- Способы преобразования чертежа

Содержание
- 2. Преобразование чертежа – приведение геометрических Фигур в частное положение (параллельное или проецирующее) относительно плоскостей проекций с
- 3. Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических задач: метрических задач (определение длины,
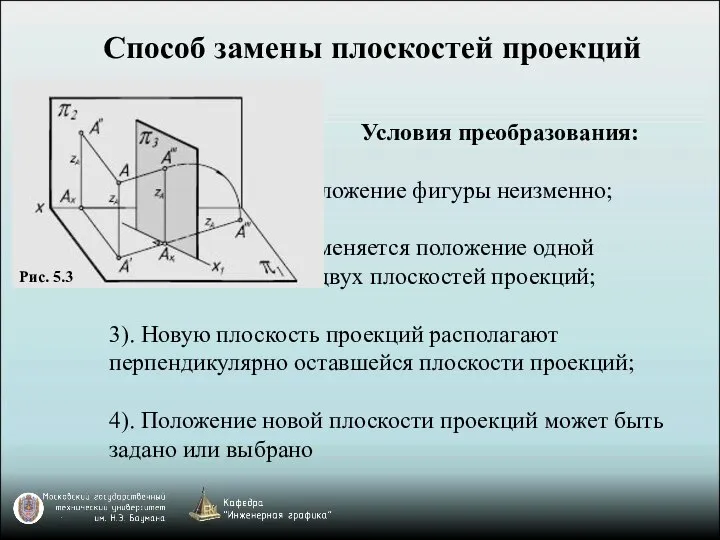
- 4. Условия преобразования: 1). Положение фигуры неизменно; 2). Изменяется положение одной из двух плоскостей проекций; 3). Новую
- 5. A" B" B' A' π2 π1 x Ах π1 π3 x1 Вх Ах1 A"' B"' |AB|
- 6. A' π2 π1 x π1 π3 x1 A'"≡ B'" B' 2. Преобразовать чертеж прямой уровня в
- 7. Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7). Рис. 5.7 x π2 π1 A"
- 8. Рис. Преобразовать чертеж плоскости общего положения в чертеж проецирующей плоскости (рис. 5.8) Новая ось проекций ┴
- 9. Основные задачи, решаемые заменой двух плоскостей проекций Преобразовать чертеж прямой общего положения в чертеж проецирующей прямой
- 10. 2. Преобразовать чертеж плоскости общего положения в чертеж плоскости уровня (рис. 5.10) π3 π2 π1 x
