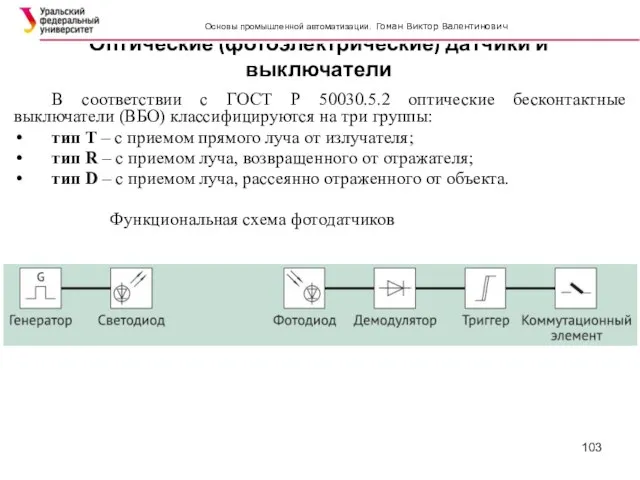
В соответствии с ГОСТ Р 50030.5.2 оптические бесконтактные
Оптические (фотоэлектрические) датчики и выключатели
В соответствии с ГОСТ Р 50030.5.2 оптические бесконтактные
Слайд 104Оптические (фотоэлектрические) датчики и выключатели
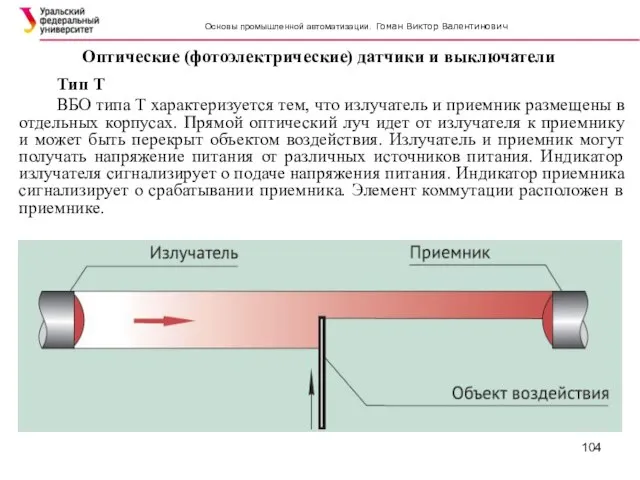
Тип Т
ВБО типа Т характеризуется тем, что излучатель
Оптические (фотоэлектрические) датчики и выключатели
Тип Т
ВБО типа Т характеризуется тем, что излучатель
Слайд 105Оптические (фотоэлектрические) датчики и выключатели
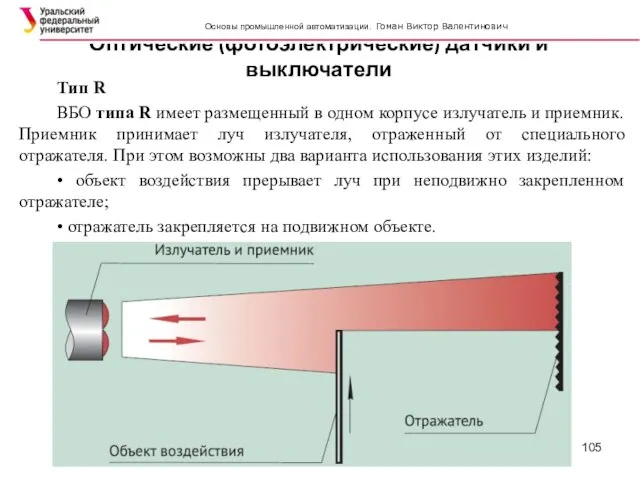
Тип R
ВБО типа R имеет размещенный в одном
Оптические (фотоэлектрические) датчики и выключатели
Тип R
ВБО типа R имеет размещенный в одном
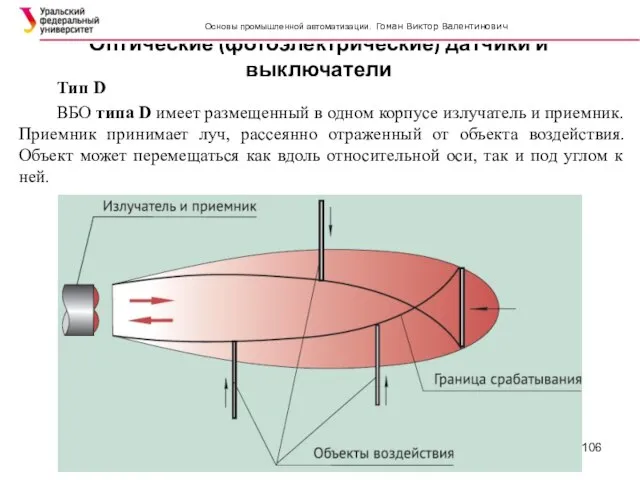
Слайд 106Оптические (фотоэлектрические) датчики и выключатели
Тип D
ВБО типа D имеет размещенный в одном
Оптические (фотоэлектрические) датчики и выключатели
Тип D
ВБО типа D имеет размещенный в одном
Слайд 107Оптические (фотоэлектрические) датчики и выключатели
Особенности эксплуатации ВБО определяются особенностями распространения инфракрасного излучения.
Оптические (фотоэлектрические) датчики и выключатели
Особенности эксплуатации ВБО определяются особенностями распространения инфракрасного излучения.
Слайд 108Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 109Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 110Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 111Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 112Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 113Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 114Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 115Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 116Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели
Слайд 117Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 118Оптические (фотоэлектрические) датчики и выключатели
Оптические (фотоэлектрические) датчики и выключатели

