- Электрические машины. Вращающееся магнитное поле. Трехфазные асинхронные двигатели

Содержание
- 2. Напоминание: достоинства и недостатки МПТ Достоинства: Имеют большой диапазон мощностей (1 мкВт – десятки кВт) Обладают
- 3. Что нужно, чтобы сделать двигатель без щеточно-коллекторного узла? Закон Ампера: чтобы получить усилие (и момент), необходимо
- 4. Для работы двигателей переменного тока необходимо не просто переменное магнитное поле, а вращающееся магнитное поле постоянной
- 5. Перед тем, как описать статор, остановимся на некоторых базовых принципах создания вращающегося магнитного поля. Для создания
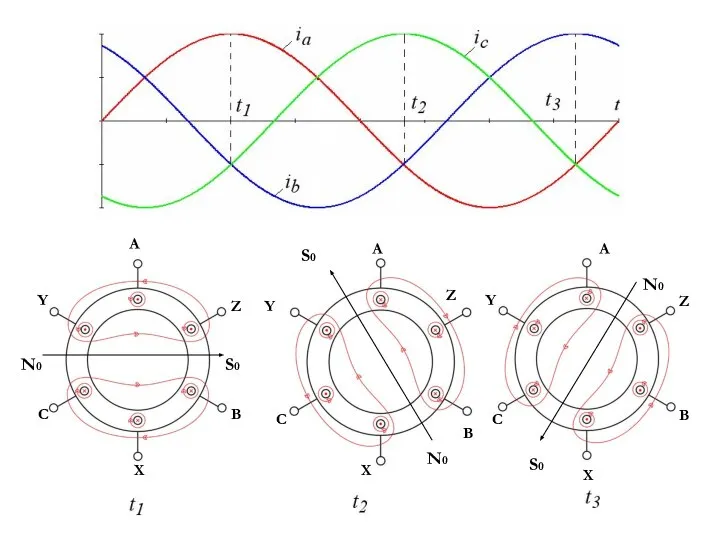
- 6. Рассмотрим как меняется результирующее магнитное поле двух катушек t1 = 0 t2 = T/8 t3 =
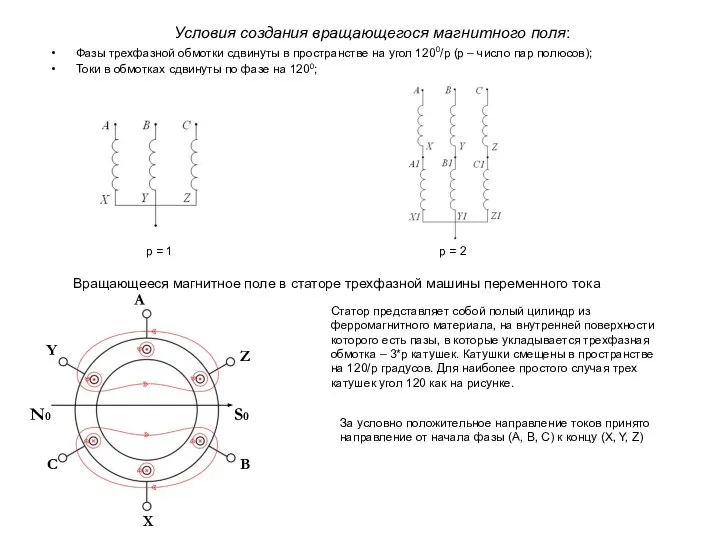
- 7. Условия создания вращающегося магнитного поля: Фазы трехфазной обмотки сдвинуты в пространстве на угол 1200/р (р –
- 8. N0 S0 N0 S0 N0 S0 A X B Y C Z A X B Y
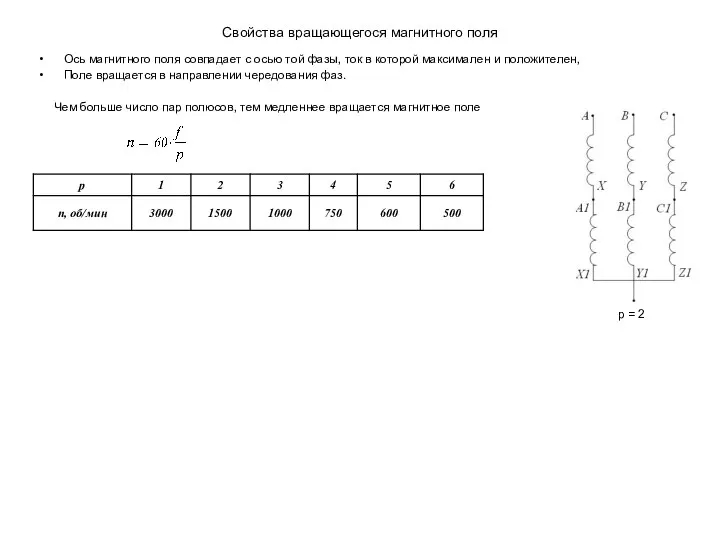
- 9. Свойства вращающегося магнитного поля Ось магнитного поля совпадает с осью той фазы, ток в которой максимален
- 10. РАЗДЕЛ 3 ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
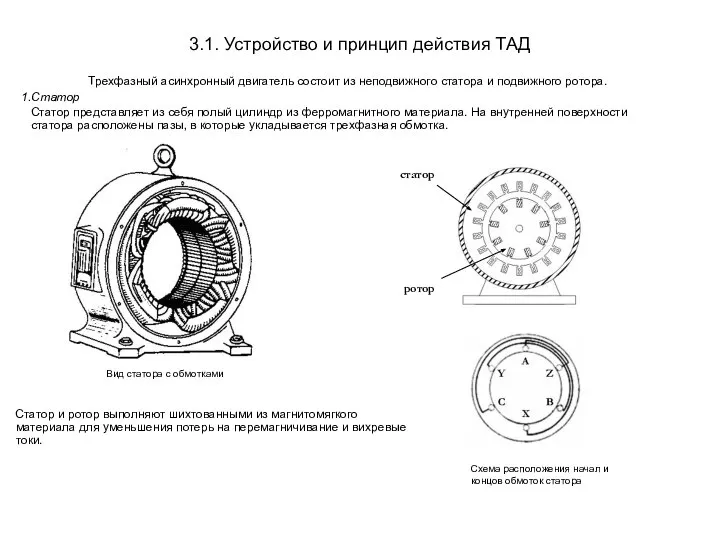
- 11. 3.1. Устройство и принцип действия ТАД Трехфазный асинхронный двигатель состоит из неподвижного статора и подвижного ротора.