- 11. CПОСОБ ВРАЩЕНИЯ Суть способа вращения – фигура переводится в частное положение относительно неизменной системы основных плоскостей
- 12. СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ Рис. 5.11 Условия преобразования: 1. ось вращения i неподвижна и перпендикулярна
- 13. Рис. 5.12 f0α h0β A1' A2' A' ≡ O' A1" A" A2" B" i" O" Пример:
- 14. Вращение геометрической фигуры вокруг линии уровня производится с целью ее совмещения с плоскостью уровня. Применяется этот
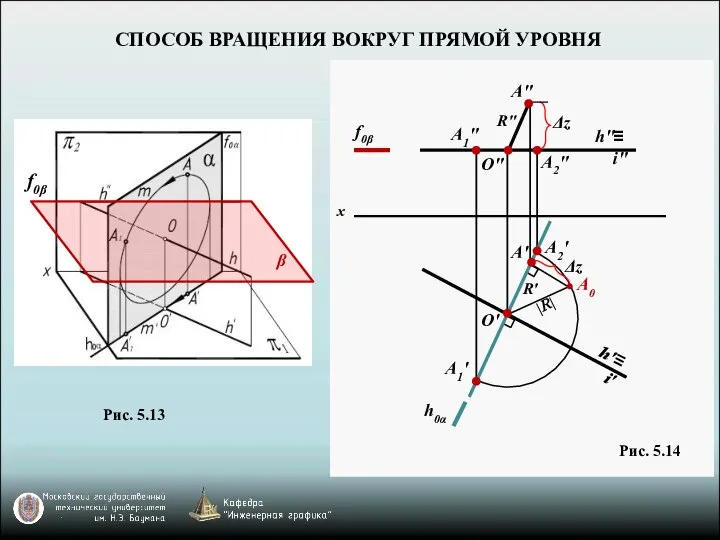
- 15. СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРЯМОЙ УРОВНЯ Рис. 5.13 Рис. 5.14 β f0β h" ≡ i" h' ≡
- 17. Скачать презентацию
Слайд 2Преобразование чертежа – приведение геометрических
Фигур в частное положение (параллельное или проецирующее)
Преобразование чертежа – приведение геометрических
Фигур в частное положение (параллельное или проецирующее)
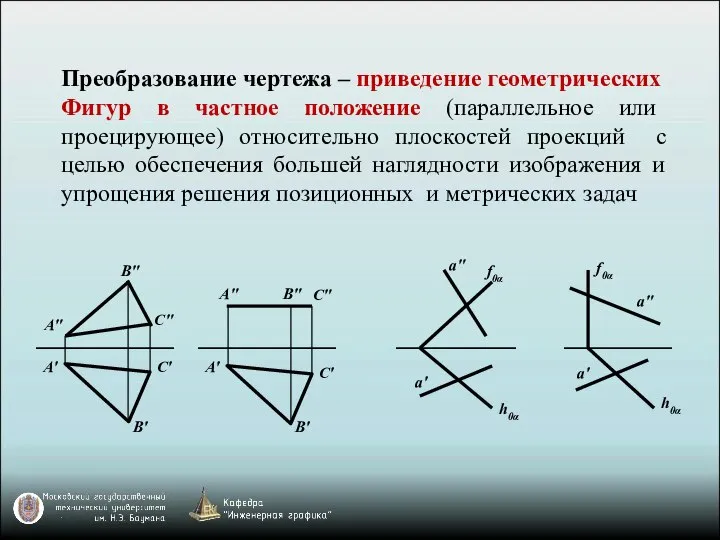
Слайд 3 Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических задач:
Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических задач:
Слайд 4Условия преобразования:
1). Положение фигуры неизменно;
