- ТЕОРИЯ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ

Содержание
- 2. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Работа, совершаемая статически приложенной силой Fi , равна сумме элементарных Итак, Получено простое
- 3. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Внутренние усилия препятствуют развитию деформации тела, поэтому при нагружении тела, не имеющего начальных
- 4. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ dU – потенциальная энергия деформации, представленного на рисунке элемента стержня
- 5. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Потенциальная энергия упругой деформации плоской стержневой системы Виртуальными или возможными называют малые перемещения
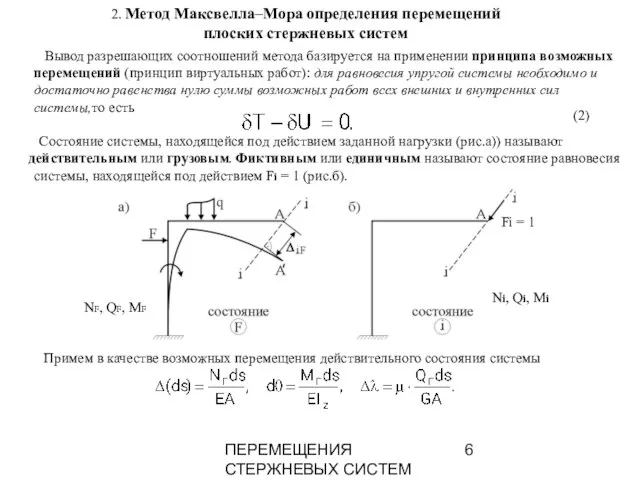
- 6. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ 2. Метод Максвелла–Мора определения перемещений плоских стержневых систем Вывод разрешающих соотношений метода базируется
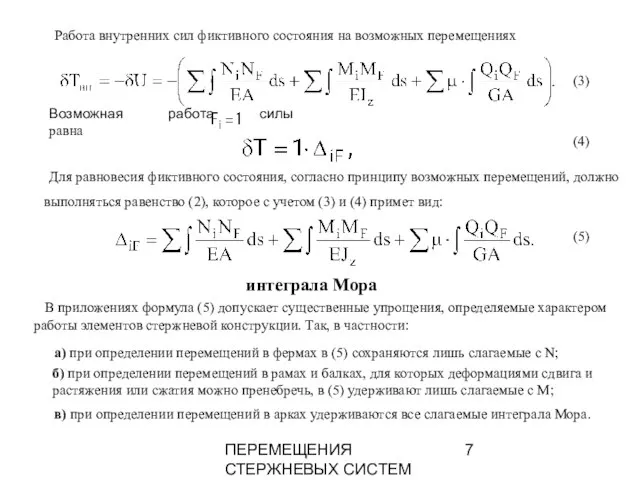
- 7. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Работа внутренних сил фиктивного состояния на возможных перемещениях Возможная работа силы равна Для
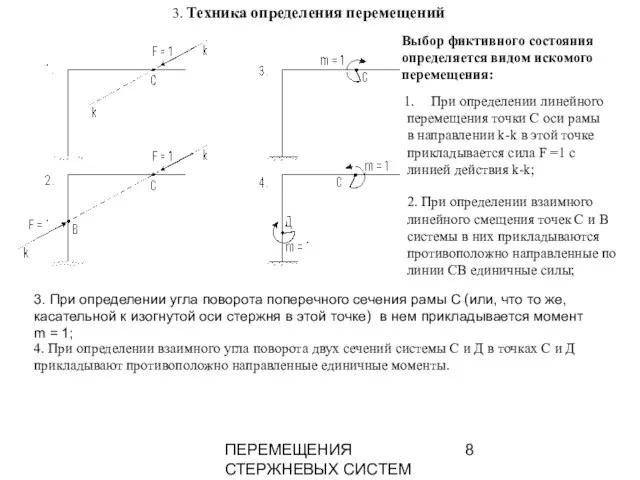
