- Синхронные машины. Раздел 4

Содержание
- 2. 4.1. Устройство и принцип действия Синхронными называют электрические машины, в которых ротор вращается с той же
- 3. 4.1. Устройство и принцип действия Статор СМ точно такой же, как у асинхронных машин, представляет собой
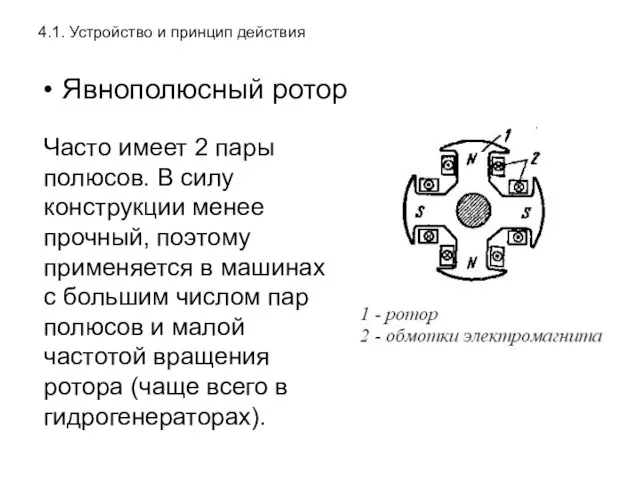
- 4. 4.1. Устройство и принцип действия Явнополюсный ротор Часто имеет 2 пары полюсов. В силу конструкции менее
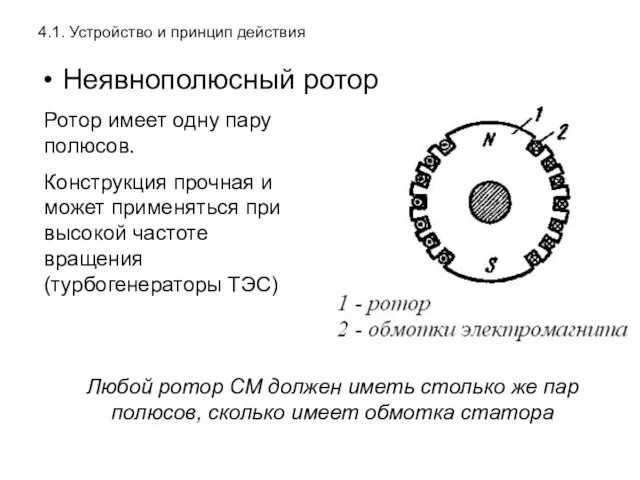
- 5. 4.1. Устройство и принцип действия Неявнополюсный ротор Ротор имеет одну пару полюсов. Конструкция прочная и может
- 6. 4.1. Устройство и принцип действия Принцип действия СГ. Приведем ротор СГ во вращение и подключим к
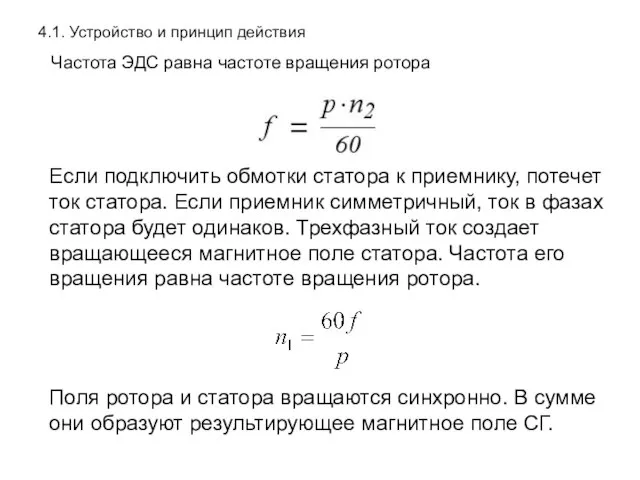
- 7. 4.1. Устройство и принцип действия Частота ЭДС равна частоте вращения ротора Если подключить обмотки статора к
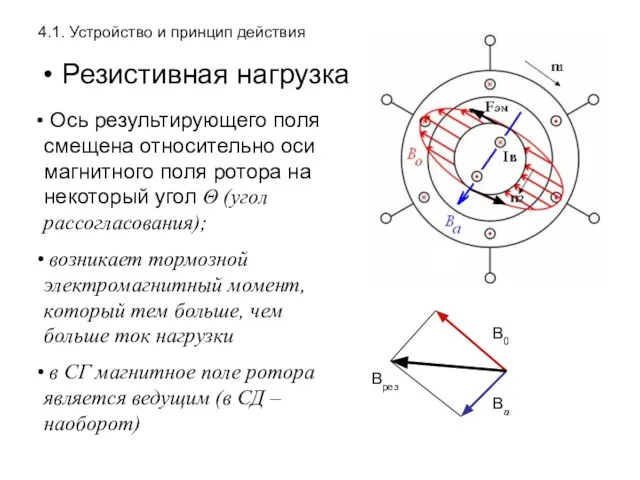
