Система распознавания объектов, обеспечивающая работу бортовой системы технического зрения в реальном времениН.И. Дмитриев, А.И.
- Система распознавания объектов, обеспечивающая работу бортовой системы технического зрения в реальном времениН.И. Дмитриев, А.И.

Содержание
- 2. СРО предназначена для автоматического обнаружения и распознавания объектов и определения углового направления на объекты поиска в
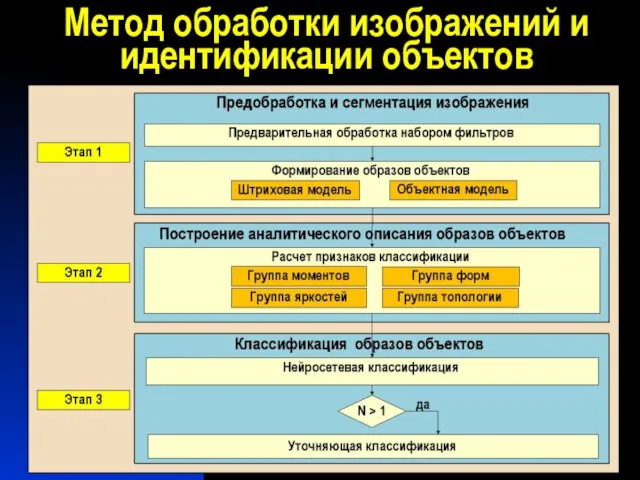
- 3. Метод обработки изображений и идентификации объектов
- 4. Предобработка изображений набором фильтров Задачи: – улучшение качества изображения, – повышение контраста объект поиска – фон,
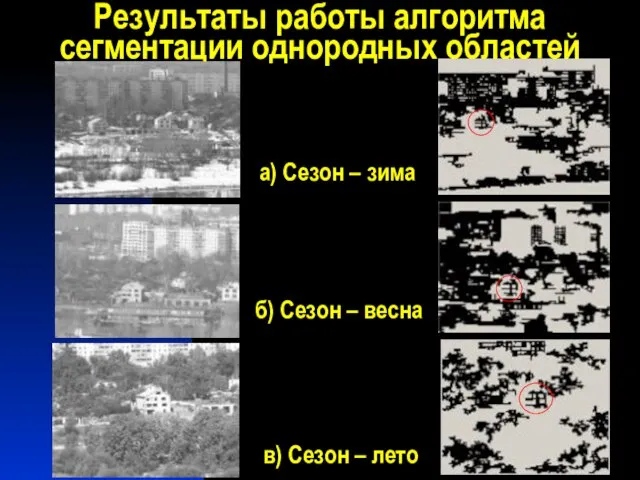
- 5. Результаты работы алгоритма сегментации однородных областей а) Сезон – зима б) Сезон – весна в) Сезон
- 6. Набор признаков классификации
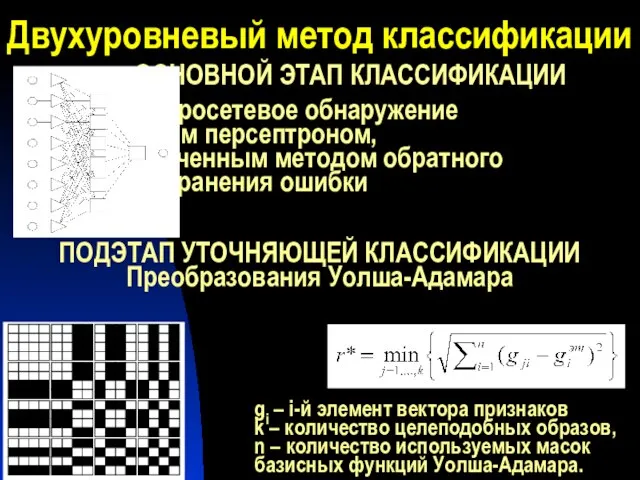
- 7. Двухуровневый метод классификации ОСНОВНОЙ ЭТАП КЛАССИФИКАЦИИ Нейросетевое обнаружение трехслойным персептроном, обученным методом обратного распространения ошибки ПОДЭТАП
- 8. Результат работы СРО – определение углового направления на цель в реальном времени, которое осуществляется путем: 1)
- 9. Основные достоинства системы распознавания объектов (СРО) для бортовой системы технического зрения: – устойчивость к яркостно-геометрической изменчивости
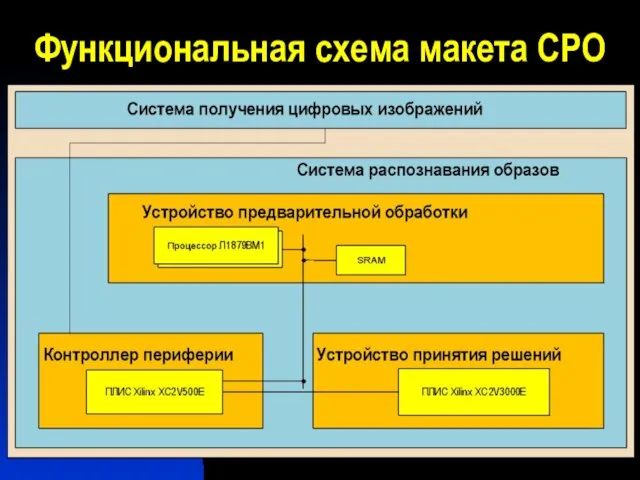
- 10. Функциональная схема макета СРО
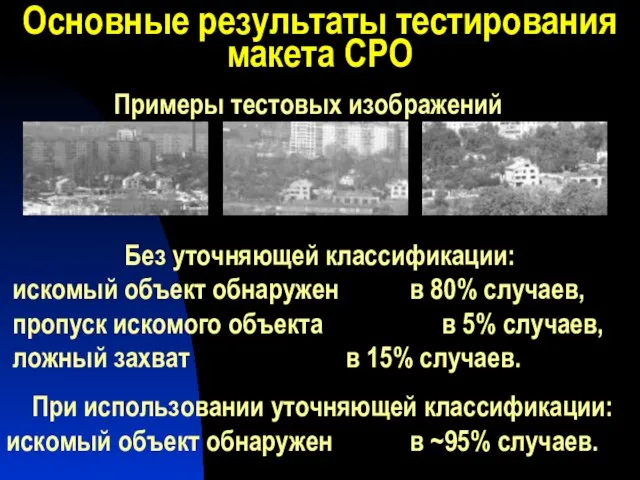
- 11. Основные результаты тестирования макета СРО Без уточняющей классификации: искомый объект обнаружен в 80% случаев, пропуск искомого
- 13. Скачать презентацию
Слайд 2
СРО предназначена
для автоматического обнаружения и распознавания объектов и определения углового направления на
СРО предназначена
для автоматического обнаружения и распознавания объектов и определения углового направления на
Слайд 3Метод обработки изображений и идентификации объектов
Метод обработки изображений и идентификации объектов
Слайд 4Предобработка изображений
набором фильтров
Задачи:
– улучшение качества изображения,
– повышение
Предобработка изображений
набором фильтров
Задачи:
– улучшение качества изображения,
– повышение
Слайд 5Результаты работы алгоритма
сегментации однородных областей
а) Сезон – зима
б) Сезон –
Результаты работы алгоритма
сегментации однородных областей
а) Сезон – зима
б) Сезон –
Слайд 6Набор признаков
классификации
Набор признаков
классификации

Слайд 7Двухуровневый метод классификации
ОСНОВНОЙ ЭТАП КЛАССИФИКАЦИИ
Нейросетевое обнаружение трехслойным персептроном,
обученным методом обратного
Двухуровневый метод классификации
ОСНОВНОЙ ЭТАП КЛАССИФИКАЦИИ
Нейросетевое обнаружение трехслойным персептроном,
обученным методом обратного
Слайд 8Результат работы СРО – определение углового направления на цель в реальном времени,
Результат работы СРО – определение углового направления на цель в реальном времени,
Слайд 9Основные достоинства
системы распознавания объектов (СРО)
