- Теория управления. Тест

Содержание
- 2. Условия обучения По итогам изучения дисциплины проводится экзамен В течение семестра необходимо выполнить все задания по
- 3. Список литературы 1. Бесекерский В.Л., Попов Е.П. Теория систем автоматического управления. СПб.: Профессия, 2003. 2. Теория
- 4. Темы дисциплины Управление и информатика, построение модели простого объекта, общие принципы системной организации, построение передаточной функции,
- 5. Темы дисциплины Проблема устойчивости, типовые элементарные звенья, интегрирующее звено, апериодическое звено, колебательное звено, дифференцирующее звено, соединение
- 6. (задания к тесту)
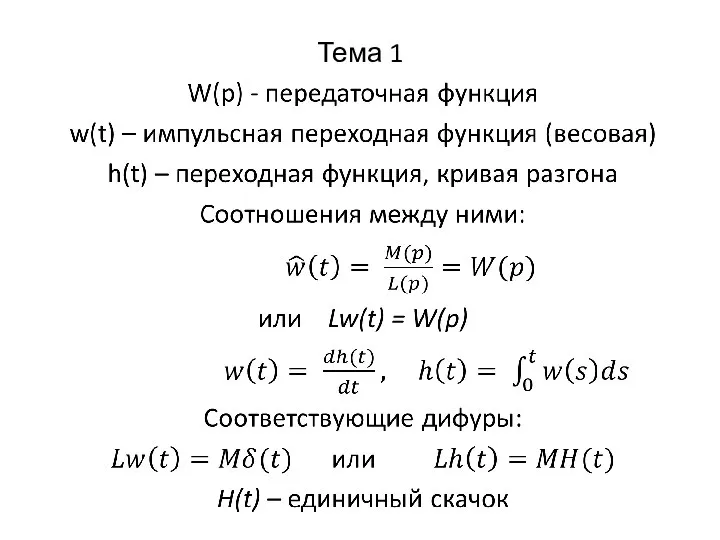
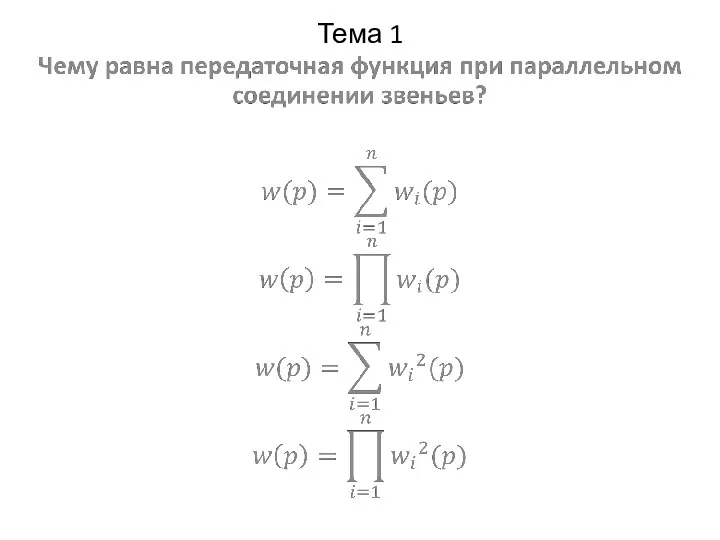
- 7. Тема 1
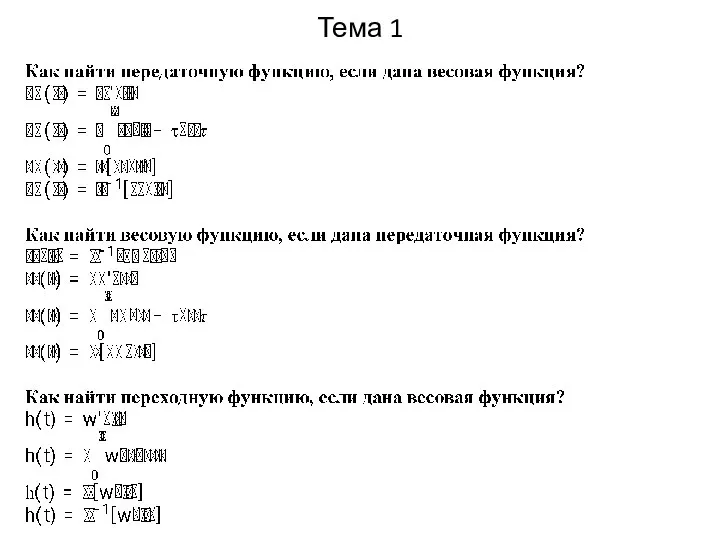
- 8. Тема 1
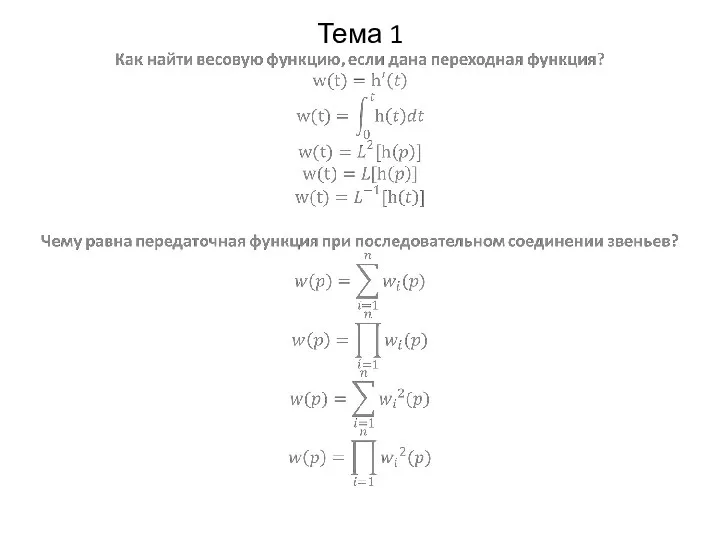
- 9. Тема 1
- 10. Тема 1
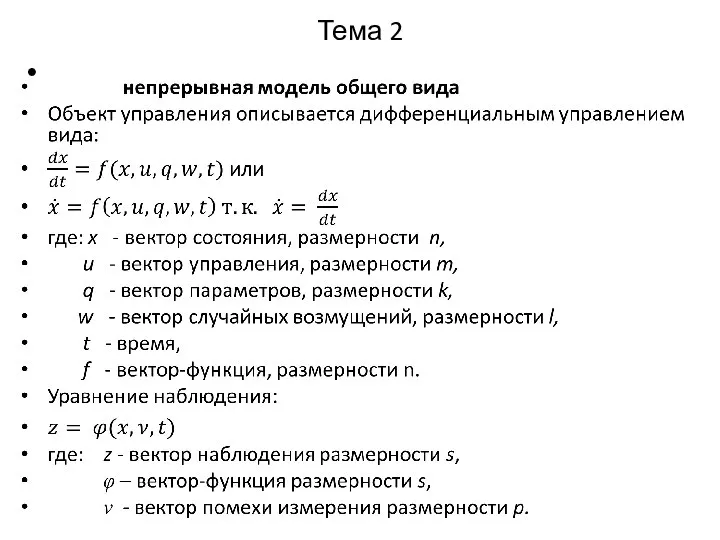
- 11. Тема 2
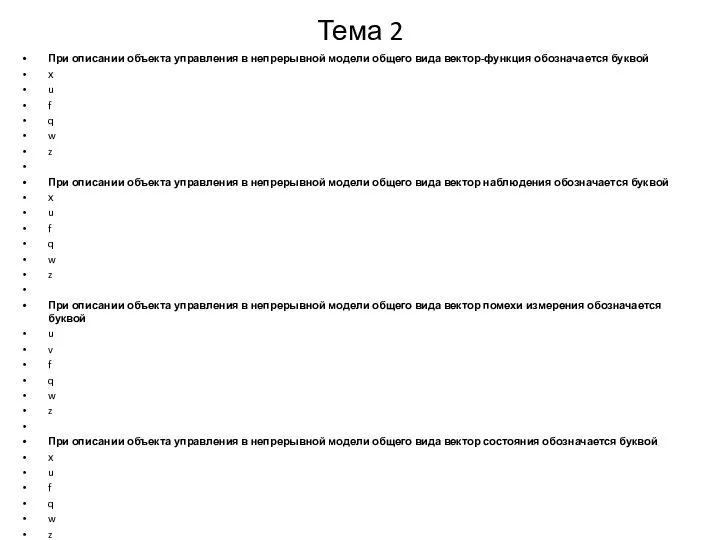
- 12. Тема 2 При описании объекта управления в непрерывной модели общего вида вектор-функция обозначается буквой х u
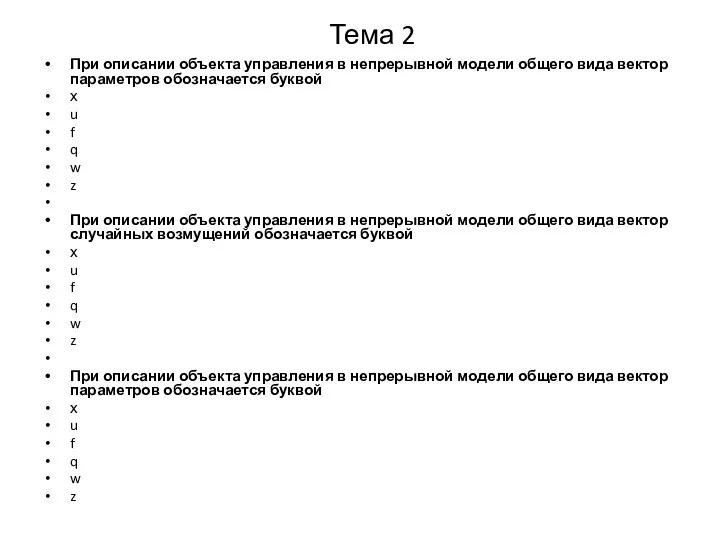
- 13. Тема 2 При описании объекта управления в непрерывной модели общего вида вектор параметров обозначается буквой х
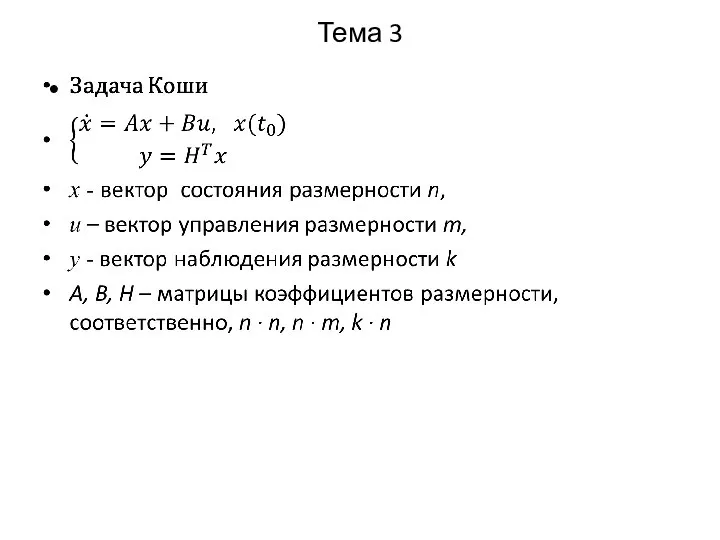
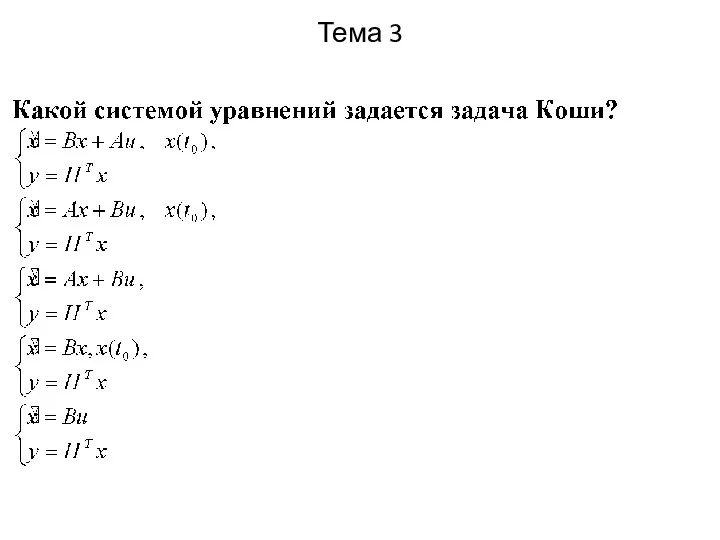
- 14. Тема 3