- 8. 4.1. Устройство и принцип действия Резистивная нагрузка В0 Bа Врез Ось результирующего поля смещена относительно оси
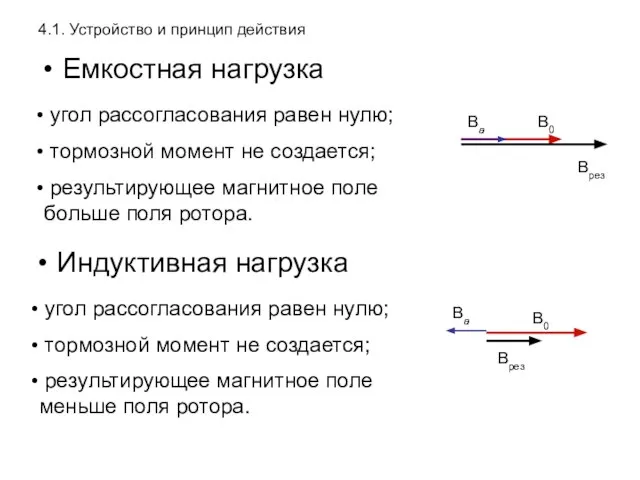
- 9. 4.1. Устройство и принцип действия Емкостная нагрузка В0 Bа Врез угол рассогласования равен нулю; тормозной момент
- 10. Активно-реактивная нагрузка В0 Bа Врез Активно-емкостная Активно-индуктивная активная Врез Врез Тормозящий момент СГ зависит от величины
- 11. 4.1. Устройство и принцип действия Выводы: При подключении нагрузки изменяется магнитное поле СГ. Чем больше активная
- 12. 4.1. Устройство и принцип действия Принцип действия СД Статор подключается в трехфазной сети, т.о. создается вращающееся
- 13. 4.1. Устройство и принцип действия СД автоматически создает момент вращения, равный моменту сопротивления; Чем больше момент
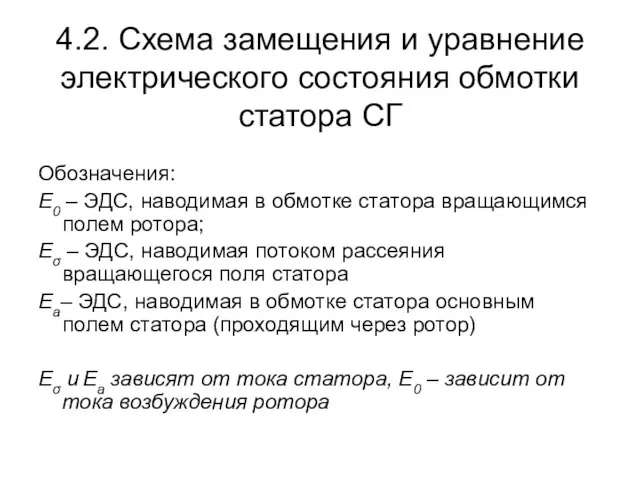
- 14. 4.2. Схема замещения и уравнение электрического состояния обмотки статора СГ Обозначения: Е0 – ЭДС, наводимая в