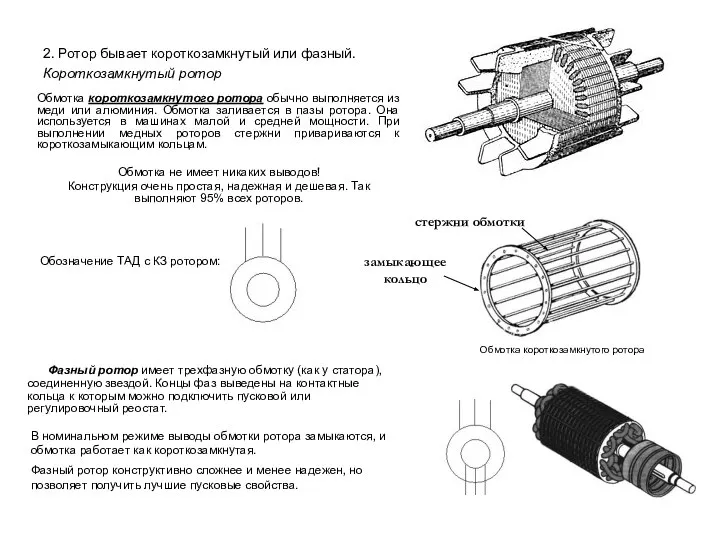
- 12. 2. Ротор бывает короткозамкнутый или фазный. Короткозамкнутый ротор стержни обмотки замыкающее кольцо Обмотка короткозамкнутого ротора Обмотка
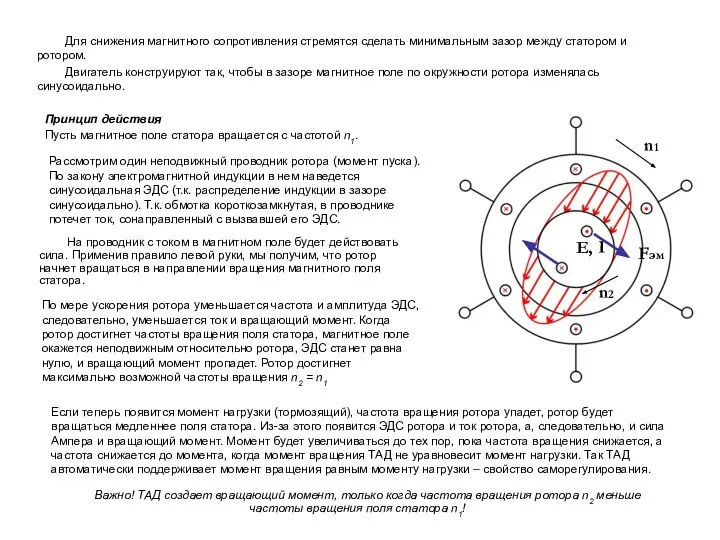
- 13. Принцип действия Пусть магнитное поле статора вращается с частотой n1. Рассмотрим один неподвижный проводник ротора (момент
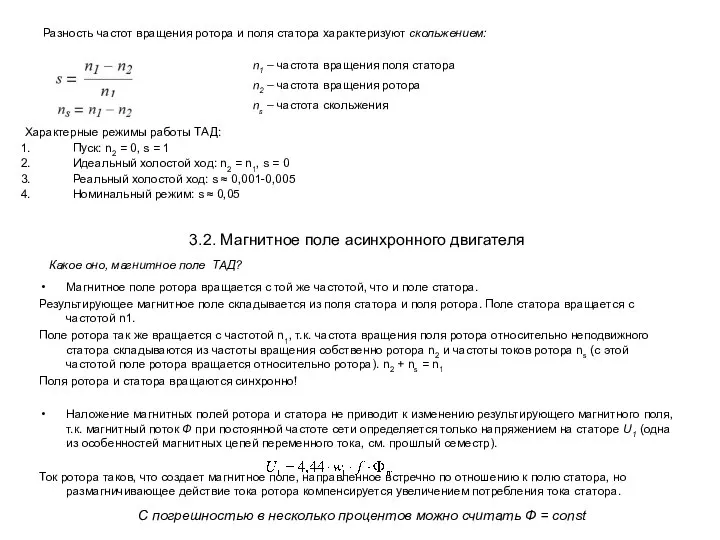
- 14. Разность частот вращения ротора и поля статора характеризуют скольжением: n1 – частота вращения поля статора n2
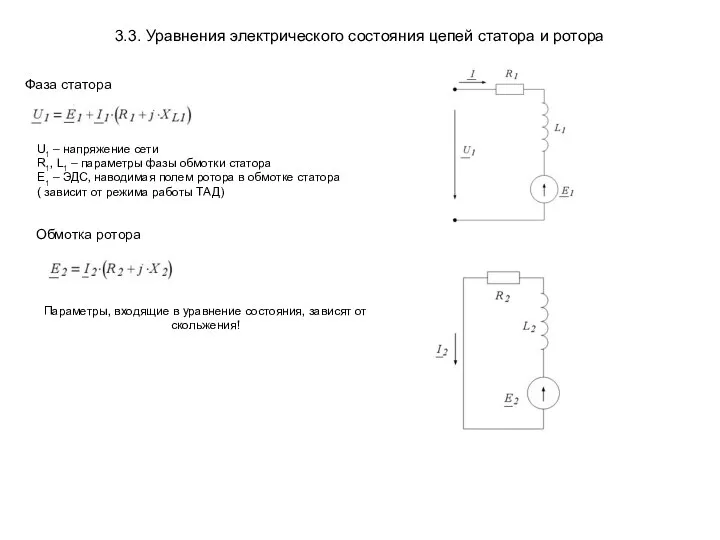
- 15. 3.3. Уравнения электрического состояния цепей статора и ротора Фаза статора U1 – напряжение сети R1, L1
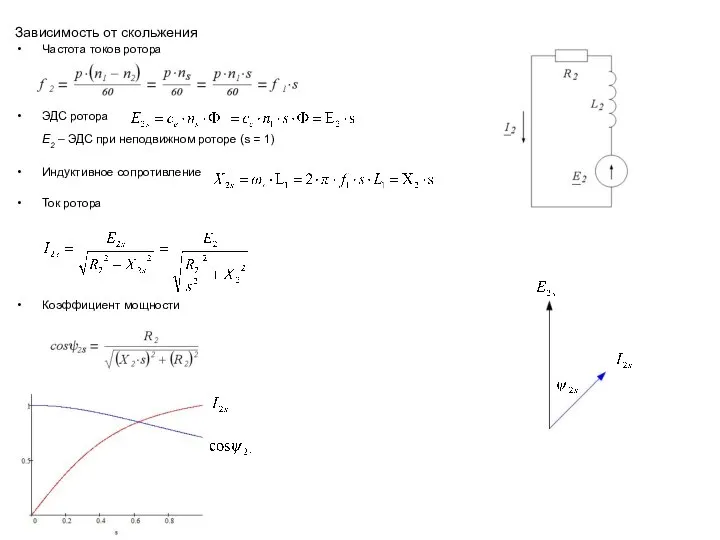
- 16. Зависимость от скольжения Частота токов ротора ЭДС ротора Е2 – ЭДС при неподвижном роторе (s =