- 8. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ 3. Техника определения перемещений Выбор фиктивного состояния определяется видом искомого перемещения: При определении
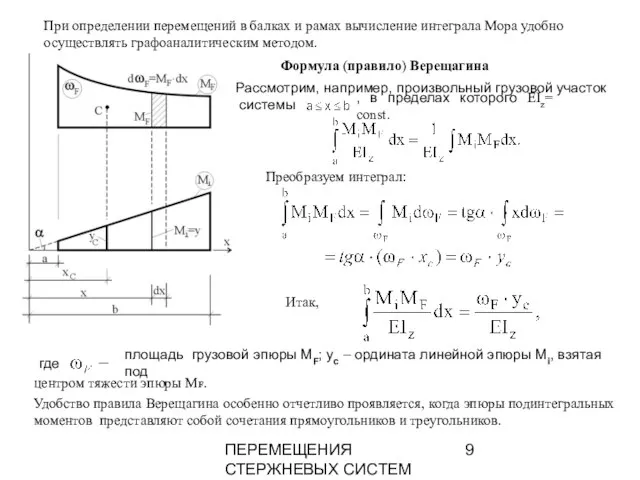
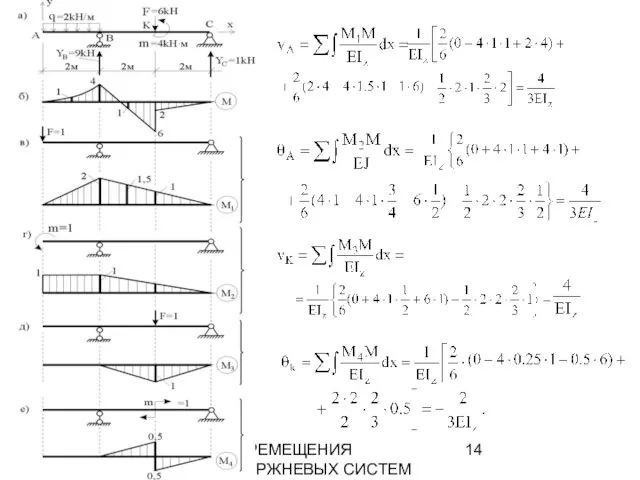
- 9. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ При определении перемещений в балках и рамах вычисление интеграла Мора удобно осуществлять графоаналитическим
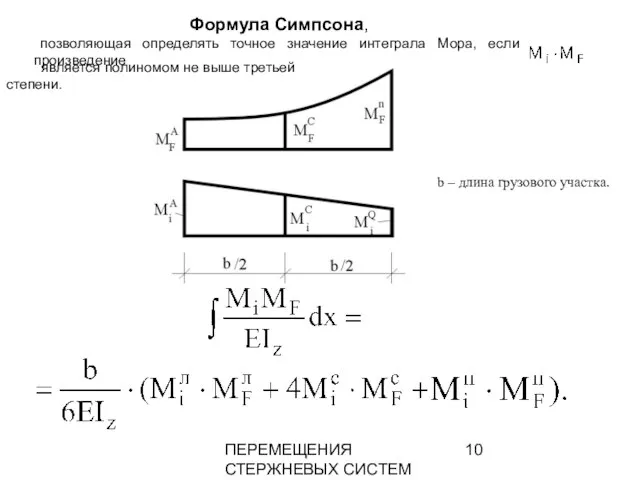
- 10. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Формула Симпсона, позволяющая определять точное значение интеграла Мора, если произведение является полиномом не
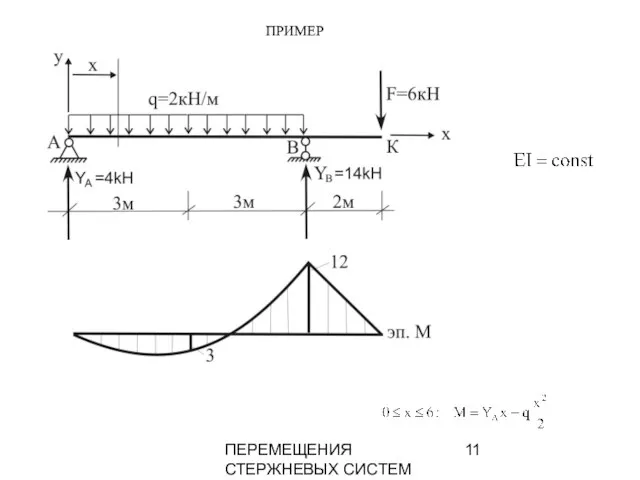
- 11. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ ПРИМЕР
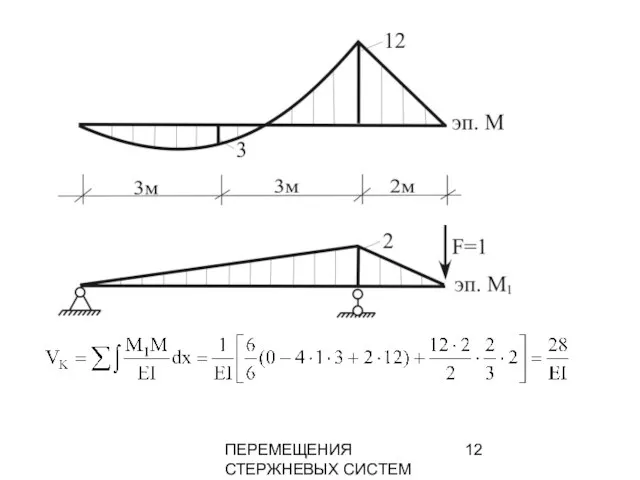
- 12. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
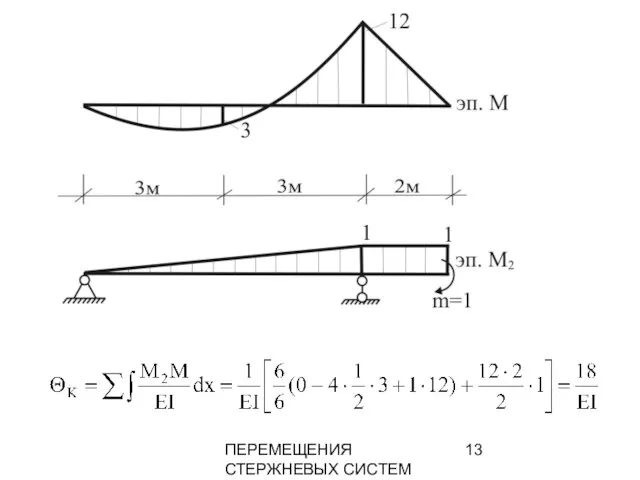
- 13. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
- 14. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
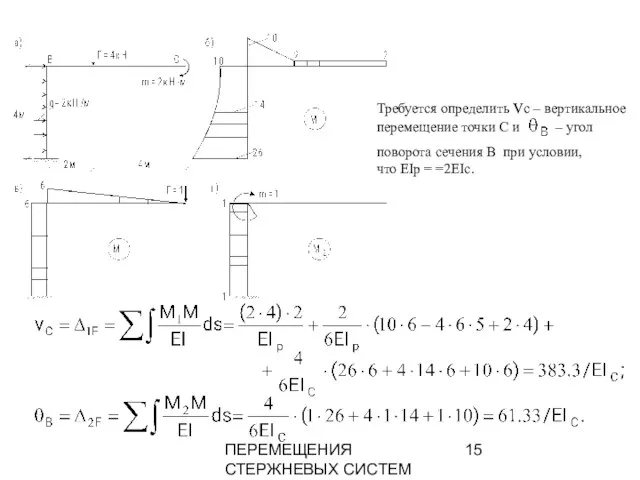
- 15. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ поворота сечения В при условии, что EIp = =2EIc. Требуется определить vc –
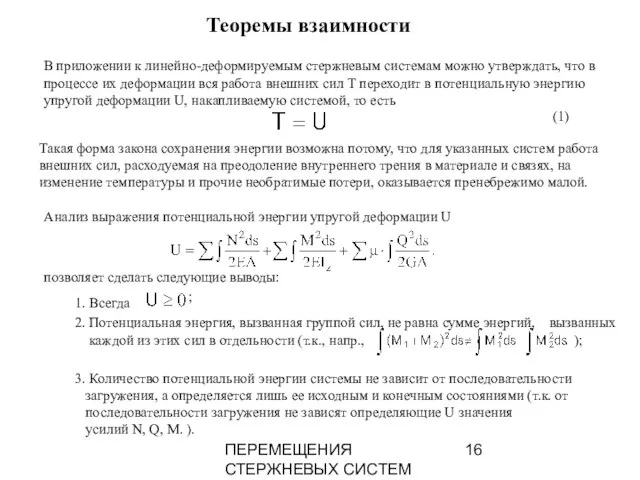
