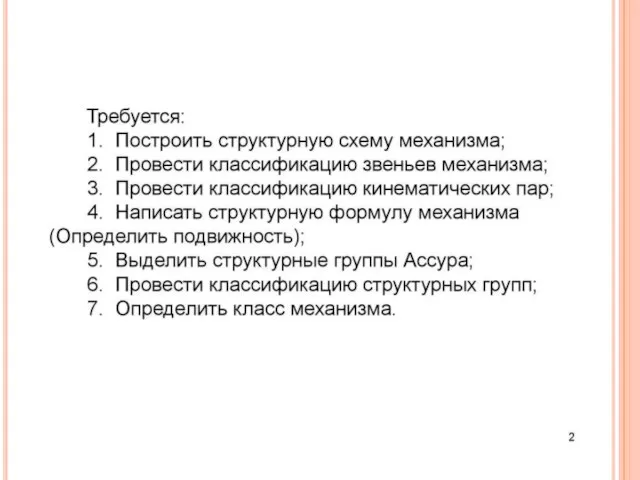
- Механика. Теория механизмов и машин. Общие понятия. Структурный анализ по Л. В. Ассура

Содержание
- 2. ТЕОРИЯ МЕХАНИЗМОВ И МАШИН - это наука о строении, кинематике, динамике механизмов и машин при их
- 3. Особенности дисциплины В отличие от специальных дисциплин, в которых изучаются реальные машины и механизмы, в ТММ
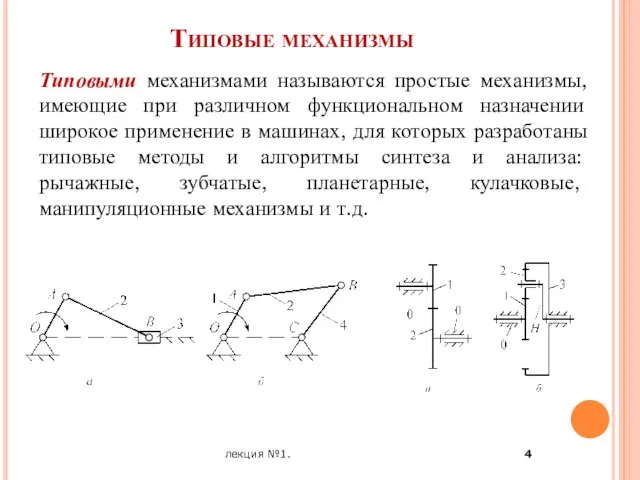
- 4. Типовые механизмы Типовыми механизмами называются простые механизмы, имеющие при различном функциональном назначении широкое применение в машинах,
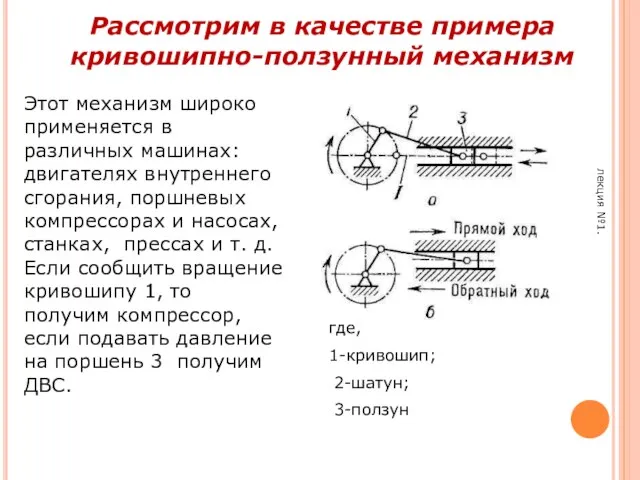
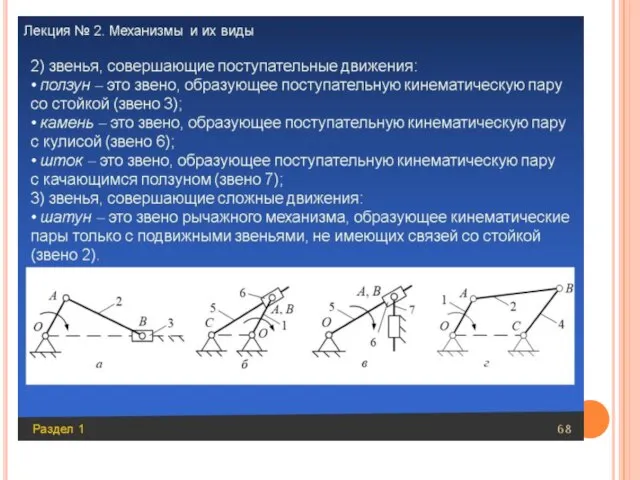
- 5. лекция №1. Рассмотрим в качестве примера кривошипно-ползунный механизм где, 1-кривошип; 2-шатун; 3-ползун Этот механизм широко применяется
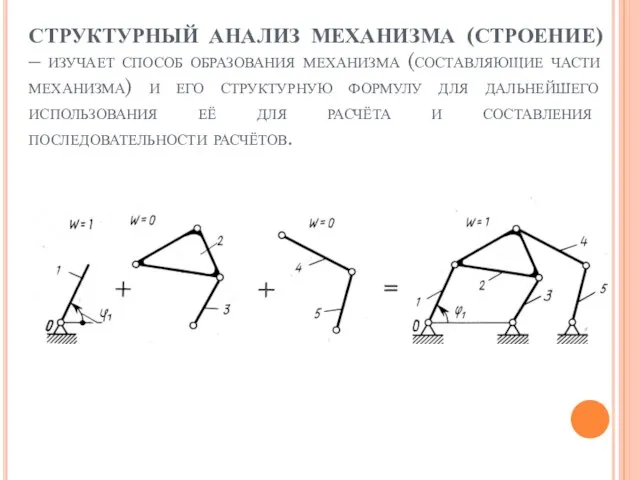
- 7. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА (СТРОЕНИЕ) – изучает способ образования механизма (составляющие части механизма) и его структурную формулу
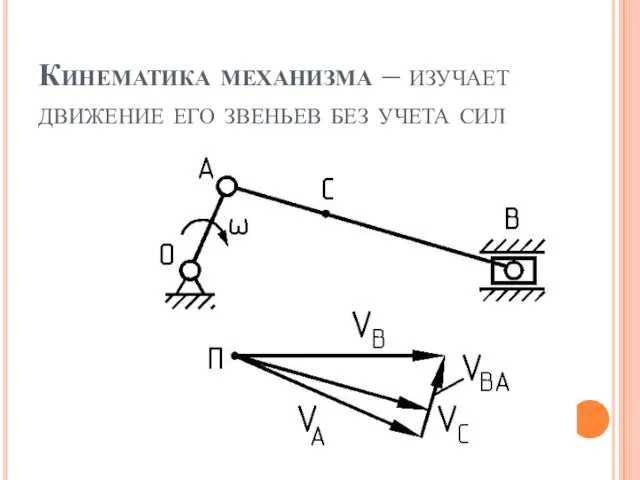
- 8. Кинематика механизма – изучает движение его звеньев без учета сил