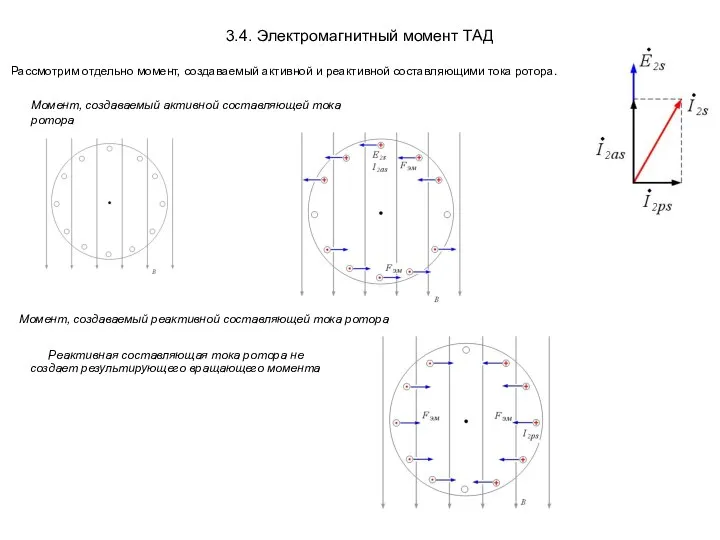
- 17. 3.4. Электромагнитный момент ТАД Рассмотрим отдельно момент, создаваемый активной и реактивной составляющими тока ротора. Момент, создаваемый
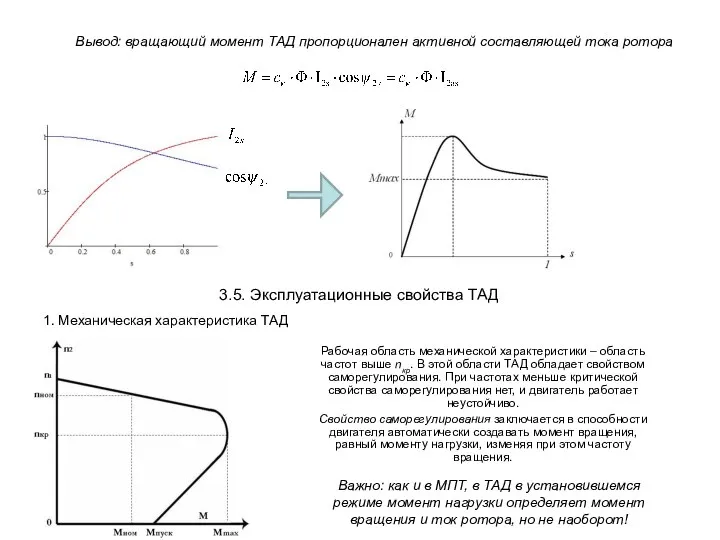
- 18. Вывод: вращающий момент ТАД пропорционален активной составляющей тока ротора 3.5. Эксплуатационные свойства ТАД 1. Механическая характеристика
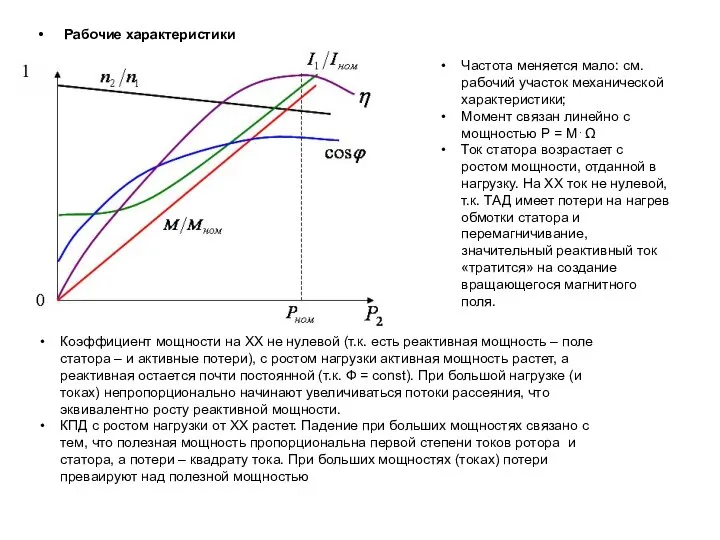
- 19. Рабочие характеристики Частота меняется мало: см. рабочий участок механической характеристики; Момент связан линейно с мощностью P
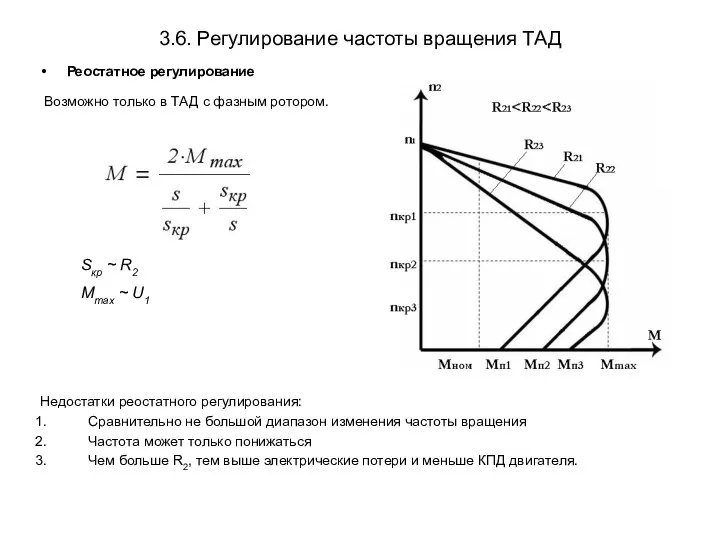
- 20. 3.6. Регулирование частоты вращения ТАД Реостатное регулирование Возможно только в ТАД с фазным ротором. Sкр ~
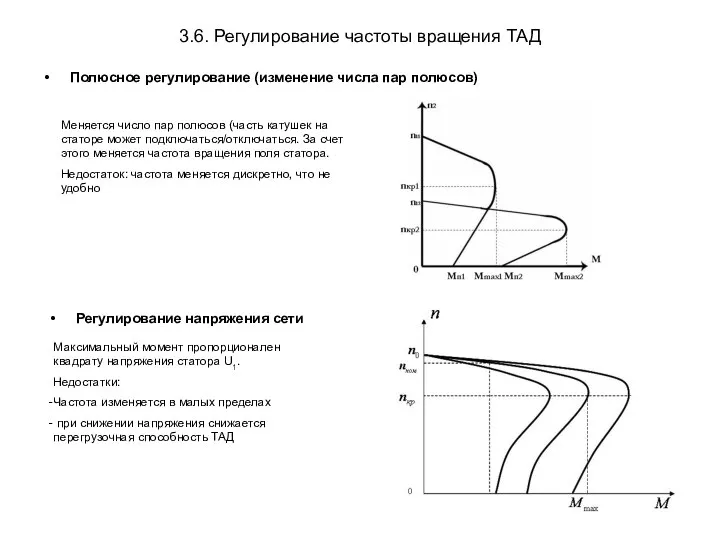