- 16. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Теоремы взаимности В приложении к линейно-деформируемым стержневым системам можно утверждать, что в процессе
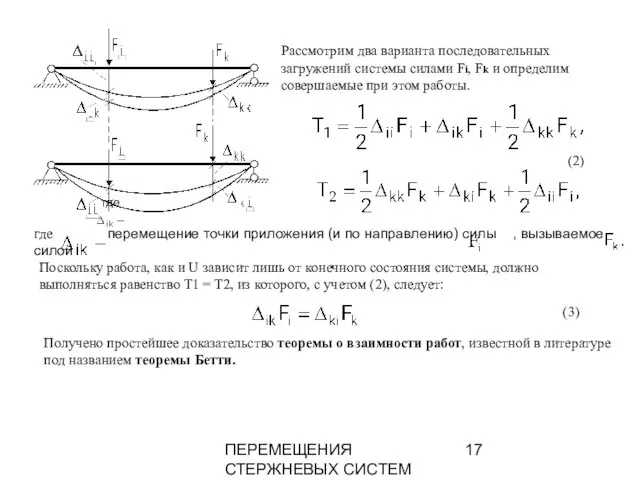
- 17. ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ Рассмотрим два варианта последовательных загружений системы силами Fi, Fk и определим совершаемые при
- 19. Скачать презентацию
Слайд 2ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
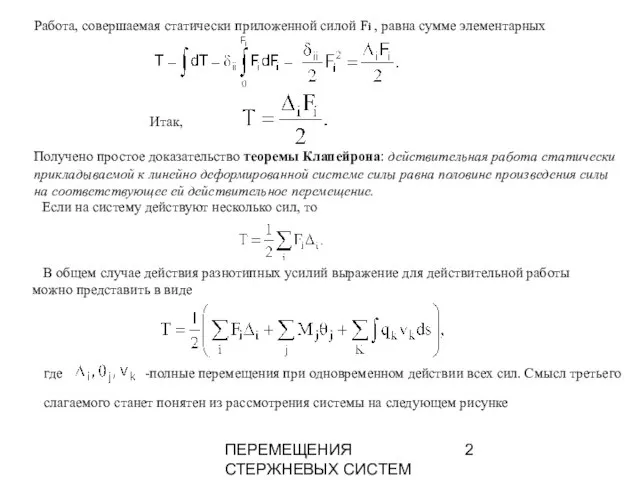
Работа, совершаемая статически приложенной силой Fi , равна сумме элементарных
Итак,
Получено
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Работа, совершаемая статически приложенной силой Fi , равна сумме элементарных
Итак,
Получено
Слайд 3ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
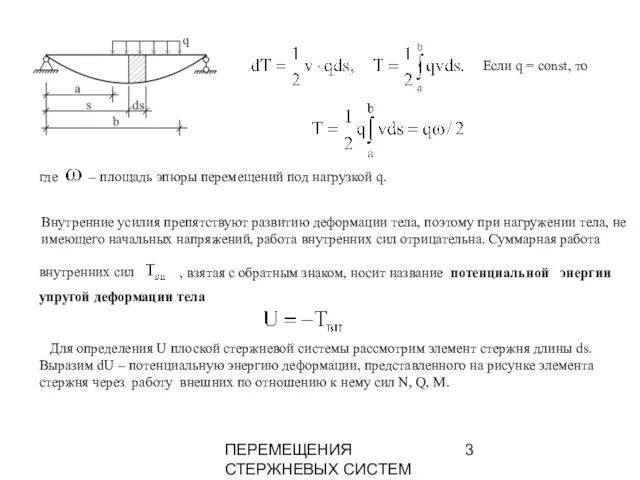
Внутренние усилия препятствуют развитию деформации тела, поэтому при нагружении тела,
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Внутренние усилия препятствуют развитию деформации тела, поэтому при нагружении тела,
Слайд 4ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
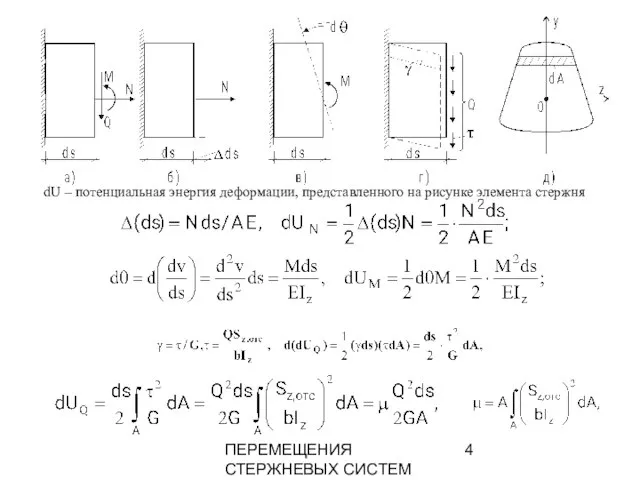