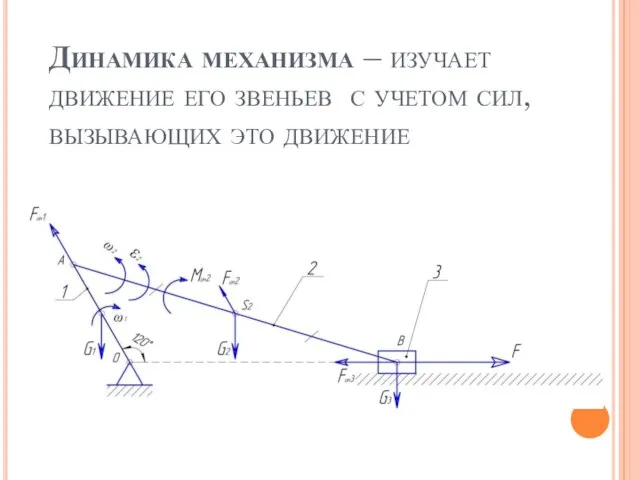
- 9. Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих это движение
- 10. Анализ – определение свойств (параметров) известного механизма
- 11. Синтез – создание нового механизма с заданными свойствами (параметрами)
- 12. Машина - это устройство, которое предназначено для преобразования энергии, материалов, информации для облегчения труда человека
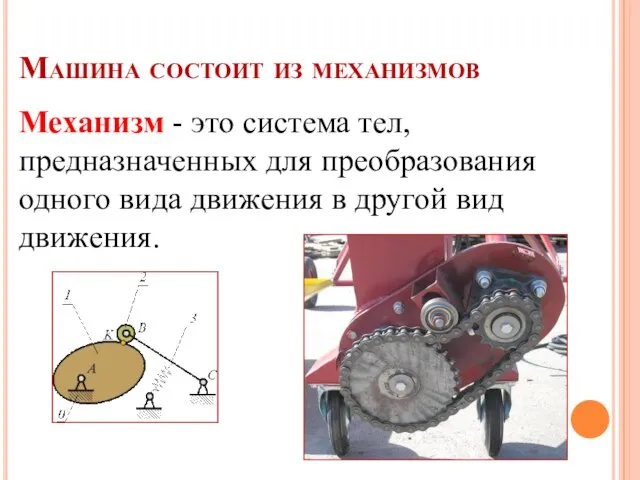
- 13. Машина состоит из механизмов Механизм - это система тел, предназначенных для преобразования одного вида движения в
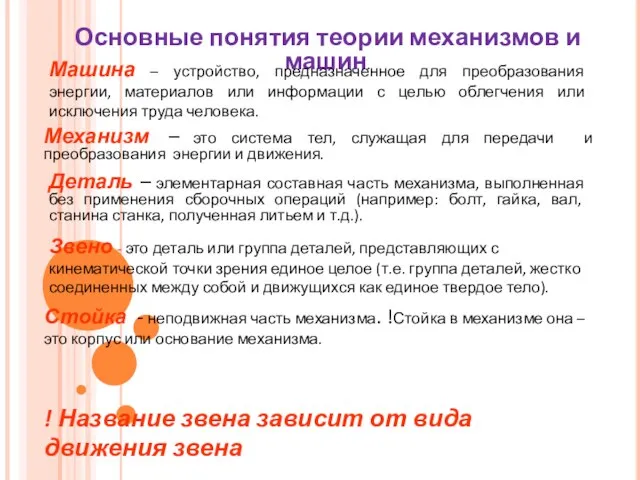
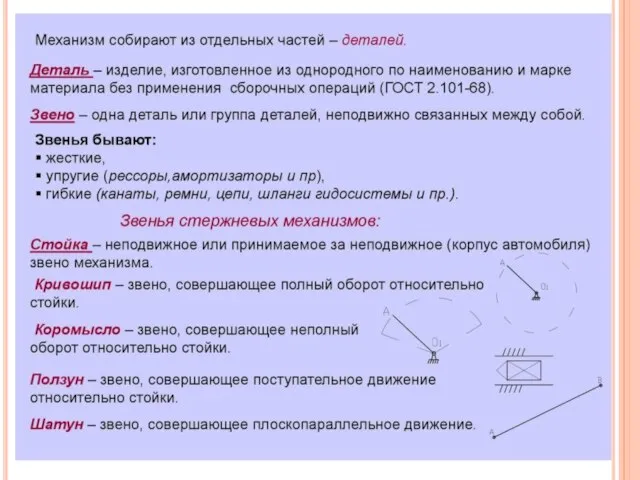
- 14. Основные понятия теории механизмов и машин. Машина – устройство, предназначенное для преобразования энергии, материалов или информации
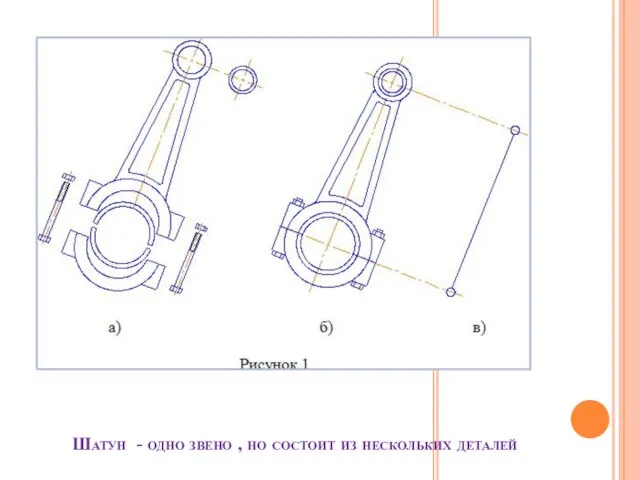
- 15. Шатун - одно звено , но состоит из нескольких деталей
- 21. Звенья в механизме соединяются между собой подвижным соединением, которое называется кинематической парой
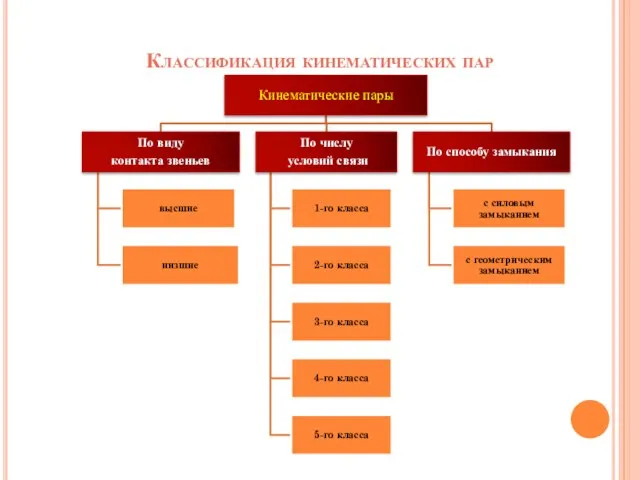
- 22. Классификация кинематических пар
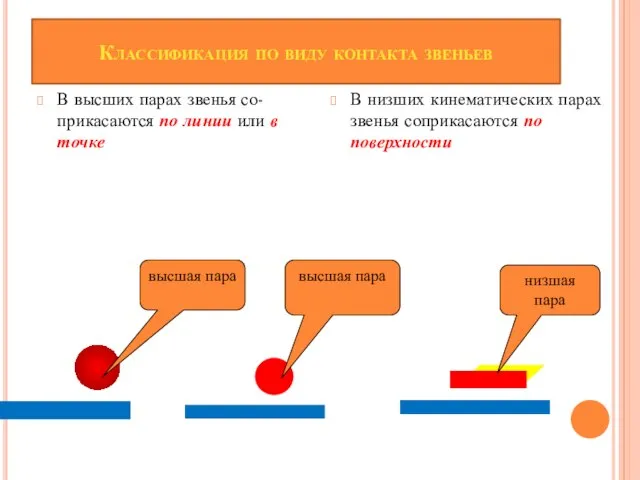
