- Общие принципы управления и особенности осуществления

Содержание
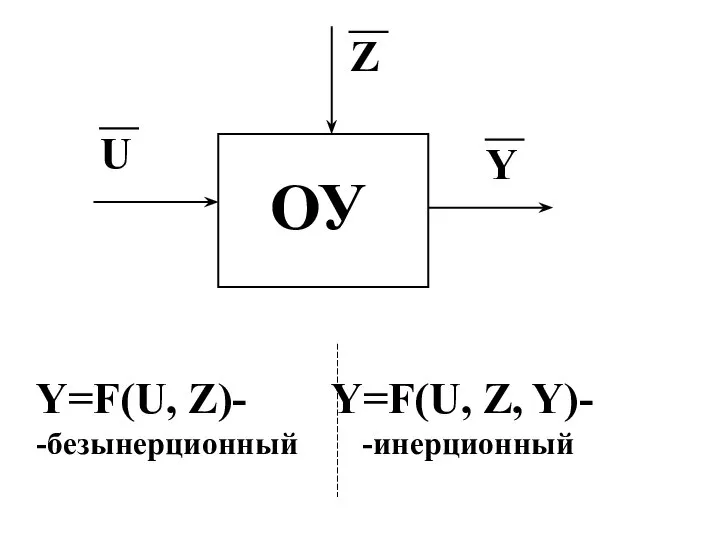
- 2. ОУ Z U Y Y=F(U, Z)- Y=F(U, Z, Y)- -безынерционный -инерционный
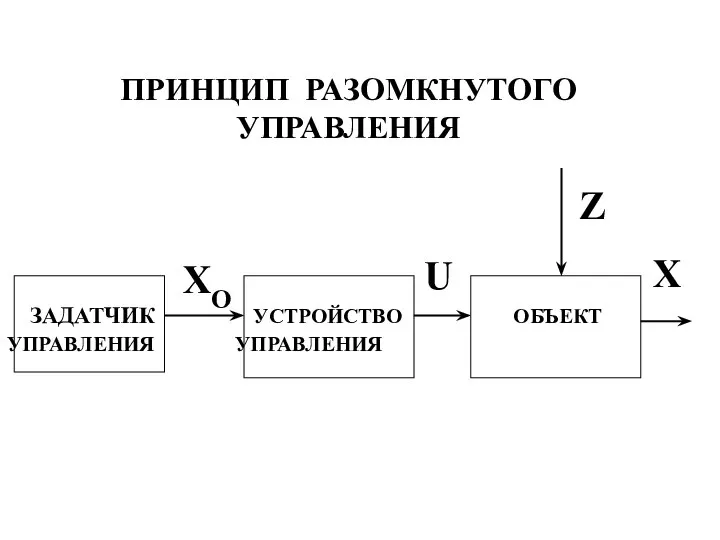
- 3. ПРИНЦИП РАЗОМКНУТОГО УПРАВЛЕНИЯ ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ Z XO U X
- 4. ПРИНЦИП КОМПЕНСАЦИИ ВОЗМУЩЕНИЯ ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ Z XO U1 X U1–U2 ПРЕОБРАЗОВАТЕЛЬ-НОЕ УСТРОЙСТВО U2
