- Многоконтурные системы АЭП

Содержание
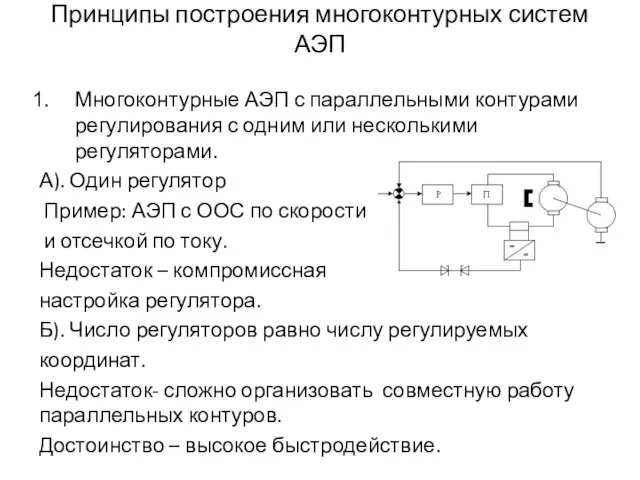
- 2. Принципы построения многоконтурных систем АЭП Многоконтурные АЭП с параллельными контурами регулирования с одним или несколькими регуляторами.
- 3. Принципы построения многоконтурных систем АЭП 2. Многоконтурные системы с концентрическими контурами регулирования (последовательно включенными регуляторами). У
- 4. Принципы построения многоконтурных систем АЭП Достоинства: - возможность реализации оптимальных законов управления каждым параметром (число контуров
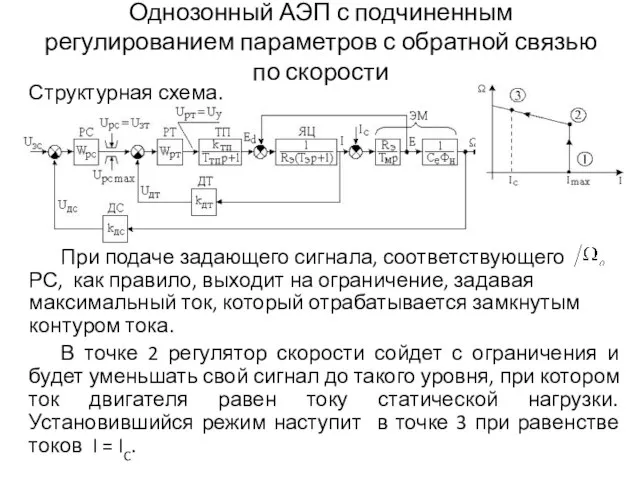
- 5. Однозонный АЭП с подчиненным регулированием параметров с обратной связью по скорости Структурная схема. При подаче задающего
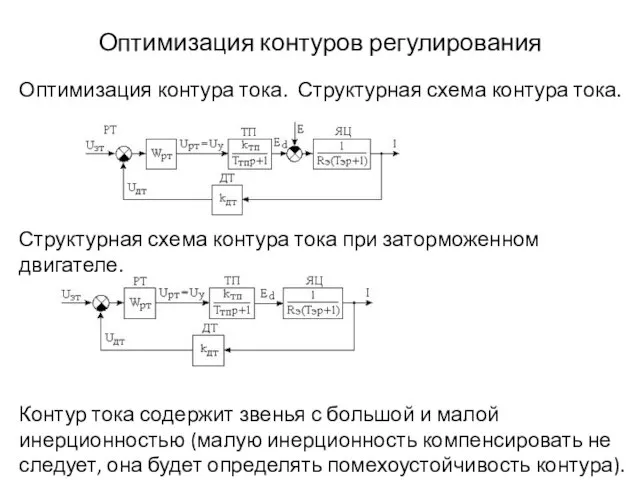
- 6. Оптимизация контуров регулирования Оптимизация контура тока. Структурная схема контура тока. Структурная схема контура тока при заторможенном