- 23. Классификация по виду контакта звеньев В высших парах звенья со-прикасаются по линии или в точке В
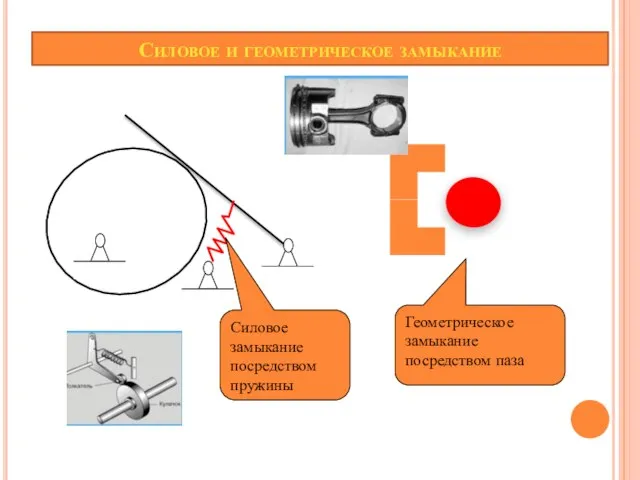
- 24. Силовое и геометрическое замыкание Силовое замыкание посредством пружины Геометрическое замыкание посредством паза
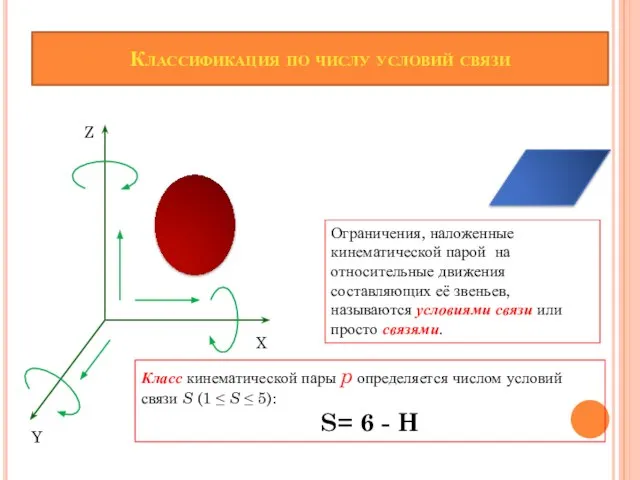
- 25. Степень подвижности свободного тела в пространстве Н = 6
- 26. Классификация по числу условий связи Z X Y Ограничения, наложенные кинематической парой на относительные движения составляющих
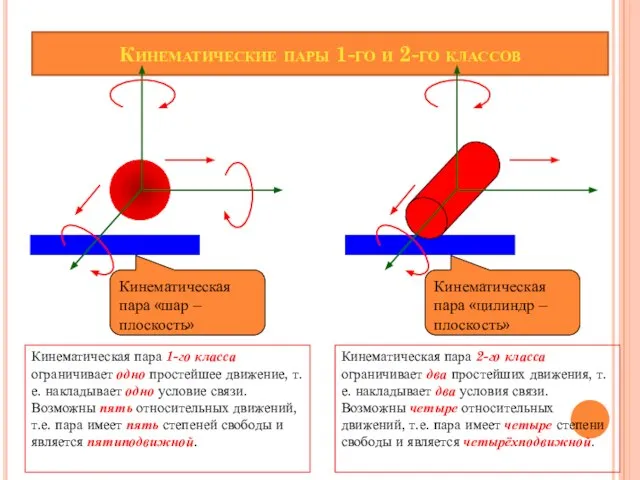
- 27. Кинематические пары 1-го и 2-го классов Кинематическая пара «шар – плоскость» Кинематическая пара «цилиндр – плоскость»
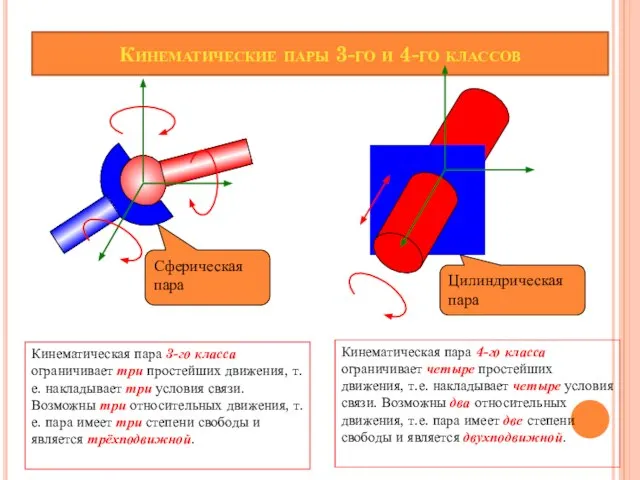
- 28. Кинематические пары 3-го и 4-го классов Сферическая пара Цилиндрическая пара Кинематическая пара 3-го класса ограничивает три
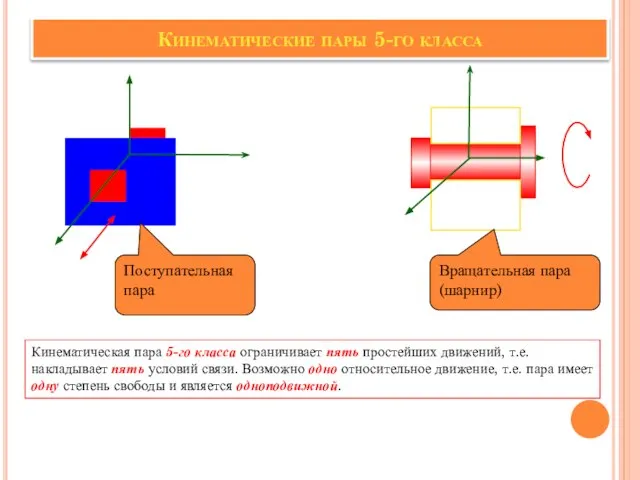
- 29. Кинематические пары 5-го класса Поступательная пара Вращательная пара (шарнир) Кинематическая пара 5-го класса ограничивает пять простейших
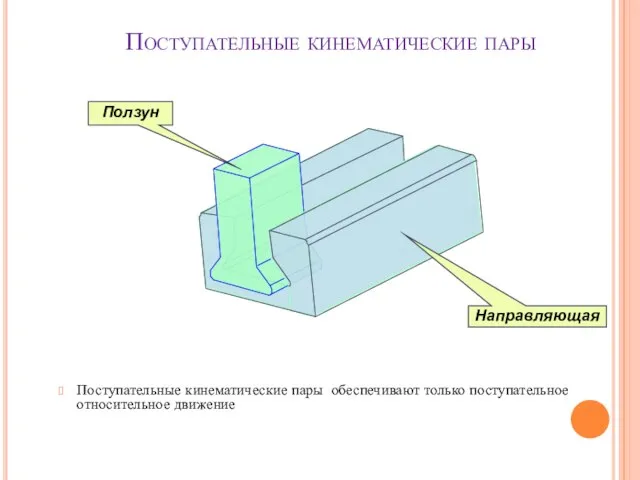