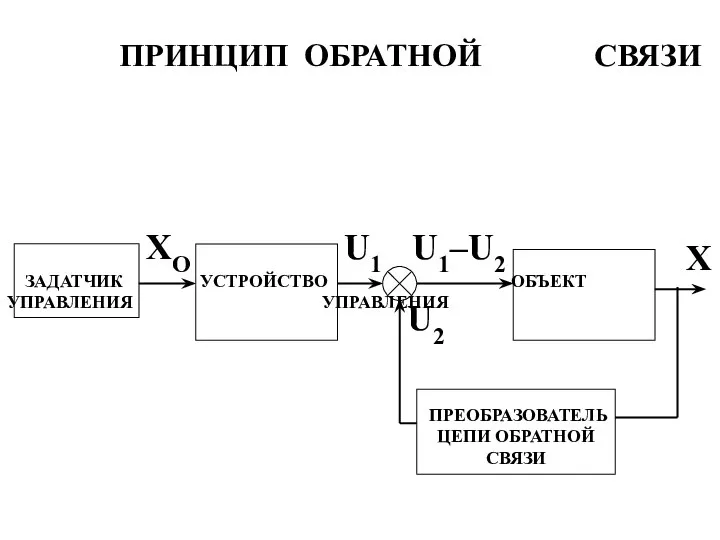
- 5. ПРИНЦИП ОБРАТНОЙ СВЯЗИ ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ XO U1 X U1–U2 ПРЕОБРАЗОВАТЕЛЬ ЦЕПИ ОБРАТНОЙ СВЯЗИ
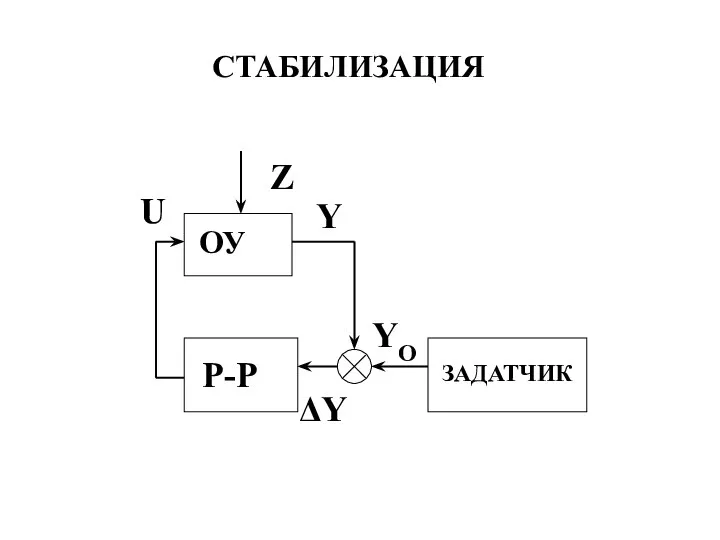
- 6. СТАБИЛИЗАЦИЯ ЗАДАТЧИК Z YO ОУ U Р-Р Y ΔY
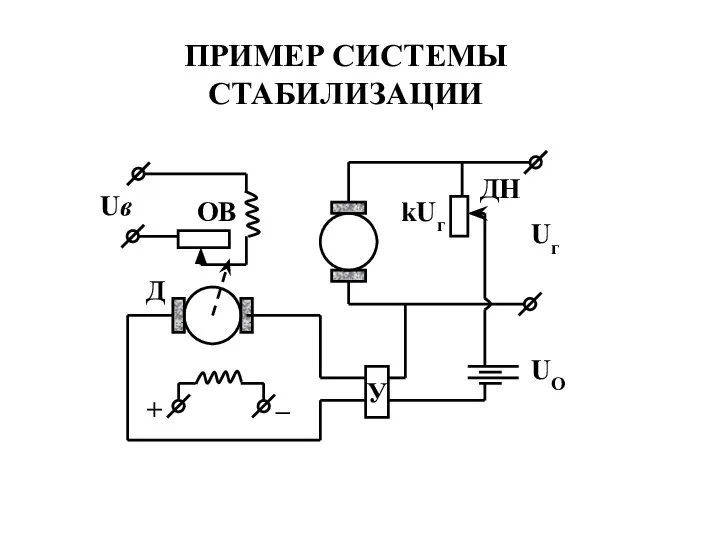
- 11. ПРИМЕР СИСТЕМЫ СТАБИЛИЗАЦИИ У _ + Uв ОВ ДН kUг Д UO Uг
- 12. ДН – двигатель напряжения У – усилитель Д - двигатель постоянного тока ОВ – обмотка возбуждения