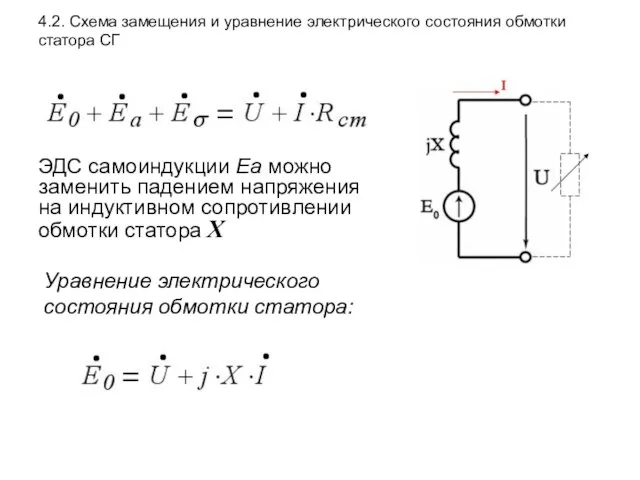
- 15. 4.2. Схема замещения и уравнение электрического состояния обмотки статора СГ ЭДС самоиндукции Еа можно заменить падением
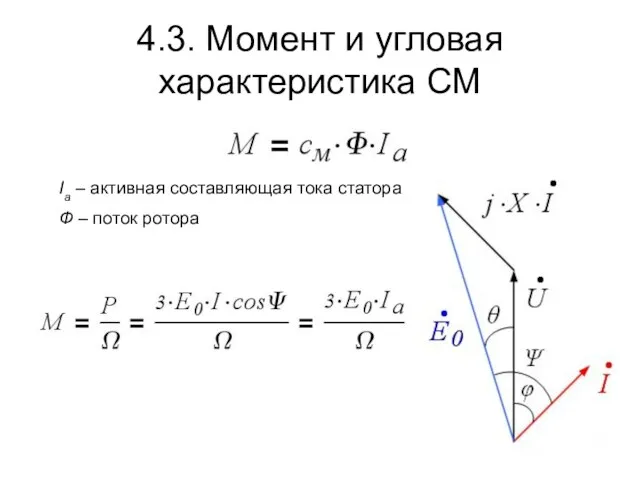
- 16. 4.3. Момент и угловая характеристика СМ Ia – активная составляющая тока статора Ф – поток ротора
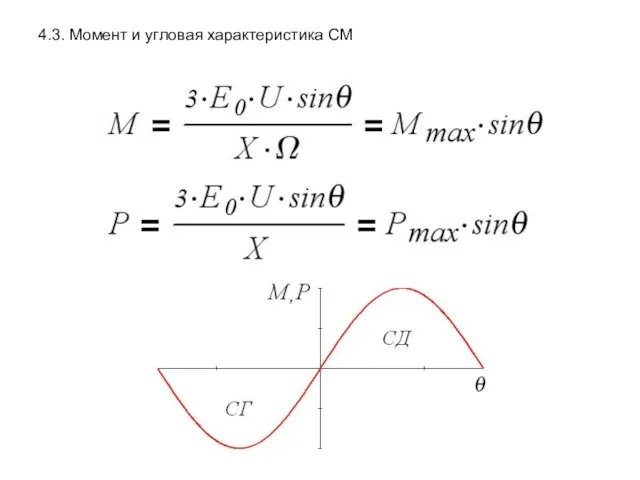
- 17. 4.3. Момент и угловая характеристика СМ
- 18. Работа СГ в мощной энергосистеме 4.4. Мощная энергосистема Энергосистема – это множество электрических станций и потребителей,
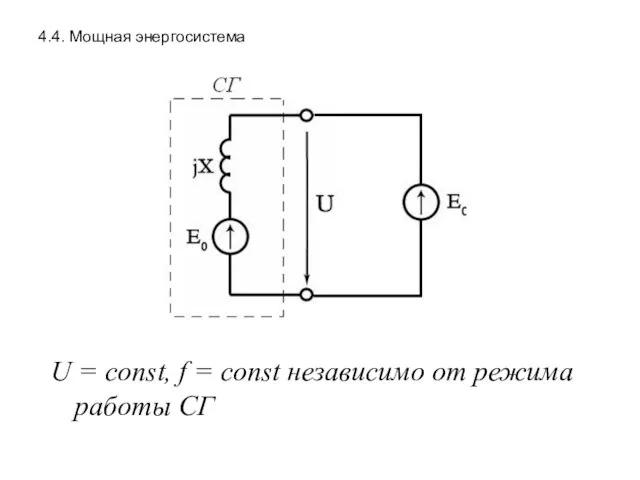
- 19. 4.4. Мощная энергосистема U = const, f = const независимо от режима работы СГ
- 20. 4.5. Включение СГ на параллельную работу с сетью При включении генератора в энергосистему не должно возникать
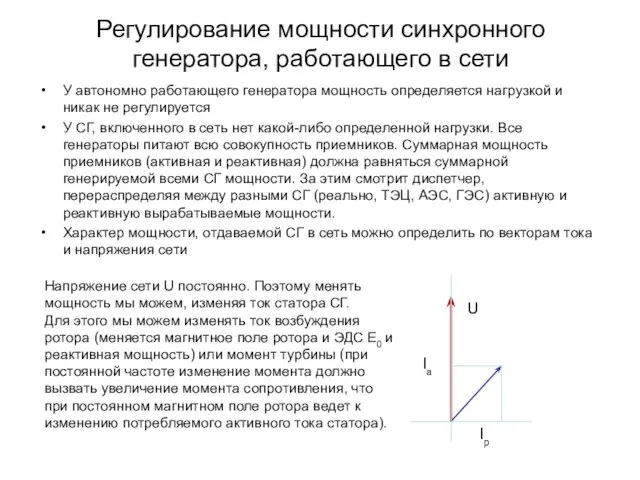
