- Презентация на тему Модели в механике. Система отчета.Траектория. Длина пути

Содержание
- 2. Механика делится на три раздела.. Кинематика изучает движение тел, не рассматривая причины, которые это движение обуславливают.
- 3. Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Понятие
- 4. Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие между собой части, каждая
- 5. Абсолютным твердым телом называется тело, которое ни при каких условиях не может дефор- мироваться и при
- 6. Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат
- 7. Движение тел происходит в пространстве и во времени. Поэтому для описания движения материаль-ной точки надо знать,
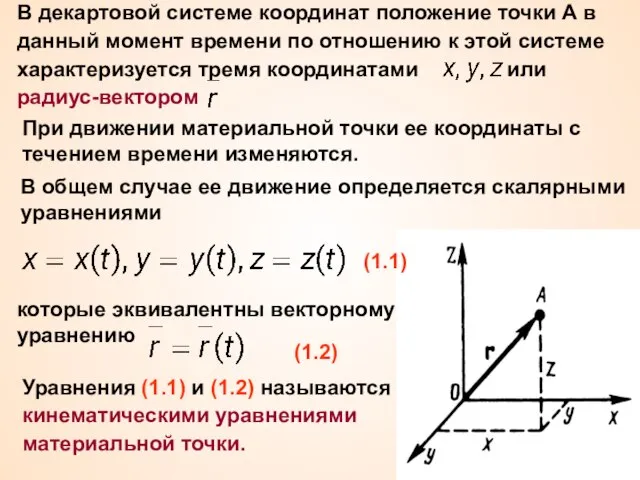
- 8. В декартовой системе координат положение точки А в данный момент времени по отношению к этой системе