Слайд 119Оптические защитные барьеры
Серия многолучевых оптических защитных барьеров относится к оптическим датчикам типа
Оптические защитные барьеры
Серия многолучевых оптических защитных барьеров относится к оптическим датчикам типа
Слайд 120Оптические защитные барьеры
Наиболее широкое применение он находит в прессовом оборудовании для решения
Оптические защитные барьеры
Наиболее широкое применение он находит в прессовом оборудовании для решения
Слайд 121Оптическая многолучевая линейка
Комплект состоит из многолучевого источника инфракрасного излучения и приемника. Лучи
Оптическая многолучевая линейка
Комплект состоит из многолучевого источника инфракрасного излучения и приемника. Лучи

Слайд 122Оптические датчики метки
Оптические датчики метки применяются в автоматических установках парфюмерной, пищевой, легкой
Оптические датчики метки
Оптические датчики метки применяются в автоматических установках парфюмерной, пищевой, легкой
Слайд 123Оптические датчики метки
Оптические датчики метки

Слайд 124Ультразвуковые датчики
Звук с частотой более чем 16 кГц не воспринимается человеческим слухом.
Ультразвуковые датчики
Звук с частотой более чем 16 кГц не воспринимается человеческим слухом.
Слайд 125Ультразвуковые датчики
Ультразвуковые датчики
Слайд 126Ультразвуковые датчики
Ультразвуковые датчики

Слайд 127Ультразвуковые датчики
Ультразвуковые датчики

Слайд 128Ультразвуковые датчики
Ультразвуковые датчики

Слайд 129Общие рекомендации по выбору и применению датчиков
Выбор при проектировании нового или модернизации
Общие рекомендации по выбору и применению датчиков
Выбор при проектировании нового или модернизации
Слайд 130Выбор по виду воздействующего объекта
Индуктивные датчики срабатывают при приближении объектов из металла.
Выбор по виду воздействующего объекта
Индуктивные датчики срабатывают при приближении объектов из металла.
Слайд 131Выбор по параметрам коммутационного элемента
Электрические параметры коммутационного элемента выключателя выбирают, исходя из
Выбор по параметрам коммутационного элемента
Электрические параметры коммутационного элемента выключателя выбирают, исходя из
 Основные вопросы и задачи формирования электронного правительства в субъектах Российской Федерации
Основные вопросы и задачи формирования электронного правительства в субъектах Российской Федерации Ціннісні орієнтації підлітка
Ціннісні орієнтації підлітка Подведение итогов реализации мероприятий базовыми школами в соответствии с РЦП
Подведение итогов реализации мероприятий базовыми школами в соответствии с РЦП Университетский лицей представляет
Университетский лицей представляет ОЛЕГ САМОЙЛОВ
ОЛЕГ САМОЙЛОВ Пейзажная лирика Ф.И.Тютчева
Пейзажная лирика Ф.И.Тютчева Экология в искусстве
Экология в искусстве Нашествие Персидских войск на Элладу (5 класс)
Нашествие Персидских войск на Элладу (5 класс) Физика и здоровье
Физика и здоровье MTV Upgrade. Статистика
MTV Upgrade. Статистика Взаимодействие детского сада и семьи в процессе социально-нравственного воспитания детей дошкольного возраста.
Взаимодействие детского сада и семьи в процессе социально-нравственного воспитания детей дошкольного возраста. Раскрой цельнокроеного платья
Раскрой цельнокроеного платья Урок – экспедиция в страну «Лексики и Фразеологии»
Урок – экспедиция в страну «Лексики и Фразеологии» Задания для 6 класса
Задания для 6 класса Бетон и железобетон
Бетон и железобетон 7 период развития соц.работы
7 период развития соц.работы Презентация на тему Атмосфера
Презентация на тему Атмосфера  Презентация на тему Живопись Голландии
Презентация на тему Живопись Голландии НОВЫЕ ПОСТУПЛЕНИЯ ЛИТЕРАТУРЫ
НОВЫЕ ПОСТУПЛЕНИЯ ЛИТЕРАТУРЫ ЛОГОПЕДИЧЕСКИЙ МАССАЖ ПРИ РАЗЛИЧНЫХ РЕЧЕВЫХ НАРУШЕНИЯХ
ЛОГОПЕДИЧЕСКИЙ МАССАЖ ПРИ РАЗЛИЧНЫХ РЕЧЕВЫХ НАРУШЕНИЯХ Как накормить акул пера
Как накормить акул пера Бамблби
Бамблби Профессиональная деятельность учителя русского языка и литературы МОУ «Средняя общеобразовательная школа №3 п.Советский» Мухино
Профессиональная деятельность учителя русского языка и литературы МОУ «Средняя общеобразовательная школа №3 п.Советский» Мухино Система профориентации и основные её направления
Система профориентации и основные её направления Презентация продукта
Презентация продукта Презентация на тему Ребенок и право
Презентация на тему Ребенок и право Закон радиоактивного распада
Закон радиоактивного распада