- 7. Оптимизация контура тока Оптимизация контура тока на модульный оптимум (МО). Запишем Получим РТ – ПИ типа,
- 8. Оптимизация контура тока Оценка влияния внутренней обратной связи по ЭДС на процессы в контуре тока. Структурная
- 9. Оптимизация контура тока Передаточная функция звена якорной цепи с учетом влияния внутренней обратной связи по ЭДС
- 10. Оптимизация контура тока Передаточные функции разомкнутого и замкнутого контора тока с учетом влияния внутренней обратной связи
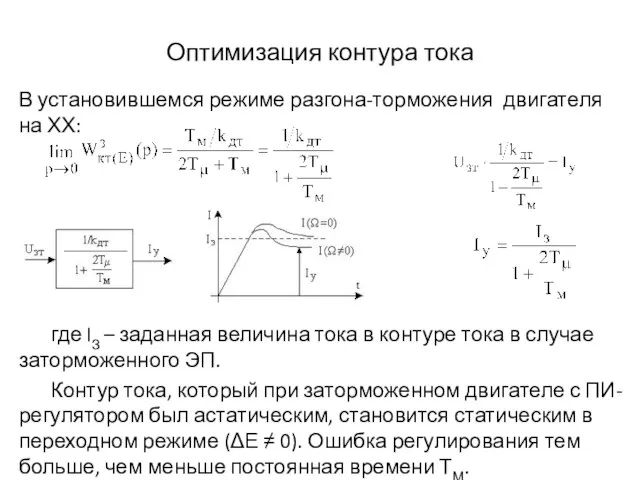
- 11. Оптимизация контура тока В установившемся режиме разгона-торможения двигателя на ХХ: где IЗ – заданная величина тока
- 12. Оптимизация контура тока Другое следствие влияния ОС по ЭДС - это увеличенное перерегулирование. По отношению к
- 13. Оптимизация контура тока Осциллограммы тока при отработке скачка задающего сигнала при заторможенном двигателе и при учете
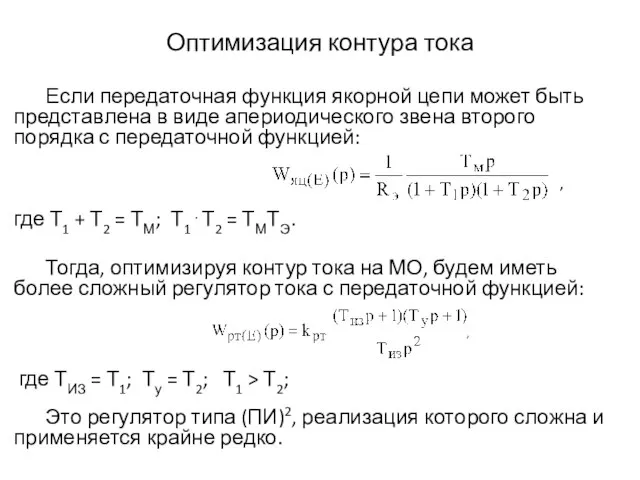