- 9. Число независимых координат, полностью определяю- щих положение точки в пространстве, называется числом степеней свободы. Если материальная
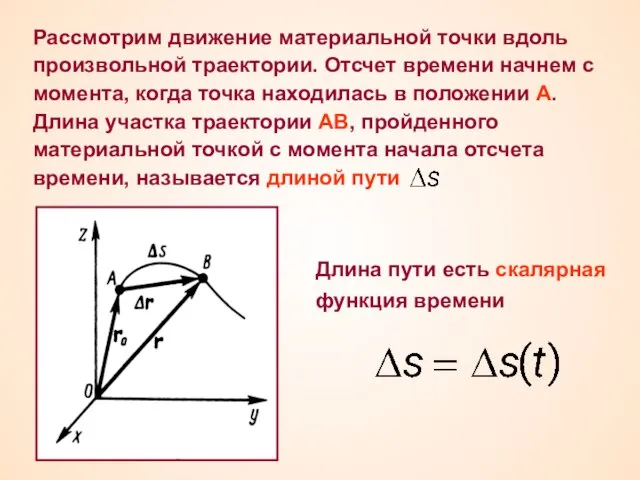
- 10. Рассмотрим движение материальной точки вдоль произвольной траектории. Отсчет времени начнем с момента, когда точка находилась в
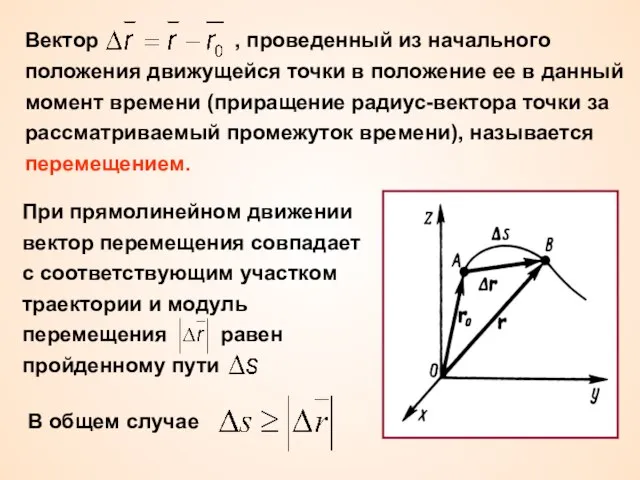
- 11. Вектор , проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение
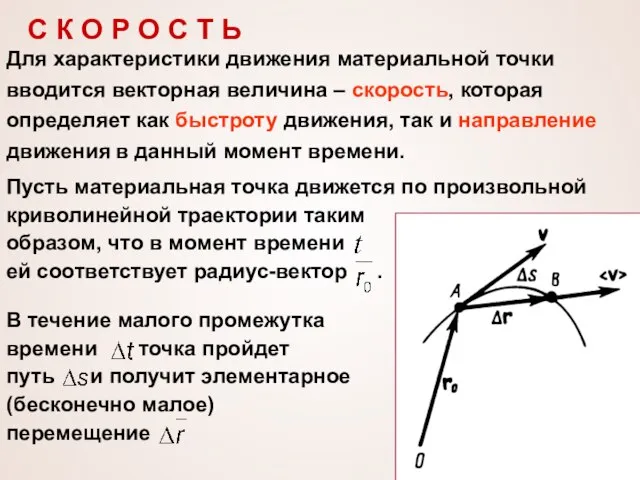
- 12. С К О Р О С Т Ь Для характеристики движения материальной точки вводится векторная величина
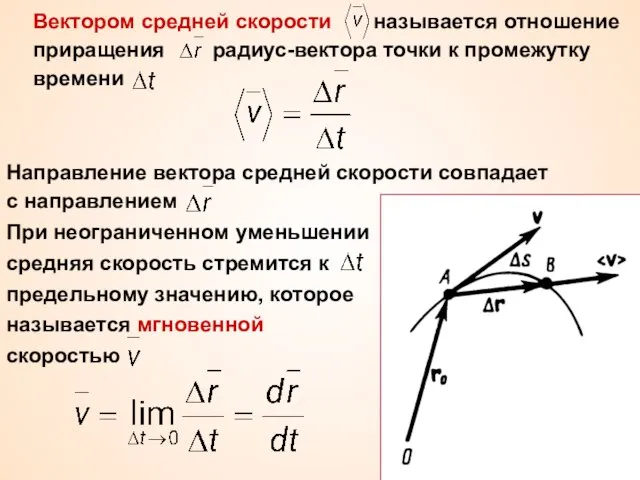
- 13. Вектором средней скорости называется отношение приращения радиус-вектора точки к промежутку времени Направление вектора средней скорости совпадает
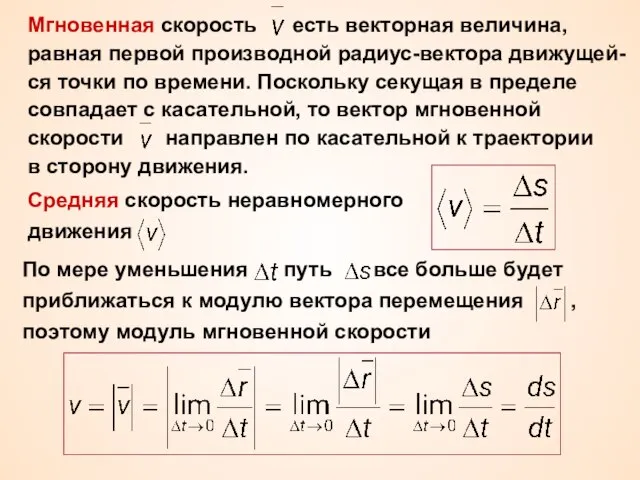