- 21. Регулирование мощности синхронного генератора, работающего в сети У автономно работающего генератора мощность определяется нагрузкой и никак
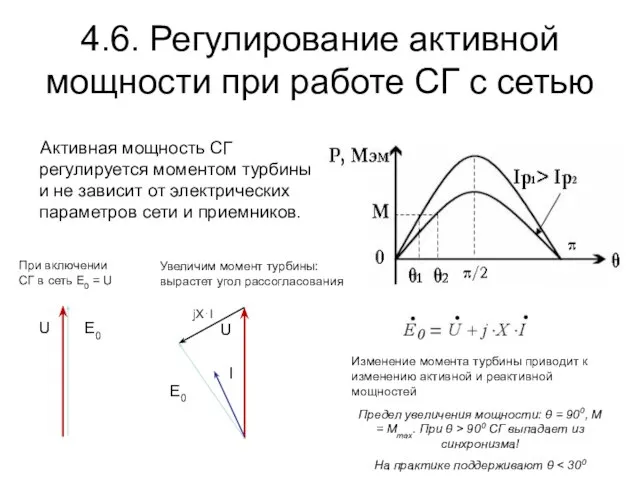
- 22. 4.6. Регулирование активной мощности при работе СГ с сетью Активная мощность СГ регулируется моментом турбины и
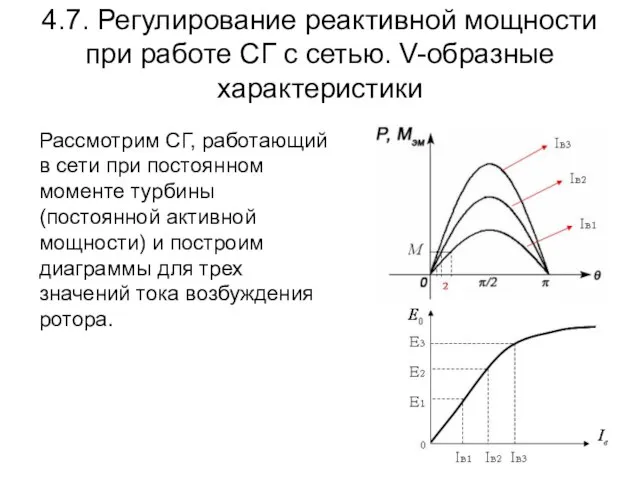
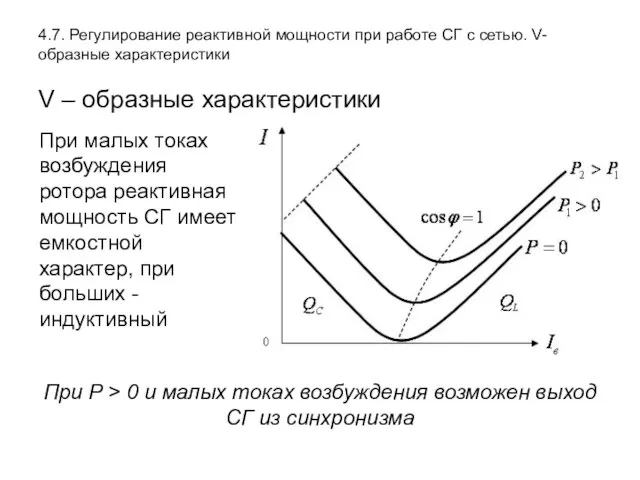
- 23. 4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики Рассмотрим СГ, работающий в сети
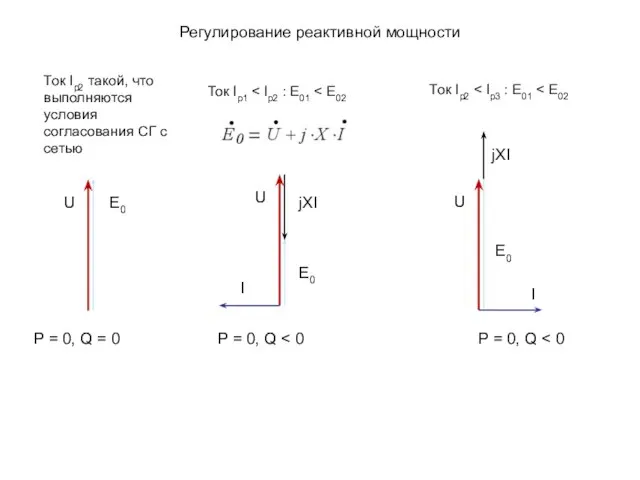
- 24. Регулирование реактивной мощности Ток Iр2 такой, что выполняются условия согласования СГ с сетью U E0 Р
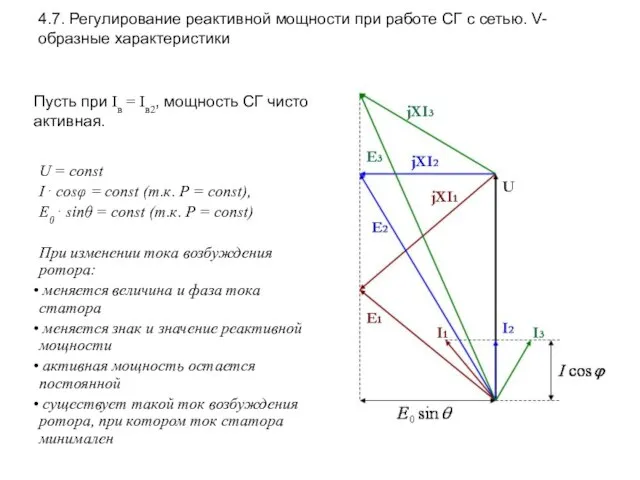
- 25. 4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики U = const I⋅ cosφ
- 26. 4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики V – образные характеристики При
- 27. 4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики Регулирование реактивной мощности изменением тока