- 30. Поступательные кинематические пары Поступательные кинематические пары обеспечивают только поступательное относительное движение Ползун Направляющая
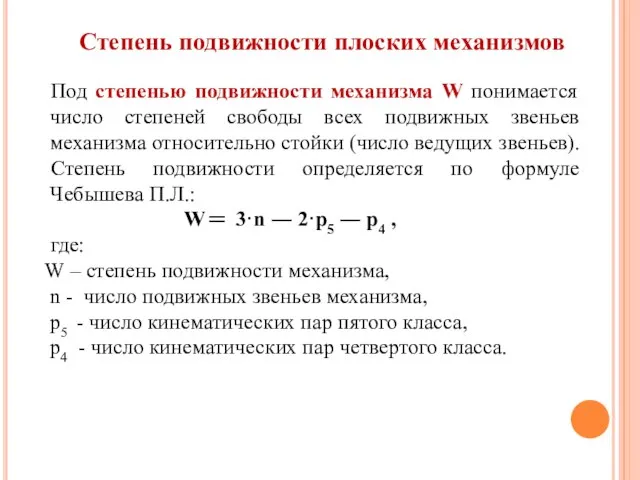
- 31. Степень подвижности плоских механизмов Под степенью подвижности механизма W понимается число степеней свободы всех подвижных звеньев
- 32. Как образуются новые плоские механизмы ? На этот вопрос ответил в 1914 году русский ученый Ассур
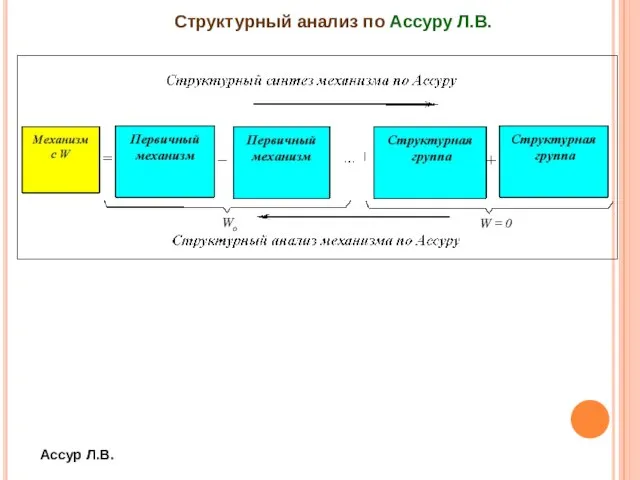
- 33. Принцип образования плоских механизмов, предложенный Ассуром Л.В. К начальному механизму последовательно присоединяются группы Ассура 2-го, 3-го
- 34. Структурный анализ по Ассуру Л.В. Ассур Л.В. Wo W = 0
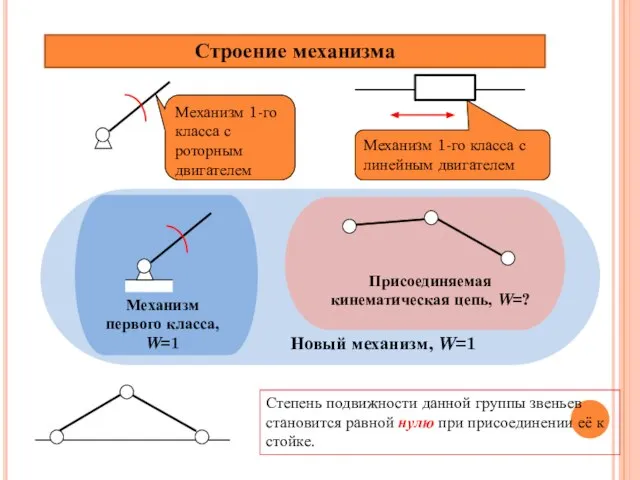
- 35. Начальные (первичные) механизмы 1 класса Под начальным (первичным) механизмом понимают механизм, состоящий из двух звеньев: одно
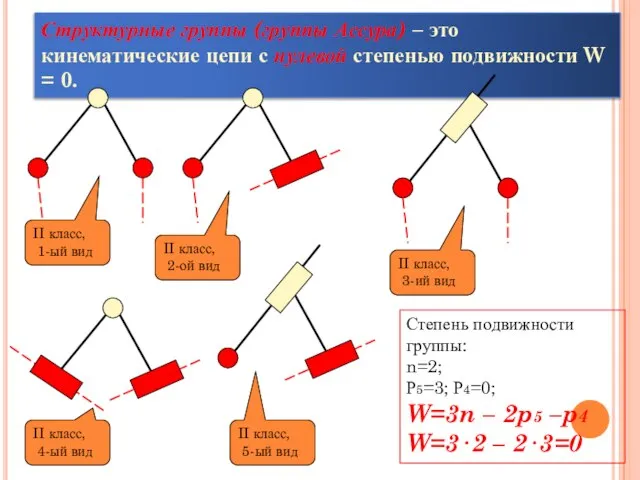
- 36. Структурные группы (группы Ассура) – это кинематические цепи с нулевой степенью подвижности W = 0. II
- 37. Механизм 1-го класса с роторным двигателем Механизм 1-го класса с линейным двигателем Степень подвижности данной группы