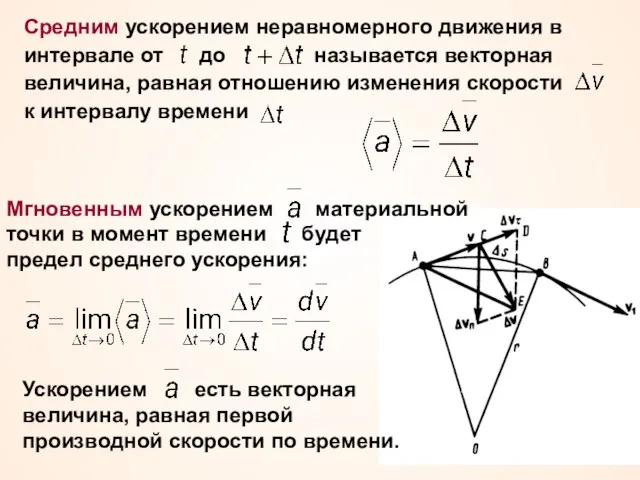
- 14. Мгновенная скорость есть векторная величина, равная первой производной радиус-вектора движущей- ся точки по времени. Поскольку секущая
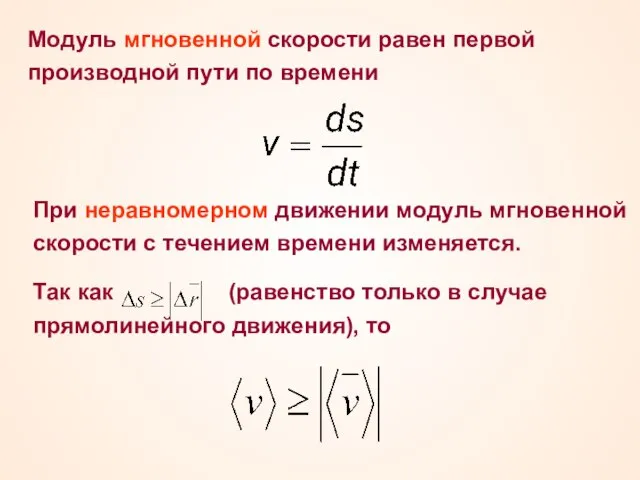
- 15. Модуль мгновенной скорости равен первой производной пути по времени При неравномерном движении модуль мгновенной скорости с
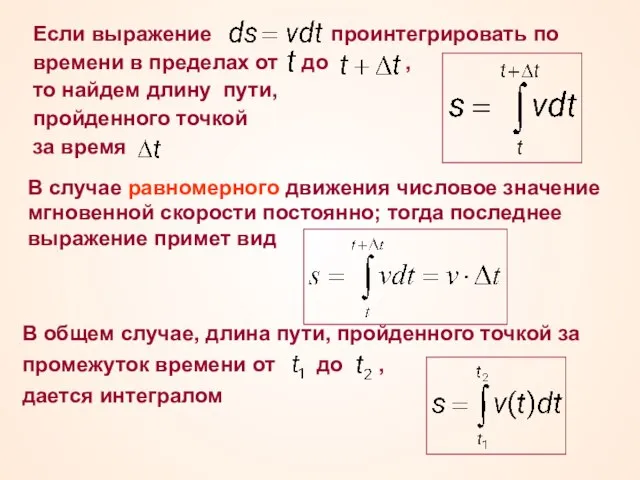
- 16. Если выражение проинтегрировать по времени в пределах от до , то найдем длину пути, пройденного точкой
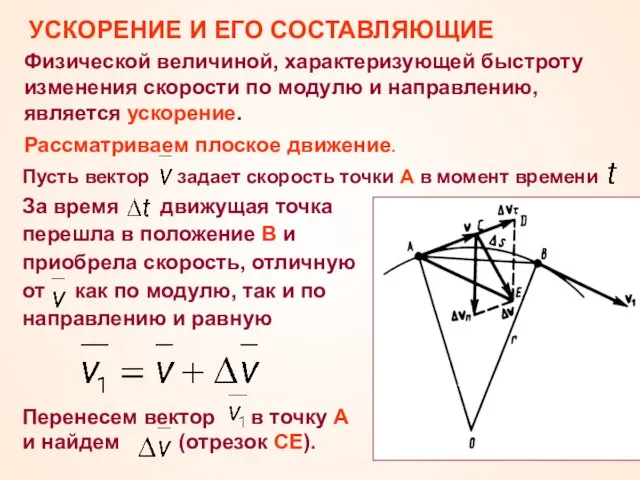
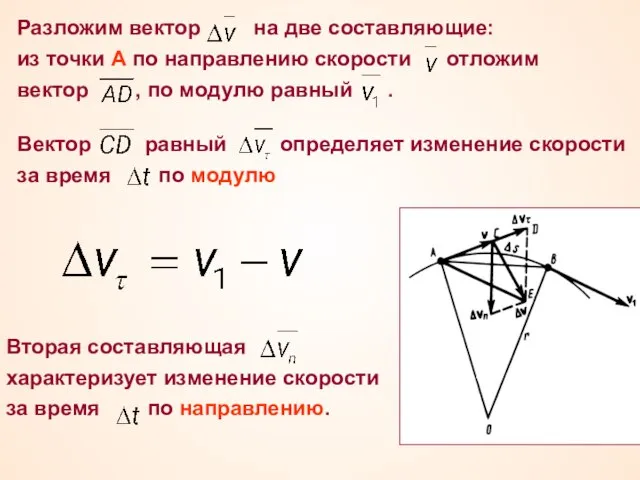
- 17. За время движущая точка перешла в положение В и приобрела скорость, отличную от как по модулю,
- 18. Средним ускорением неравномерного движения в интервале от до называется векторная величина, равная отношению изменения скорости к