2). Изменяется положение одной
из
Условия преобразования:
1). Положение фигуры неизменно;
2). Изменяется положение одной
из
Слайд 5A"
B"
B'
A'
π2
π1
x
Ах
π1
π3
x1
Вх
Ах1
A"'
B"'
|AB|
α
Вх1
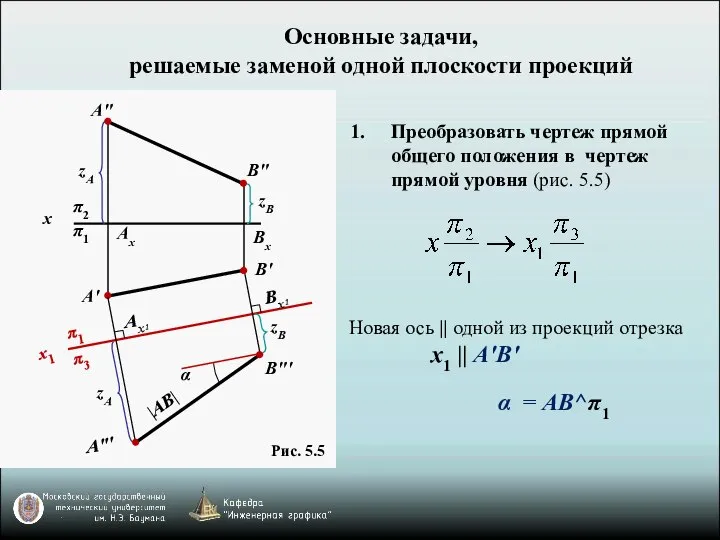
Преобразовать чертеж прямой общего положения в чертеж прямой уровня (рис. 5.5)
α =
A"
B"
B'
A'
π2
π1
x
Ах
π1
π3
x1
Вх
Ах1
A"'
B"'
|AB|
α
Вх1
Преобразовать чертеж прямой общего положения в чертеж прямой уровня (рис. 5.5)
α =
Слайд 6A'
π2
π1
x
π1
π3
x1
A'"≡ B'"
B'
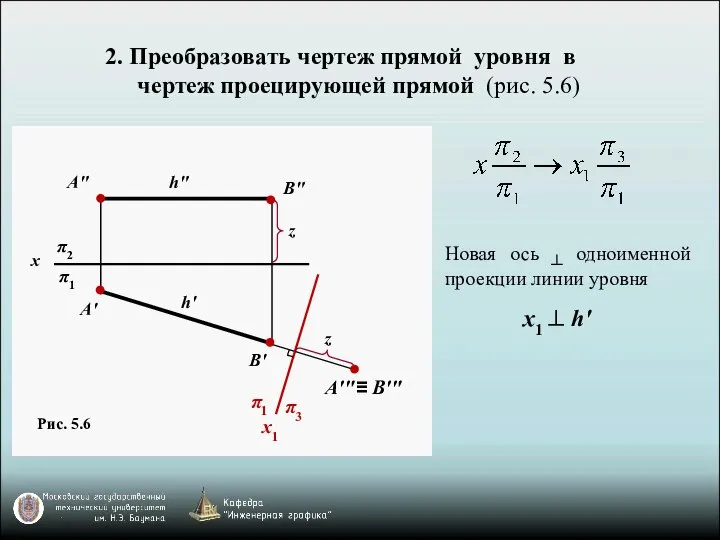
2. Преобразовать чертеж прямой уровня в чертеж проецирующей прямой (рис. 5.6)
Новая
A'
π2
π1
x
π1
π3
x1
A'"≡ B'"
B'
2. Преобразовать чертеж прямой уровня в чертеж проецирующей прямой (рис. 5.6)
Новая
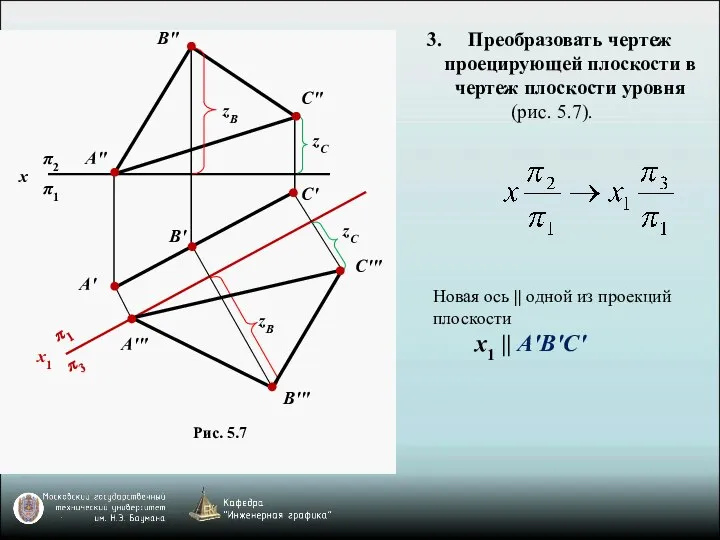
Слайд 7Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня
(рис. 5.7).
Рис. 5.7
x
π2
π1
A"
B"
C"
A'
B'
C'
A'"
B'"
C'"
zB
zC
zB
zC
x1
π3
π1
Новая ось
Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня
(рис. 5.7).
Рис. 5.7
x
π2
π1
A"
B"
C"
A'
B'
C'
A'"
B'"
C'"
zB
zC
zB
zC
x1
π3
π1
Новая ось
Слайд 8Рис.