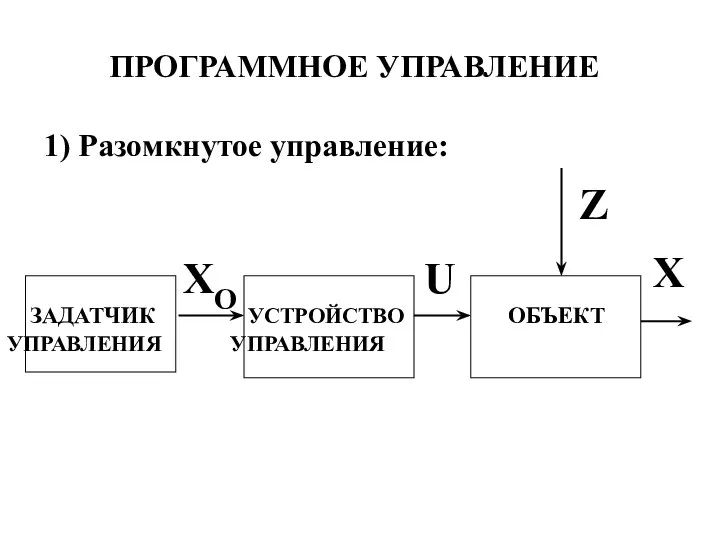
- 14. ПРОГРАММНОЕ УПРАВЛЕНИЕ ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ Z XO U X 1) Разомкнутое управление:
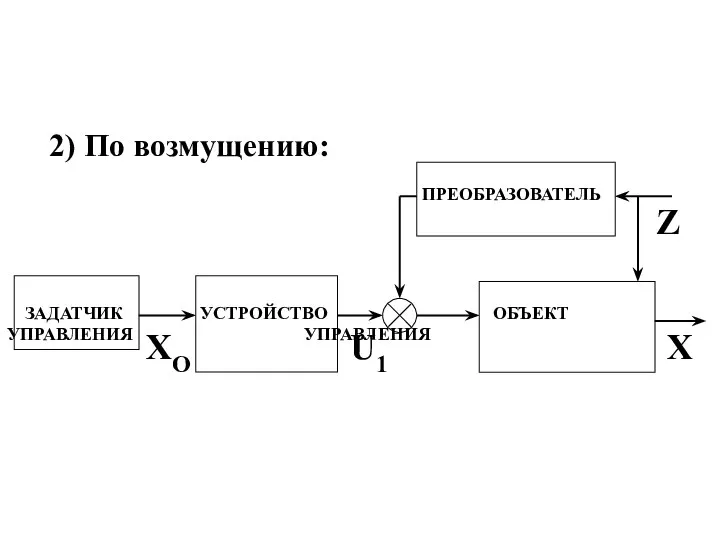
- 15. 2) По возмущению: ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ Z XO U1 X ПРЕОБРАЗОВАТЕЛЬ
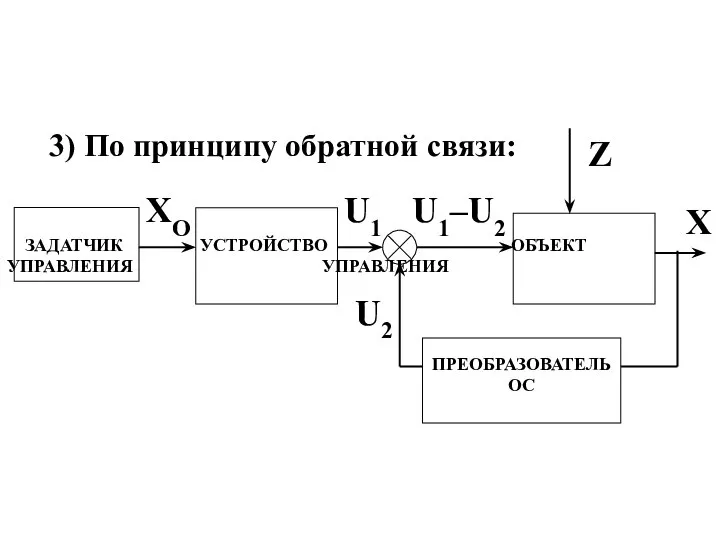
- 16. 3) По принципу обратной связи: ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ XO U1 X U1–U2 ПРЕОБРАЗОВАТЕЛЬ ОС
