- Теория механизмов и машин

Содержание
- 2. Оглавление Кинематика точки. Дифференцирование вектора постоянного модуля…………………………………………………………………………….……………………..3 Кинематика точки в декартовой системе координат.……………………………………………………………………………………………...9 Кинематика точки в
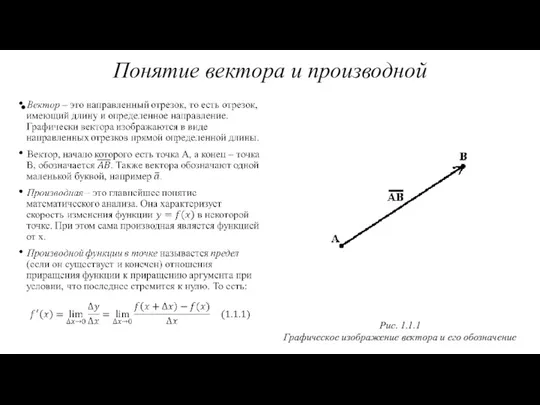
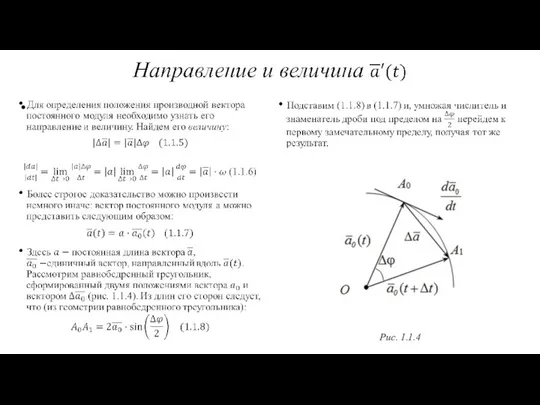
- 3. Понятие вектора и производной Рис. 1.1.1 Графическое изображение вектора и его обозначение
- 4. Вектор-функции
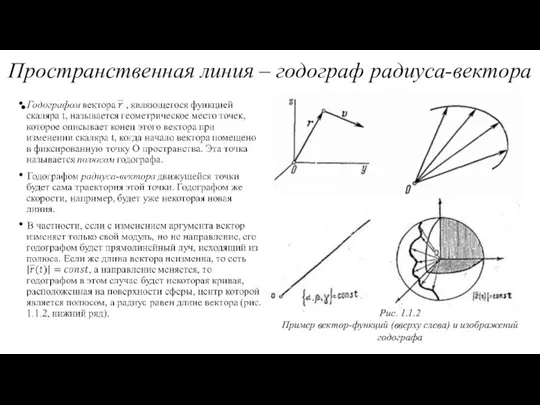
- 5. Пространственная линия – годограф радиуса-вектора Рис. 1.1.2 Пример вектор-функций (вверху слева) и изображений годографа
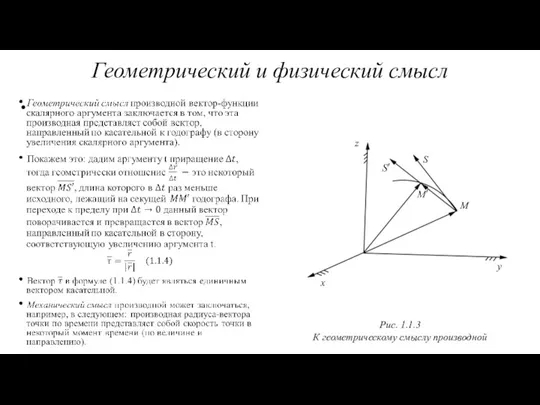
- 6. Геометрический и физический смысл Рис. 1.1.3 К геометрическому смыслу производной S M y x z
- 7. Рис. 1.1.4
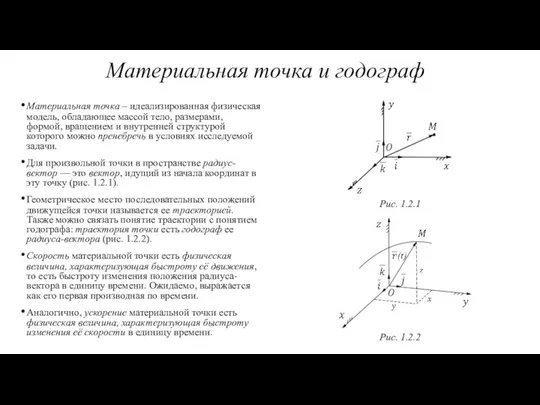
- 9. Материальная точка – идеализированная физическая модель, обладающее массой тело, размерами, формой, вращением и внутренней структурой которого
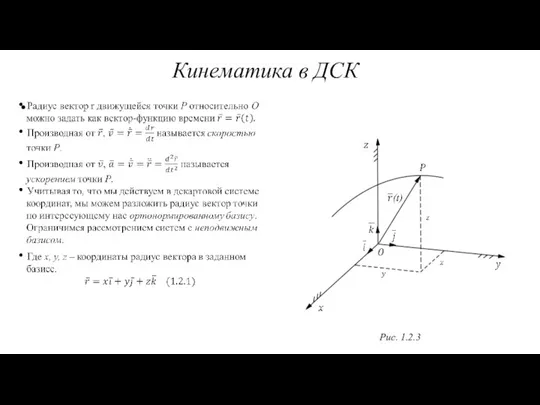
- 10. Кинематика в ДСК Рис. 1.2.3
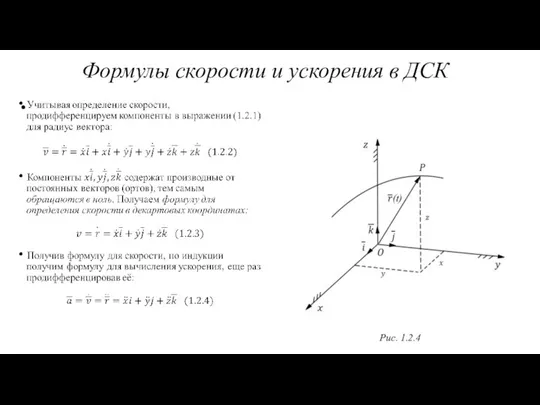
- 11. Формулы скорости и ускорения в ДСК Рис. 1.2.4
- 12. Выводы Иногда производить описание движения тела проще в декартовых координатах. Таким образом, мы получаем удобный аппарат
- 13. Полярная система координат Рис. 1.3.1 или (1.3.1)
- 14. Рис. 1.3.2 Определение Скорости в ПСК
- 15. Определение Ускорения в ПСК Рис. 1.3.3
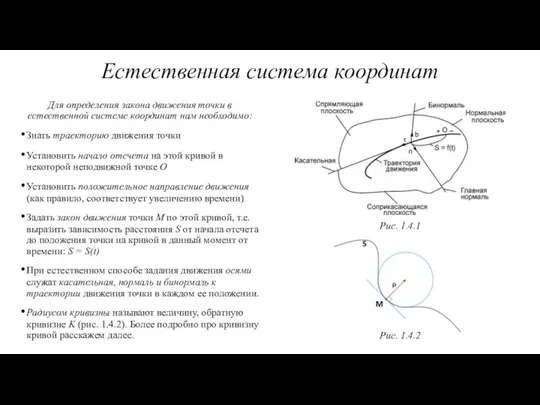
- 16. Для определения закона движения точки в естественной системе координат нам необходимо: Знать траекторию движения точки Установить
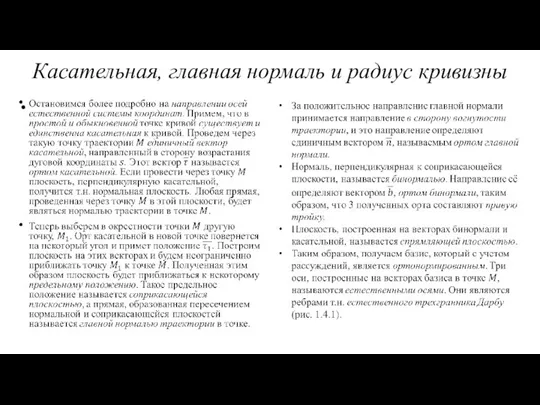
- 17. Касательная, главная нормаль и радиус кривизны
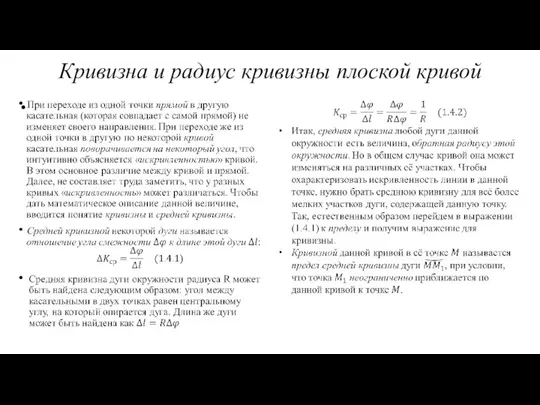
- 18. Кривизна и радиус кривизны плоской кривой
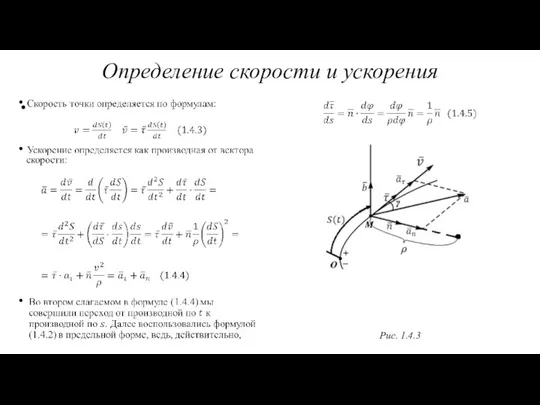
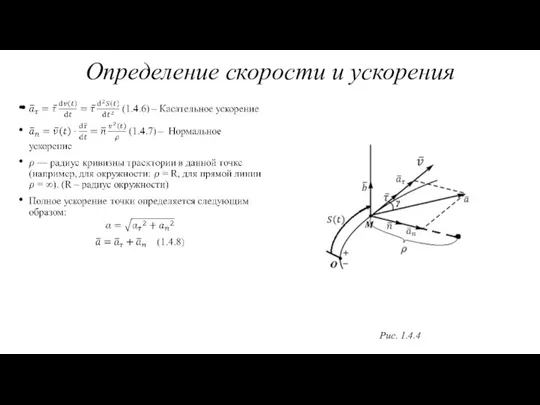
- 19. Определение скорости и ускорения Рис. 1.4.3
- 20. Определение скорости и ускорения Рис. 1.4.4
- 21. Определение сложного движения Рис. 1.5.1
- 22. Движение точки M по отношению к неподвижной системе отсчета – абсолютное движение. Её скорость и ускорение
- 23. Теорема о сложении скоростей Рис. 1.5.2
- 24. Теорема о сложении скоростей
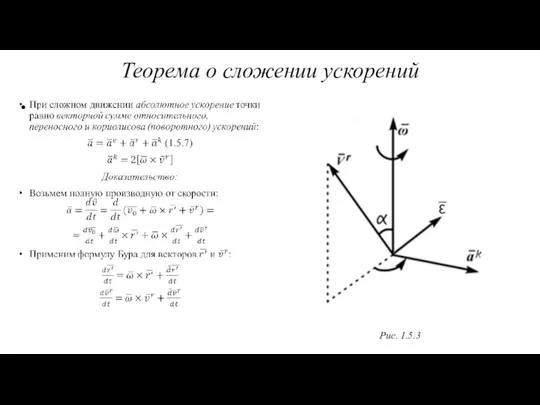
- 25. Рис. 1.5.3 Теорема о сложении ускорений
- 26. Теорема о сложении ускорений
- 27. Твёрдое тело (ТТ) – система материальных точек. Абсолютно твёрдое тело – идеализированная механическая система материальных точек,