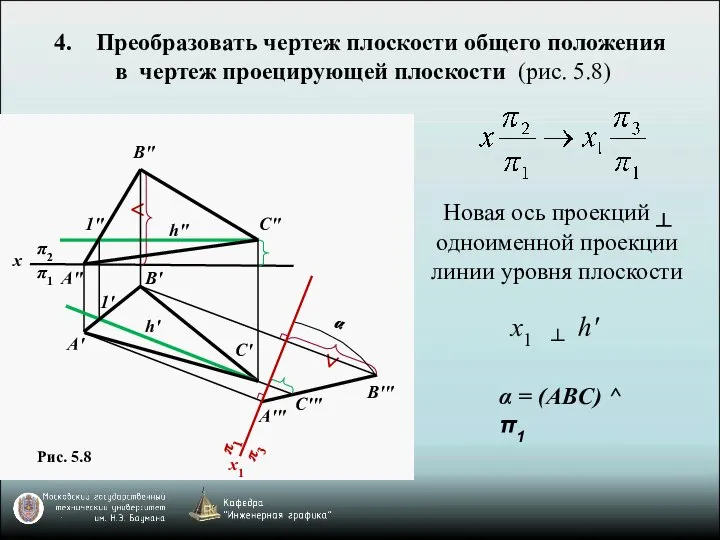
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис. 5.8)
Новая
Рис.
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис. 5.8)
Новая
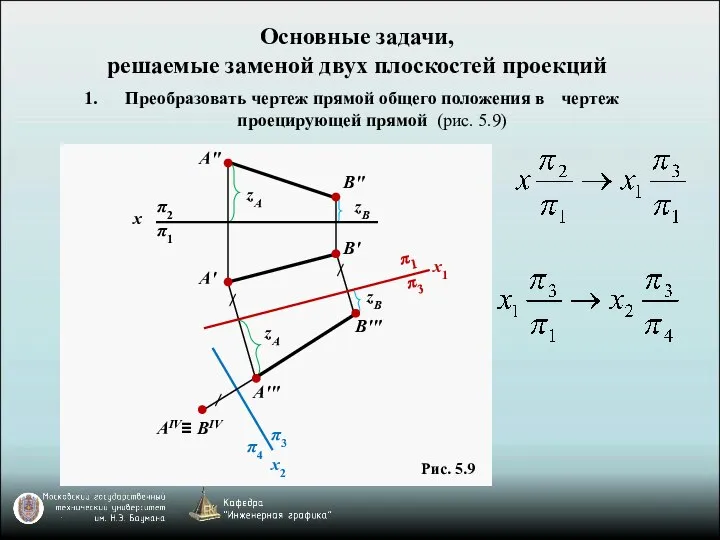
Слайд 9Основные задачи,
решаемые заменой двух плоскостей проекций
Преобразовать чертеж прямой общего положения
Основные задачи,
решаемые заменой двух плоскостей проекций
Преобразовать чертеж прямой общего положения
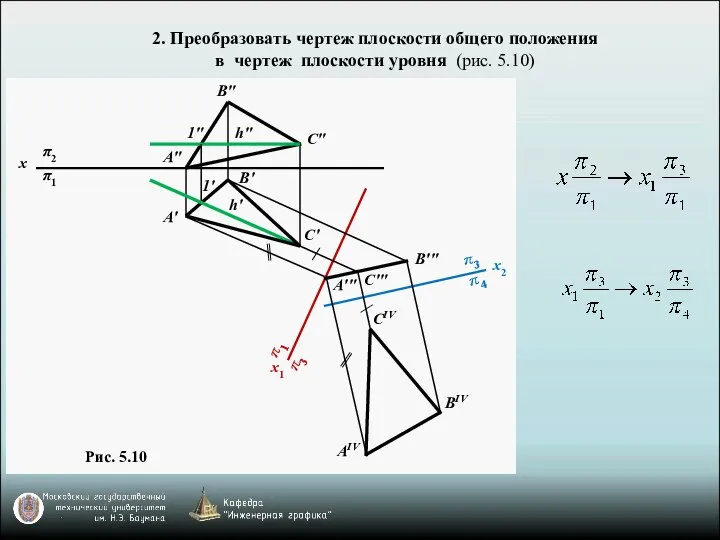
Слайд 102. Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис. 5.10)
π3
π2
π1
x
x1
x2
π4
π1
π3
C"
1"
A"
B"
h"
A'
C'
B'
h'
1'
C'"
B'"
A'"
AIV
BIV
CIV
2. Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис. 5.10)
π3
π2
π1
x
x1
x2
π4
π1
π3
C"
1"
A"
B"
h"
A'
C'
B'
h'
1'
C'"
B'"
A'"
AIV
BIV
CIV
Слайд 11CПОСОБ ВРАЩЕНИЯ
Суть способа вращения – фигура переводится в частное положение относительно неизменной
CПОСОБ ВРАЩЕНИЯ
Суть способа вращения – фигура переводится в частное положение относительно неизменной
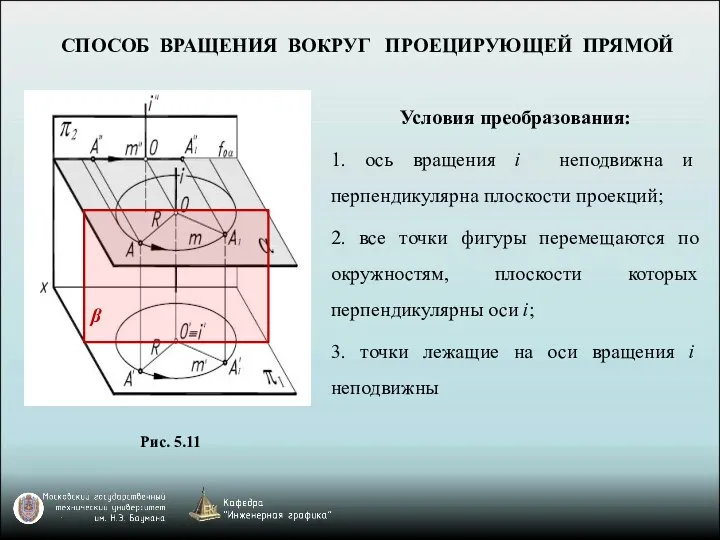
Слайд 12СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ
Рис. 5.11
Условия преобразования:
1. ось вращения i неподвижна и
СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ
Рис. 5.11
Условия преобразования:
1. ось вращения i неподвижна и
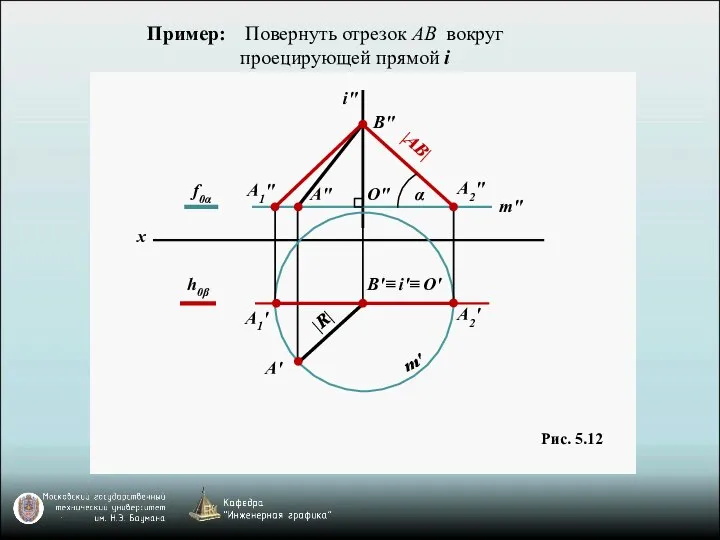
Слайд 13Рис. 5.12
f0α
h0β
A1'
A2'
A'
≡ O'
A1"
A"
A2"
B"
i"
O"
Пример: Повернуть отрезок AB вокруг проецирующей прямой i
m'
m"
x
B'
≡ i'
|R|
|AB|
α
Рис. 5.12
f0α
h0β
A1'
A2'
A'
≡ O'
A1"
A"
A2"
B"
i"
O"
Пример: Повернуть отрезок AB вокруг проецирующей прямой i