dU – потенциальная энергия деформации, представленного на рисунке элемента стержня
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
dU – потенциальная энергия деформации, представленного на рисунке элемента стержня
Слайд 5ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
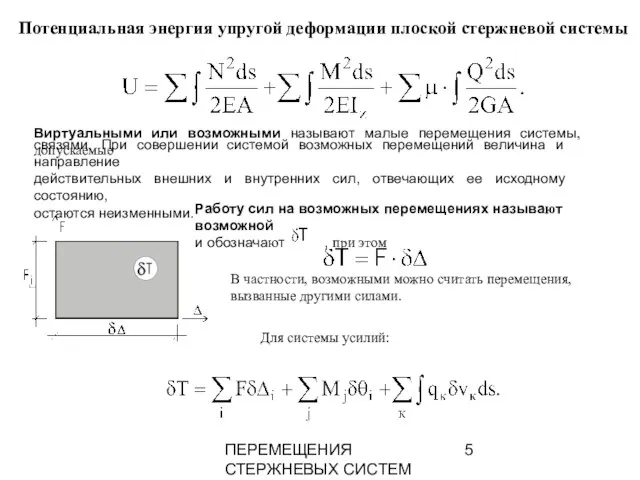
Потенциальная энергия упругой деформации плоской стержневой системы
Виртуальными или возможными
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Потенциальная энергия упругой деформации плоской стержневой системы
Виртуальными или возможными
Слайд 6ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
2. Метод Максвелла–Мора определения перемещений
плоских стержневых систем
Вывод разрешающих соотношений
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
2. Метод Максвелла–Мора определения перемещений
плоских стержневых систем
Вывод разрешающих соотношений
Слайд 7ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Работа внутренних сил фиктивного состояния на возможных перемещениях
Возможная работа
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Работа внутренних сил фиктивного состояния на возможных перемещениях
Возможная работа
Слайд 8ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
3. Техника определения перемещений
Выбор фиктивного состояния
определяется видом искомого
перемещения:
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
3. Техника определения перемещений
Выбор фиктивного состояния
определяется видом искомого
перемещения:
Слайд 9ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
При определении перемещений в балках и рамах вычисление интеграла Мора
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
При определении перемещений в балках и рамах вычисление интеграла Мора
Слайд 10ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Формула Симпсона,
позволяющая определять точное значение интеграла Мора, если
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Формула Симпсона,
позволяющая определять точное значение интеграла Мора, если
Слайд 11ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
ПРИМЕР
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
ПРИМЕР
Слайд 12ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Слайд 13ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Слайд 14ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Слайд 15ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
поворота сечения В при условии,
что EIp = =2EIc.