- 28. Рис. 2.1.1 К доказательству основной теоремы кинематики ТТ Основная теорема кинематики твёрдого тела
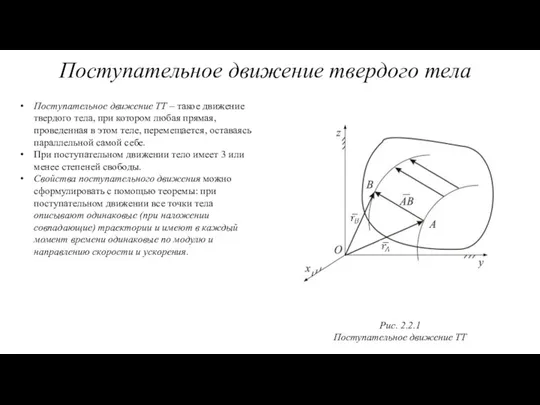
- 29. Поступательное движение ТТ – такое движение твердого тела, при котором любая прямая, проведенная в этом теле,
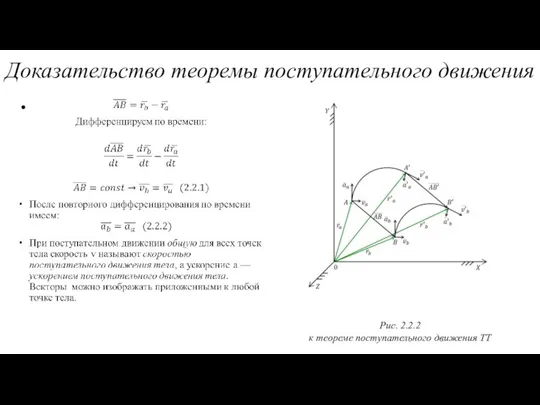
- 30. Рис. 2.2.2 к теореме поступательного движения ТТ Доказательство теоремы поступательного движения
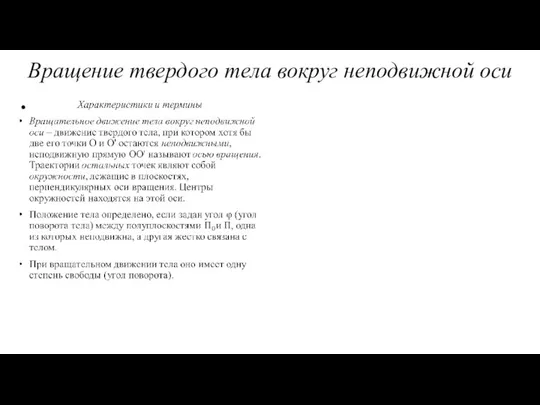
- 31. Вращение твердого тела вокруг неподвижной оси
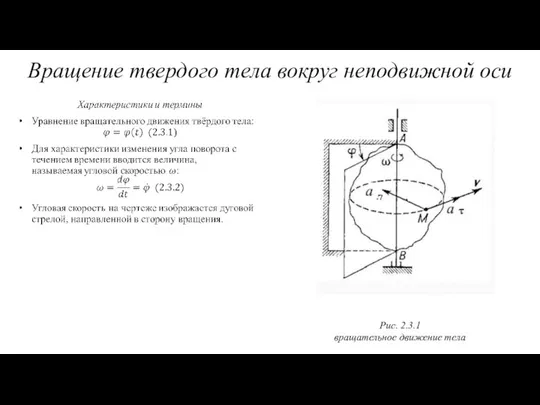
- 32. Рис. 2.3.1 вращательное движение тела Вращение твердого тела вокруг неподвижной оси
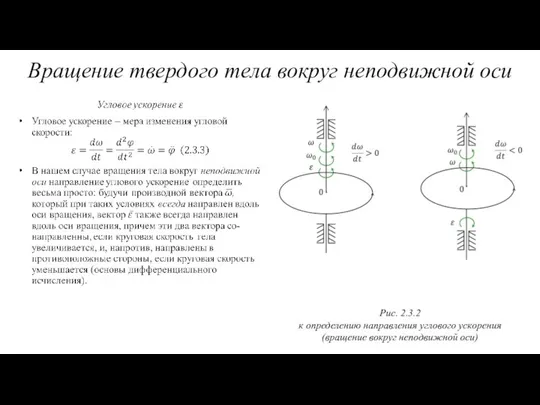
- 33. Рис. 2.3.2 к определению направления углового ускорения (вращение вокруг неподвижной оси) Вращение твердого тела вокруг неподвижной
- 34. Рис. 2.3.3 Кинематика точки ТТ в ЕСК Вращение твердого тела вокруг неподвижной оси
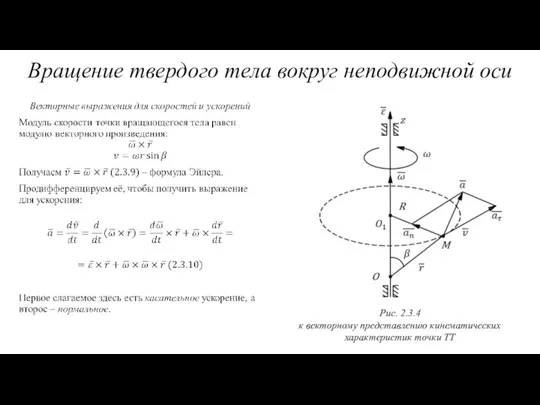
- 35. Рис. 2.3.4 к векторному представлению кинематических характеристик точки ТТ Вращение твердого тела вокруг неподвижной оси
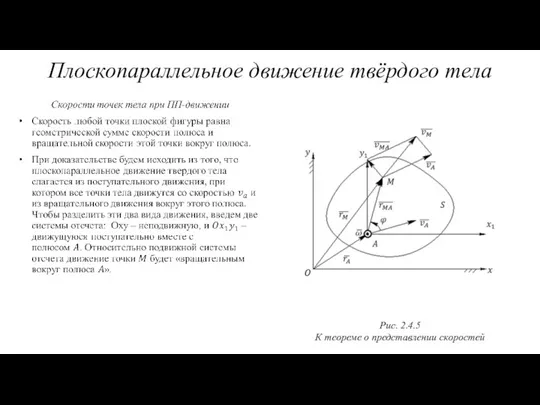
- 36. Определение Плоскопараллельным (или просто плоским) движением твёрдого тела называют такое движение, при котором все точки перемещаются
- 37. Рис. 2.4.2 К уравнениям движения Плоскопараллельное движение твёрдого тела
- 38. Рис. 2.4.3 Плоское движение как сумма поступательного и вращательного Плоскопараллельное движение твёрдого тела
- 39. Рис. 2.4.4 К кинематике плоского движения Плоскопараллельное движение твёрдого тела
- 40. Рис. 2.4.5 К теореме о представлении скоростей Плоскопараллельное движение твёрдого тела
- 41. Плоскопараллельное движение твёрдого тела
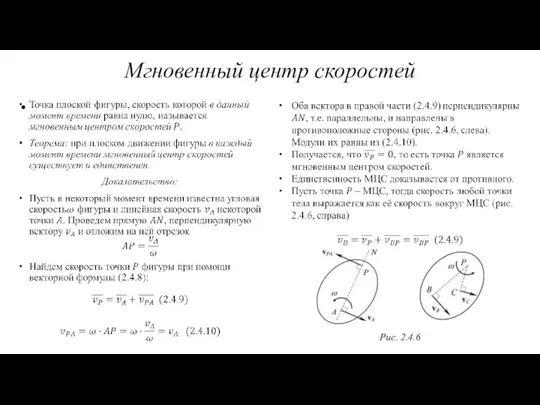
- 42. Мгновенный центр скоростей Рис. 2.4.6
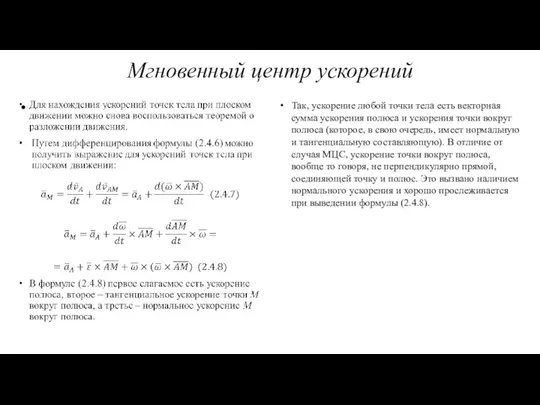
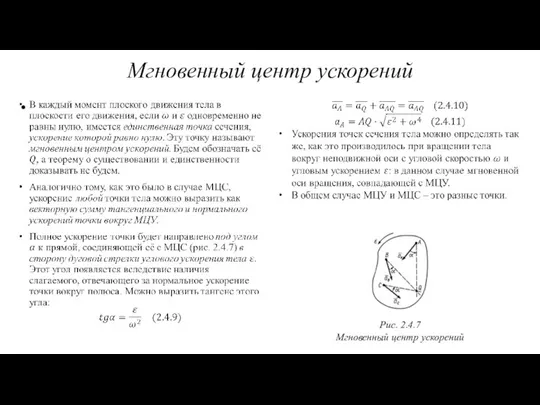
- 43. Мгновенный центр ускорений Так, ускорение любой точки тела есть векторная сумма ускорения полюса и ускорения точки
- 44. Мгновенный центр ускорений Рис. 2.4.7 Мгновенный центр ускорений
- 45. Основные понятия ТММ Теория механизмов и машин занимается созданием и изучением высокопроизводительных механизмов и машин. Механизм
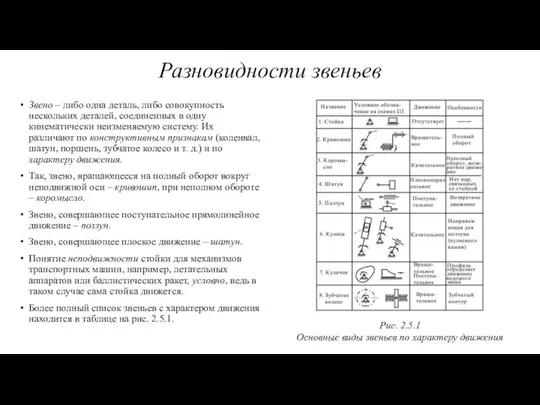
- 46. Разновидности звеньев Звено – либо одна деталь, либо совокупность нескольких деталей, соединенных в одну кинематически неизменяемую
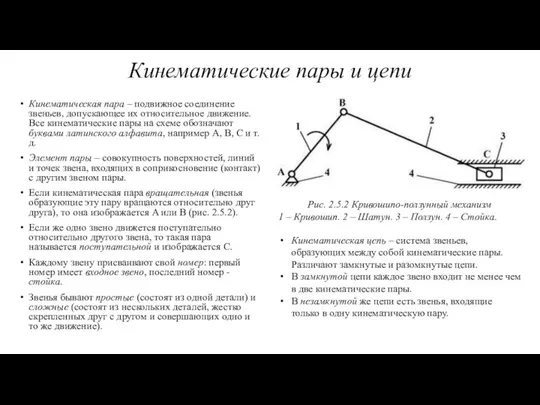
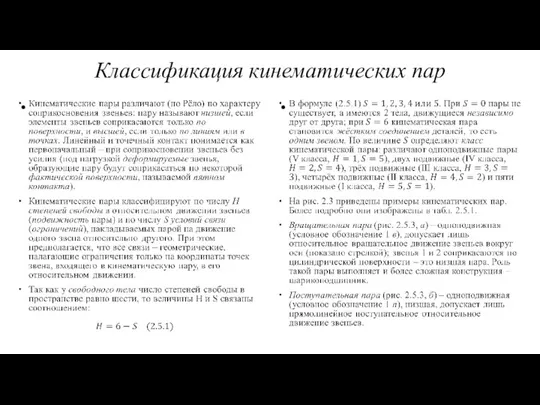