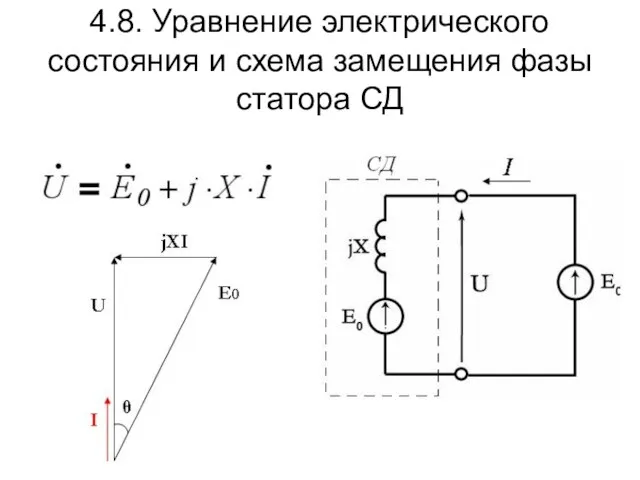
- 28. 4.8. Уравнение электрического состояния и схема замещения фазы статора СД
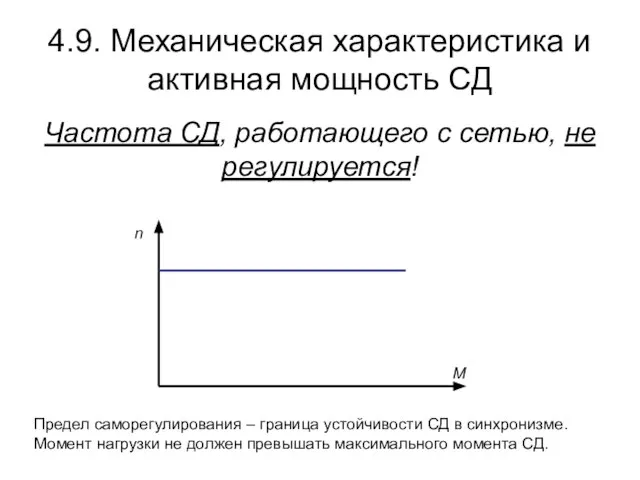
- 29. 4.9. Механическая характеристика и активная мощность СД Частота СД, работающего с сетью, не регулируется! n М
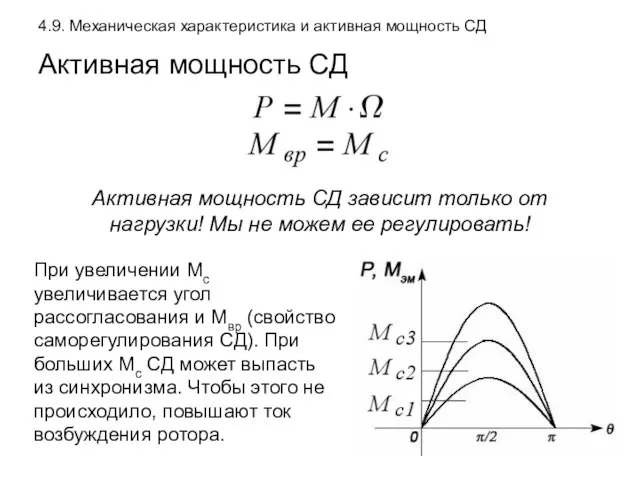
- 30. 4.9. Механическая характеристика и активная мощность СД Активная мощность СД Активная мощность СД зависит только от
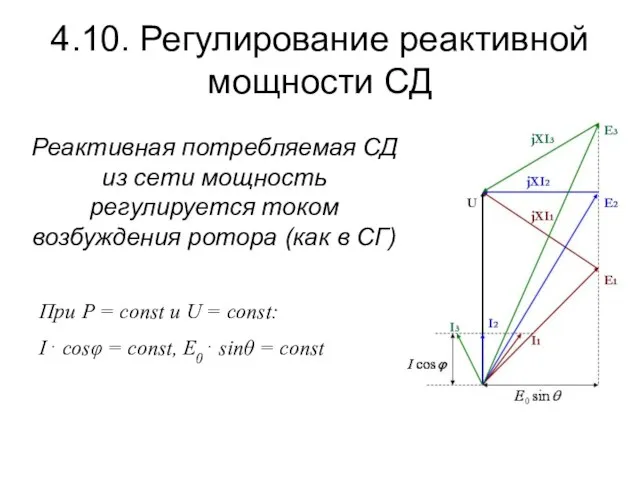
- 31. 4.10. Регулирование реактивной мощности СД Реактивная потребляемая СД из сети мощность регулируется током возбуждения ротора (как
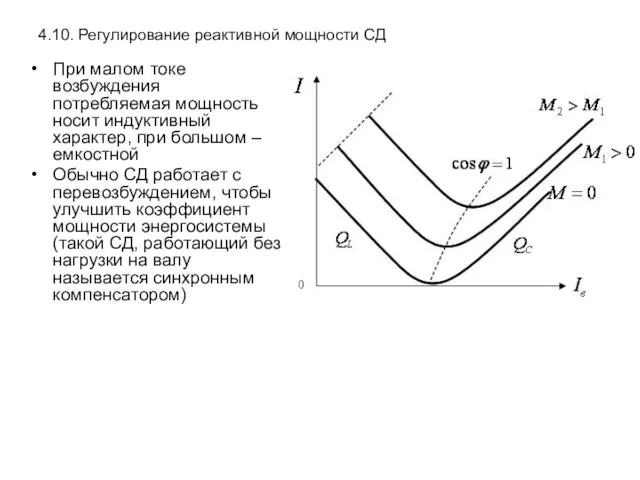
- 32. 4.10. Регулирование реактивной мощности СД При малом токе возбуждения потребляемая мощность носит индуктивный характер, при большом
- 34. Скачать презентацию
Слайд 24.1. Устройство и принцип действия
Синхронными называют электрические машины, в которых ротор вращается
4.1. Устройство и принцип действия
Синхронными называют электрические машины, в которых ротор вращается
Слайд 34.1. Устройство и принцип действия
Статор СМ точно такой же, как у асинхронных
4.1. Устройство и принцип действия
Статор СМ точно такой же, как у асинхронных
Слайд 44.1. Устройство и принцип действия
Явнополюсный ротор
Часто имеет 2 пары полюсов. В силу
4.1. Устройство и принцип действия
Явнополюсный ротор
Часто имеет 2 пары полюсов. В силу
Слайд 54.1. Устройство и принцип действия
Неявнополюсный ротор
Ротор имеет одну пару полюсов.
Конструкция прочная и
4.1. Устройство и принцип действия
Неявнополюсный ротор
Ротор имеет одну пару полюсов.
Конструкция прочная и
Слайд 64.1. Устройство и принцип действия
Принцип действия СГ.
Приведем ротор СГ во вращение и
4.1. Устройство и принцип действия
Принцип действия СГ.