- 15. Тема 3
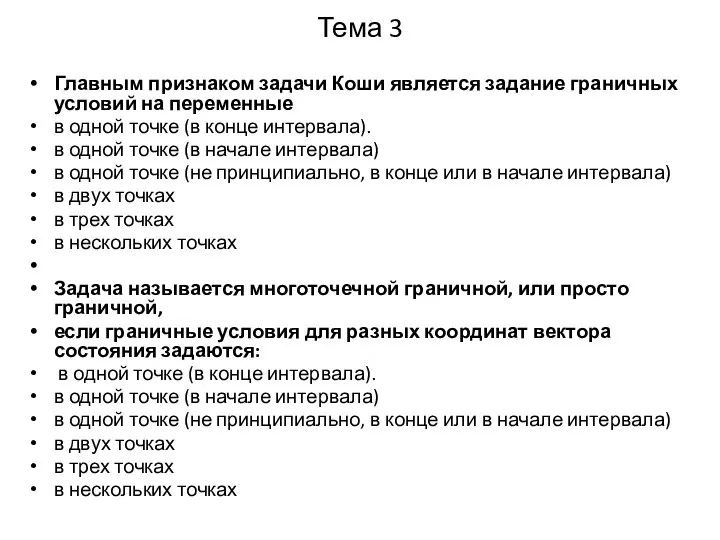
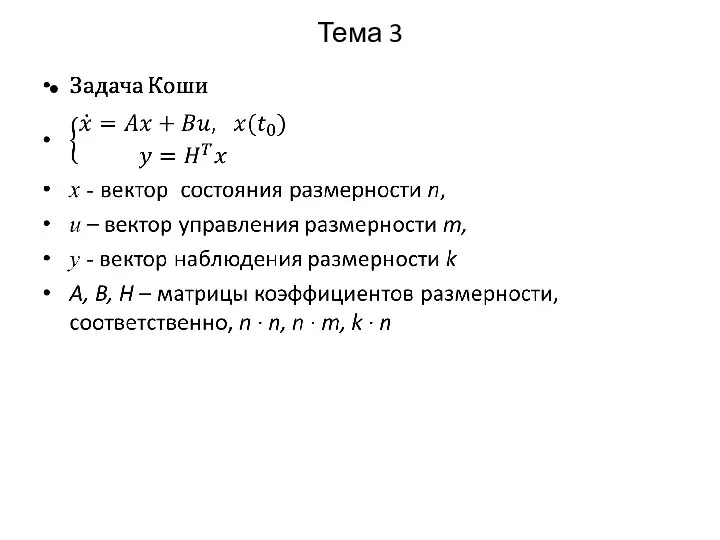
- 16. Тема 3 Главным признаком задачи Коши является задание граничных условий на переменные в одной точке (в
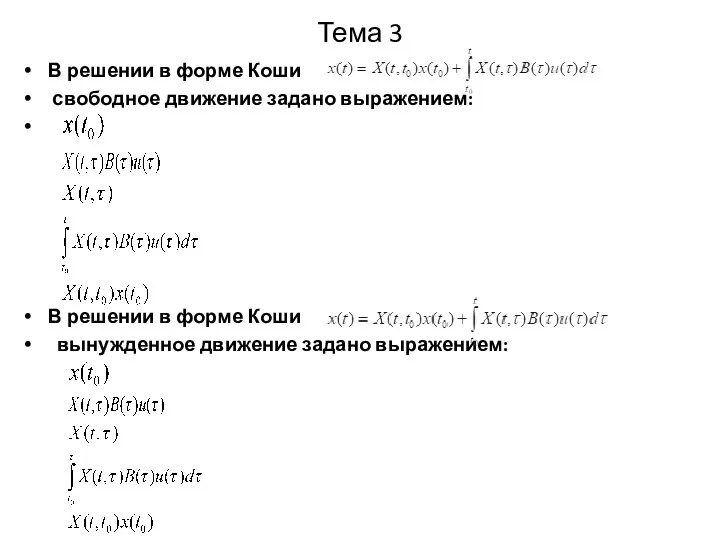
- 17. Тема 3 В решении в форме Коши свободное движение задано выражением: В решении в форме Коши
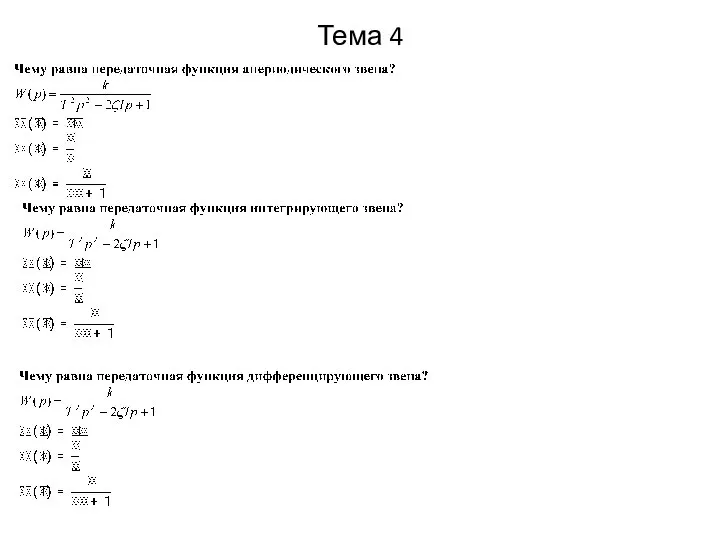
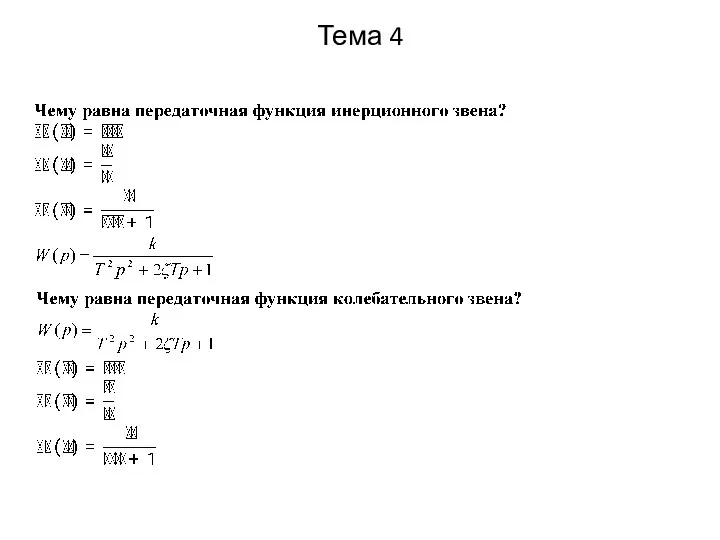
- 18. Тема 4
- 19. Тема 4
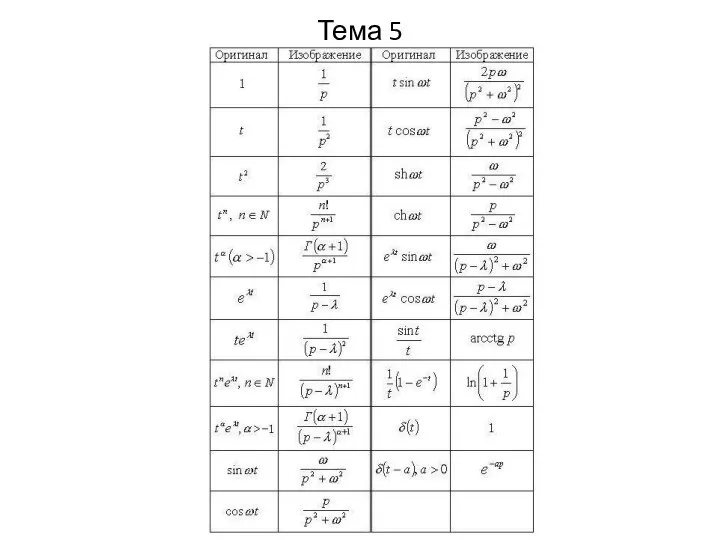
- 20. Тема 5
- 21. Тема 5
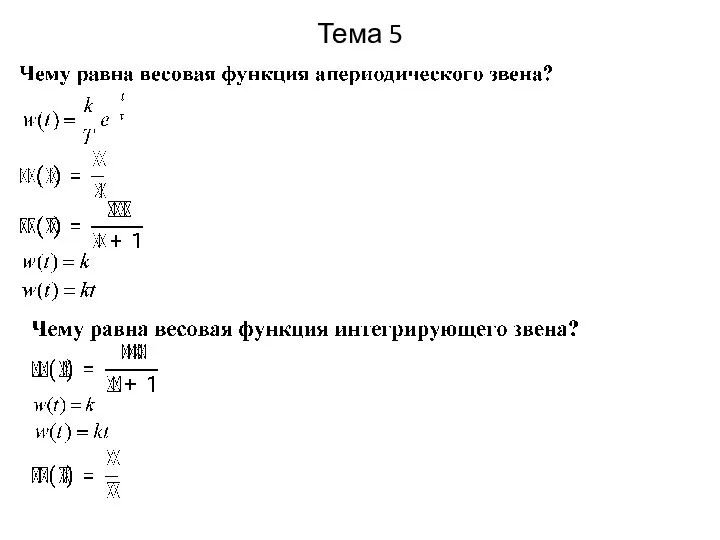
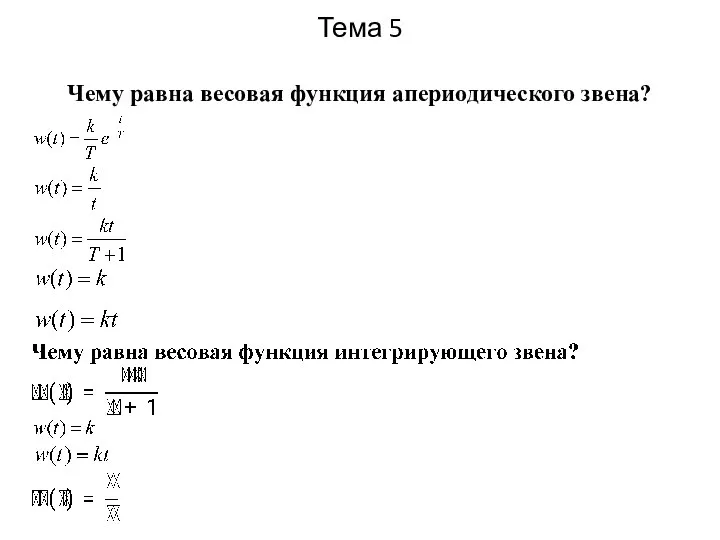
- 22. Тема 5 Чему равна весовая функция апериодического звена?
