- Универсальное цифровое устройство управления поворотом антенны RT-1

Содержание
- 2. Как управлять поворотом направленных антенн и как индицировать их положение? Сельсин датчик – сельсин приемник Набор
- 3. Устройство RT-1 – новое слово в технике управления вращающимися антеннами Новый принцип индикации и управления Переменный
- 4. Основные принципы индикации и управления Нажатие на кнопку с нужным азимутом Поворот по команде с компьютерного
- 5. Основные принципы индикации и управления Нажатие на кнопку с нужным азимутом Поворот по команде с компьютерного
- 6. Основные принципы индикации и управления Нажатие на кнопку с нужным азимутом Поворот по команде с компьютерного
- 7. Датчики и обработка сигнала Обычный переменный резистор в качестве датчика Угол поворота антенны более 360 градусов
- 8. Интеллектуальные функции Автоматическое определение оптимального направления вращения антенны Программные «концевые выключатели» Учет инерции системы Генерация сигнала
- 9. Автоматическая калибровка Калибровка нажатием двух кнопок: После входа в режим калибровки достаточно повернуть антенну на азимут
- 10. Управление несколькими антеннами До трех выходные блоков в одном устройстве Управление 3 антеннами по азимуту Автоматическое
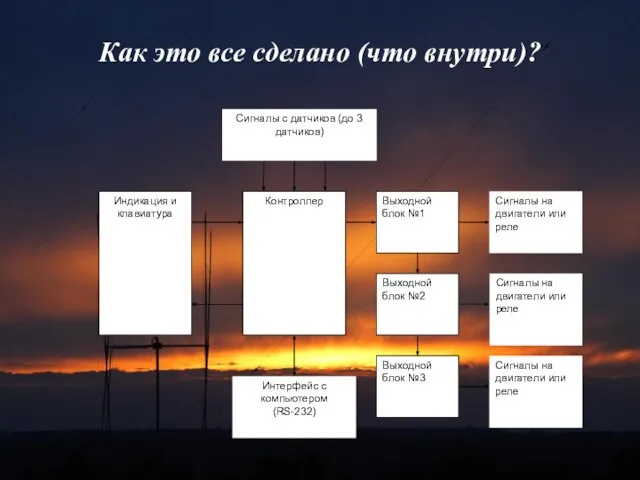
- 11. Как это все сделано (что внутри)?
- 12. Как это все сделано (что внутри)? Клавиатура и индикация
- 13. Как это все сделано (что внутри)? Плата контроллера Вся обработка данных и управление производится 16 битным
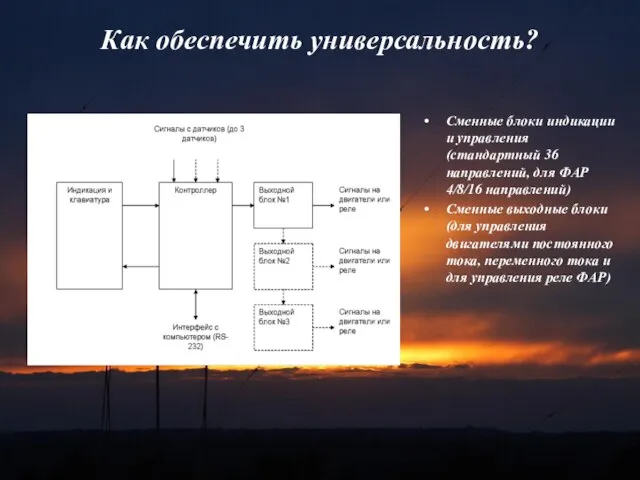
- 14. Как обеспечить универсальность? Сменные блоки индикации и управления (стандартный 36 направлений, для ФАР 4/8/16 направлений) Сменные
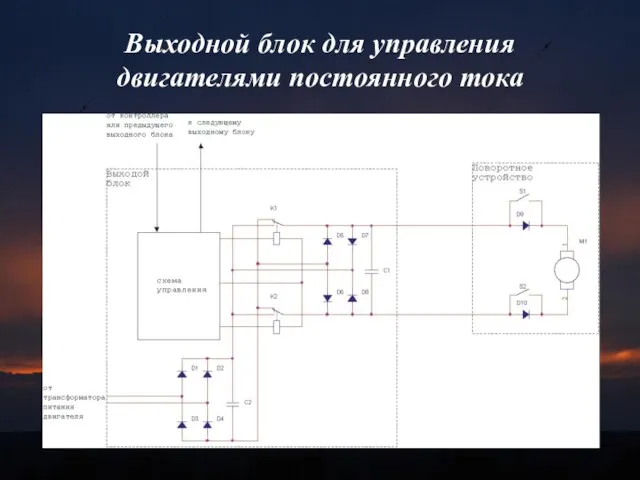
- 15. Выходной блок для управления двигателями постоянного тока
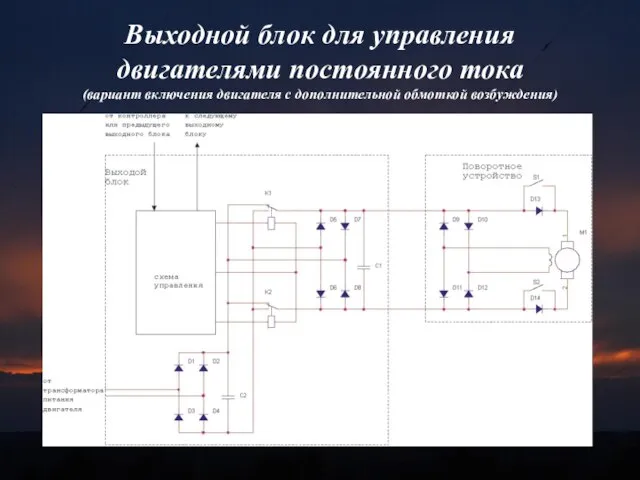
- 16. Выходной блок для управления двигателями постоянного тока (вариант включения двигателя с дополнительной обмоткой возбуждения)
- 17. Выходной блок для управления двигателями переменного тока
- 18. Не только поворотные антенны, но и ФАР Автоматический выбор направления (через компьютерный интерфейс) Упрощение схемы управления
- 20. Скачать презентацию
Слайд 3Устройство RT-1 – новое слово в технике управления вращающимися антеннами
Новый принцип индикации
Устройство RT-1 – новое слово в технике управления вращающимися антеннами
Новый принцип индикации