Приведем ротор СГ во вращение и
Слайд 74.1. Устройство и принцип действия
Частота ЭДС равна частоте вращения ротора
Если подключить обмотки
4.1. Устройство и принцип действия
Частота ЭДС равна частоте вращения ротора
Если подключить обмотки
Слайд 84.1. Устройство и принцип действия
Резистивная нагрузка
В0
Bа
Врез
Ось результирующего поля смещена относительно оси
4.1. Устройство и принцип действия
Резистивная нагрузка
В0
Bа
Врез
Ось результирующего поля смещена относительно оси
Слайд 94.1. Устройство и принцип действия
Емкостная нагрузка
В0
Bа
Врез
угол рассогласования равен нулю;
тормозной момент
4.1. Устройство и принцип действия
Емкостная нагрузка
В0
Bа
Врез
угол рассогласования равен нулю;
тормозной момент
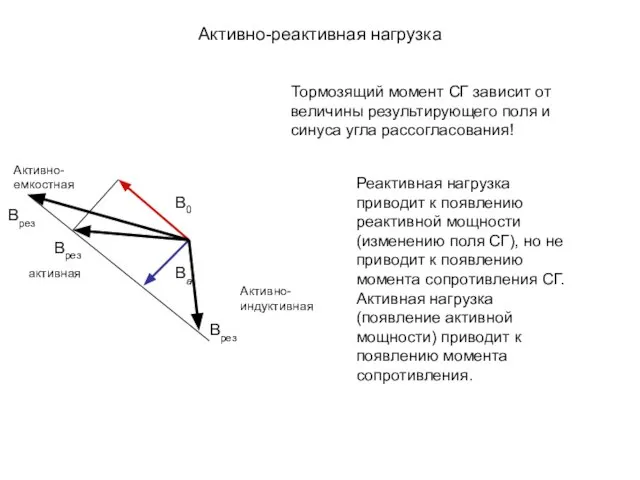
Слайд 10Активно-реактивная нагрузка
В0
Bа
Врез
Активно-емкостная
Активно-индуктивная
активная
Врез
Врез
Тормозящий момент СГ зависит от величины результирующего поля и синуса угла
Активно-реактивная нагрузка
В0
Bа
Врез
Активно-емкостная
Активно-индуктивная
активная
Врез
Врез
Тормозящий момент СГ зависит от величины результирующего поля и синуса угла
Слайд 114.1. Устройство и принцип действия
Выводы:
При подключении нагрузки изменяется магнитное поле СГ.
Чем больше
4.1. Устройство и принцип действия
Выводы:
При подключении нагрузки изменяется магнитное поле СГ.
Чем больше
Слайд 124.1. Устройство и принцип действия
Принцип действия СД
Статор подключается в трехфазной сети, т.о.
4.1. Устройство и принцип действия
Принцип действия СД
Статор подключается в трехфазной сети, т.о.
Слайд 134.1. Устройство и принцип действия
СД автоматически создает момент вращения, равный моменту сопротивления;
Чем
4.1. Устройство и принцип действия
СД автоматически создает момент вращения, равный моменту сопротивления;
Чем
Слайд 144.2. Схема замещения и уравнение электрического состояния обмотки статора СГ
Обозначения:
Е0 – ЭДС,
4.2. Схема замещения и уравнение электрического состояния обмотки статора СГ
Обозначения:
Е0 – ЭДС,
Слайд 154.2. Схема замещения и уравнение электрического состояния обмотки статора СГ
ЭДС самоиндукции Еа
4.2. Схема замещения и уравнение электрического состояния обмотки статора СГ
ЭДС самоиндукции Еа
Слайд 164.3. Момент и угловая характеристика СМ
Ia – активная составляющая тока статора
Ф –
4.3. Момент и угловая характеристика СМ
Ia – активная составляющая тока статора
Ф –
Слайд 174.3. Момент и угловая характеристика СМ
4.3. Момент и угловая характеристика СМ
Слайд 18Работа СГ в мощной энергосистеме
4.4. Мощная энергосистема
Энергосистема – это множество электрических станций
Работа СГ в мощной энергосистеме
4.4. Мощная энергосистема
Энергосистема – это множество электрических станций
Слайд 194.4. Мощная энергосистема
U = const, f = const независимо от режима работы
4.4. Мощная энергосистема
U = const, f = const независимо от режима работы
Слайд 204.5. Включение СГ на параллельную работу с сетью
При включении генератора в энергосистему
4.5. Включение СГ на параллельную работу с сетью
При включении генератора в энергосистему
Слайд 21Регулирование мощности синхронного генератора, работающего в сети
У автономно работающего генератора мощность определяется
Регулирование мощности синхронного генератора, работающего в сети
У автономно работающего генератора мощность определяется
Слайд 224.6. Регулирование активной мощности при работе СГ с сетью
Активная мощность СГ регулируется
4.6. Регулирование активной мощности при работе СГ с сетью
Активная мощность СГ регулируется
Слайд 234.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
Рассмотрим СГ,
4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
Рассмотрим СГ,
Слайд 24Регулирование реактивной мощности
Ток Iр2 такой, что выполняются условия согласования СГ с сетью
U
E0
Р
Регулирование реактивной мощности
Ток Iр2 такой, что выполняются условия согласования СГ с сетью
U
E0
Р
Слайд 254.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