- 23. Тема 5
- 24. Тема 6
- 25. Тема 6
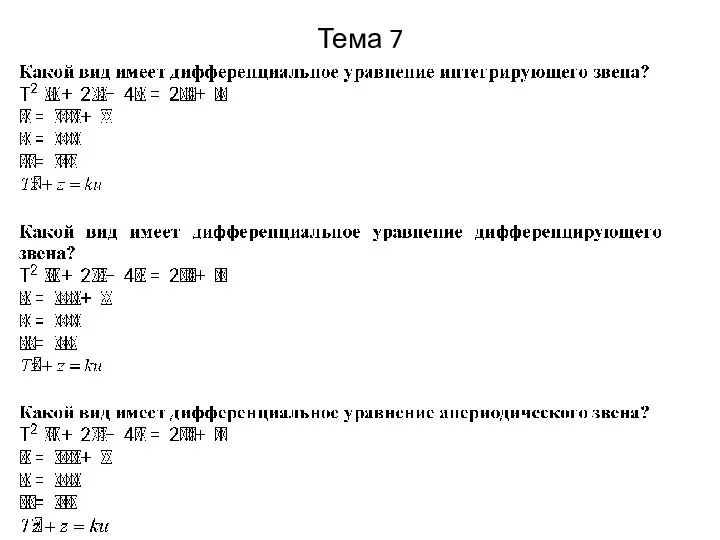
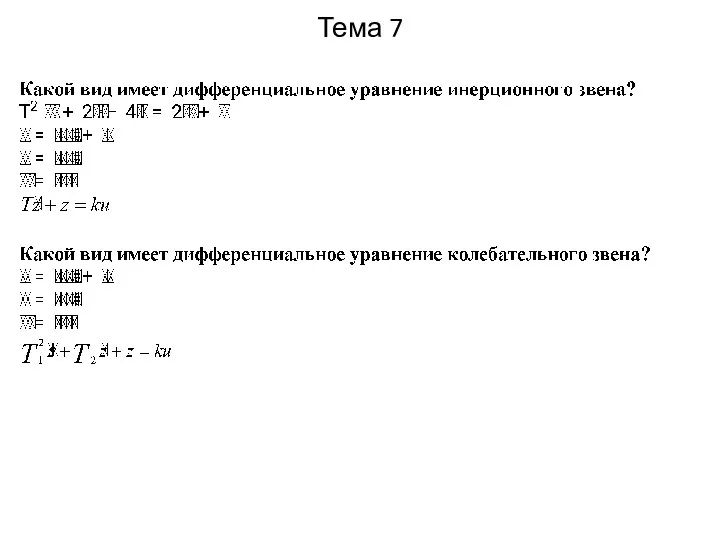
- 26. Тема 7
- 27. Тема 7
- 28. Тема 3
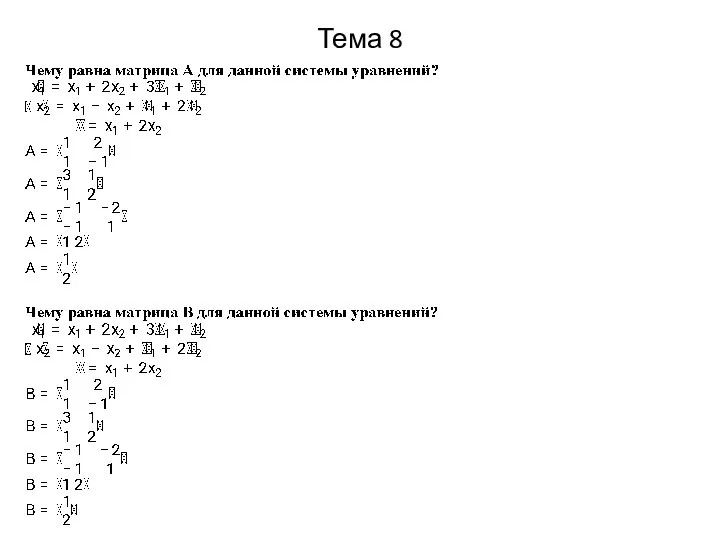
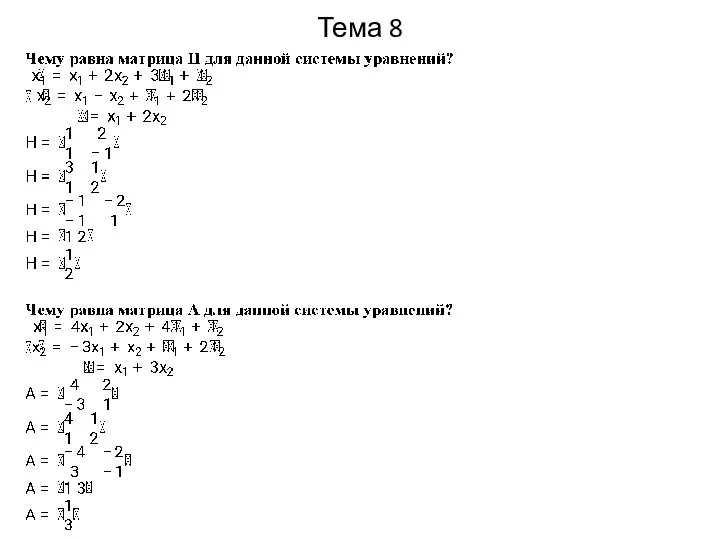
- 29. Тема 8
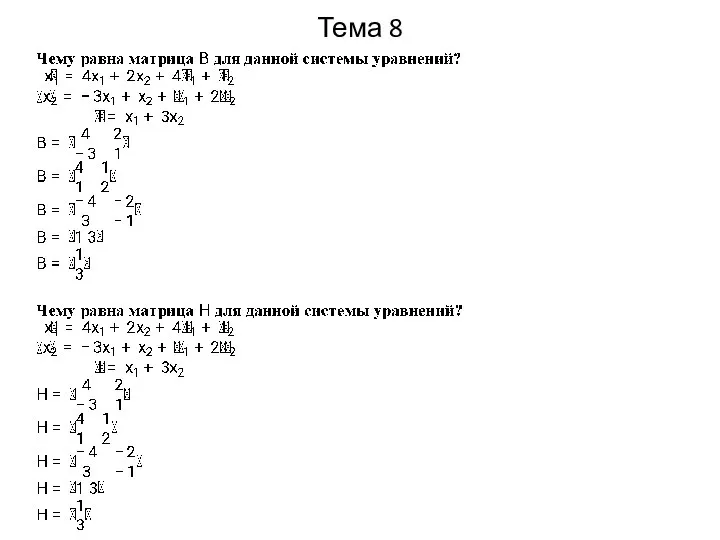
- 30. Тема 8
- 31. Тема 8
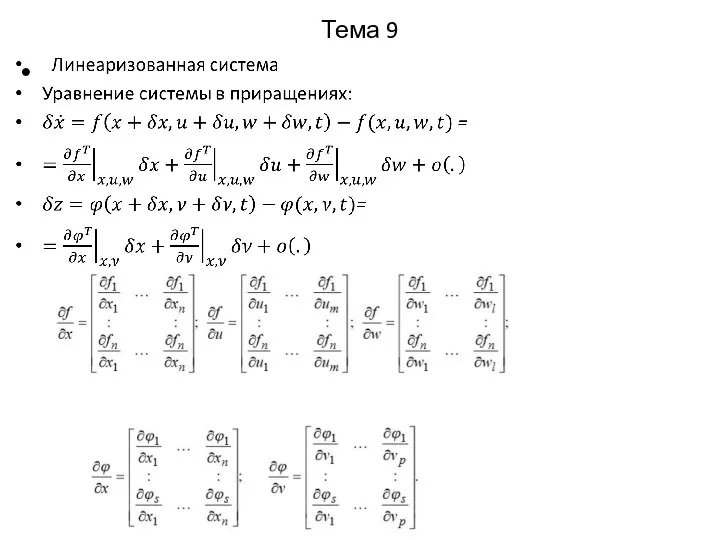