- 21. 3.6. Регулирование частоты вращения ТАД Полюсное регулирование (изменение числа пар полюсов) Меняется число пар полюсов (часть
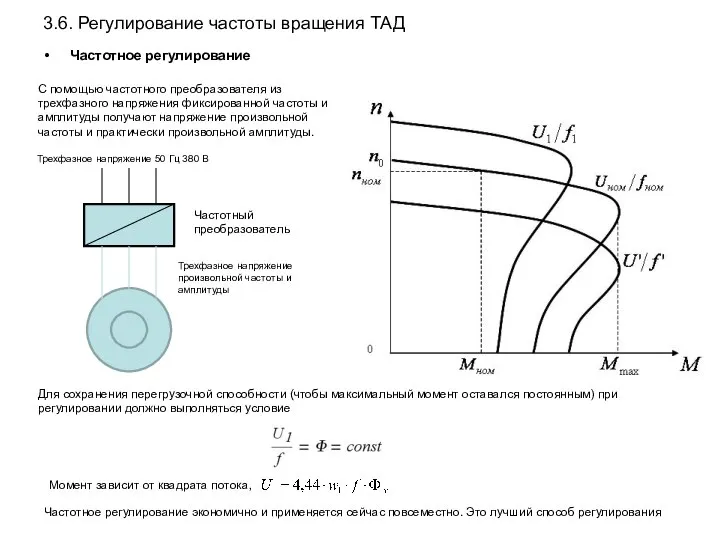
- 22. 3.6. Регулирование частоты вращения ТАД Частотное регулирование С помощью частотного преобразователя из трехфазного напряжения фиксированной частоты
- 23. Частотный преобразователь
- 24. 3.7. Пуск ТАД ТАД малой мощности включаются напрямую; ТАД большой мощности требуют ограничения пускового тока. ТАДу
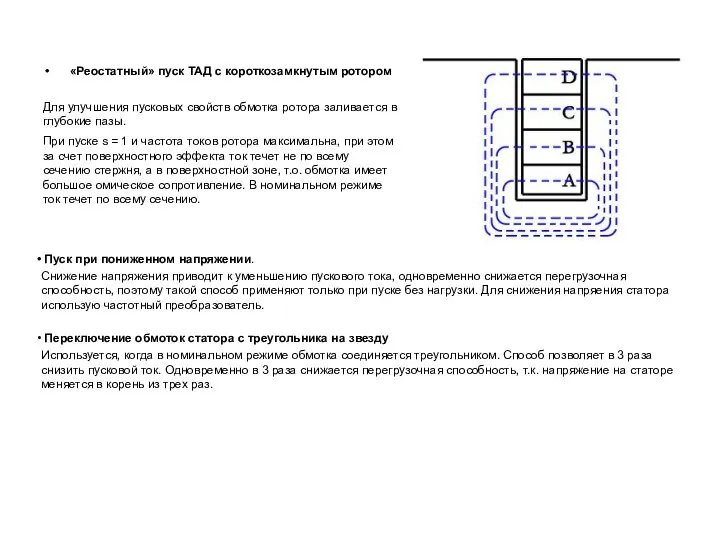
- 25. «Реостатный» пуск ТАД с короткозамкнутым ротором Для улучшения пусковых свойств обмотка ротора заливается в глубокие пазы.
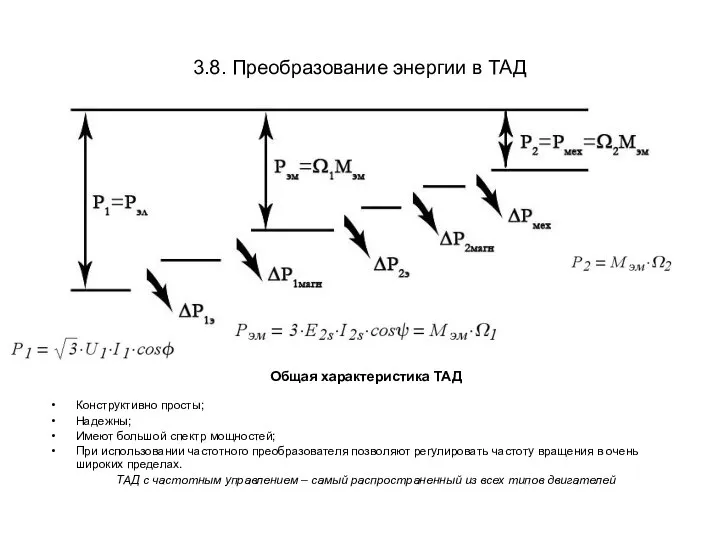
- 26. 3.8. Преобразование энергии в ТАД Общая характеристика ТАД Конструктивно просты; Надежны; Имеют большой спектр мощностей; При
- 27. Общая характеристика ТАД Конструктивно просты; Надежны; Имеют большой спектр мощностей; При использовании частотного преобразователя позволяют регулировать
- 28. Задача 1 ТАД с фазным ротором рассчитан для работы от сети 220/380 В и имеет следующие
- 29. Определить для пускового режима: момент, пусковой ток. Определить параметры критической точки, приняв sкр = 2∙sном. Построить
- 30. Задача 2 Найти сопротивление резистора, включенного в фазу обмотки ротора для снижения частоты вращения двигателя до
- 32. Скачать презентацию
Слайд 2Напоминание: достоинства и недостатки МПТ
Достоинства:
Имеют большой диапазон мощностей (1 мкВт – десятки
Напоминание: достоинства и недостатки МПТ
Достоинства:
Имеют большой диапазон мощностей (1 мкВт – десятки

Слайд 3Что нужно, чтобы сделать двигатель без щеточно-коллекторного узла?