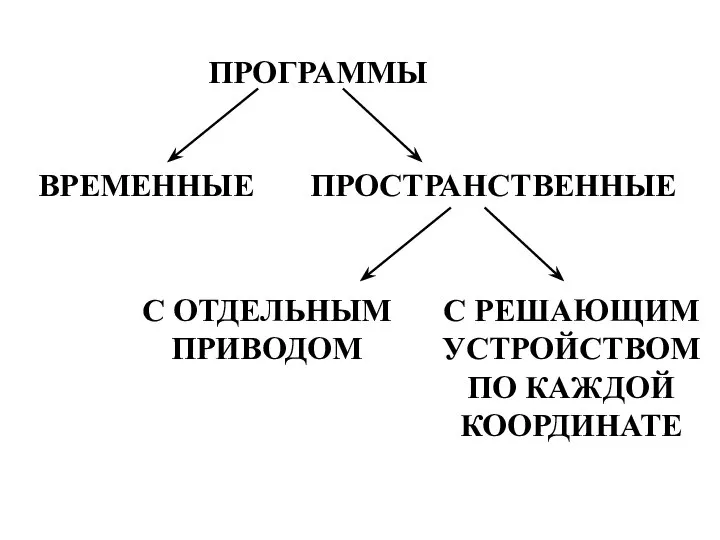
- 17. ПРОГРАММЫ ВРЕМЕННЫЕ ПРОСТРАНСТВЕННЫЕ С ОТДЕЛЬНЫМ ПРИВОДОМ С РЕШАЮЩИМ УСТРОЙСТВОМ ПО КАЖДОЙ КООРДИНАТЕ
- 18. СЛЕДЯЩИЕ СИСТЕМЫ У2 У1 ε 1 2 Θвх Θвых 3 4 5
- 19. 1 – электромагнитный усилитель 3 – приводной двигатель 4 – сельсин-приёмник 5 – сельсин-датчик
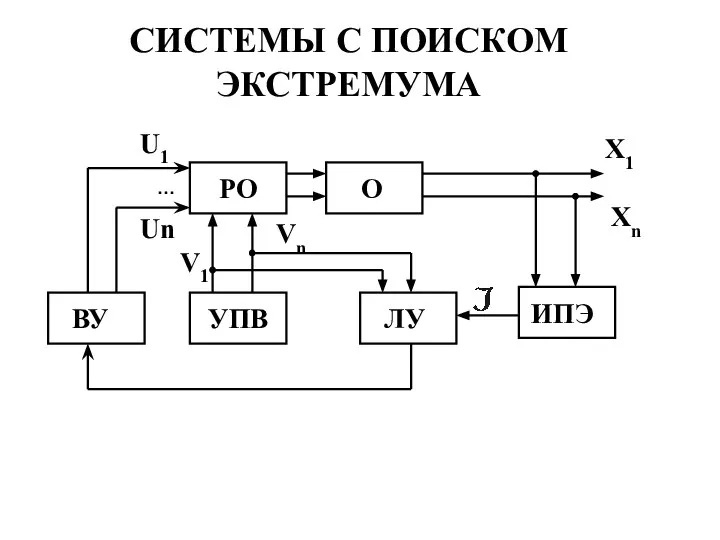
- 21. СИСТЕМЫ С ПОИСКОМ ЭКСТРЕМУМА РО О УПВ ИПЭ ЛУ ВУ U1 Un … V1 Vn X1
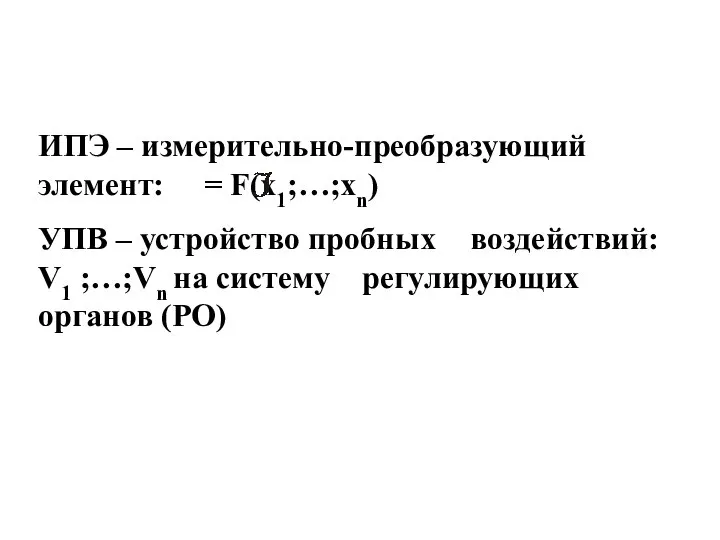