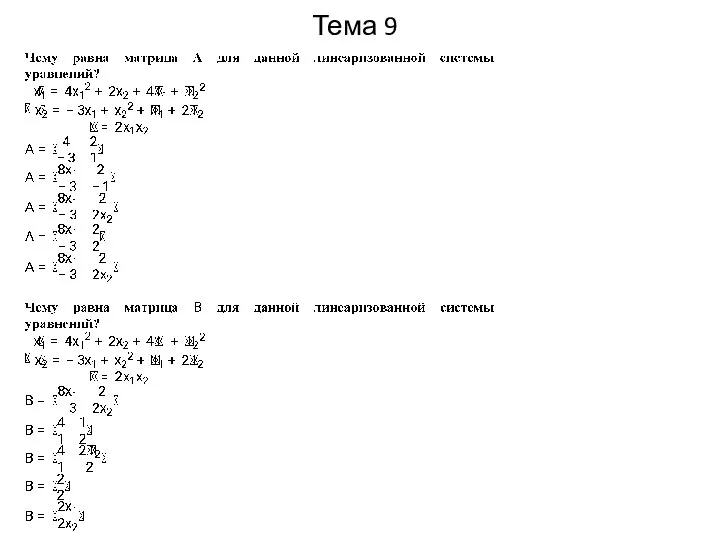
- 32. Тема 9
- 33. Тема 9
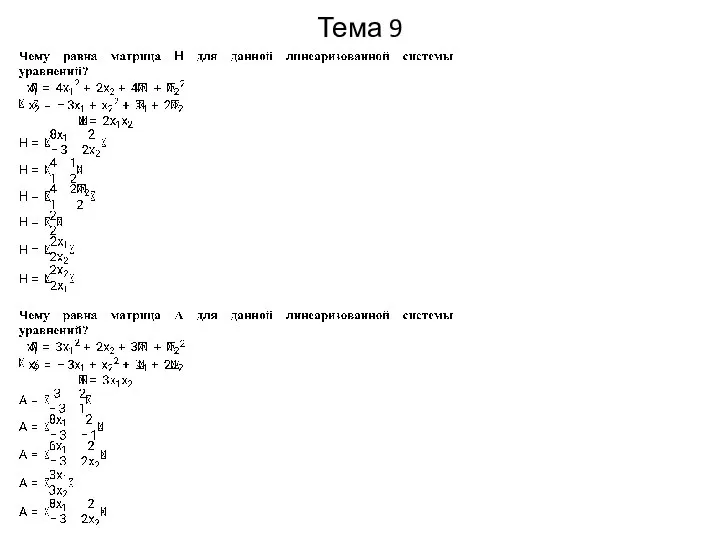
- 34. Тема 9
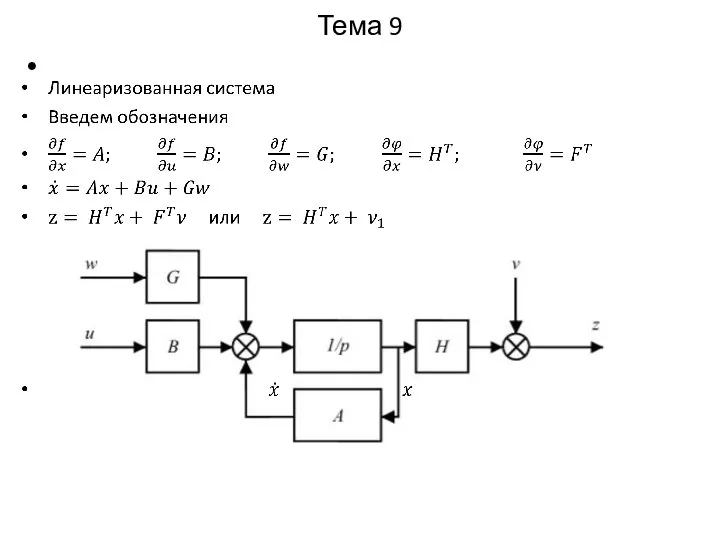
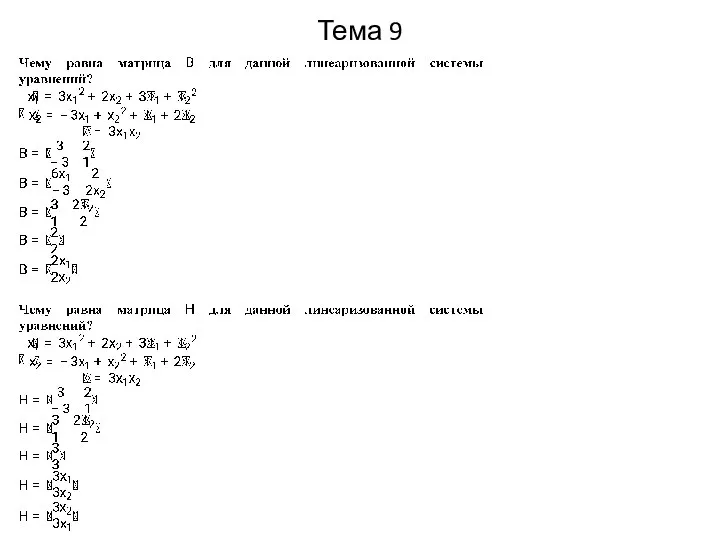
- 35. Тема 9
- 36. Тема 9
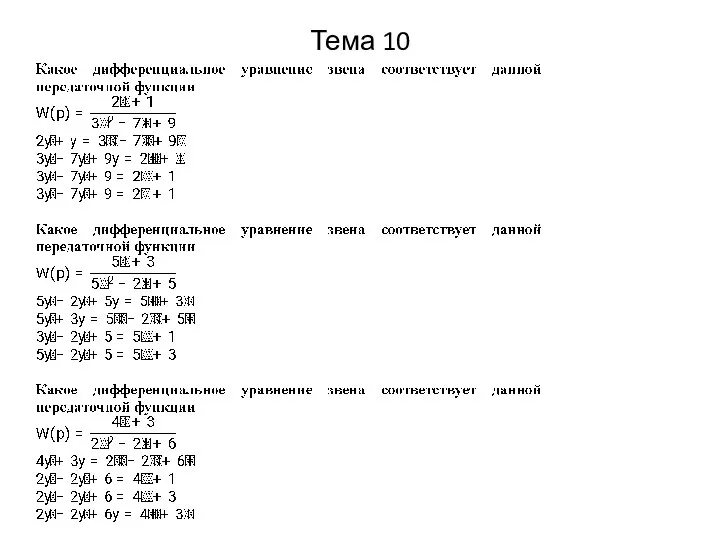
- 37. Тема 10
- 38. Тема 10
- 39. Тема 11
- 40. Тема 11