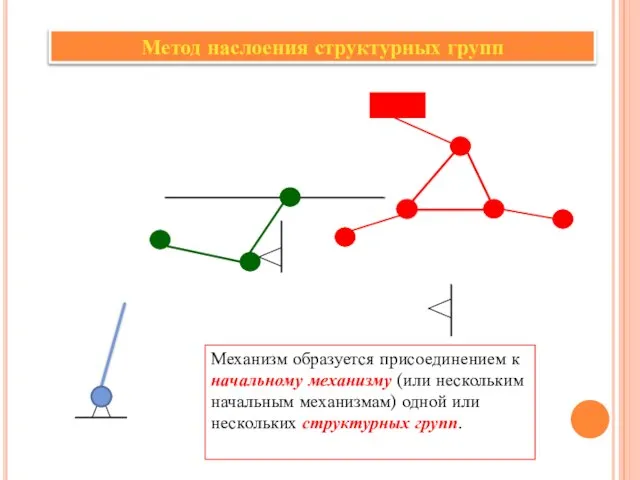
- 38. Механизм образуется присоединением к начальному механизму (или нескольким начальным механизмам) одной или нескольких структурных групп. Метод
- 41. Скачать презентацию
Слайд 3Особенности дисциплины
В отличие от специальных дисциплин, в которых изучаются реальные машины и
Особенности дисциплины
В отличие от специальных дисциплин, в которых изучаются реальные машины и
Слайд 4Типовые механизмы
Типовыми механизмами называются простые механизмы, имеющие при различном функциональном назначении широкое
Типовые механизмы
Типовыми механизмами называются простые механизмы, имеющие при различном функциональном назначении широкое
Слайд 5лекция №1.
Рассмотрим в качестве примера кривошипно-ползунный механизм
где,
1-кривошип;
2-шатун;
3-ползун
Этот
лекция №1.
Рассмотрим в качестве примера кривошипно-ползунный механизм
где,
1-кривошип;
2-шатун;
3-ползун
Этот

Слайд 7СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА (СТРОЕНИЕ) – изучает способ образования механизма (составляющие части механизма)
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА (СТРОЕНИЕ) – изучает способ образования механизма (составляющие части механизма)
Слайд 8Кинематика механизма – изучает движение его звеньев без учета сил
Кинематика механизма – изучает движение его звеньев без учета сил
Слайд 9Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих это
Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих это
Слайд 10Анализ – определение свойств (параметров) известного механизма
Анализ – определение свойств (параметров) известного механизма

Слайд 11Синтез – создание нового механизма с заданными свойствами (параметрами)
Синтез – создание нового механизма с заданными свойствами (параметрами)
Слайд 12Машина - это устройство, которое предназначено для преобразования энергии, материалов, информации для
Машина - это устройство, которое предназначено для преобразования энергии, материалов, информации для

Слайд 13Машина состоит из механизмов
Механизм - это система тел, предназначенных для преобразования одного
Машина состоит из механизмов
Механизм - это система тел, предназначенных для преобразования одного
Слайд 14
Основные понятия теории механизмов и машин.