m'
m"
x
B'
≡ i'
|R|
|AB|
α
Слайд 14 Вращение геометрической фигуры вокруг линии уровня производится с целью ее совмещения с
Вращение геометрической фигуры вокруг линии уровня производится с целью ее совмещения с
Слайд 15СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРЯМОЙ УРОВНЯ
Рис. 5.13
Рис. 5.14
β
f0β
h"
≡ i"
h'
≡ i'
f0β
h0α
A'
O'
R'
|R|
A1'
A2'
O"
A"
R"
A1"
A2"
A0
Δz
Δz
x
СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРЯМОЙ УРОВНЯ
Рис. 5.13
Рис. 5.14
β
f0β
h"
≡ i"
h'
≡ i'
f0β
h0α
A'
O'
R'
|R|
A1'
A2'
O"
A"
R"
A1"
A2"
A0
Δz
Δz
x
 Программно-методический комплекс ОРГ-МАСТЕР ®Графикс
Программно-методический комплекс ОРГ-МАСТЕР ®Графикс English speaking countries
English speaking countries Сады сбываются. Сад по-новому
Сады сбываются. Сад по-новому Презентация на тему Педагогический опыт работы учителя английского языка
Презентация на тему Педагогический опыт работы учителя английского языка The PIR-PSD current release 78.03, November 24, 2003, contains 283366 entries. 65 proteins The PIR was established in 1984 by the National Biomedical.
The PIR-PSD current release 78.03, November 24, 2003, contains 283366 entries. 65 proteins The PIR was established in 1984 by the National Biomedical. Проектирование региональных МИС
Проектирование региональных МИС Всероссийский физкультурно - спортивный комплекс Готов к труду и обороне (ГТО)
Всероссийский физкультурно - спортивный комплекс Готов к труду и обороне (ГТО) Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП
Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП Выбор
Выбор Считалки на английском
Считалки на английском  Развитие социальной психологии
Развитие социальной психологии Историческое развитие человечества: поиски социальной макротеории
Историческое развитие человечества: поиски социальной макротеории Коммерческое предложение по ГБО для таксомоторных парков от Гарант-Газ
Коммерческое предложение по ГБО для таксомоторных парков от Гарант-Газ Государственная Третьяковская галерея
Государственная Третьяковская галерея Космограммы студентов
Космограммы студентов Об организации работы в УПФР в Увинском районе по приему и обработке заявлений о перерасчете по нестраховым периодам
Об организации работы в УПФР в Увинском районе по приему и обработке заявлений о перерасчете по нестраховым периодам Республике Карелия 85 лет
Республике Карелия 85 лет Современный мир 10 класс
Современный мир 10 класс Архитектурный дизайн городской среды
Архитектурный дизайн городской среды Омплексное решение для вашего бизнеса
Омплексное решение для вашего бизнеса Stratagy of future
Stratagy of future Открытый урок
Открытый урок 79a28ae3aada471eb2bf6b04f93de9cc
79a28ae3aada471eb2bf6b04f93de9cc Тренинг по решению конфликтов среди подростков
Тренинг по решению конфликтов среди подростков Правописание гласных после шипящих и Ц
Правописание гласных после шипящих и Ц «Мой край родной, люблю тебя...»(создание экскурсионного маршрута)
«Мой край родной, люблю тебя...»(создание экскурсионного маршрута) Мосгормаш -технопарк будущего
Мосгормаш -технопарк будущего Обеспечение
Обеспечение