- 41. Тема 11
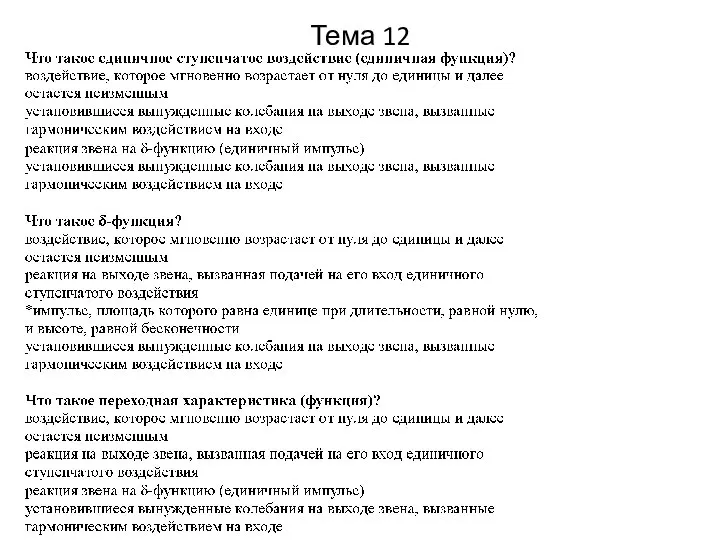
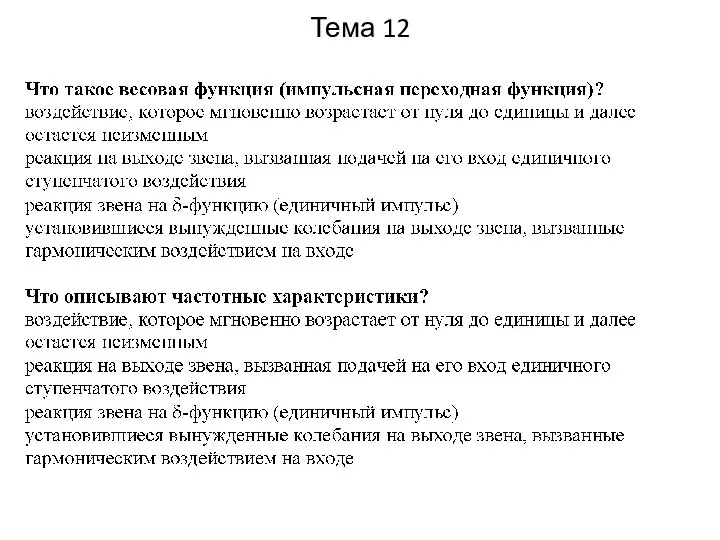
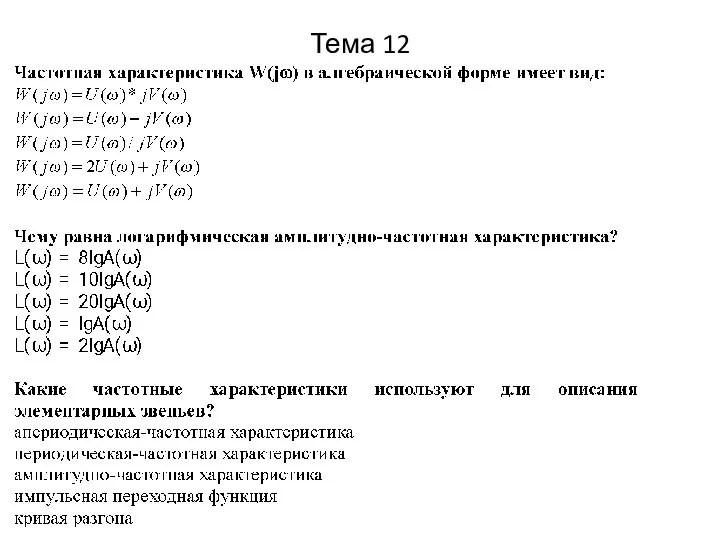
- 42. Тема 12
- 43. Тема 12
- 44. Тема 12
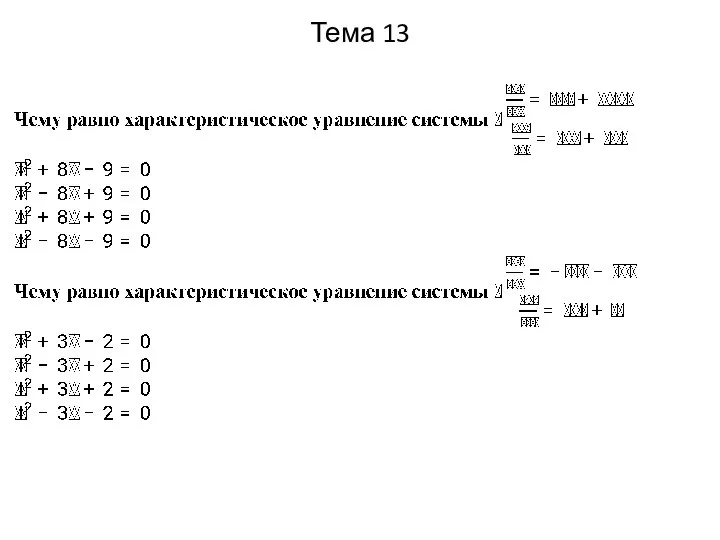
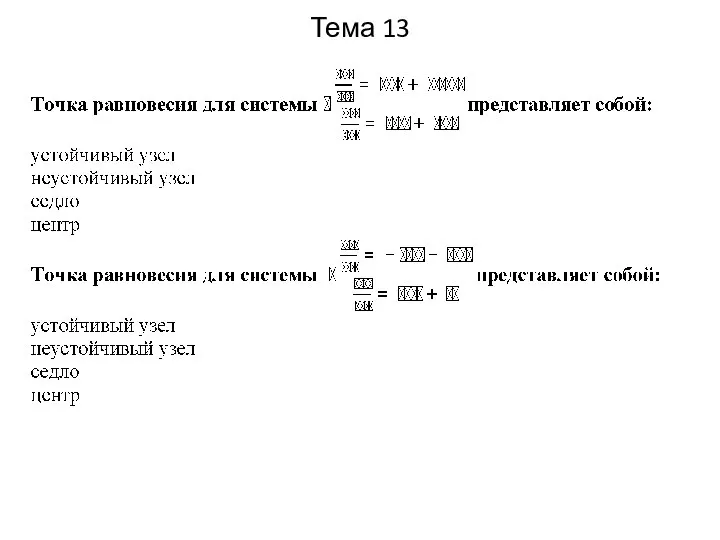
- 45. Тема 13
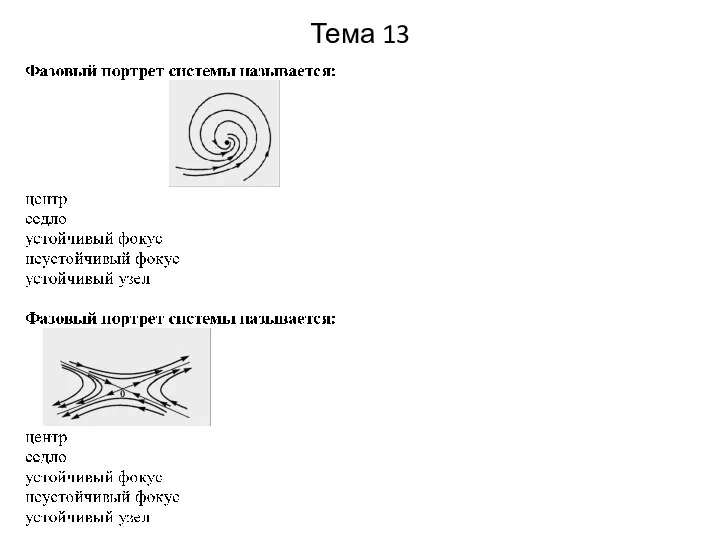
- 46. Тема 13
- 47. Тема 13