- 22. ИПЭ – измерительно-преобразующий элемент: = F(x1;…;xn) УПВ – устройство пробных воздействий: V1 ;…;Vn на систему регулирующих
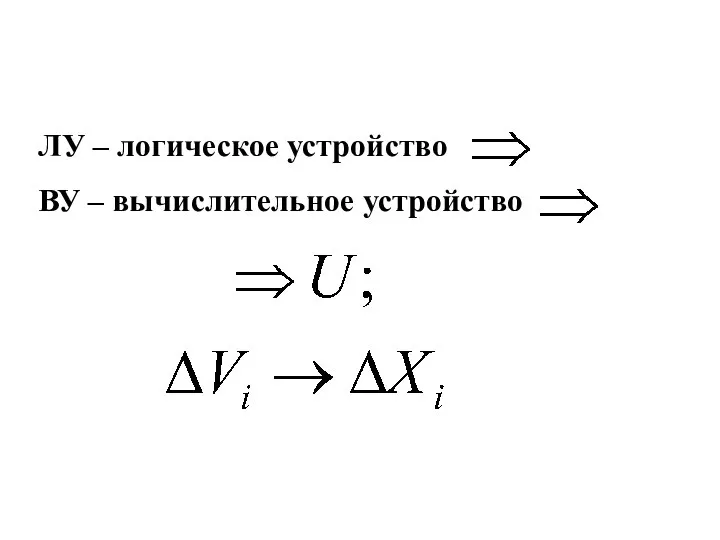
- 23. ЛУ – логическое устройство ВУ – вычислительное устройство
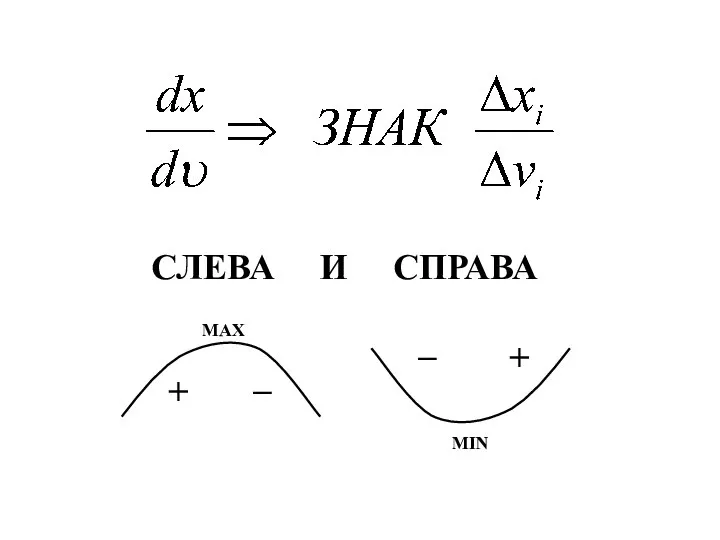
- 24. + _ + _ СЛЕВА И СПРАВА MAX MIN
- 25. ОУ ВМ V Z X(∞) X(0) X
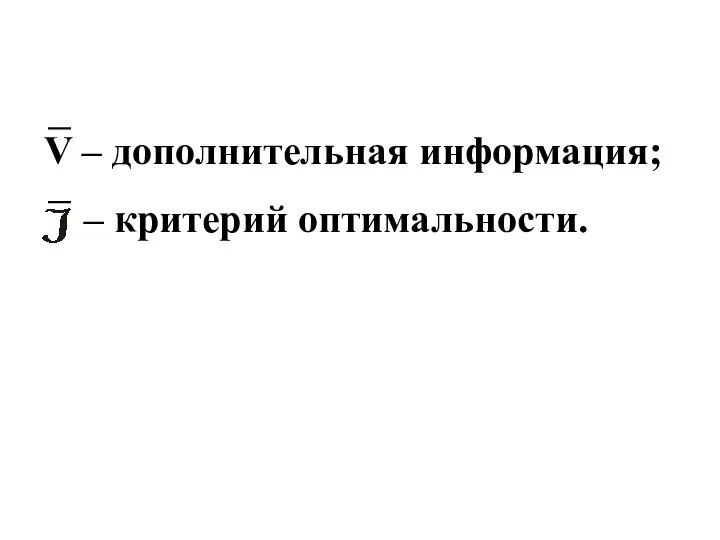
- 26. V – дополнительная информация; – критерий оптимальности.