- 47. Кинематические пары и цепи Кинематическая пара – подвижное соединение звеньев, допускающее их относительное движение. Все кинематические
- 48. Классификация кинематических пар
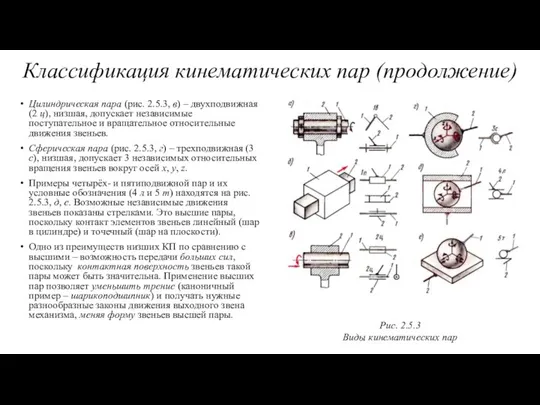
- 49. Классификация кинематических пар (продолжение) Цилиндрическая пара (рис. 2.5.3, в) – двухподвижная (2 ц), низшая, допускает независимые
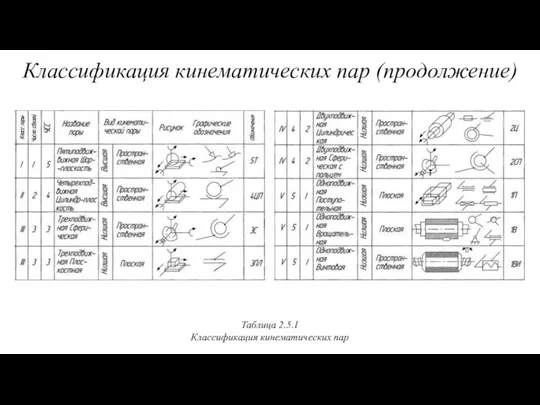
- 50. Классификация кинематических пар (продолжение) Таблица 2.5.1 Классификация кинематических пар
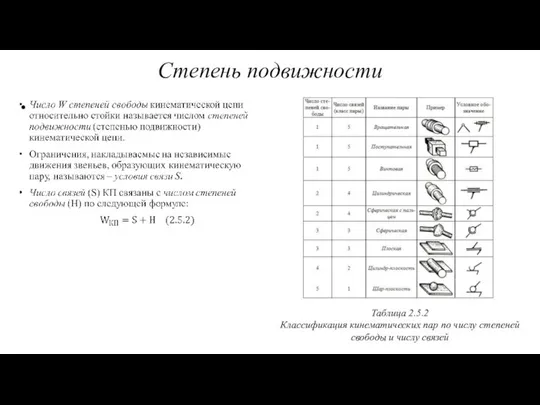
- 51. Степень подвижности Таблица 2.5.2 Классификация кинематических пар по числу степеней свободы и числу связей
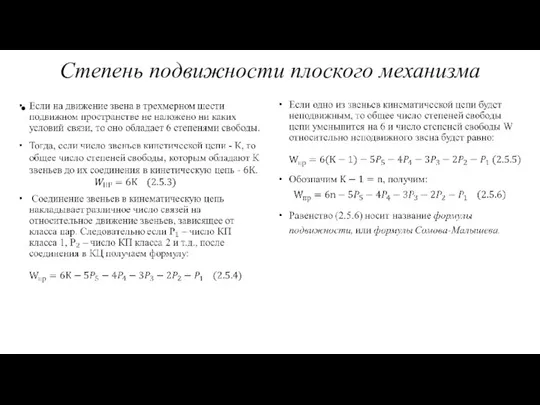
- 52. Степень подвижности плоского механизма
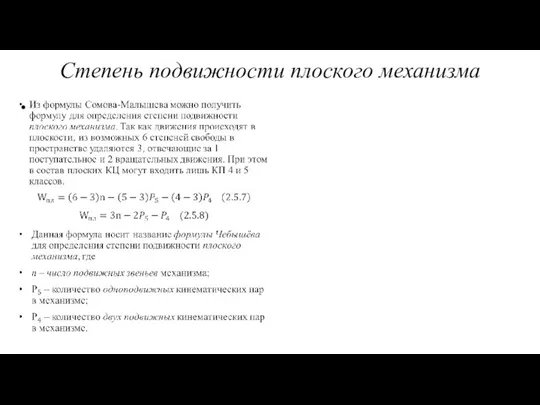
- 53. Степень подвижности плоского механизма
- 54. Структурные группы Ассура
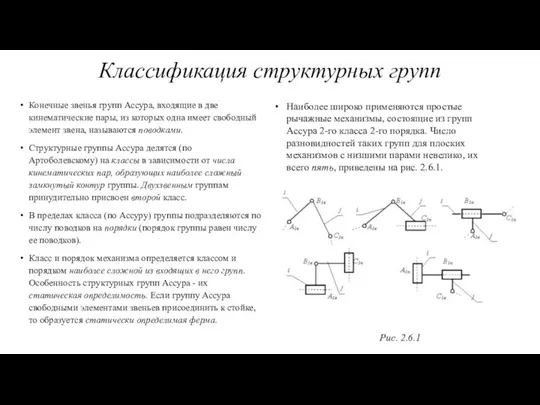
- 55. Классификация структурных групп Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет
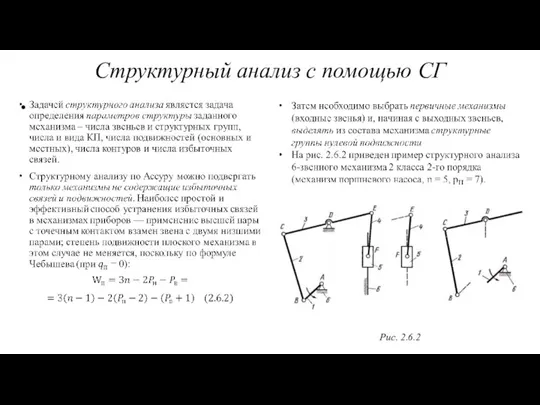
- 56. Структурный анализ с помощью СГ Рис. 2.6.2
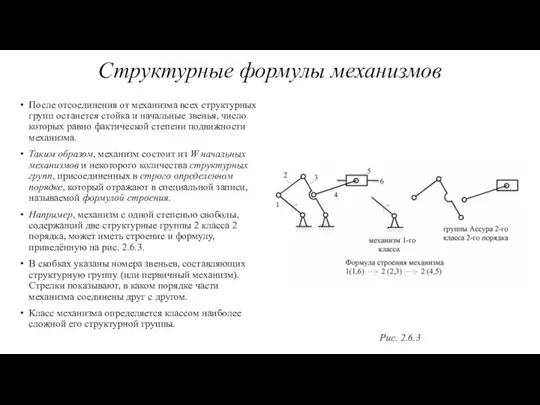
- 57. Структурные формулы механизмов После отсоединения от механизма всех структурных групп останется стойка и начальные звенья, число
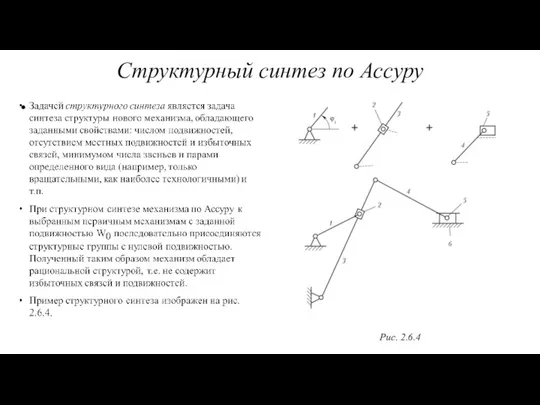
- 58. Структурный синтез по Ассуру Рис. 2.6.4
- 59. ДЗ №1
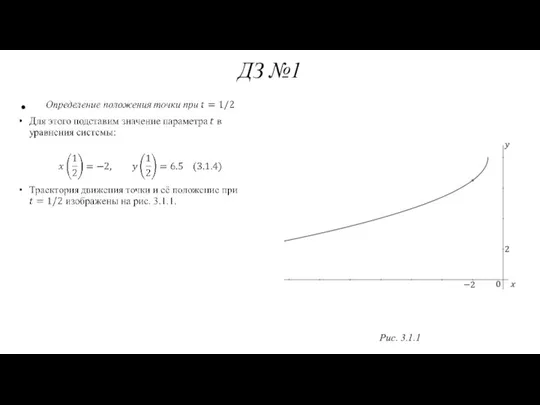
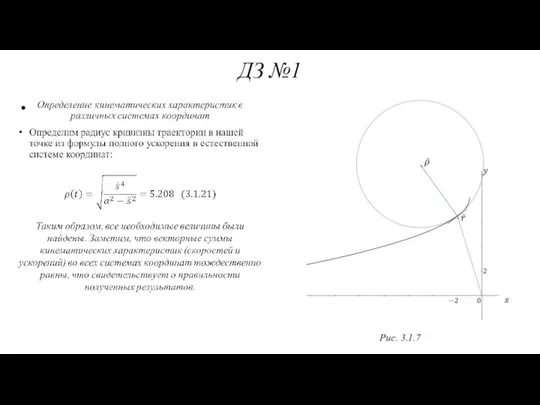
- 60. ДЗ №1 Рис. 3.1.1
- 61. ДЗ №1 Рис. 3.1.2
- 62. ДЗ №1 Рис. 3.1.3
- 63. ДЗ №1 Рис. 3.1.4
- 64. ДЗ №1 Рис. 3.1.5
- 65. ДЗ №1 Рис. 3.1.6
- 66. ДЗ №1 Рис. 3.1.7
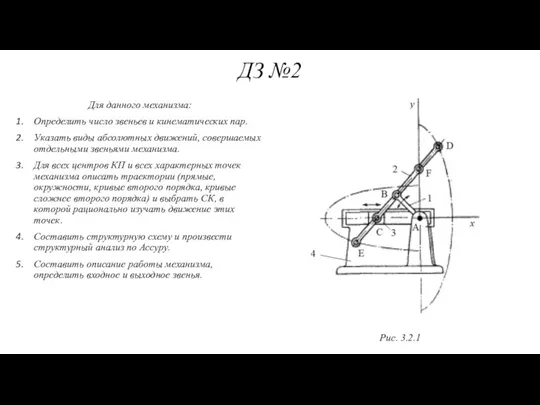
- 67. ДЗ №2 Для данного механизма: Определить число звеньев и кинематических пар. Указать виды абсолютных движений, совершаемых
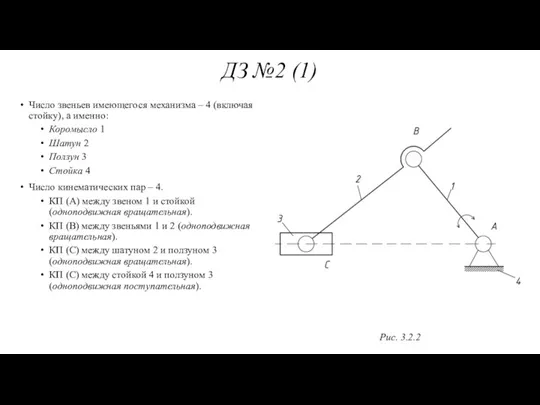
- 68. ДЗ №2 (1) Число звеньев имеющегося механизма – 4 (включая стойку), а именно: Коромысло 1 Шатун
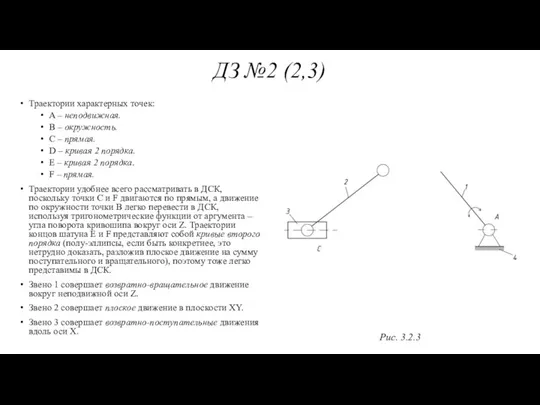
- 69. ДЗ №2 (2,3) Траектории характерных точек: A – неподвижная. B – окружность. C – прямая. D
- 70. ДЗ №2 (4,5) Представленный механизм может производить различную работу по превращению движения в зависимости от выбора
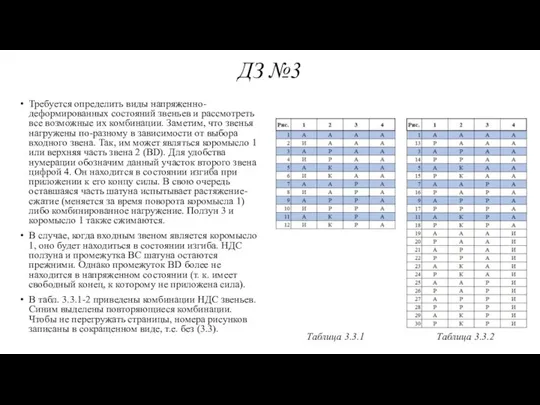
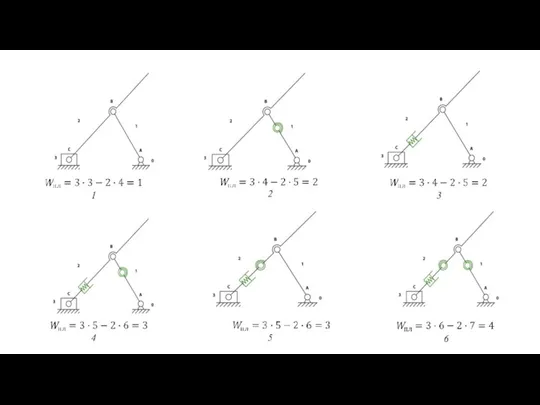
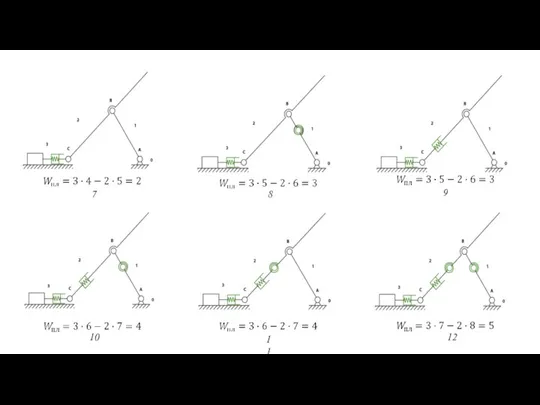
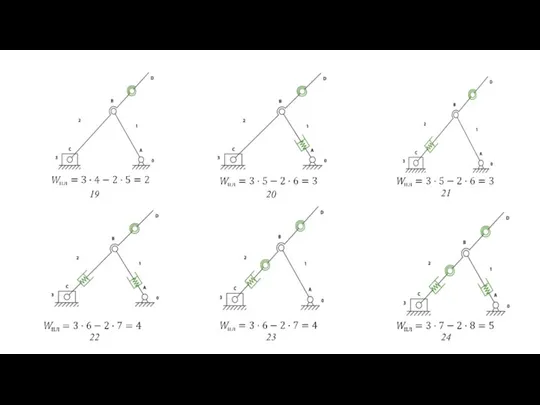
- 71. ДЗ №3 Требуется определить виды напряженно-деформированных состояний звеньев и рассмотреть все возможные их комбинации. Заметим, что
- 72. 1 2 3 4 5 6
- 73. 7 8 9 10 11 12
- 74. 13 14 15 16 17 18