- 14. Оптимизация контура тока Если передаточная функция якорной цепи может быть представлена в виде апериодического звена второго
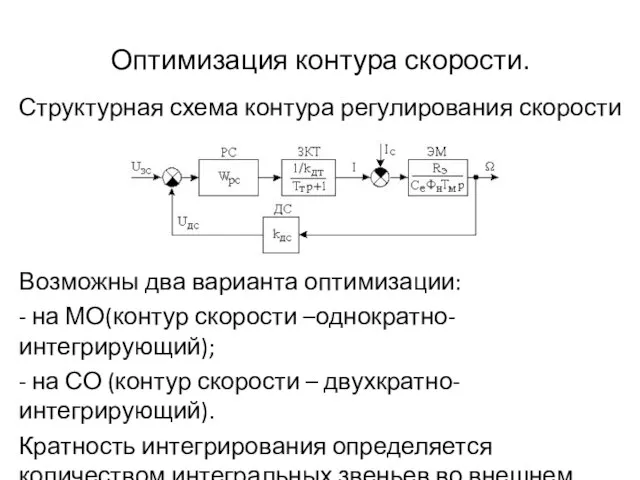
- 15. Оптимизация контура скорости. Структурная схема контура регулирования скорости Возможны два варианта оптимизации: - на МО(контур скорости
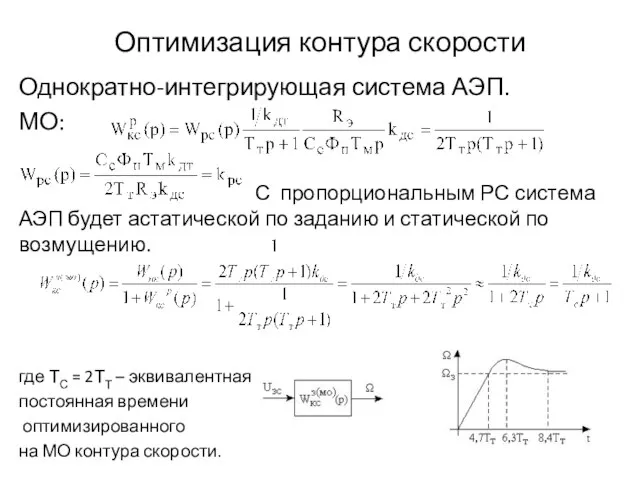
- 16. Оптимизация контура скорости Однократно-интегрирующая система АЭП. МО: С пропорциональным РС система АЭП будет астатической по заданию
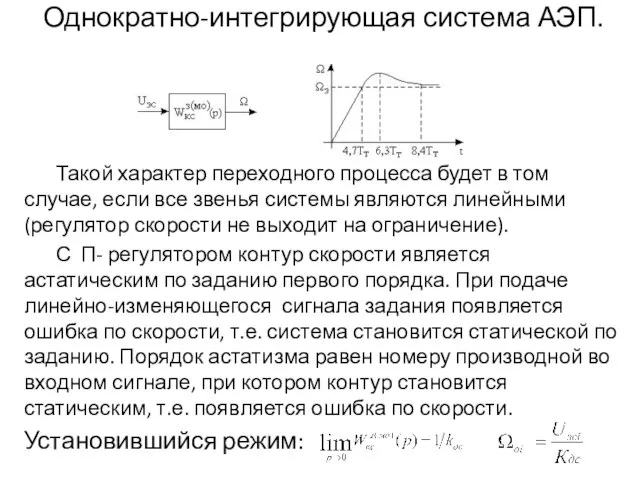
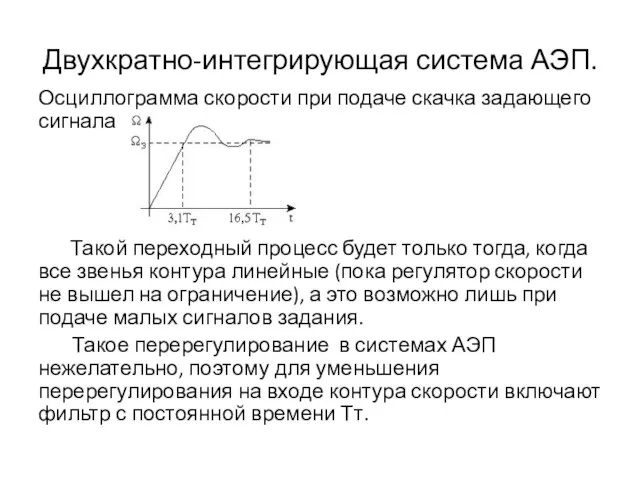
- 17. Однократно-интегрирующая система АЭП. Такой характер переходного процесса будет в том случае, если все звенья системы являются
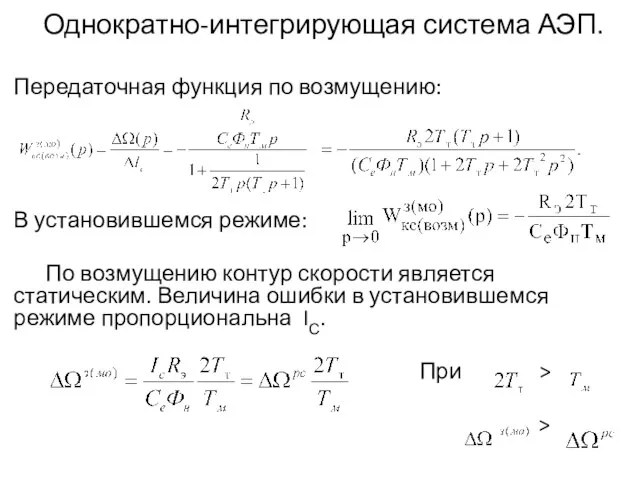
- 18. Однократно-интегрирующая система АЭП. Передаточная функция по возмущению: В установившемся режиме: По возмущению контур скорости является статическим.