- 19. Разложим вектор на две составляющие: из точки А по направлению скорости отложим вектор , по модулю
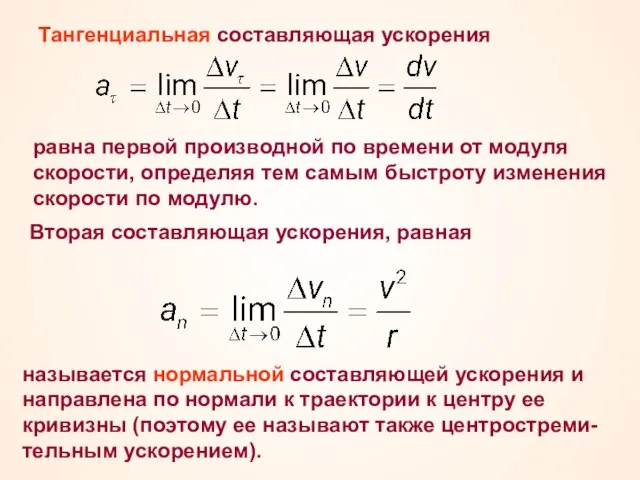
- 20. Тангенциальная составляющая ускорения равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения
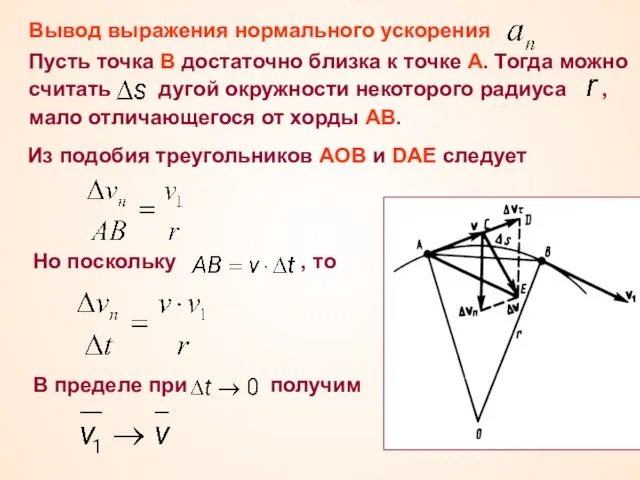
- 21. Вывод выражения нормального ускорения Пусть точка В достаточно близка к точке А. Тогда можно считать дугой
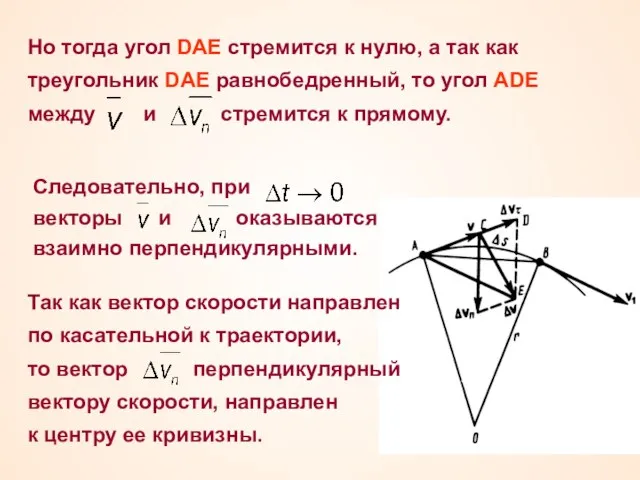
- 22. Следовательно, при векторы и оказываются взаимно перпендикулярными. Но тогда угол DAE стремится к нулю, а так
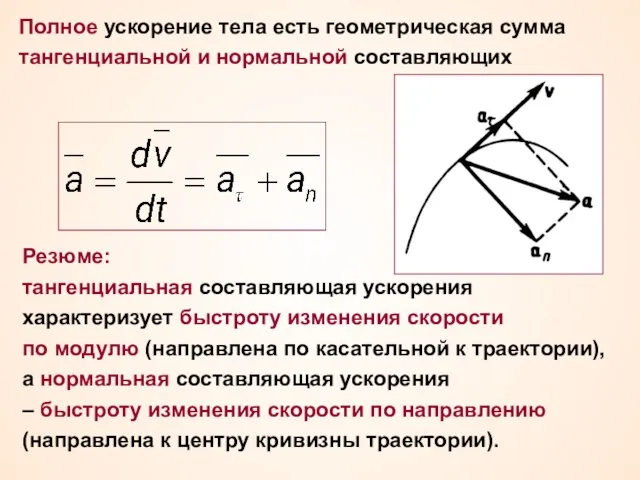
- 23. Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих Резюме: тангенциальная составляющая ускорения характеризует быстроту
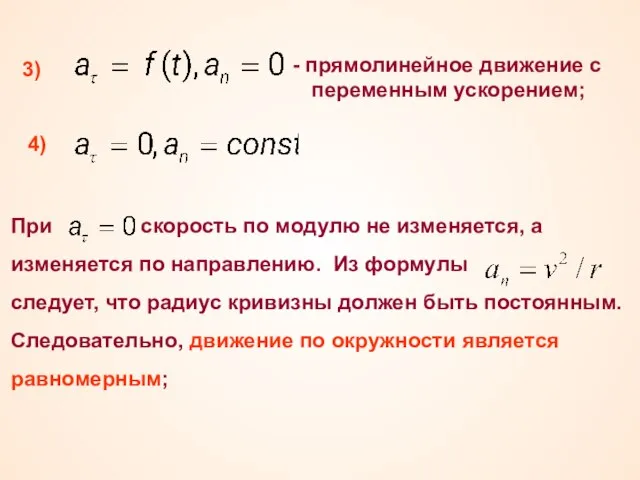