- 75. 19 20 21 22 23 24
- 76. 25 26 27 28 29 30
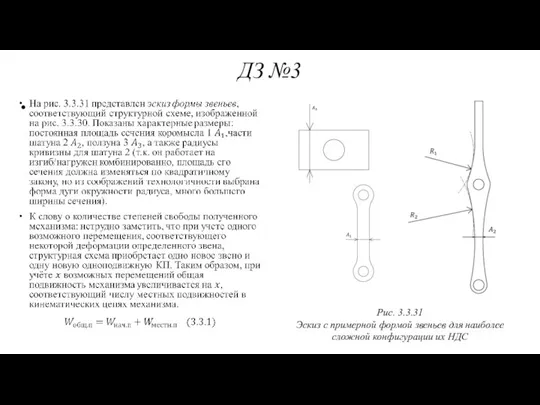
- 77. ДЗ №3 Рис. 3.3.31 Эскиз с примерной формой звеньев для наиболее сложной конфигурации их НДС
- 79. Скачать презентацию
Слайд 2Оглавление
Кинематика точки.
Дифференцирование вектора постоянного модуля…………………………………………………………………………….……………………..3
Кинематика точки в декартовой системе координат.……………………………………………………………………………………………...9
Кинематика точки в
Оглавление
Кинематика точки.
Дифференцирование вектора постоянного модуля…………………………………………………………………………….……………………..3
Кинематика точки в декартовой системе координат.……………………………………………………………………………………………...9
Кинематика точки в
Слайд 3Понятие вектора и производной
Рис. 1.1.1
Графическое изображение вектора и его обозначение
Понятие вектора и производной
Рис. 1.1.1
Графическое изображение вектора и его обозначение
Слайд 4Вектор-функции
Вектор-функции

Слайд 5Пространственная линия – годограф радиуса-вектора
Рис. 1.1.2
Пример вектор-функций (вверху слева) и изображений годографа
Пространственная линия – годограф радиуса-вектора
Рис. 1.1.2
Пример вектор-функций (вверху слева) и изображений годографа
Слайд 6Геометрический и физический смысл
Рис. 1.1.3
К геометрическому смыслу производной
S
M
y
x
z
Геометрический и физический смысл
Рис. 1.1.3
К геометрическому смыслу производной
S
M
y
x
z
Слайд 7
Рис. 1.1.4
Рис. 1.1.4

Слайд 9Материальная точка – идеализированная физическая модель, обладающее массой тело, размерами, формой, вращением
Материальная точка – идеализированная физическая модель, обладающее массой тело, размерами, формой, вращением
Слайд 10
Кинематика в ДСК
Рис. 1.2.3
Кинематика в ДСК
Рис. 1.2.3
Слайд 11
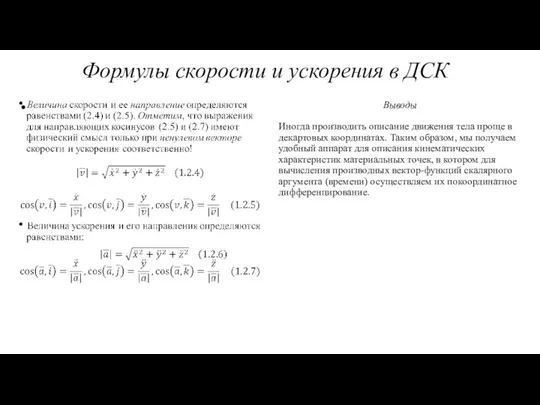
Формулы скорости и ускорения в ДСК
Рис. 1.2.4
Формулы скорости и ускорения в ДСК
Рис. 1.2.4
Слайд 12
Выводы
Иногда производить описание движения тела проще в декартовых координатах. Таким образом, мы
Выводы
Иногда производить описание движения тела проще в декартовых координатах. Таким образом, мы
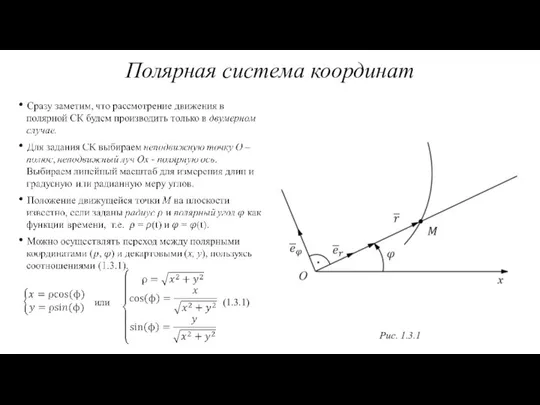
Слайд 13Полярная система координат
Рис. 1.3.1
или
(1.3.1)
Полярная система координат
Рис. 1.3.1
или
(1.3.1)
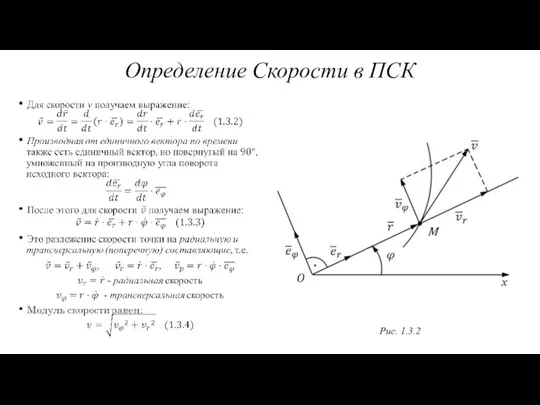
Слайд 14
Рис. 1.3.2
Определение Скорости в ПСК
Рис. 1.3.2
Определение Скорости в ПСК
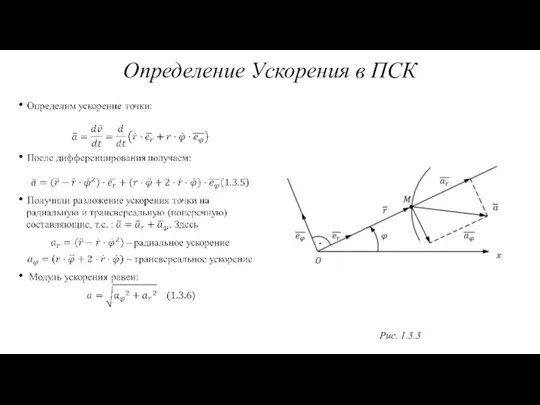
Слайд 15Определение Ускорения в ПСК
Рис. 1.3.3
Определение Ускорения в ПСК
Рис. 1.3.3
Слайд 16Для определения закона движения точки в естественной системе координат нам необходимо:
Знать траекторию
Для определения закона движения точки в естественной системе координат нам необходимо:
Знать траекторию
Слайд 17
Касательная, главная нормаль и радиус кривизны
Касательная, главная нормаль и радиус кривизны
Слайд 18
Кривизна и радиус кривизны плоской кривой
Кривизна и радиус кривизны плоской кривой
Слайд 19
Определение скорости и ускорения
Рис. 1.4.3
Определение скорости и ускорения
Рис. 1.4.3
Слайд 20
Определение скорости и ускорения
Рис. 1.4.4
Определение скорости и ускорения
Рис. 1.4.4
Слайд 21
Определение сложного движения
Рис. 1.5.1
Определение сложного движения
Рис. 1.5.1
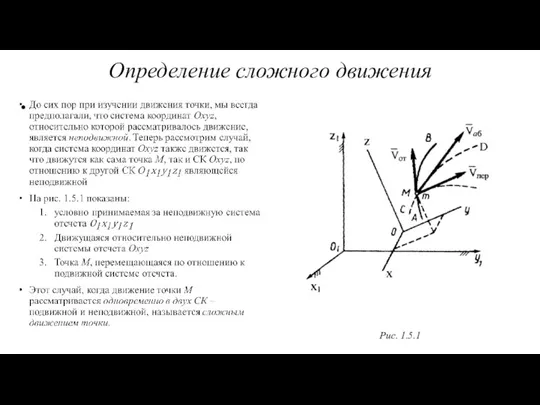
Слайд 22Движение точки M по отношению к неподвижной системе отсчета – абсолютное движение. Её скорость
Движение точки M по отношению к неподвижной системе отсчета – абсолютное движение. Её скорость
Слайд 23
Теорема о сложении скоростей
Рис. 1.5.2
Теорема о сложении скоростей
Рис. 1.5.2

Слайд 24
Теорема о сложении скоростей
Теорема о сложении скоростей

Слайд 25
Рис. 1.5.3
Теорема о сложении ускорений
Рис. 1.5.3
Теорема о сложении ускорений
Слайд 26
Теорема о сложении ускорений
Теорема о сложении ускорений

Слайд 27Твёрдое тело (ТТ) – система материальных точек.
Абсолютно твёрдое тело – идеализированная механическая
Твёрдое тело (ТТ) – система материальных точек.
Абсолютно твёрдое тело – идеализированная механическая
Слайд 28
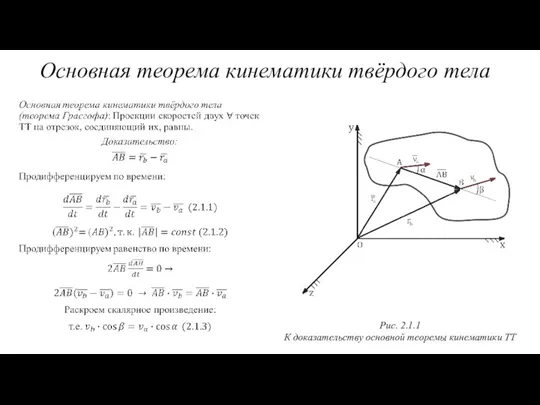
Рис. 2.1.1
К доказательству основной теоремы кинематики ТТ
Основная теорема кинематики твёрдого тела
Рис. 2.1.1
К доказательству основной теоремы кинематики ТТ
Основная теорема кинематики твёрдого тела
Слайд 29Поступательное движение ТТ – такое движение твердого тела, при котором любая прямая,
Поступательное движение ТТ – такое движение твердого тела, при котором любая прямая,
Слайд 30
Рис. 2.2.2
к теореме поступательного движения ТТ
Доказательство теоремы поступательного движения
Рис. 2.2.2
к теореме поступательного движения ТТ
Доказательство теоремы поступательного движения
Слайд 31
Вращение твердого тела вокруг неподвижной оси
Вращение твердого тела вокруг неподвижной оси
Слайд 32
Рис. 2.3.1
вращательное движение тела
Вращение твердого тела вокруг неподвижной оси
Рис. 2.3.1
вращательное движение тела
Вращение твердого тела вокруг неподвижной оси
Слайд 33
Рис. 2.3.2
к определению направления углового ускорения
(вращение вокруг неподвижной оси)
Вращение твердого тела вокруг
Рис. 2.3.2
к определению направления углового ускорения