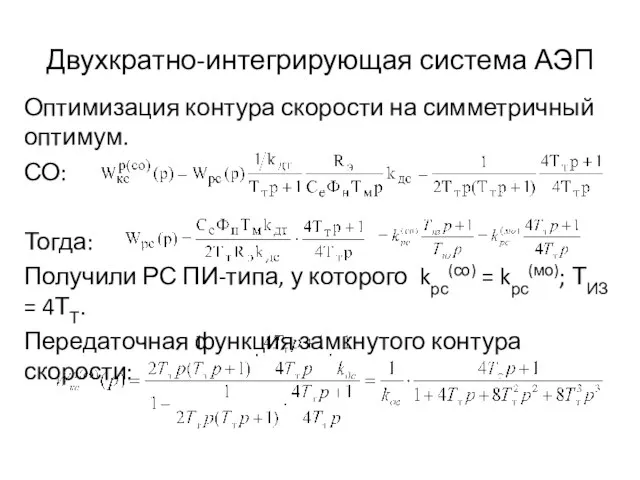
- 19. Двухкратно-интегрирующая система АЭП Оптимизация контура скорости на симметричный оптимум. СО: Тогда: Получили РС ПИ-типа, у которого
- 20. Двухкратно-интегрирующая система АЭП. Осциллограмма скорости при подаче скачка задающего сигнала Такой переходный процесс будет только тогда,
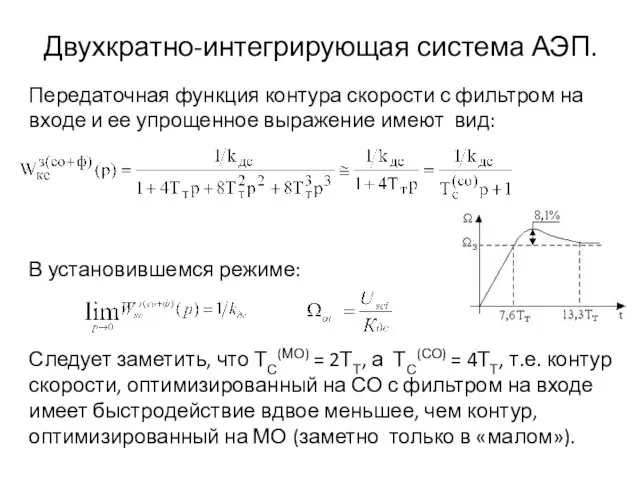
- 21. Двухкратно-интегрирующая система АЭП. Передаточная функция контура скорости с фильтром на входе и ее упрощенное выражение имеют
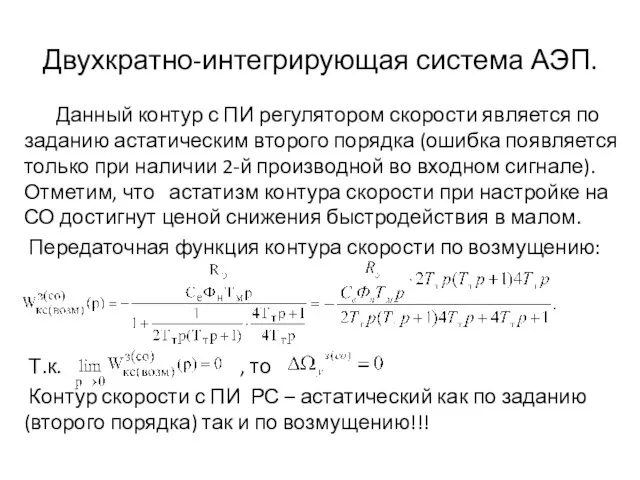
- 22. Двухкратно-интегрирующая система АЭП. Данный контур с ПИ регулятором скорости является по заданию астатическим второго порядка (ошибка
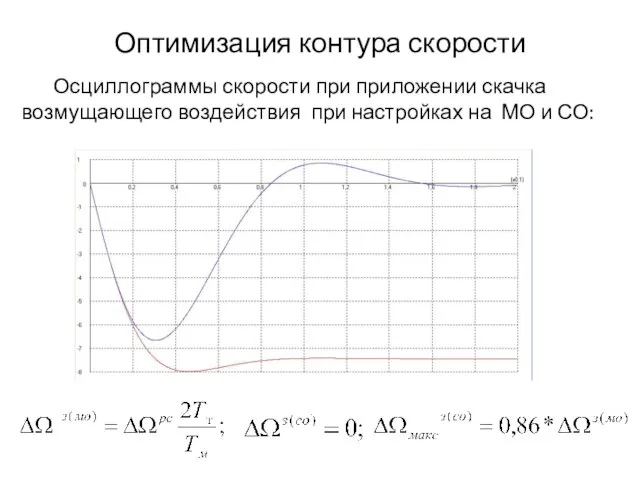
- 23. Оптимизация контура скорости Осциллограммы скорости при приложении скачка возмущающего воздействия при настройках на МО и СО:
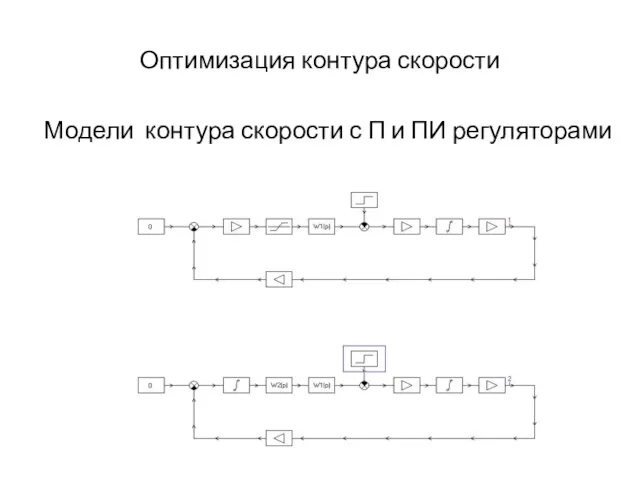
- 24. Оптимизация контура скорости Модели контура скорости с П и ПИ регуляторами
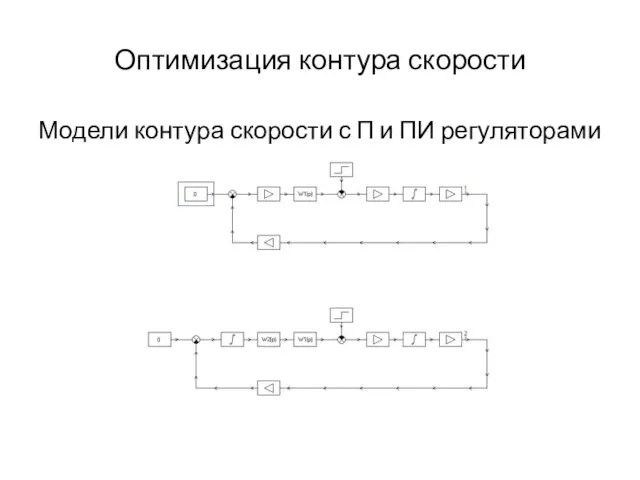
- 25. Оптимизация контура скорости Модели контура скорости с П и ПИ регуляторами
- 27. Скачать презентацию
Слайд 2Принципы построения многоконтурных систем АЭП
Многоконтурные АЭП с параллельными контурами регулирования с одним
Принципы построения многоконтурных систем АЭП
Многоконтурные АЭП с параллельными контурами регулирования с одним
Слайд 3Принципы построения многоконтурных систем АЭП
2. Многоконтурные системы с концентрическими контурами регулирования (последовательно
Принципы построения многоконтурных систем АЭП
2. Многоконтурные системы с концентрическими контурами регулирования (последовательно

Слайд 4Принципы построения многоконтурных систем АЭП
Достоинства:
- возможность реализации оптимальных законов управления каждым параметром
Принципы построения многоконтурных систем АЭП
Достоинства:
- возможность реализации оптимальных законов управления каждым параметром
Слайд 5
Однозонный АЭП с подчиненным регулированием параметров с обратной связью по скорости
Структурная схема.