для бортовой системы технического зрения:
Основные достоинства
системы распознавания объектов (СРО)
для бортовой системы технического зрения:
Слайд 10Функциональная схема макета СРО
Функциональная схема макета СРО
Слайд 11Основные результаты тестирования макета СРО
Без уточняющей классификации:
искомый объект обнаружен в 80%
Основные результаты тестирования макета СРО
Без уточняющей классификации:
искомый объект обнаружен в 80%
 Балки и балочные клетки
Балки и балочные клетки England
England Презентация на тему Вода источник жизни
Презентация на тему Вода источник жизни Направления органической эволюции
Направления органической эволюции Переход на новые образовательные стандарты(из опыта работы МБОУ ООШ д. Лаптево)
Переход на новые образовательные стандарты(из опыта работы МБОУ ООШ д. Лаптево) Задание_2
Задание_2 Презентация на тему Мир современных профессий
Презентация на тему Мир современных профессий Русская народная игрушка из глины
Русская народная игрушка из глины Модели полос поглощения
Модели полос поглощения Турнир знатоков русского языка
Турнир знатоков русского языка Интегрированный урок в начальной школе
Интегрированный урок в начальной школе Антуан де Сент-Экзюпери
Антуан де Сент-Экзюпери Современная живопись
Современная живопись Подвиг Героя ВОВ Шевелева Антона Антоновича
Подвиг Героя ВОВ Шевелева Антона Антоновича Особенности квалификации сварочных процедур при строительстве узла подготовки газа к транспорту КС "Портовая" СЕГ
Особенности квалификации сварочных процедур при строительстве узла подготовки газа к транспорту КС "Портовая" СЕГ Сравнения сказок Пушкина и Жуковского
Сравнения сказок Пушкина и Жуковского Лабораторная база кафедры «Композиционные материалы и физико-химия металлургических процессов» института цветных металлов и м
Лабораторная база кафедры «Композиционные материалы и физико-химия металлургических процессов» института цветных металлов и м КОМПЬЮТЕР И ВИДЕОКАМЕРА КАК ИНСТРУМЕНТЫ ОБУЧЕНИЯ ФИЗИКЕ
КОМПЬЮТЕР И ВИДЕОКАМЕРА КАК ИНСТРУМЕНТЫ ОБУЧЕНИЯ ФИЗИКЕ Процедура посещения магазина ТП преселлинга. 7 шагов к успеху
Процедура посещения магазина ТП преселлинга. 7 шагов к успеху 20171106_prilozhenie_3_slyshko
20171106_prilozhenie_3_slyshko Классный час
Классный час «Стратегия развития Сетевого ресурсного центра КПТК на 2011-2013 гг.» www.rc.kptc.org
«Стратегия развития Сетевого ресурсного центра КПТК на 2011-2013 гг.» www.rc.kptc.org Я - гражданин. Мои права и обязанности
Я - гражданин. Мои права и обязанности Психопроцессинг. Эмоциональная устойчивость во время конфликтных переговоров
Психопроцессинг. Эмоциональная устойчивость во время конфликтных переговоров Муниципальное общеобразовательное учреждение ООШ №18 х. Упорного
Муниципальное общеобразовательное учреждение ООШ №18 х. Упорного Документооборот в международных автоперевозках
Документооборот в международных автоперевозках  Сопротивление проводников
Сопротивление проводников  Понятие власти
Понятие власти