(вращение вокруг неподвижной оси)
Вращение твердого тела вокруг
Слайд 34
Рис. 2.3.3
Кинематика точки ТТ в ЕСК
Вращение твердого тела вокруг неподвижной оси
Рис. 2.3.3
Кинематика точки ТТ в ЕСК
Вращение твердого тела вокруг неподвижной оси

Слайд 35
Рис. 2.3.4
к векторному представлению кинематических характеристик точки ТТ
Вращение твердого тела вокруг неподвижной
Рис. 2.3.4
к векторному представлению кинематических характеристик точки ТТ
Вращение твердого тела вокруг неподвижной
Слайд 36Определение
Плоскопараллельным (или просто плоским) движением твёрдого тела называют такое движение, при котором
Определение
Плоскопараллельным (или просто плоским) движением твёрдого тела называют такое движение, при котором
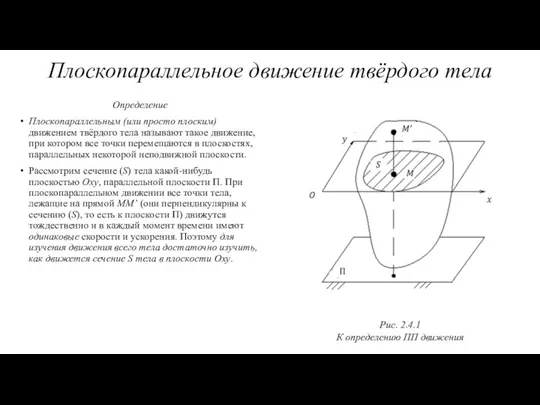
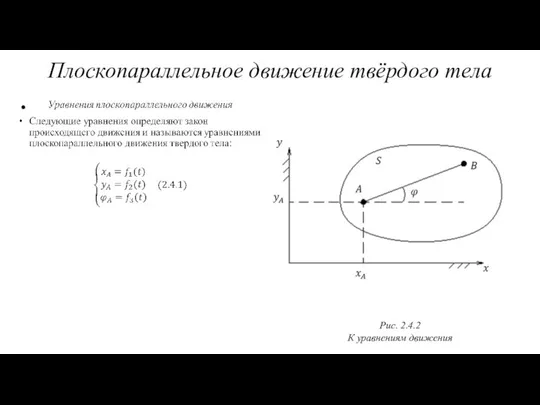
Слайд 37
Рис. 2.4.2
К уравнениям движения
Плоскопараллельное движение твёрдого тела
Рис. 2.4.2
К уравнениям движения
Плоскопараллельное движение твёрдого тела
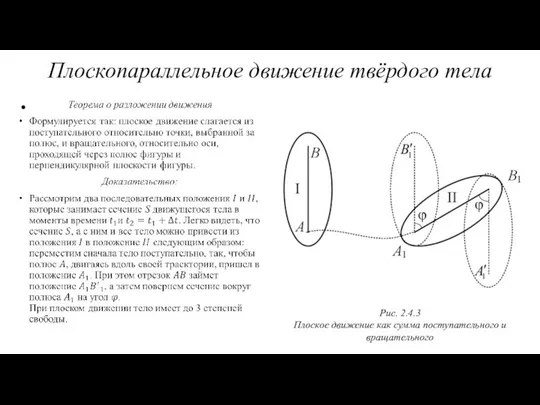
Слайд 38
Рис. 2.4.3
Плоское движение как сумма поступательного и вращательного
Плоскопараллельное движение твёрдого тела
Рис. 2.4.3
Плоское движение как сумма поступательного и вращательного
Плоскопараллельное движение твёрдого тела
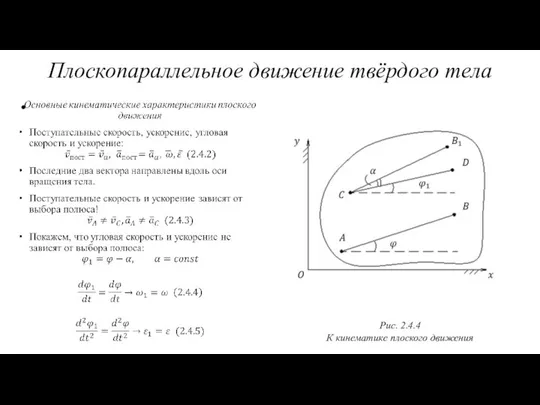
Слайд 39
Рис. 2.4.4
К кинематике плоского движения
Плоскопараллельное движение твёрдого тела
Рис. 2.4.4
К кинематике плоского движения
Плоскопараллельное движение твёрдого тела
Слайд 40
Рис. 2.4.5
К теореме о представлении скоростей
Плоскопараллельное движение твёрдого тела
Рис. 2.4.5
К теореме о представлении скоростей
Плоскопараллельное движение твёрдого тела
Слайд 41
Плоскопараллельное движение твёрдого тела
Плоскопараллельное движение твёрдого тела
Слайд 42
Мгновенный центр скоростей
Рис. 2.4.6
Мгновенный центр скоростей
Рис. 2.4.6
Слайд 43
Мгновенный центр ускорений
Так, ускорение любой точки тела есть векторная сумма ускорения полюса
Мгновенный центр ускорений
Так, ускорение любой точки тела есть векторная сумма ускорения полюса
Слайд 44
Мгновенный центр ускорений
Рис. 2.4.7
Мгновенный центр ускорений
Мгновенный центр ускорений
Рис. 2.4.7
Мгновенный центр ускорений
Слайд 45Основные понятия ТММ
Теория механизмов и машин занимается созданием и изучением высокопроизводительных механизмов
Основные понятия ТММ
Теория механизмов и машин занимается созданием и изучением высокопроизводительных механизмов
Слайд 46Разновидности звеньев
Звено – либо одна деталь, либо совокупность нескольких деталей, соединенных в
Разновидности звеньев
Звено – либо одна деталь, либо совокупность нескольких деталей, соединенных в
Слайд 47Кинематические пары и цепи
Кинематическая пара – подвижное соединение звеньев, допускающее их относительное
Кинематические пары и цепи
Кинематическая пара – подвижное соединение звеньев, допускающее их относительное
Слайд 48Классификация кинематических пар
Классификация кинематических пар
Слайд 49Классификация кинематических пар (продолжение)
Цилиндрическая пара (рис. 2.5.3, в) – двухподвижная (2 ц),
Классификация кинематических пар (продолжение)
Цилиндрическая пара (рис. 2.5.3, в) – двухподвижная (2 ц),
Слайд 50Классификация кинематических пар (продолжение)
Таблица 2.5.1
Классификация кинематических пар
Классификация кинематических пар (продолжение)
Таблица 2.5.1
Классификация кинематических пар
Слайд 51Степень подвижности
Таблица 2.5.2
Классификация кинематических пар по числу степеней свободы и числу связей
Степень подвижности
Таблица 2.5.2
Классификация кинематических пар по числу степеней свободы и числу связей
Слайд 52Степень подвижности плоского механизма
Степень подвижности плоского механизма
Слайд 53Степень подвижности плоского механизма
Степень подвижности плоского механизма
Слайд 54Структурные группы Ассура
Структурные группы Ассура
Слайд 55Классификация структурных групп
Конечные звенья групп Ассура, входящие в две кинематические пары, из
Классификация структурных групп
Конечные звенья групп Ассура, входящие в две кинематические пары, из
Слайд 56Структурный анализ с помощью СГ
Рис. 2.6.2
Структурный анализ с помощью СГ
Рис. 2.6.2
Слайд 57Структурные формулы механизмов
После отсоединения от механизма всех структурных групп останется стойка и
Структурные формулы механизмов
После отсоединения от механизма всех структурных групп останется стойка и
Слайд 58Структурный синтез по Ассуру
Рис. 2.6.4
Структурный синтез по Ассуру
Рис. 2.6.4
Слайд 59ДЗ №1
ДЗ №1

Слайд 60ДЗ №1
Рис. 3.1.1
ДЗ №1
Рис. 3.1.1
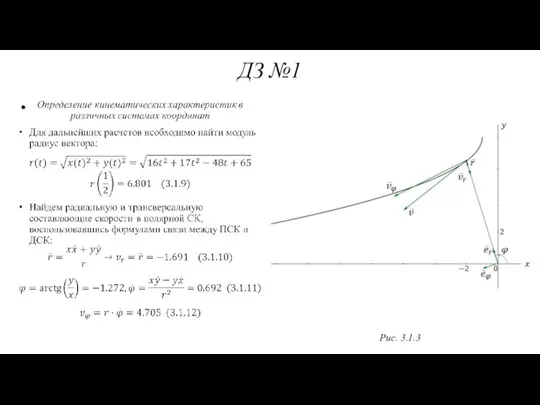
Слайд 61ДЗ №1
Рис. 3.1.2
ДЗ №1
Рис. 3.1.2

Слайд 62ДЗ №1
Рис. 3.1.3
ДЗ №1
Рис. 3.1.3
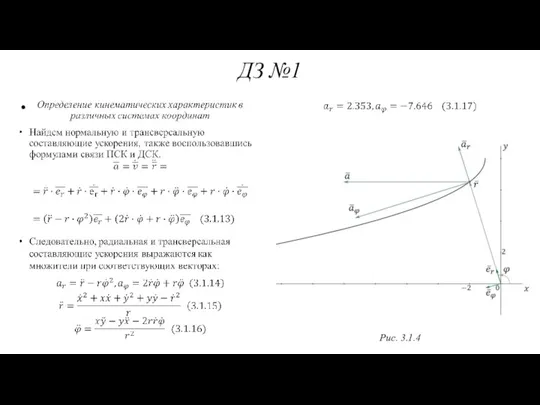
Слайд 63ДЗ №1
Рис. 3.1.4
ДЗ №1
Рис. 3.1.4
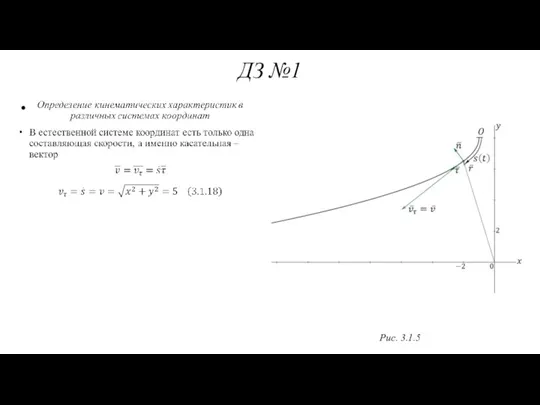
Слайд 64ДЗ №1
Рис. 3.1.5
ДЗ №1
Рис. 3.1.5
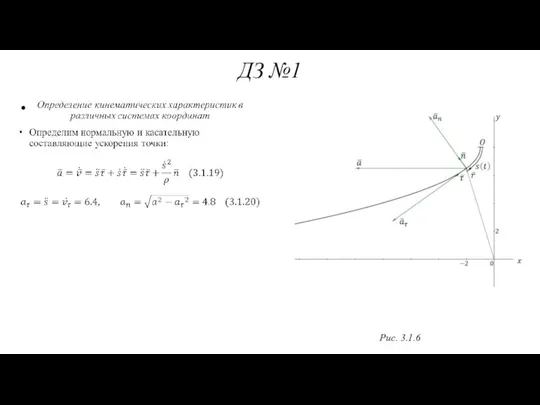
Слайд 65ДЗ №1
Рис. 3.1.6
ДЗ №1
Рис. 3.1.6
Слайд 66ДЗ №1
Рис. 3.1.7
ДЗ №1
Рис. 3.1.7
Слайд 67ДЗ №2
Для данного механизма:
Определить число звеньев и кинематических пар.
Указать виды абсолютных движений,
ДЗ №2
Для данного механизма:
Определить число звеньев и кинематических пар.
Указать виды абсолютных движений,
Слайд 68ДЗ №2 (1)
Число звеньев имеющегося механизма – 4 (включая стойку), а именно:
Коромысло
ДЗ №2 (1)
Число звеньев имеющегося механизма – 4 (включая стойку), а именно:
Коромысло
Слайд 69ДЗ №2 (2,3)
Траектории характерных точек:
A – неподвижная.
B – окружность.
C – прямая.
D –
ДЗ №2 (2,3)
Траектории характерных точек:
A – неподвижная.
B – окружность.
C – прямая.
D –
Слайд 70ДЗ №2 (4,5)
Представленный механизм может производить различную работу по превращению движения в
ДЗ №2 (4,5)
Представленный механизм может производить различную работу по превращению движения в

Слайд 71ДЗ №3
Требуется определить виды напряженно-деформированных состояний звеньев и рассмотреть все возможные их
ДЗ №3
Требуется определить виды напряженно-деформированных состояний звеньев и рассмотреть все возможные их
Слайд 721
2
3
4
5
6
1
2
3
4
5
6
Слайд 737
8
9
10
11
12
7
8
9
10
11
12
Слайд 7413
14
15
16
17
18
13
14
15
16
17
18

Слайд 7519
20
21
22
23
24
19
20
21
22
23
24
Слайд 7625
26
27
28
29
30
25
26
27
28
29
30

Слайд 77ДЗ №3
Рис. 3.3.31
Эскиз с примерной формой звеньев для наиболее сложной конфигурации их
ДЗ №3
Рис. 3.3.31
Эскиз с примерной формой звеньев для наиболее сложной конфигурации их
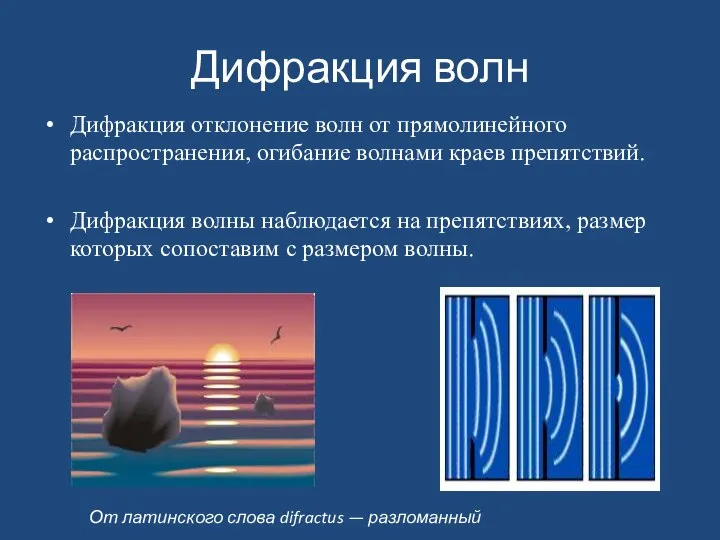 Дифракция волн
Дифракция волн Презентация-ФТП (Тема3-деф и разруш)-17
Презентация-ФТП (Тема3-деф и разруш)-17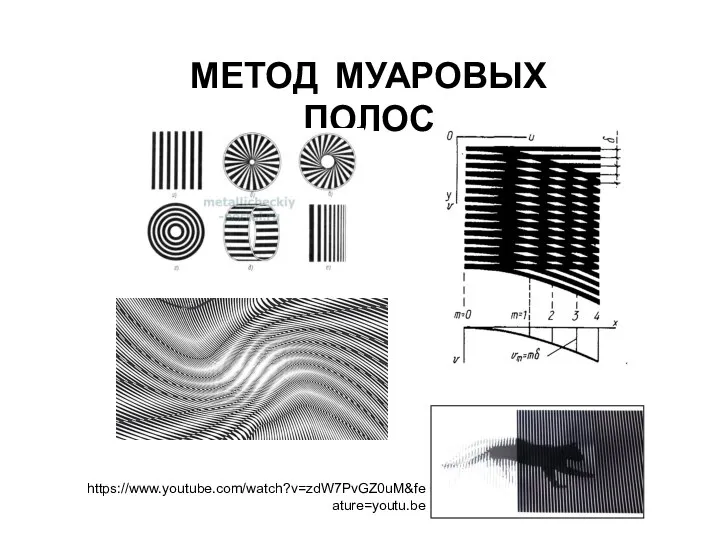 Метод муаровых полос. Параметры муаровых полос
Метод муаровых полос. Параметры муаровых полос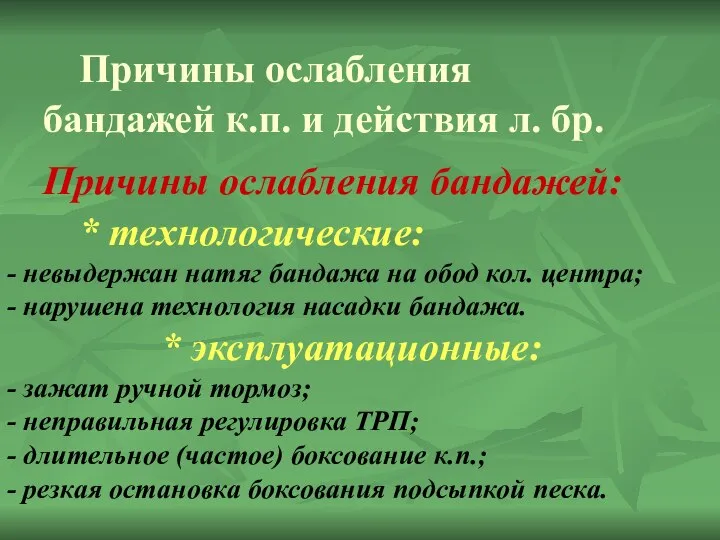 Причины ослабления бандажей
Причины ослабления бандажей Произвольная плоская система сил
Произвольная плоская система сил Скорость истечения и расход жидкости для различных форм отверстий
Скорость истечения и расход жидкости для различных форм отверстий Гидростатика
Гидростатика Модельный ряд двигателей ЗМЗ
Модельный ряд двигателей ЗМЗ ТЭД. Теория электролитической диссоциации
ТЭД. Теория электролитической диссоциации Statika
Statika Электромагнитная природа света. Интерференция света. Лекции 12-13
Электромагнитная природа света. Интерференция света. Лекции 12-13 Презентация на тему Равномерное движение
Презентация на тему Равномерное движение  Звуковые волны
Звуковые волны Закон всемирного тяготения
Закон всемирного тяготения Колыбель Ньютона
Колыбель Ньютона Uc565ikZBwoOgty3Z82tcg
Uc565ikZBwoOgty3Z82tcg Проектирование систем электрооборудования автономных объектов
Проектирование систем электрооборудования автономных объектов Технологический процесс монтажа устройства для формовки протектора
Технологический процесс монтажа устройства для формовки протектора Скорость в механическом движении. 7 класс
Скорость в механическом движении. 7 класс 9_lektsia_-geometr_kharakt
9_lektsia_-geometr_kharakt Решение задач по теме Закон всемирного тяготения
Решение задач по теме Закон всемирного тяготения Кроссворды по физике
Кроссворды по физике Zpětné vazby
Zpětné vazby Построение внешнего и внутреннего сопряжений
Построение внешнего и внутреннего сопряжений Магнитодиэлектрический эффект в нанокристаллическом мультиферроике BiFeO3
Магнитодиэлектрический эффект в нанокристаллическом мультиферроике BiFeO3 Закон преломления света
Закон преломления света Активные диэлектрики. Сегнетоэлектрики. Пьезоэлектрики
Активные диэлектрики. Сегнетоэлектрики. Пьезоэлектрики Принцип Даламбера для материальной точки. Лекция 2
Принцип Даламбера для материальной точки. Лекция 2