- 24. В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом: 1) прямолинейное равномерное
- 25. 2) прямолинейное равнопеременное движение; Напомним, что Если начальный момент времени , а начальная скорость , то
- 26. 4) При скорость по модулю не изменяется, а изменяется по направлению. Из формулы следует, что радиус
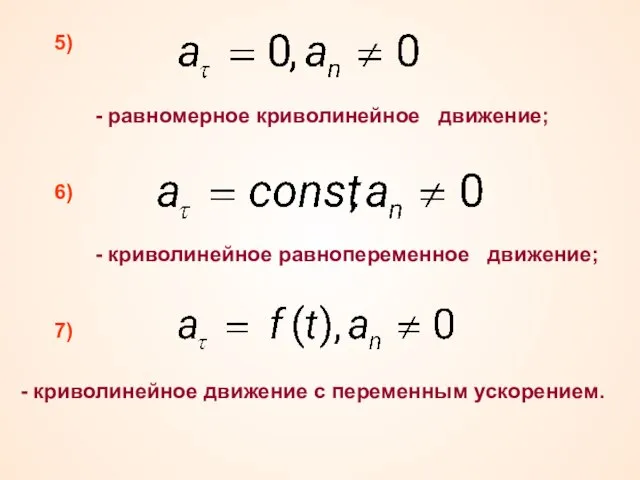
- 27. 5) равномерное криволинейное движение; 7) 6) криволинейное равнопеременное движение; криволинейное движение с переменным ускорением.
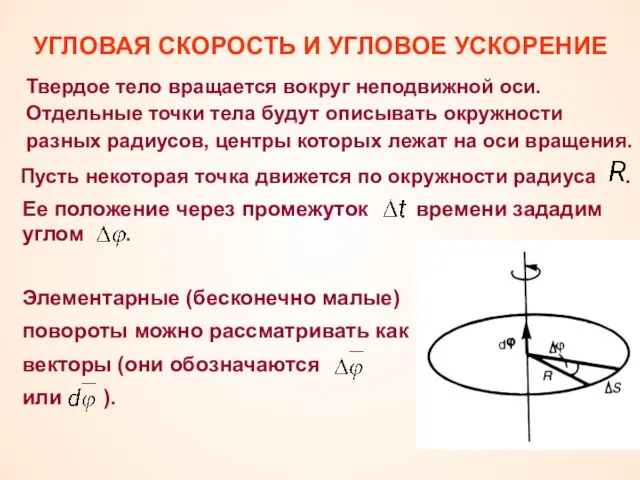
- 28. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ Твердое тело вращается вокруг неподвижной оси. Отдельные точки тела будут описывать
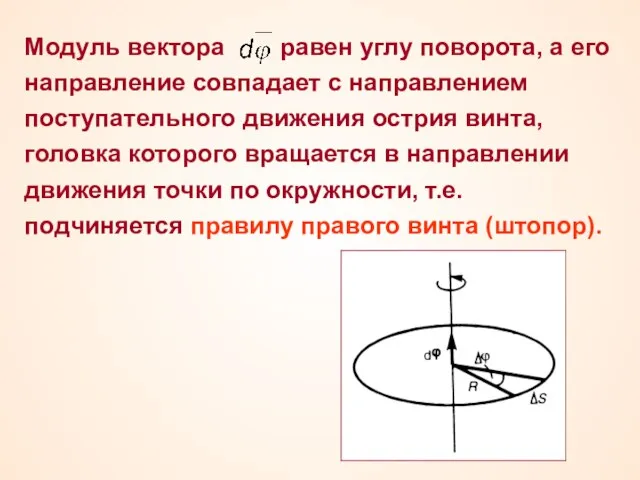
- 29. Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка
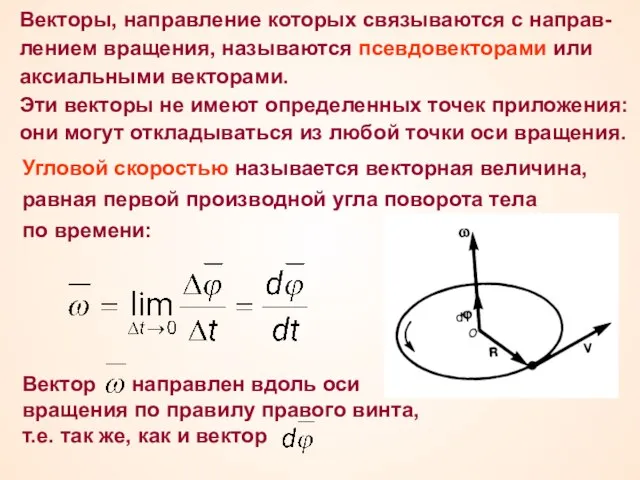