Требуется определить
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
поворота сечения В при условии,
что EIp = =2EIc.
Требуется определить
Слайд 16ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Теоремы взаимности
В приложении к линейно-деформируемым стержневым системам можно утверждать, что
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Теоремы взаимности
В приложении к линейно-деформируемым стержневым системам можно утверждать, что
Слайд 17ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Рассмотрим два варианта последовательных
загружений системы силами Fi, Fk и определим
ПЕРЕМЕЩЕНИЯ СТЕРЖНЕВЫХ СИСТЕМ
Рассмотрим два варианта последовательных
загружений системы силами Fi, Fk и определим
 ПАМЯТЬ КОМПЬЮТЕРА
ПАМЯТЬ КОМПЬЮТЕРА Методы и алгоритмы интеллектуальной поддержки принятия решений в задачах диагностики технических систем в машиностроении
Методы и алгоритмы интеллектуальной поддержки принятия решений в задачах диагностики технических систем в машиностроении Робер Кампен (1378 – 1444)
Робер Кампен (1378 – 1444) История холодной войны
История холодной войны Информация Информационные процессы
Информация Информационные процессы  Формирование муниципального задания и финансового норматива на услуги дошкольного образования, обеспечивающего развитие вариа
Формирование муниципального задания и финансового норматива на услуги дошкольного образования, обеспечивающего развитие вариа 上网课的利与弊
上网课的利与弊 Презентация на тему Древнейшие люди
Презентация на тему Древнейшие люди А Вы уже пробовали? П р о д у к ц и ю к о м п а н и и : ?
А Вы уже пробовали? П р о д у к ц и ю к о м п а н и и : ? "Особенности разработки электронного учебно - методического комплекса для расширения методического и творческого взаимодейст
"Особенности разработки электронного учебно - методического комплекса для расширения методического и творческого взаимодейст О внедрении и развитии в Республике Башкортостан института посредничества (медиации) при разрешении семейно-правовых споров
О внедрении и развитии в Республике Башкортостан института посредничества (медиации) при разрешении семейно-правовых споров Вильям Шекспир
Вильям Шекспир Web-сайт Гиперструктура данных
Web-сайт Гиперструктура данных Фонды. Благотворительній фонд имени Елены Ивановны Рерих
Фонды. Благотворительній фонд имени Елены Ивановны Рерих Казанский собор
Казанский собор Урал
Урал Магнит на холодильник из пластиковой бутылки
Магнит на холодильник из пластиковой бутылки Опорно-двигательная система птиц
Опорно-двигательная система птиц Заказчик: Министерство Экономического Развития и Торговли РФ Разработка: ООО «Дигитал Зон» Формирование единой информационной си
Заказчик: Министерство Экономического Развития и Торговли РФ Разработка: ООО «Дигитал Зон» Формирование единой информационной си 2010
2010 Ядерная пора Энтропийное исключение.
Ядерная пора Энтропийное исключение. Стабильность и новации в условиях кризиса системы государственного и муниципального заказов Калужской области
Стабильность и новации в условиях кризиса системы государственного и муниципального заказов Калужской области Презентация на тему «Любовная лирика Ф. Тютчева. Подготовила учитель русского языка и литературы МОУ СОШ №2 Лыженкова О. Д.
Презентация на тему «Любовная лирика Ф. Тютчева. Подготовила учитель русского языка и литературы МОУ СОШ №2 Лыженкова О. Д. Лишняя жилая площадь и её правовой режим
Лишняя жилая площадь и её правовой режим Различие частиц не и ни
Различие частиц не и ни Я ученик школы №4
Я ученик школы №4 Материальная часть стрелкового оружия
Материальная часть стрелкового оружия Организация обучения УКНиУ в дистанционном формате
Организация обучения УКНиУ в дистанционном формате