Закон Ампера: чтобы получить усилие
Что нужно, чтобы сделать двигатель без щеточно-коллекторного узла?
Закон Ампера: чтобы получить усилие
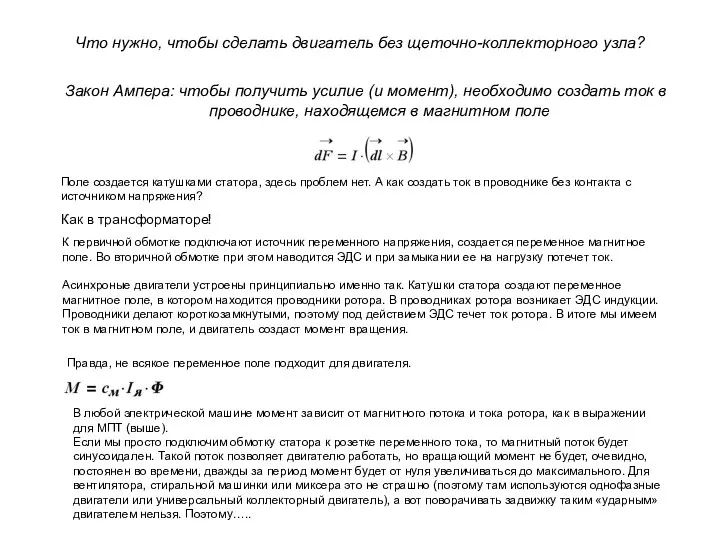
Слайд 4Для работы двигателей переменного тока необходимо не просто переменное магнитное поле, а
Для работы двигателей переменного тока необходимо не просто переменное магнитное поле, а
Слайд 5Перед тем, как описать статор, остановимся на некоторых базовых принципах создания вращающегося
Перед тем, как описать статор, остановимся на некоторых базовых принципах создания вращающегося
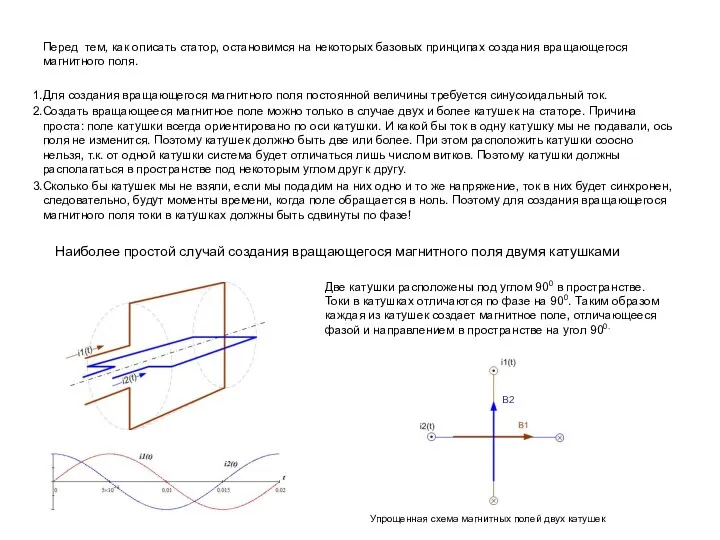
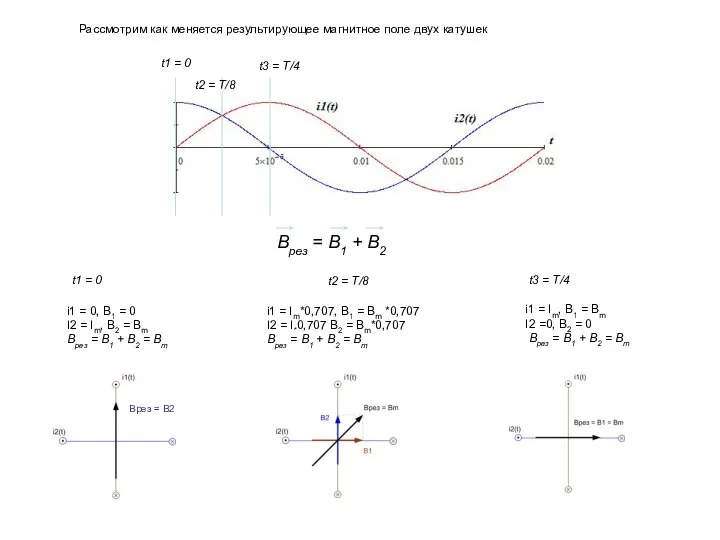
Слайд 6Рассмотрим как меняется результирующее магнитное поле двух катушек
t1 = 0
t2 = T/8
t3
Рассмотрим как меняется результирующее магнитное поле двух катушек
t1 = 0
t2 = T/8
t3
Слайд 7Условия создания вращающегося магнитного поля:
Фазы трехфазной обмотки сдвинуты в пространстве на угол
Условия создания вращающегося магнитного поля:
Фазы трехфазной обмотки сдвинуты в пространстве на угол
Слайд 8N0
S0
N0
S0
N0
S0
A
X
B
Y
C
Z
A
X
B
Y
C
Z
A
X
B
Y
C
Z
N0
S0
N0
S0
N0
S0
A
X
B
Y
C
Z
A
X
B
Y
C
Z
A
X
B
Y
C
Z
Слайд 9Свойства вращающегося магнитного поля
Ось магнитного поля совпадает с осью той фазы, ток
Свойства вращающегося магнитного поля
Ось магнитного поля совпадает с осью той фазы, ток
Слайд 10РАЗДЕЛ 3
ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
РАЗДЕЛ 3
ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Слайд 113.1. Устройство и принцип действия ТАД
Трехфазный асинхронный двигатель состоит из неподвижного статора
3.1. Устройство и принцип действия ТАД
Трехфазный асинхронный двигатель состоит из неподвижного статора
Слайд 122. Ротор бывает короткозамкнутый или фазный.
Короткозамкнутый ротор
стержни обмотки
замыкающее
кольцо
Обмотка короткозамкнутого ротора
Обмотка короткозамкнутого ротора
2. Ротор бывает короткозамкнутый или фазный.