- 30. Векторы, направление которых связываются с направ- лением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не
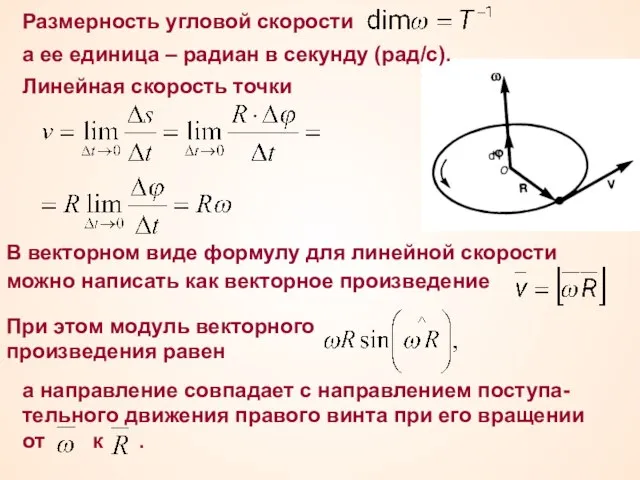
- 31. Размерность угловой скорости а ее единица – радиан в секунду (рад/с). Линейная скорость точки В векторном
- 32. Если , то вращение равномерное и его можно характеризовать периодом вращения . Это время, за которое
- 33. Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени: При вращении тела вокруг
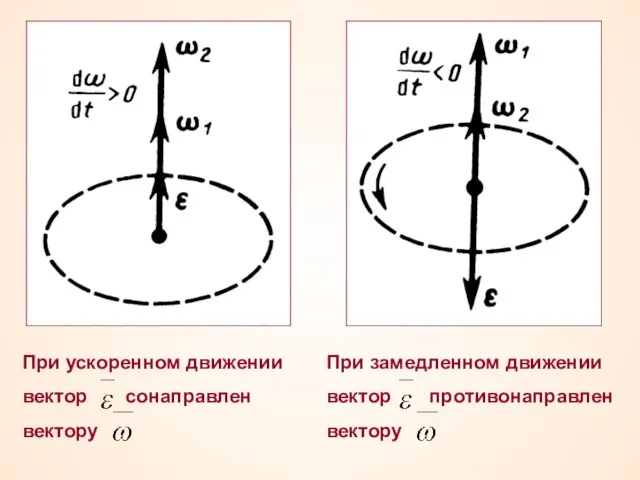
- 34. При ускоренном движении вектор сонаправлен вектору При замедленном движении вектор противонаправлен вектору
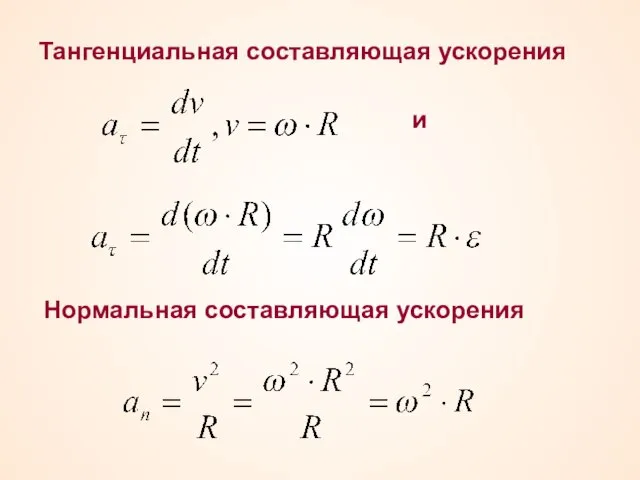
- 35. Тангенциальная составляющая ускорения и Нормальная составляющая ускорения
- 37. Скачать презентацию
Слайд 2Механика делится на три раздела..