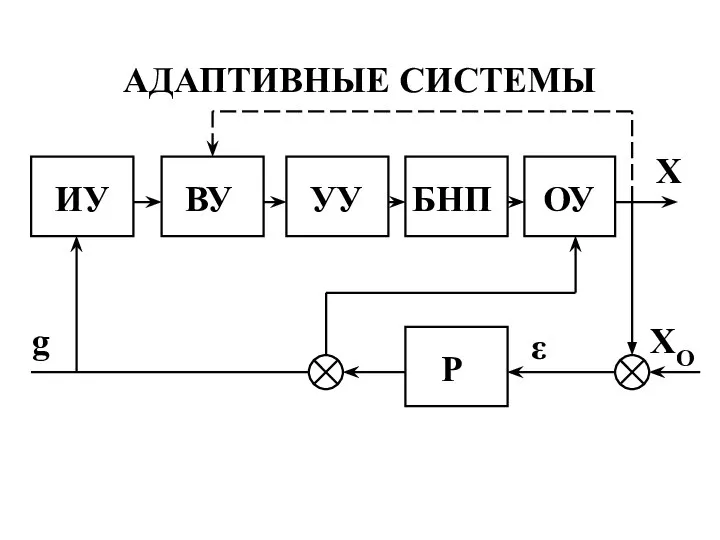
- 27. АДАПТИВНЫЕ СИСТЕМЫ ИУ ВУ УУ БНП ОУ g P ε XO X
- 29. Скачать презентацию
Слайд 3ПРИНЦИП РАЗОМКНУТОГО УПРАВЛЕНИЯ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U
ПРИНЦИП РАЗОМКНУТОГО УПРАВЛЕНИЯ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U
Слайд 4ПРИНЦИП КОМПЕНСАЦИИ ВОЗМУЩЕНИЯ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U1
ПРИНЦИП КОМПЕНСАЦИИ ВОЗМУЩЕНИЯ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U1

Слайд 5ПРИНЦИП ОБРАТНОЙ СВЯЗИ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
XO
U1
X
U1–U2
ПРИНЦИП ОБРАТНОЙ СВЯЗИ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
XO
U1
X
U1–U2
Слайд 6СТАБИЛИЗАЦИЯ
ЗАДАТЧИК
Z
YO
ОУ
U
Р-Р
Y
ΔY
СТАБИЛИЗАЦИЯ
ЗАДАТЧИК
Z
YO
ОУ
U
Р-Р
Y
ΔY
Слайд 11ПРИМЕР СИСТЕМЫ СТАБИЛИЗАЦИИ
У
_
+
Uв
ОВ
ДН
kUг
Д
UO
Uг
ПРИМЕР СИСТЕМЫ СТАБИЛИЗАЦИИ
У
_
+
Uв
ОВ
ДН
kUг
Д
UO
Uг
Слайд 12ДН – двигатель напряжения
У – усилитель
Д - двигатель постоянного тока
ОВ – обмотка
ДН – двигатель напряжения
У – усилитель
Д - двигатель постоянного тока
ОВ – обмотка
Слайд 14ПРОГРАММНОЕ УПРАВЛЕНИЕ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U
X
1)
ПРОГРАММНОЕ УПРАВЛЕНИЕ
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U
X
1)
Слайд 152) По возмущению:
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U1
2) По возмущению:
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
Z
XO
U1
Слайд 163) По принципу обратной связи:
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
XO
3) По принципу обратной связи:
ЗАДАТЧИК УСТРОЙСТВО ОБЪЕКТ УПРАВЛЕНИЯ УПРАВЛЕНИЯ
XO
Слайд 17ПРОГРАММЫ
ВРЕМЕННЫЕ ПРОСТРАНСТВЕННЫЕ
С ОТДЕЛЬНЫМ ПРИВОДОМ
С РЕШАЮЩИМ УСТРОЙСТВОМ ПО КАЖДОЙ КООРДИНАТЕ
ПРОГРАММЫ
ВРЕМЕННЫЕ ПРОСТРАНСТВЕННЫЕ
С ОТДЕЛЬНЫМ ПРИВОДОМ
С РЕШАЮЩИМ УСТРОЙСТВОМ ПО КАЖДОЙ КООРДИНАТЕ
Слайд 18СЛЕДЯЩИЕ СИСТЕМЫ
У2
У1
ε
1
2
Θвх
Θвых
3
4
5
СЛЕДЯЩИЕ СИСТЕМЫ
У2
У1
ε
1
2
Θвх
Θвых
3
4
5
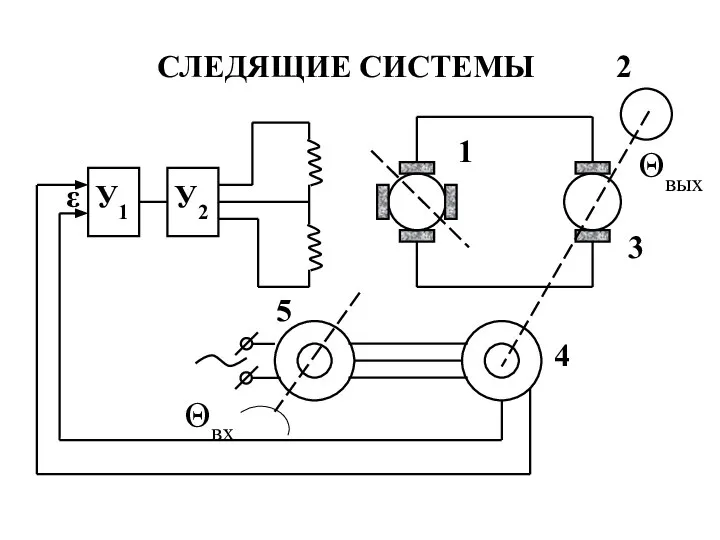
Слайд 191 – электромагнитный усилитель
3 – приводной двигатель
4 – сельсин-приёмник
5 – сельсин-датчик
1 – электромагнитный усилитель
3 – приводной двигатель
4 – сельсин-приёмник
5 – сельсин-датчик
Слайд 21СИСТЕМЫ С ПОИСКОМ ЭКСТРЕМУМА
РО
О
УПВ
ИПЭ
ЛУ
ВУ
U1
Un
…
V1
Vn
X1
Xn
СИСТЕМЫ С ПОИСКОМ ЭКСТРЕМУМА
РО
О
УПВ
ИПЭ
ЛУ
ВУ
U1
Un
…
V1
Vn
X1
Xn
Слайд 22ИПЭ – измерительно-преобразующий элемент: = F(x1;…;xn)
УПВ – устройство пробных воздействий: V1 ;…;Vn
ИПЭ – измерительно-преобразующий элемент: = F(x1;…;xn)
УПВ – устройство пробных воздействий: V1 ;…;Vn
Слайд 23ЛУ – логическое устройство
ВУ – вычислительное устройство
ЛУ – логическое устройство
ВУ – вычислительное устройство
Слайд 24+
_
+
_
СЛЕВА И СПРАВА
MAX
MIN
+
_
+
_
СЛЕВА И СПРАВА
MAX
MIN
Слайд 25ОУ
ВМ
V
Z
X(∞)
X(0)
X
ОУ
ВМ
V
Z
X(∞)
X(0)
X
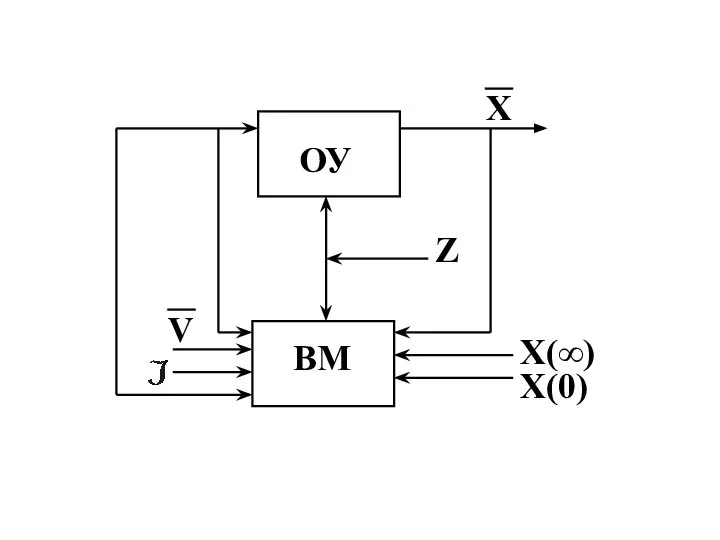
Слайд 26V – дополнительная информация;
– критерий оптимальности.