Короткозамкнутый ротор
стержни обмотки
замыкающее
кольцо
Обмотка короткозамкнутого ротора
Обмотка короткозамкнутого ротора
Слайд 13Принцип действия
Пусть магнитное поле статора вращается с частотой n1.
Рассмотрим один неподвижный проводник
Принцип действия
Пусть магнитное поле статора вращается с частотой n1.
Рассмотрим один неподвижный проводник
Слайд 14Разность частот вращения ротора и поля статора характеризуют скольжением:
n1 – частота вращения
Разность частот вращения ротора и поля статора характеризуют скольжением:
n1 – частота вращения
Слайд 153.3. Уравнения электрического состояния цепей статора и ротора
Фаза статора
U1 – напряжение сети
R1,
3.3. Уравнения электрического состояния цепей статора и ротора
Фаза статора
U1 – напряжение сети
R1,
Слайд 16Зависимость от скольжения
Частота токов ротора
ЭДС ротора
Е2 – ЭДС при неподвижном роторе (s
Зависимость от скольжения
Частота токов ротора
ЭДС ротора
Е2 – ЭДС при неподвижном роторе (s
Слайд 173.4. Электромагнитный момент ТАД
Рассмотрим отдельно момент, создаваемый активной и реактивной составляющими тока
3.4. Электромагнитный момент ТАД
Рассмотрим отдельно момент, создаваемый активной и реактивной составляющими тока
Слайд 18Вывод: вращающий момент ТАД пропорционален активной составляющей тока ротора
3.5. Эксплуатационные свойства ТАД
1.
Вывод: вращающий момент ТАД пропорционален активной составляющей тока ротора
3.5. Эксплуатационные свойства ТАД
1.
Слайд 19Рабочие характеристики
Частота меняется мало: см. рабочий участок механической характеристики;
Момент связан линейно с
Рабочие характеристики
Частота меняется мало: см. рабочий участок механической характеристики;
Момент связан линейно с
Слайд 203.6. Регулирование частоты вращения ТАД
Реостатное регулирование
Возможно только в ТАД с фазным ротором.
Sкр
3.6. Регулирование частоты вращения ТАД
Реостатное регулирование
Возможно только в ТАД с фазным ротором.
Sкр
Слайд 213.6. Регулирование частоты вращения ТАД
Полюсное регулирование (изменение числа пар полюсов)
Меняется число пар
3.6. Регулирование частоты вращения ТАД
Полюсное регулирование (изменение числа пар полюсов)
Меняется число пар
Слайд 223.6. Регулирование частоты вращения ТАД
Частотное регулирование
С помощью частотного преобразователя из трехфазного напряжения
3.6. Регулирование частоты вращения ТАД
Частотное регулирование
С помощью частотного преобразователя из трехфазного напряжения
Слайд 23Частотный преобразователь
Частотный преобразователь

Слайд 243.7. Пуск ТАД
ТАД малой мощности включаются напрямую;
ТАД большой мощности требуют ограничения пускового
3.7. Пуск ТАД
ТАД малой мощности включаются напрямую;
ТАД большой мощности требуют ограничения пускового
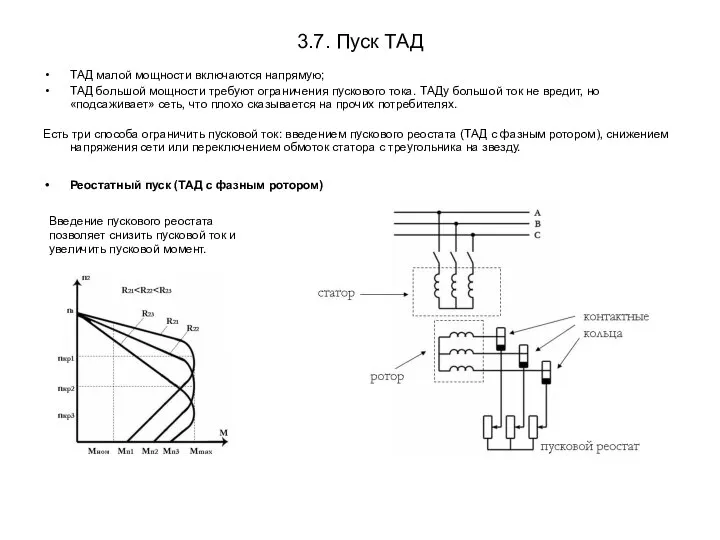
Слайд 25«Реостатный» пуск ТАД с короткозамкнутым ротором
Для улучшения пусковых свойств обмотка ротора заливается
«Реостатный» пуск ТАД с короткозамкнутым ротором
Для улучшения пусковых свойств обмотка ротора заливается
Слайд 263.8. Преобразование энергии в ТАД
Общая характеристика ТАД
Конструктивно просты;
Надежны;
Имеют большой спектр мощностей;
При использовании
3.8. Преобразование энергии в ТАД
Общая характеристика ТАД
Конструктивно просты;
Надежны;
Имеют большой спектр мощностей;
При использовании
Слайд 27Общая характеристика ТАД
Конструктивно просты;
Надежны;
Имеют большой спектр мощностей;
При использовании частотного преобразователя позволяют регулировать
Общая характеристика ТАД
Конструктивно просты;
Надежны;
Имеют большой спектр мощностей;
При использовании частотного преобразователя позволяют регулировать
Слайд 28Задача 1
ТАД с фазным ротором рассчитан для работы от сети 220/380 В
Задача 1
ТАД с фазным ротором рассчитан для работы от сети 220/380 В
Слайд 29Определить для пускового режима: момент, пусковой ток.
Определить параметры критической точки, приняв sкр
Определить для пускового режима: момент, пусковой ток.
Определить параметры критической точки, приняв sкр
Слайд 30Задача 2
Найти сопротивление резистора, включенного в фазу обмотки ротора для снижения частоты
Задача 2
Найти сопротивление резистора, включенного в фазу обмотки ротора для снижения частоты
 Характеристики электрического поля. Конденсаторы
Характеристики электрического поля. Конденсаторы Анализ видов и кинематических параметров движений
Анализ видов и кинематических параметров движений Средства измерений и их основные элементы
Средства измерений и их основные элементы Динамика. Законы Ньютона
Динамика. Законы Ньютона Закрепление по теме Плотность
Закрепление по теме Плотность Электромагнетизм в мирных и военных целях
Электромагнетизм в мирных и военных целях Радиоуглеродный анализ. Естественные науки в помощь гуманитарным
Радиоуглеродный анализ. Естественные науки в помощь гуманитарным Презентация на тему Броуновское движение
Презентация на тему Броуновское движение  Презентация на тему Испарение. Насыщенный и ненасыщенный пар
Презентация на тему Испарение. Насыщенный и ненасыщенный пар  Исследование возникновения и развития скольжения в поликристаллических образцах алюминия с помощью лазерной методики
Исследование возникновения и развития скольжения в поликристаллических образцах алюминия с помощью лазерной методики Вода, вода, кругом вода
Вода, вода, кругом вода Первичные и вторичные параметры длинной линии. Лекция Д1
Первичные и вторичные параметры длинной линии. Лекция Д1 Инерциальные системы отсчета. Первый закон Ньютона
Инерциальные системы отсчета. Первый закон Ньютона Уравновешивание восьмицилиндровых двигателей
Уравновешивание восьмицилиндровых двигателей Превращения энергии при колебаниях. Затухающие и вынужденные колебания
Превращения энергии при колебаниях. Затухающие и вынужденные колебания Движение и взаимодействие тел. 7 класс
Движение и взаимодействие тел. 7 класс Производная в физике и технике
Производная в физике и технике Техническая механика. Раздел: Теоретическая механика. Лекция 1
Техническая механика. Раздел: Теоретическая механика. Лекция 1 Определить импульс фотона с энергией
Определить импульс фотона с энергией lektsia
lektsia Дисперсия света
Дисперсия света Молния
Молния Сила трения
Сила трения Законы сохранения энергии и импульса
Законы сохранения энергии и импульса Графическое представление движения
Графическое представление движения Взаимодействие. Законы Ньютона
Взаимодействие. Законы Ньютона Почему луна не падает на землю, а земля на солнце
Почему луна не падает на землю, а земля на солнце Резонанс механических колебаний
Резонанс механических колебаний