Кинематика изучает движение тел, не рассматривая
причины, которые
Механика делится на три раздела..
Кинематика изучает движение тел, не рассматривая
причины, которые
Слайд 3Механика для описания движения тел в зависимости от условий конкретных задач использует
Механика для описания движения тел в зависимости от условий конкретных задач использует
Слайд 4Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие
Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые взаимодействующие
Слайд 5Абсолютным твердым телом называется тело,
которое ни при каких условиях не может
Абсолютным твердым телом называется тело,
которое ни при каких условиях не может
Слайд 6Вращательное движение – это движение, при
котором все точки тела движутся по
Вращательное движение – это движение, при
котором все точки тела движутся по
Слайд 7Движение тел происходит в пространстве и во времени. Поэтому для описания движения
Движение тел происходит в пространстве и во времени. Поэтому для описания движения
Слайд 8В декартовой системе координат положение точки А в
данный момент времени по
В декартовой системе координат положение точки А в
данный момент времени по
Слайд 9Число независимых координат, полностью определяю-
щих положение точки в пространстве, называется
числом степеней свободы.
Число независимых координат, полностью определяю-
щих положение точки в пространстве, называется
числом степеней свободы.
Слайд 10Рассмотрим движение материальной точки вдоль
произвольной траектории. Отсчет времени начнем с
момента, когда точка
Рассмотрим движение материальной точки вдоль
произвольной траектории. Отсчет времени начнем с
момента, когда точка
Слайд 11Вектор , проведенный из начального
положения движущейся точки в положение ее в
Вектор , проведенный из начального
положения движущейся точки в положение ее в
Слайд 12С К О Р О С Т Ь
Для характеристики движения материальной
С К О Р О С Т Ь
Для характеристики движения материальной
Слайд 13Вектором средней скорости называется отношение
приращения радиус-вектора точки к промежутку
времени
Направление вектора
Вектором средней скорости называется отношение
приращения радиус-вектора точки к промежутку
времени
Направление вектора
Слайд 14Мгновенная скорость есть векторная величина,
равная первой производной радиус-вектора движущей-
ся точки по
Мгновенная скорость есть векторная величина,
равная первой производной радиус-вектора движущей-
ся точки по
Слайд 15Модуль мгновенной скорости равен первой
производной пути по времени
При неравномерном движении модуль
Модуль мгновенной скорости равен первой
производной пути по времени
При неравномерном движении модуль
Слайд 16Если выражение проинтегрировать по
времени в пределах от до ,
то найдем длину
Если выражение проинтегрировать по
времени в пределах от до ,
то найдем длину
Слайд 17За время движущая точка
перешла в положение В и
приобрела скорость, отличную
За время движущая точка
перешла в положение В и
приобрела скорость, отличную
Слайд 18Средним ускорением неравномерного движения в
интервале от до называется векторная
величина, равная
Средним ускорением неравномерного движения в
интервале от до называется векторная
величина, равная
Слайд 19Разложим вектор на две составляющие:
из точки А по направлению скорости отложим
Разложим вектор на две составляющие:
из точки А по направлению скорости отложим
Слайд 20Тангенциальная составляющая ускорения
равна первой производной по времени от модуля
скорости, определяя тем
Тангенциальная составляющая ускорения
равна первой производной по времени от модуля
скорости, определяя тем
Слайд 21Вывод выражения нормального ускорения
Пусть точка В достаточно близка к точке А. Тогда
Вывод выражения нормального ускорения
Пусть точка В достаточно близка к точке А. Тогда
Слайд 22Следовательно, при
векторы и оказываются
взаимно перпендикулярными.
Но тогда угол DAE стремится к нулю,
Следовательно, при
векторы и оказываются
взаимно перпендикулярными.