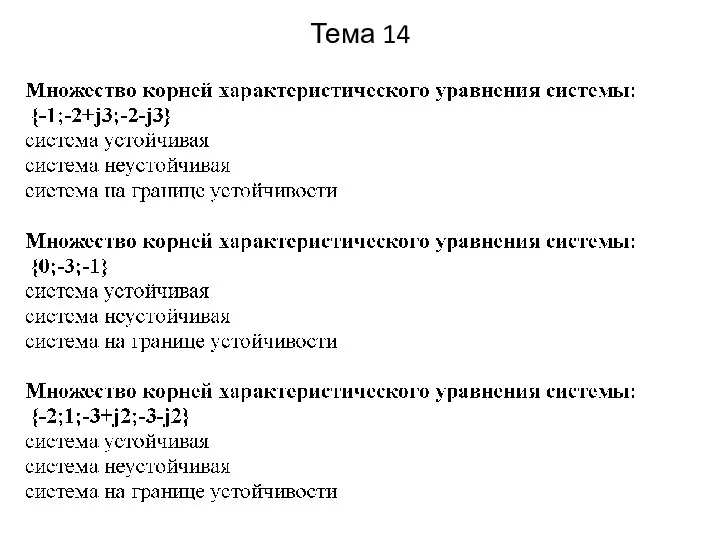
- 48. Тема 14
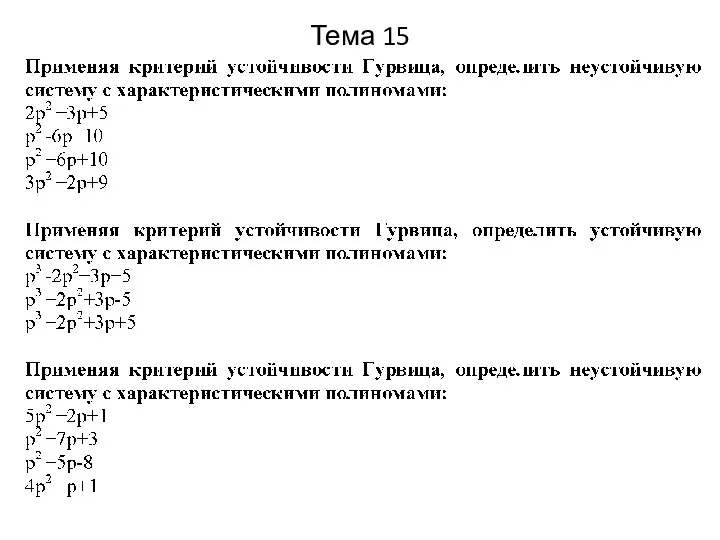
- 49. Тема 15
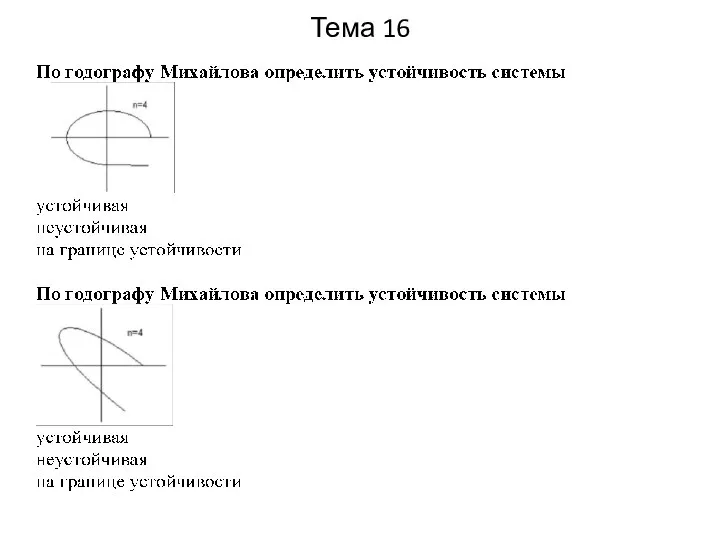
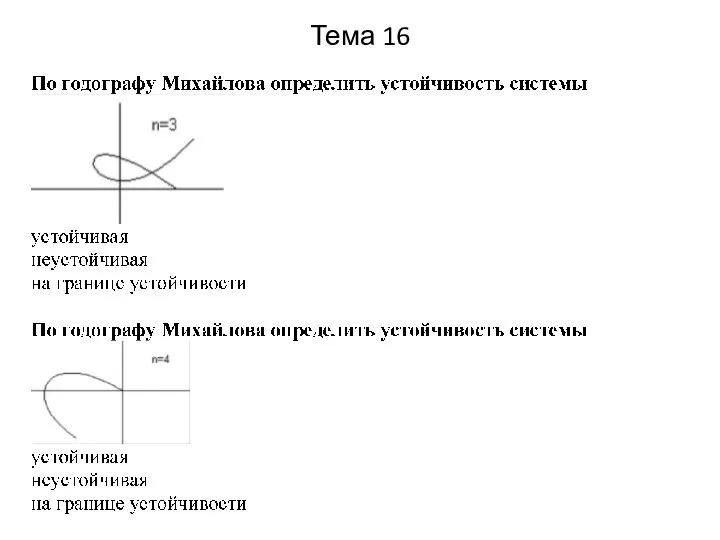
- 50. Тема 16
- 51. Тема 16
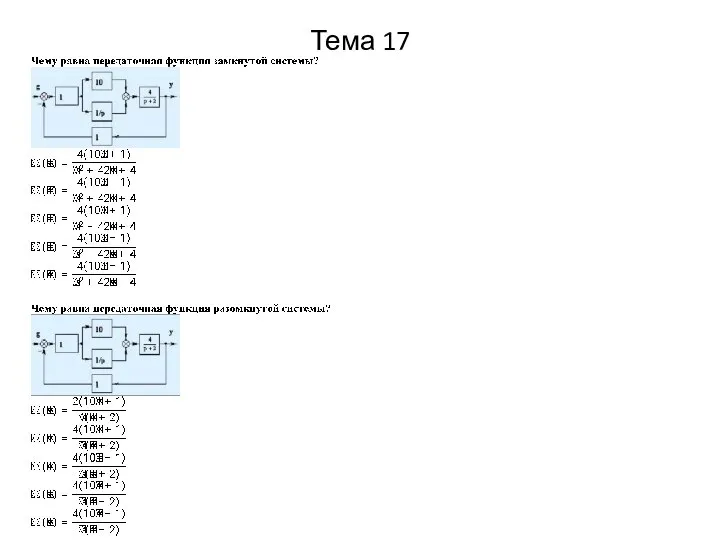
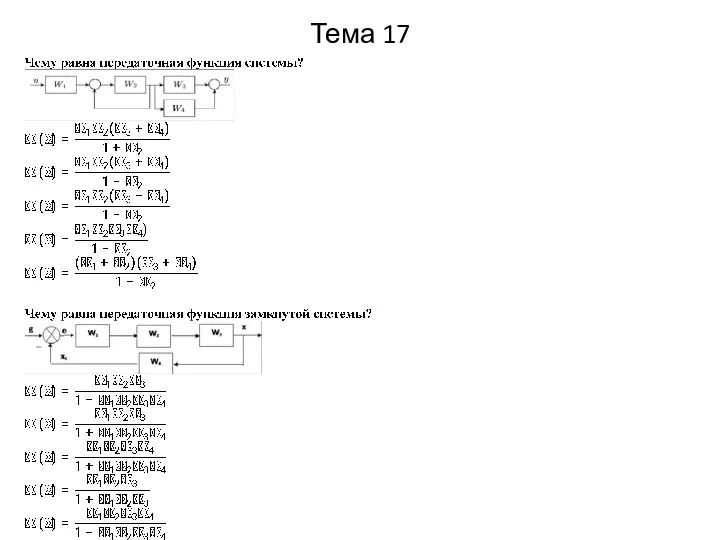
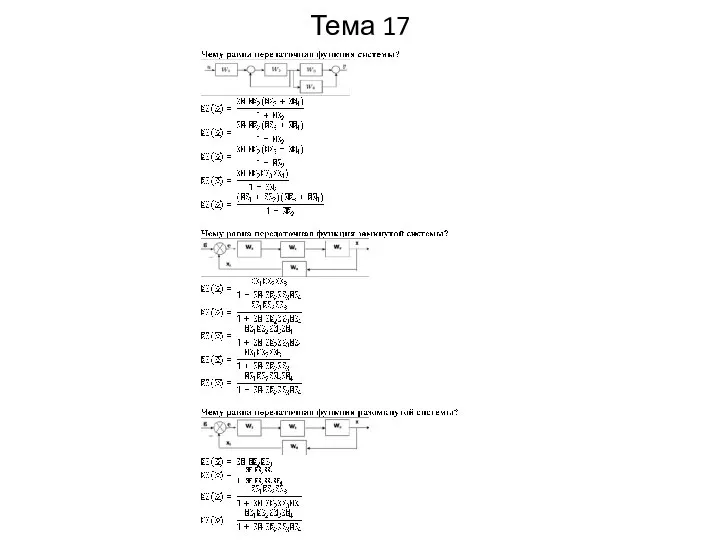