U =
4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
U =
Слайд 264.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
V –
4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
V –
Слайд 274.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
Регулирование реактивной
4.7. Регулирование реактивной мощности при работе СГ с сетью. V-образные характеристики
Регулирование реактивной
Слайд 284.8. Уравнение электрического состояния и схема замещения фазы статора СД
4.8. Уравнение электрического состояния и схема замещения фазы статора СД
Слайд 294.9. Механическая характеристика и активная мощность СД
Частота СД, работающего с сетью, не
4.9. Механическая характеристика и активная мощность СД
Частота СД, работающего с сетью, не
Слайд 304.9. Механическая характеристика и активная мощность СД
Активная мощность СД
Активная мощность СД зависит
4.9. Механическая характеристика и активная мощность СД
Активная мощность СД
Активная мощность СД зависит
Слайд 314.10. Регулирование реактивной мощности СД
Реактивная потребляемая СД из сети мощность регулируется током
4.10. Регулирование реактивной мощности СД
Реактивная потребляемая СД из сети мощность регулируется током
Слайд 324.10. Регулирование реактивной мощности СД
При малом токе возбуждения потребляемая мощность носит индуктивный
4.10. Регулирование реактивной мощности СД
При малом токе возбуждения потребляемая мощность носит индуктивный
 Воспитательный потенциал семьи
Воспитательный потенциал семьи Система управления вязкостью топлива вспомогательного котла
Система управления вязкостью топлива вспомогательного котла Системы счисления и кодирование информации
Системы счисления и кодирование информации Беспроводная система управления
Беспроводная система управления Исследование опасности электромагнитной волны
Исследование опасности электромагнитной волны «ЭЛЕКТРОННАЯ БОЛЬНИЦА»
«ЭЛЕКТРОННАЯ БОЛЬНИЦА» Fit for partnership with Germany
Fit for partnership with Germany Домашние опасности
Домашние опасности Забытые виды спорта
Забытые виды спорта Презентация на тему Тундра и лесотундра России
Презентация на тему Тундра и лесотундра России  Наращение и дисконтирование по простым процентным ставкам. Тема 6.1
Наращение и дисконтирование по простым процентным ставкам. Тема 6.1 База - WPS Office
База - WPS Office Глагол
Глагол 1
1 Школьный парламент «Улей»
Школьный парламент «Улей» В лесу родилась елочка Здравствуй, Кузенька! Сынок! Не серчай, Кузенька! Нельзя мне в избушке без домового.
В лесу родилась елочка Здравствуй, Кузенька! Сынок! Не серчай, Кузенька! Нельзя мне в избушке без домового. Всеобщая декларация прав человека
Всеобщая декларация прав человека Презентация на тему Хромосомная теория наследственности 10 класс
Презентация на тему Хромосомная теория наследственности 10 класс  Профессиональный портрет педагога Политехнической школы
Профессиональный портрет педагога Политехнической школы В мире профессий (9 класс)
В мире профессий (9 класс) Зарубежная литература эпохи Просвещения
Зарубежная литература эпохи Просвещения О ликвидации 2 смены в школах Подмосковья
О ликвидации 2 смены в школах Подмосковья СОВРЕМЕННЫЕ МЕДИЦИНСКИЕ ТЕХНОЛОГИИ В ЗАМЕЩЕНИИ ПОСТРЕЗЕКЦИОННЫХ ДЕФЕКТОВ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРЕННОЙ КОСТИ
СОВРЕМЕННЫЕ МЕДИЦИНСКИЕ ТЕХНОЛОГИИ В ЗАМЕЩЕНИИ ПОСТРЕЗЕКЦИОННЫХ ДЕФЕКТОВ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРЕННОЙ КОСТИ Презентация на тему Что такое информация. Виды информации
Презентация на тему Что такое информация. Виды информации Диагностический инструментарий профориентационной работы: проблемы и перспективы
Диагностический инструментарий профориентационной работы: проблемы и перспективы Выступление старшего вице-президента ОАО «РЖД» Михайлова В.В.
Выступление старшего вице-президента ОАО «РЖД» Михайлова В.В. АВСТРИЯ – ЦЕНТР ВАШЕЙ ЭКОНОМИЧЕСКОЙ ДЕЯТЕЛЬНОСТИ
АВСТРИЯ – ЦЕНТР ВАШЕЙ ЭКОНОМИЧЕСКОЙ ДЕЯТЕЛЬНОСТИ о
о