V – дополнительная информация;
– критерий оптимальности.
Слайд 27АДАПТИВНЫЕ СИСТЕМЫ
ИУ
ВУ
УУ
БНП
ОУ
g
P
ε
XO
X
АДАПТИВНЫЕ СИСТЕМЫ
ИУ
ВУ
УУ
БНП
ОУ
g
P
ε
XO
X
 Чи довго пратимете
Чи довго пратимете Переменный ток. Решение задач
Переменный ток. Решение задач Физика лазера
Физика лазера Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Фейерверки. Скорость звука
Фейерверки. Скорость звука Самолётные ответчики. Основы радиолокации
Самолётные ответчики. Основы радиолокации Поперечные и продольные волны. Энергия волны. Интерференция и дифракция волн. Звуковые волны
Поперечные и продольные волны. Энергия волны. Интерференция и дифракция волн. Звуковые волны УСТРОЙСТВО Л.Л
УСТРОЙСТВО Л.Л Законы постоянного тока
Законы постоянного тока СКОРОСТЬ СВЕТА
СКОРОСТЬ СВЕТА Экспериментальные методы исследования частиц
Экспериментальные методы исследования частиц Модульная конструкция двигателя Д-436-148 и её влияние на объём и качество технического обслуживания
Модульная конструкция двигателя Д-436-148 и её влияние на объём и качество технического обслуживания Построение изображений в линзах
Построение изображений в линзах Центр тяжести
Центр тяжести Паровые машины. (8 класс)
Паровые машины. (8 класс) Стримерлер - электрлік тесіп өтудің алдында атмосфералык қысым астында күшті электр өрісінде орналасқан газда кұралатын жіңішке
Стримерлер - электрлік тесіп өтудің алдында атмосфералык қысым астында күшті электр өрісінде орналасқан газда кұралатын жіңішке Уровнемер для сыпучих материалов
Уровнемер для сыпучих материалов Нагревание водяным паром
Нагревание водяным паром Пирометры
Пирометры Растяжение-сжатие прямого бруса
Растяжение-сжатие прямого бруса Волны. Кванты. Частицы
Волны. Кванты. Частицы Применение метода стабилизации связей к задачам неголономной механики
Применение метода стабилизации связей к задачам неголономной механики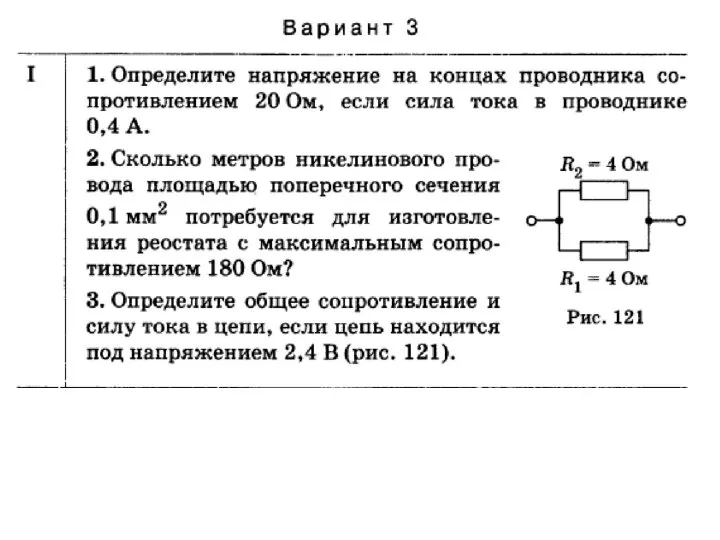 Задачи по физике. Электрический ток
Задачи по физике. Электрический ток Давление на примере ЦПГ
Давление на примере ЦПГ Создание оптических экспериментальных задач
Создание оптических экспериментальных задач Кожухотрубный реактор
Кожухотрубный реактор Элементы линейной алгебры в электротехнике (электронное учебное пособие)
Элементы линейной алгебры в электротехнике (электронное учебное пособие) Наладка станка на обработку детали Фланец нажимной и кодирование управляющей программы
Наладка станка на обработку детали Фланец нажимной и кодирование управляющей программы