Но тогда угол DAE стремится к нулю,
Слайд 23Полное ускорение тела есть геометрическая сумма
тангенциальной и нормальной составляющих
Резюме:
тангенциальная составляющая ускорения
характеризует
Полное ускорение тела есть геометрическая сумма
тангенциальной и нормальной составляющих
Резюме:
тангенциальная составляющая ускорения
характеризует
Слайд 24В зависимости от тангенциальной и нормальной
составляющих ускорения движение можно
классифицировать следующим
В зависимости от тангенциальной и нормальной
составляющих ускорения движение можно
классифицировать следующим
Слайд 252)
прямолинейное
равнопеременное движение;
Напомним, что
Если начальный момент времени , а начальная
2)
прямолинейное
равнопеременное движение;
Напомним, что
Если начальный момент времени , а начальная
Слайд 264)
При скорость по модулю не изменяется, а
изменяется по направлению. Из формулы
4)
При скорость по модулю не изменяется, а
изменяется по направлению. Из формулы
Слайд 275)
равномерное криволинейное движение;
7)
6)
криволинейное равнопеременное движение;
криволинейное движение с переменным ускорением.
5)
равномерное криволинейное движение;
7)
6)
криволинейное равнопеременное движение;
криволинейное движение с переменным ускорением.
Слайд 28УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
Твердое тело вращается вокруг неподвижной оси.
Отдельные точки
УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
Твердое тело вращается вокруг неподвижной оси.
Отдельные точки
Слайд 29Модуль вектора равен углу поворота, а его направление совпадает с направлением
поступательного
Модуль вектора равен углу поворота, а его направление совпадает с направлением
поступательного
Слайд 30Векторы, направление которых связываются с направ-
лением вращения, называются псевдовекторами или
аксиальными векторами.
Эти
Векторы, направление которых связываются с направ-
лением вращения, называются псевдовекторами или
аксиальными векторами.
Эти
Слайд 31Размерность угловой скорости
а ее единица – радиан в секунду (рад/с).
Линейная скорость
Размерность угловой скорости
а ее единица – радиан в секунду (рад/с).
Линейная скорость
Слайд 32Если , то вращение равномерное и его
можно характеризовать периодом вращения .
Это
Если , то вращение равномерное и его
можно характеризовать периодом вращения .
Это
Слайд 33Угловым ускорением называется векторная величина,
равная первой производной угловой скорости
по времени:
Угловым ускорением называется векторная величина,
равная первой производной угловой скорости
по времени:
Слайд 34При ускоренном движении
вектор сонаправлен
вектору
При замедленном движении
вектор противонаправлен
вектору
При ускоренном движении
вектор сонаправлен
вектору
При замедленном движении
вектор противонаправлен
вектору
Слайд 35Тангенциальная составляющая ускорения
и
Нормальная составляющая ускорения
Тангенциальная составляющая ускорения
и
Нормальная составляющая ускорения
 London
London Основы менеджмента
Основы менеджмента Кто покупает? Портрет вашего клиента
Кто покупает? Портрет вашего клиента Презентация на тему Непрерывные случайные величины
Презентация на тему Непрерывные случайные величины  Урок-путешествие
Урок-путешествие Экспортная Интернет площадка www.exim.uz
Экспортная Интернет площадка www.exim.uz Неправительственные правозащитные организации
Неправительственные правозащитные организации Презентация на тему Строение и функции белков
Презентация на тему Строение и функции белков  Инвестиционные программы Gold Fort
Инвестиционные программы Gold Fort Артюхова Нина Михайловна — русская детская писательница
Артюхова Нина Михайловна — русская детская писательница Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке
Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке Продажа земельных участков. Республика Крым
Продажа земельных участков. Республика Крым Презентация на тему Ромео и Джульетта
Презентация на тему Ромео и Джульетта Филогенетический и онтогенетический методы развития психики живых существ
Филогенетический и онтогенетический методы развития психики живых существ Место проведения экспедиции
Место проведения экспедиции project-presentation-template
project-presentation-template Медиаобразованиев России www.edu.of.ru/mediaeducation
Медиаобразованиев России www.edu.of.ru/mediaeducation Тема: Правописание частиц НЕ и НИ.
Тема: Правописание частиц НЕ и НИ. Чек-лист для InGame (детали)
Чек-лист для InGame (детали) Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977
Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977  Исследование как основа и как инструмент продвижения регионов
Исследование как основа и как инструмент продвижения регионов Мир на рубеже веков
Мир на рубеже веков Решение задач (Практическое пособие)
Решение задач (Практическое пособие) Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В.
Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В. Элемент архитектуры портал
Элемент архитектуры портал Переніс слві
Переніс слві Задание по дисциплине Маркетинговые стратегии
Задание по дисциплине Маркетинговые стратегии Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов
Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов