- ПЛОСКА СИСТЕМА ДОВІЛЬНО РОЗМІЩЕНИХ СИЛ

Содержание
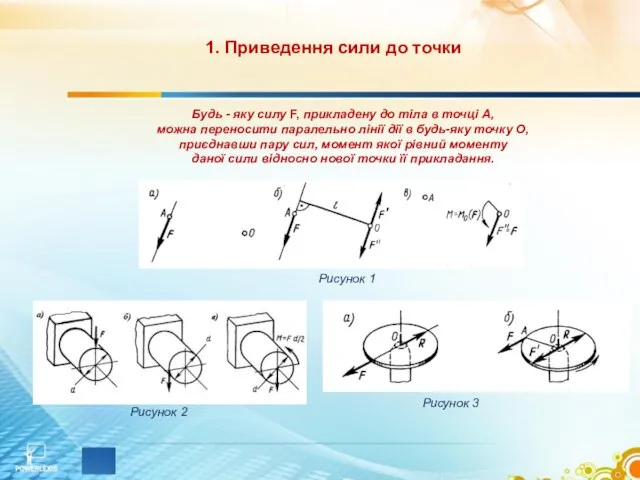
- 2. 1. Приведення сили до точки Будь - яку силу F, прикладену до тіла в точці А,
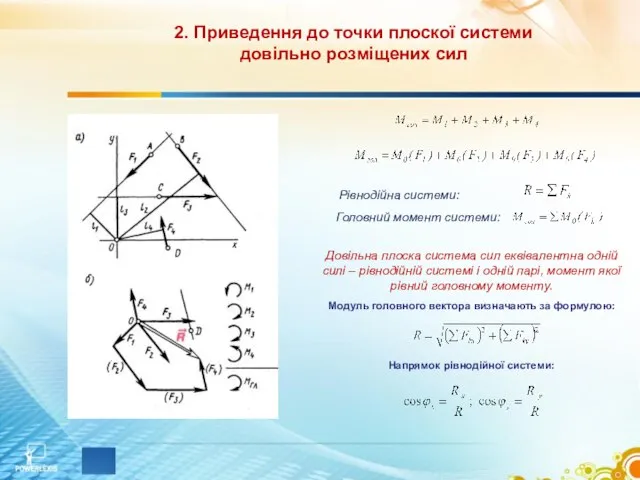
- 3. 2. Приведення до точки плоскої системи довільно розміщених сил Довільна плоска система сил еквівалентна одній силі
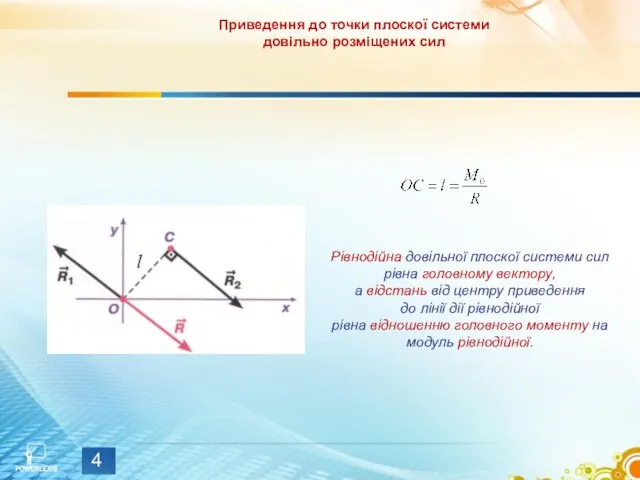
- 4. Рівнодійна довільної плоскої системи сил рівна головному вектору, а відстань від центру приведення до лінії дії
- 5. 3. Теорема Варіньона П'єр Варіньон (1654-1723) - французький математик і механік. У 1725 році в Парижі
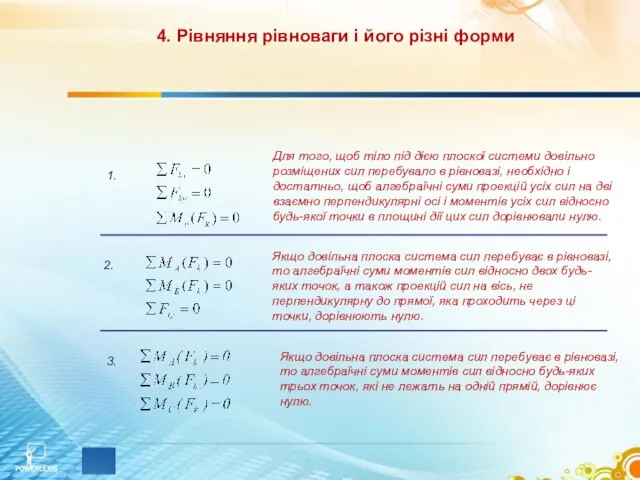
- 6. 4. Рівняння рівноваги і його різні форми 1. 2. 3. Для того, щоб тіло під дією
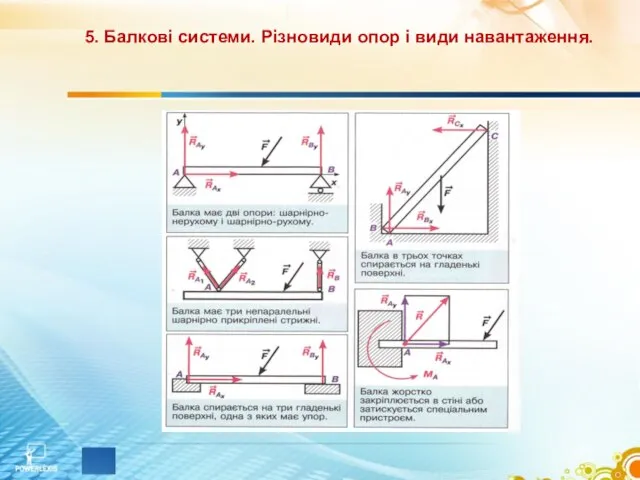
- 7. 5. Балкові системи. Різновиди опор і види навантаження.
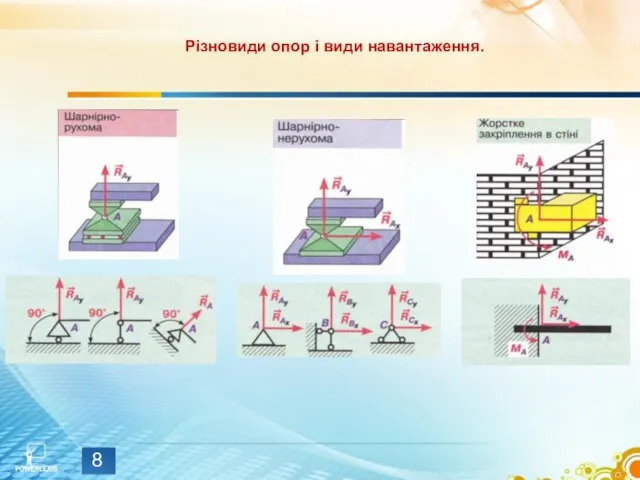
- 8. Різновиди опор і види навантаження.
- 9. Класифікація навантажень
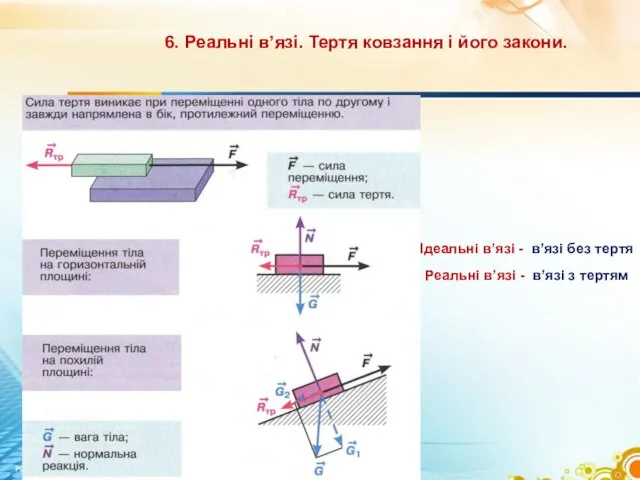
- 10. 6. Реальні в’язі. Тертя ковзання і його закони. Реальні в’язі - в’язі з тертям Ідеальні в’язі
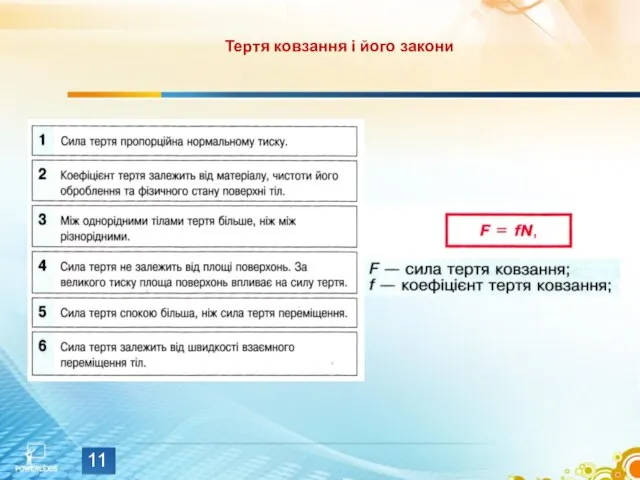
- 11. Тертя ковзання і його закони
- 12. Кут і конус тертя
- 14. Скачать презентацию
Слайд 32. Приведення до точки плоскої системи
довільно розміщених сил
Довільна плоска система сил
2. Приведення до точки плоскої системи
довільно розміщених сил
Довільна плоска система сил
Слайд 4Рівнодійна довільної плоскої системи сил рівна головному вектору,
а відстань від центру
Рівнодійна довільної плоскої системи сил рівна головному вектору,
а відстань від центру
Слайд 53. Теорема Варіньона
П'єр Варіньон (1654-1723) - французький математик і механік.
У 1725 році
3. Теорема Варіньона
П'єр Варіньон (1654-1723) - французький математик і механік.
У 1725 році
Слайд 64. Рівняння рівноваги і його різні форми
1.
2.
3.
Для того, щоб тіло під дією
4. Рівняння рівноваги і його різні форми
1.
2.
3.
Для того, щоб тіло під дією
Слайд 75. Балкові системи. Різновиди опор і види навантаження.
5. Балкові системи. Різновиди опор і види навантаження.
Слайд 8Різновиди опор і види навантаження.
Різновиди опор і види навантаження.
Слайд 9Класифікація навантажень
Класифікація навантажень

Слайд 106. Реальні в’язі. Тертя ковзання і його закони.
Реальні в’язі - в’язі з
6. Реальні в’язі. Тертя ковзання і його закони.
Реальні в’язі - в’язі з
Слайд 11Тертя ковзання і його закони
Тертя ковзання і його закони
Слайд 12Кут і конус тертя
Кут і конус тертя

 Национальные парки Африки
Национальные парки Африки Исәнмесез! Хәерле көн! Көнегез уңышлы үтсен!
Исәнмесез! Хәерле көн! Көнегез уңышлы үтсен! Равнобедренный треугольник
Равнобедренный треугольник Модели смертности
Модели смертности Стандарты обслуживания КЦ
Стандарты обслуживания КЦ Регламент исполнения процессов
Регламент исполнения процессов Презентация на тему Класс Птицы
Презентация на тему Класс Птицы О реализации электронного межведомственного взаимодействия в Российской Федерации
О реализации электронного межведомственного взаимодействия в Российской Федерации ИСТОРИЯ НАШЕГО КЛАССА
ИСТОРИЯ НАШЕГО КЛАССА Праздник воды и огня. Традиции
Праздник воды и огня. Традиции Решение задач на смеси, сплавы, растворы
Решение задач на смеси, сплавы, растворы Финансовая структура и распределение финансовой ответственности
Финансовая структура и распределение финансовой ответственности Морской кадетской школы имени адмирала Котова П.Г
Морской кадетской школы имени адмирала Котова П.Г Сфера духовной жизни общества
Сфера духовной жизни общества Женщины на государственной службе
Женщины на государственной службе Профессиональный портрет в домашних условиях
Профессиональный портрет в домашних условиях Аудитория Уанетадекабрь 2009 г.
Аудитория Уанетадекабрь 2009 г. Аппетитное радио
Аппетитное радио Псалом 38. Вечнозаветная псалтирь
Псалом 38. Вечнозаветная псалтирь WIndows XP Professional
WIndows XP Professional Who helped Morse develop the code
Who helped Morse develop the code Человек и информационное общество
Человек и информационное общество Как сделать уроки биологии любимыми? Маруся
Как сделать уроки биологии любимыми? Маруся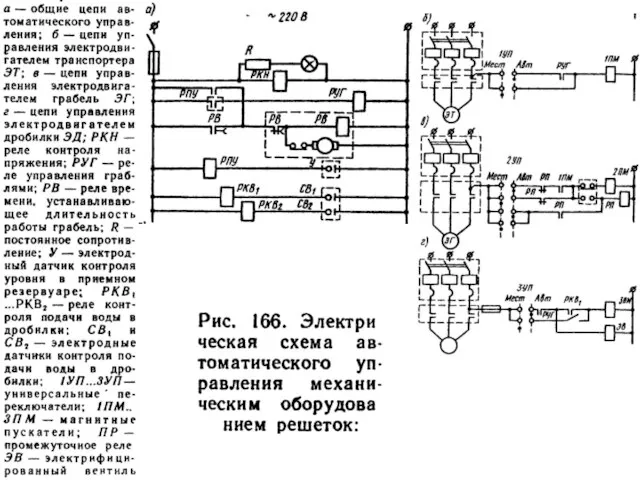 Автоматизация
Автоматизация Презентация на тему Пейзаж и его разновидности
Презентация на тему Пейзаж и его разновидности Сибирский университет Якутский филиал потребительской кооперации.
Сибирский университет Якутский филиал потребительской кооперации. Актаныш
Актаныш Обкатка машин. Окрашивание
Обкатка машин. Окрашивание