Слайд 4Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде
Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде

Слайд 5Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде
Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде

Слайд 6Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде
Основные принципы индикации и управления
Нажатие на кнопку с нужным азимутом
Поворот по команде

Слайд 7Датчики и обработка сигнала
Обычный переменный резистор в качестве датчика
Угол поворота антенны более
Датчики и обработка сигнала
Обычный переменный резистор в качестве датчика
Угол поворота антенны более
Слайд 8Интеллектуальные функции
Автоматическое определение оптимального направления вращения антенны
Программные «концевые выключатели»
Учет инерции системы
Генерация сигнала
Интеллектуальные функции
Автоматическое определение оптимального направления вращения антенны
Программные «концевые выключатели»
Учет инерции системы
Генерация сигнала
Слайд 9Автоматическая калибровка
Калибровка нажатием двух кнопок:
После входа в режим калибровки достаточно повернуть антенну
Автоматическая калибровка
Калибровка нажатием двух кнопок:
После входа в режим калибровки достаточно повернуть антенну
Слайд 10Управление несколькими антеннами
До трех выходные блоков в одном устройстве
Управление 3 антеннами по
Управление несколькими антеннами
До трех выходные блоков в одном устройстве
Управление 3 антеннами по
Слайд 11Как это все сделано (что внутри)?
Как это все сделано (что внутри)?
Слайд 12Как это все сделано (что внутри)?
Клавиатура и индикация
Как это все сделано (что внутри)?
Клавиатура и индикация

Слайд 13Как это все сделано (что внутри)?
Плата контроллера
Вся обработка данных и управление производится
Как это все сделано (что внутри)?
Плата контроллера
Вся обработка данных и управление производится

Слайд 14Как обеспечить универсальность?
Сменные блоки индикации и управления (стандартный 36 направлений, для ФАР
Как обеспечить универсальность?
Сменные блоки индикации и управления (стандартный 36 направлений, для ФАР
Слайд 15Выходной блок для управления двигателями постоянного тока
Выходной блок для управления двигателями постоянного тока
Слайд 16Выходной блок для управления двигателями постоянного тока
(вариант включения двигателя с дополнительной
Выходной блок для управления двигателями постоянного тока (вариант включения двигателя с дополнительной
Слайд 17Выходной блок для управления двигателями переменного тока
Выходной блок для управления двигателями переменного тока

Слайд 18Не только поворотные антенны, но и ФАР
Автоматический выбор направления (через компьютерный интерфейс)
Упрощение
Не только поворотные антенны, но и ФАР
Автоматический выбор направления (через компьютерный интерфейс)
Упрощение

 События в мире и в Беларуси
События в мире и в Беларуси Тренинг. Суперэнергетика 2.0
Тренинг. Суперэнергетика 2.0 Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса
Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко
Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ
Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ Я и мой ребёнок
Я и мой ребёнок Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин
Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин Гениальность По Заказу – Управление Творческими Процессами
Гениальность По Заказу – Управление Творческими Процессами Фасадные материалы
Фасадные материалы Проект информатизации образовательного учреждения
Проект информатизации образовательного учреждения Пойте вместе с нами. Шпаргалка для родителей
Пойте вместе с нами. Шпаргалка для родителей Электромагнит, электронное реле и герконы
Электромагнит, электронное реле и герконы Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае
Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае Виды грибов (1 класс)
Виды грибов (1 класс) Лёгкая атлетика
Лёгкая атлетика День матери
День матери Основные и составные цвета
Основные и составные цвета Сварочный пост и инструмент для сварщика
Сварочный пост и инструмент для сварщика Классификация повреждений деревянных строительных конструкций
Классификация повреждений деревянных строительных конструкций Научные статьи
Научные статьи Технология обработки конструкционных материалов резанием
Технология обработки конструкционных материалов резанием  Легенды
Легенды Нижний Тагил. Спутник
Нижний Тагил. Спутник Рекламная кампания
Рекламная кампания План по продвижению магазина
План по продвижению магазина Хрестики-нулики
Хрестики-нулики Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р
Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р Презентация на тему Михаил Михайлович Сперанский
Презентация на тему Михаил Михайлович Сперанский