Машина – устройство, предназначенное для преобразования
Основные понятия теории механизмов и машин.
Машина – устройство, предназначенное для преобразования
Слайд 15Шатун - одно звено , но состоит из нескольких деталей
Шатун - одно звено , но состоит из нескольких деталей



Слайд 21Звенья в механизме соединяются между собой подвижным соединением,
которое называется
кинематической парой
Звенья в механизме соединяются между собой подвижным соединением,
которое называется
кинематической парой

Слайд 22Классификация кинематических пар
Классификация кинематических пар
Слайд 23Классификация по виду контакта звеньев
В высших парах звенья со-прикасаются по линии или
Классификация по виду контакта звеньев
В высших парах звенья со-прикасаются по линии или
Слайд 24Силовое и геометрическое замыкание
Силовое замыкание посредством пружины
Геометрическое замыкание посредством паза
Силовое и геометрическое замыкание
Силовое замыкание посредством пружины
Геометрическое замыкание посредством паза
Слайд 25Степень подвижности свободного тела в пространстве
Н = 6
Степень подвижности свободного тела в пространстве
Н = 6

Слайд 26Классификация по числу условий связи
Z
X
Y
Ограничения, наложенные кинематической парой на относительные движения составляющих
Классификация по числу условий связи
Z
X
Y
Ограничения, наложенные кинематической парой на относительные движения составляющих
Слайд 27Кинематические пары 1-го и 2-го классов
Кинематическая пара «шар – плоскость»
Кинематическая пара
Кинематические пары 1-го и 2-го классов
Кинематическая пара «шар – плоскость»
Кинематическая пара
Слайд 28Кинематические пары 3-го и 4-го классов
Сферическая пара
Цилиндрическая пара
Кинематическая пара 3-го класса ограничивает
Кинематические пары 3-го и 4-го классов
Сферическая пара
Цилиндрическая пара
Кинематическая пара 3-го класса ограничивает
Слайд 29Кинематические пары 5-го класса
Поступательная пара
Вращательная пара (шарнир)
Кинематическая пара 5-го класса ограничивает пять
Кинематические пары 5-го класса
Поступательная пара
Вращательная пара (шарнир)
Кинематическая пара 5-го класса ограничивает пять
Слайд 30Поступательные кинематические пары
Поступательные кинематические пары обеспечивают только поступательное относительное движение
Ползун
Направляющая
Поступательные кинематические пары
Поступательные кинематические пары обеспечивают только поступательное относительное движение
Ползун
Направляющая
Слайд 31 Степень подвижности плоских механизмов
Под степенью подвижности механизма W понимается число степеней
Степень подвижности плоских механизмов
Под степенью подвижности механизма W понимается число степеней
Слайд 32Как образуются новые плоские механизмы ?
На этот вопрос ответил в 1914 году
Как образуются новые плоские механизмы ? На этот вопрос ответил в 1914 году
Слайд 33Принцип образования
плоских механизмов, предложенный Ассуром Л.В.
К начальному механизму последовательно присоединяются
группы
Принцип образования плоских механизмов, предложенный Ассуром Л.В. К начальному механизму последовательно присоединяются группы
Слайд 34Структурный анализ по Ассуру Л.В.
Ассур Л.В.
Wo
W = 0
Структурный анализ по Ассуру Л.В.
Ассур Л.В.
Wo
W = 0
Слайд 35Начальные (первичные) механизмы 1 класса
Под начальным (первичным) механизмом понимают механизм, состоящий
Начальные (первичные) механизмы 1 класса
Под начальным (первичным) механизмом понимают механизм, состоящий

Слайд 36Структурные группы (группы Ассура) – это кинематические цепи с нулевой степенью подвижности
Структурные группы (группы Ассура) – это кинематические цепи с нулевой степенью подвижности
Слайд 37Механизм 1-го класса с роторным двигателем
Механизм 1-го класса с линейным двигателем
Степень подвижности
Механизм 1-го класса с роторным двигателем
Механизм 1-го класса с линейным двигателем
Степень подвижности
Слайд 38Механизм образуется присоединением к начальному механизму (или нескольким начальным механизмам) одной или
Механизм образуется присоединением к начальному механизму (или нескольким начальным механизмам) одной или
 Презентация на тему Электрическое поле
Презентация на тему Электрическое поле  Источники радиоактивных загрязнений
Источники радиоактивных загрязнений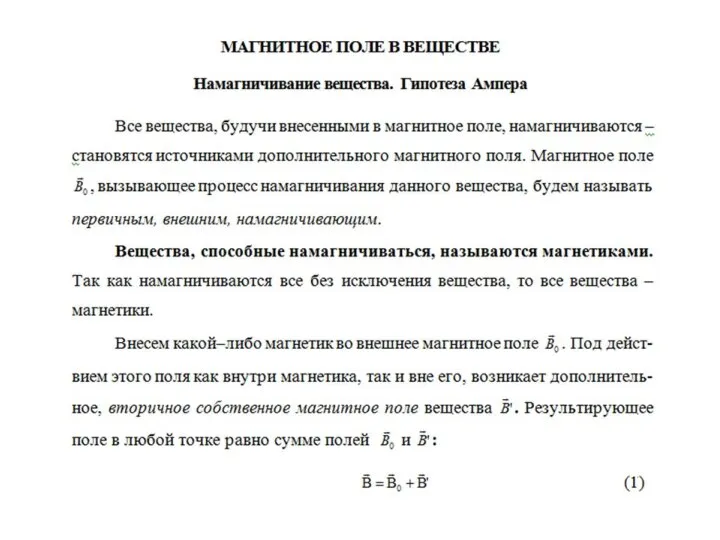 Магнитное поле в веществе. (Лекция 7)
Магнитное поле в веществе. (Лекция 7)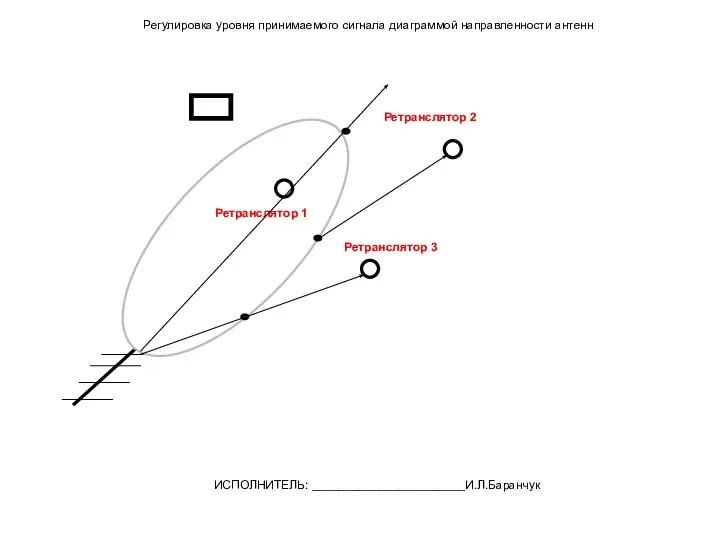 Регулировка уровня принимаемого сигнала диаграммой направленности антенн
Регулировка уровня принимаемого сигнала диаграммой направленности антенн Изделие и техническая информация о нем
Изделие и техническая информация о нем Состав атомного ядра
Состав атомного ядра Лень – двигатель прогресса или труженики с вековым стажем
Лень – двигатель прогресса или труженики с вековым стажем Системы АРУ. Примеры и реализация
Системы АРУ. Примеры и реализация Солнечные элементы на основе кристаллического кремния
Солнечные элементы на основе кристаллического кремния Технологическая карта урока Учитель физики МБОУ СОШ № 14 г. Камышин Волгоградской обл. Шелестова А. Г.
Технологическая карта урока Учитель физики МБОУ СОШ № 14 г. Камышин Волгоградской обл. Шелестова А. Г. Изменение изотопного состава. Выгорание топлива
Изменение изотопного состава. Выгорание топлива Оптика. Основные законы оптики
Оптика. Основные законы оптики Паровые машины. (8 класс)
Паровые машины. (8 класс) Презентация на тему Внутренняя энергия
Презентация на тему Внутренняя энергия  A no-go theorem on the nature of the gravitational field beyond quantum theory
A no-go theorem on the nature of the gravitational field beyond quantum theory Сила. Масса. Законы Ньютона 9 класс
Сила. Масса. Законы Ньютона 9 класс Оптика, квантовая оптика, квантовая механика
Оптика, квантовая оптика, квантовая механика Кинематика периодического движения (1)
Кинематика периодического движения (1) Соединения проводников. Задачи
Соединения проводников. Задачи Конденсаторы, емкостное сопротивление. Тема 10
Конденсаторы, емкостное сопротивление. Тема 10 Работа и потенциал электрического поля
Работа и потенциал электрического поля Нанотехнологии и наноматериалы
Нанотехнологии и наноматериалы История создания швейной машины
История создания швейной машины Электричество и магнетизм. Лекция 13. Электромагнитная индукция
Электричество и магнетизм. Лекция 13. Электромагнитная индукция Демонтаж радиатора системы охлаждения легкого автомобиля
Демонтаж радиатора системы охлаждения легкого автомобиля Магнитное поле. Вектор магнитной индукции
Магнитное поле. Вектор магнитной индукции Полное отражение
Полное отражение Презентация на тему Закон преломления света (8 класс)
Презентация на тему Закон преломления света (8 класс)