При
Однозонный АЭП с подчиненным регулированием параметров с обратной связью по скорости
Структурная схема.
При
Слайд 6Оптимизация контуров регулирования
Оптимизация контура тока. Структурная схема контура тока.
Структурная схема контура тока
Оптимизация контуров регулирования
Оптимизация контура тока. Структурная схема контура тока.
Структурная схема контура тока
Слайд 7Оптимизация контура тока
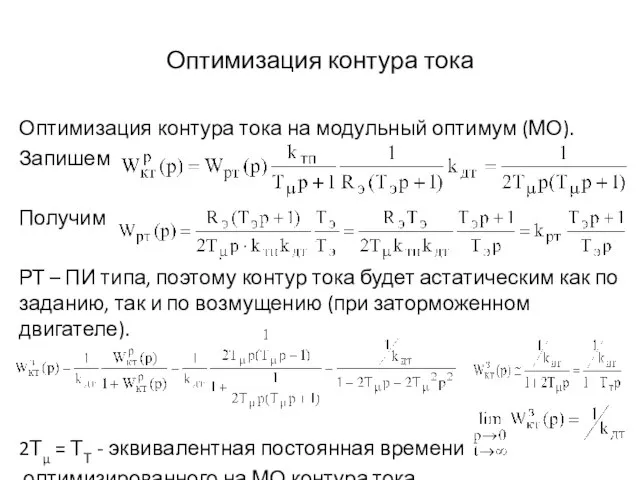
Оптимизация контура тока на модульный оптимум (МО).
Запишем
Получим
РТ – ПИ типа,
Оптимизация контура тока
Оптимизация контура тока на модульный оптимум (МО).
Запишем
Получим
РТ – ПИ типа,
Слайд 8Оптимизация контура тока
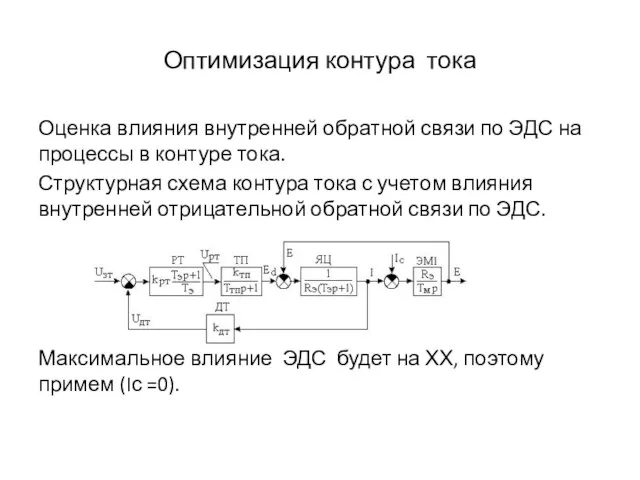
Оценка влияния внутренней обратной связи по ЭДС на процессы в
Оптимизация контура тока
Оценка влияния внутренней обратной связи по ЭДС на процессы в
Слайд 9Оптимизация контура тока
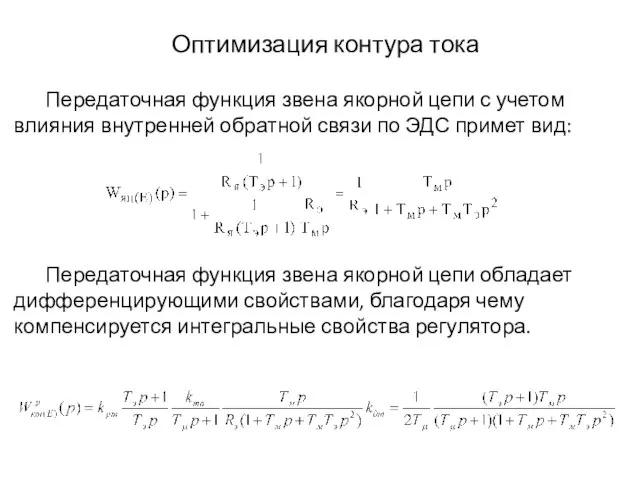
Передаточная функция звена якорной цепи с учетом влияния внутренней обратной
Оптимизация контура тока
Передаточная функция звена якорной цепи с учетом влияния внутренней обратной
Слайд 10Оптимизация контура тока
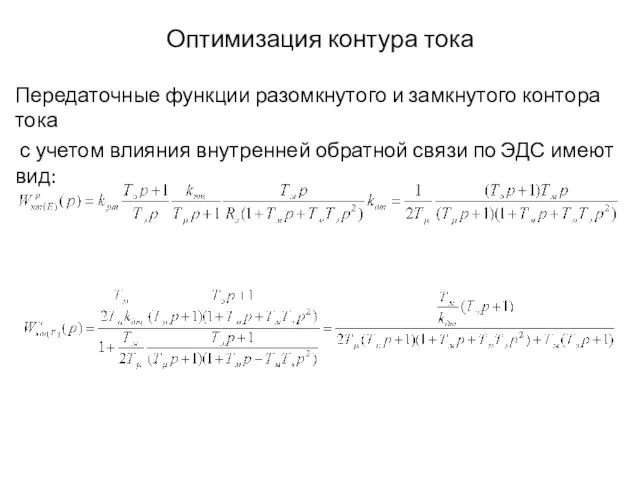
Передаточные функции разомкнутого и замкнутого контора тока
с учетом влияния
Оптимизация контура тока
Передаточные функции разомкнутого и замкнутого контора тока
с учетом влияния
Слайд 11Оптимизация контура тока
В установившемся режиме разгона-торможения двигателя на ХХ:
где IЗ – заданная
Оптимизация контура тока
В установившемся режиме разгона-торможения двигателя на ХХ:
где IЗ – заданная
Слайд 12Оптимизация контура тока
Другое следствие влияния ОС по ЭДС - это увеличенное
Оптимизация контура тока
Другое следствие влияния ОС по ЭДС - это увеличенное
Слайд 13Оптимизация контура тока
Осциллограммы тока при отработке скачка задающего сигнала при заторможенном двигателе
Оптимизация контура тока
Осциллограммы тока при отработке скачка задающего сигнала при заторможенном двигателе
Слайд 14Оптимизация контура тока
Если передаточная функция якорной цепи может быть представлена в виде
Оптимизация контура тока
Если передаточная функция якорной цепи может быть представлена в виде
Слайд 15Оптимизация контура скорости.
Структурная схема контура регулирования скорости
Возможны два варианта оптимизации:
- на МО(контур
Оптимизация контура скорости.
Структурная схема контура регулирования скорости
Возможны два варианта оптимизации:
- на МО(контур
Слайд 16Оптимизация контура скорости
Однократно-интегрирующая система АЭП.
МО:
С пропорциональным РС система АЭП будет астатической
Оптимизация контура скорости
Однократно-интегрирующая система АЭП.
МО:
С пропорциональным РС система АЭП будет астатической
Слайд 17Однократно-интегрирующая система АЭП.
Такой характер переходного процесса будет в том случае, если все
Однократно-интегрирующая система АЭП.
Такой характер переходного процесса будет в том случае, если все
Слайд 18Однократно-интегрирующая система АЭП.
Передаточная функция по возмущению:
В установившемся режиме:
По возмущению контур скорости является
Однократно-интегрирующая система АЭП.
Передаточная функция по возмущению:
В установившемся режиме:
По возмущению контур скорости является
Слайд 19Двухкратно-интегрирующая система АЭП
Оптимизация контура скорости на симметричный оптимум.
СО:
Тогда:
Получили РС ПИ-типа,
Двухкратно-интегрирующая система АЭП
Оптимизация контура скорости на симметричный оптимум.
СО:
Тогда:
Получили РС ПИ-типа,
Слайд 20Двухкратно-интегрирующая система АЭП.
Осциллограмма скорости при подаче скачка задающего сигнала
Такой переходный процесс
Двухкратно-интегрирующая система АЭП.
Осциллограмма скорости при подаче скачка задающего сигнала
Такой переходный процесс
Слайд 21Двухкратно-интегрирующая система АЭП.
Передаточная функция контура скорости с фильтром на входе и ее
Двухкратно-интегрирующая система АЭП.
Передаточная функция контура скорости с фильтром на входе и ее
Слайд 22Двухкратно-интегрирующая система АЭП.
Данный контур с ПИ регулятором скорости является по заданию астатическим
Двухкратно-интегрирующая система АЭП.
Данный контур с ПИ регулятором скорости является по заданию астатическим
Слайд 23Оптимизация контура скорости
Осциллограммы скорости при приложении скачка возмущающего воздействия при настройках на
Оптимизация контура скорости
Осциллограммы скорости при приложении скачка возмущающего воздействия при настройках на
Слайд 24Оптимизация контура скорости
Модели контура скорости с П и ПИ регуляторами
Оптимизация контура скорости
Модели контура скорости с П и ПИ регуляторами
Слайд 25Оптимизация контура скорости
Модели контура скорости с П и ПИ регуляторами
Оптимизация контура скорости
Модели контура скорости с П и ПИ регуляторами
 Авторское право. Общие положения
Авторское право. Общие положения «ПРАДЕДУШКА» БЕНЗИНА
«ПРАДЕДУШКА» БЕНЗИНА Inera – Leasing Lite Edition Лизинговое решение на платформе Dynamics AX
Inera – Leasing Lite Edition Лизинговое решение на платформе Dynamics AX Мемлекеттің саяси жүйесі Конституцияда нақты көрініс тапқан
Мемлекеттің саяси жүйесі Конституцияда нақты көрініс тапқан Презентация на тему Пейзаж в литературе, музыке и живописи
Презентация на тему Пейзаж в литературе, музыке и живописи Христианские и языческие мотивы в повестях Н.В. Гоголя
Христианские и языческие мотивы в повестях Н.В. Гоголя Періодичність тригонометричних функцій. Побудова графіків тригонометричних
Періодичність тригонометричних функцій. Побудова графіків тригонометричних Nobel_Prize_Winners_RAS
Nobel_Prize_Winners_RAS Урок 5 класс
Урок 5 класс Расценки
Расценки Табличный процессор EXCEL
Табличный процессор EXCEL Презентация на тему Природные зоны Африки
Презентация на тему Природные зоны Африки  Эконометрика и эконометрическое моделирование
Эконометрика и эконометрическое моделирование Все народы воспевают мудрость старости
Все народы воспевают мудрость старости Понятие информации. 10 класс
Понятие информации. 10 класс Відмінність тварин
Відмінність тварин Портфолио как форма оценки индивидуальных образовательных достижений обучающихся
Портфолио как форма оценки индивидуальных образовательных достижений обучающихся Разминирование железных дорог. Приемы обнаружения мин различными средствами поиска
Разминирование железных дорог. Приемы обнаружения мин различными средствами поиска Ключевые проекты и направления
Ключевые проекты и направления Яниславицкая культура в Белорусском Понеманье
Яниславицкая культура в Белорусском Понеманье Мониторинг качества образования в 2017-2018 учебном году
Мониторинг качества образования в 2017-2018 учебном году The early middle ages
The early middle ages Декабрь, 2011 год.
Декабрь, 2011 год. Золушка
Золушка Устройство компьютера
Устройство компьютера Key Exchange Solutions
Key Exchange Solutions Презентация на тему Большое путешествие на луну
Презентация на тему Большое путешествие на луну  Кейс – технологии и инфографика при подготовке к ЕГЭ по русскому языку
Кейс – технологии и инфографика при подготовке к ЕГЭ по русскому языку