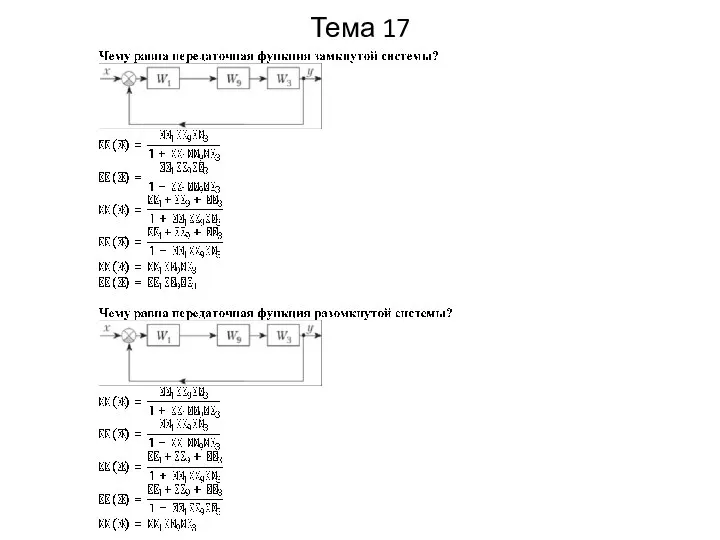
- 52. Тема 17
- 53. Тема 17
- 54. Тема 17
- 55. Тема 17
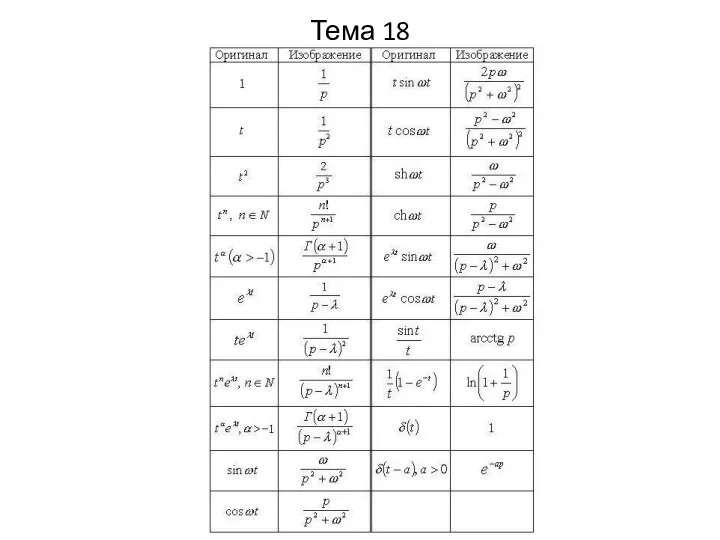
- 56. Тема 18
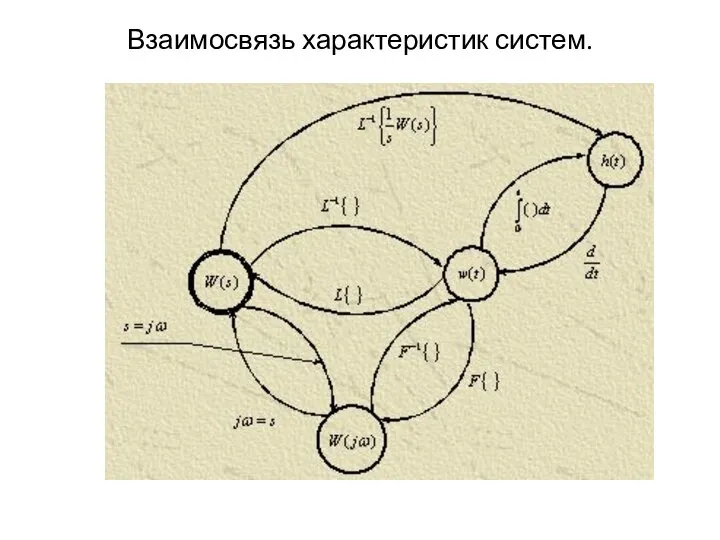
- 57. Взаимосвязь характеристик систем.
- 58. Тема 18
- 59. Тема 18
- 60. Тема 19
- 61. Тема 19
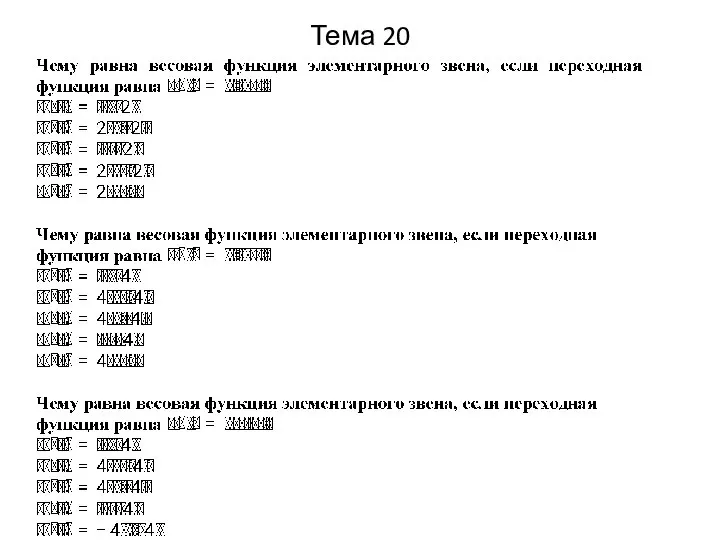
- 62. Тема 20
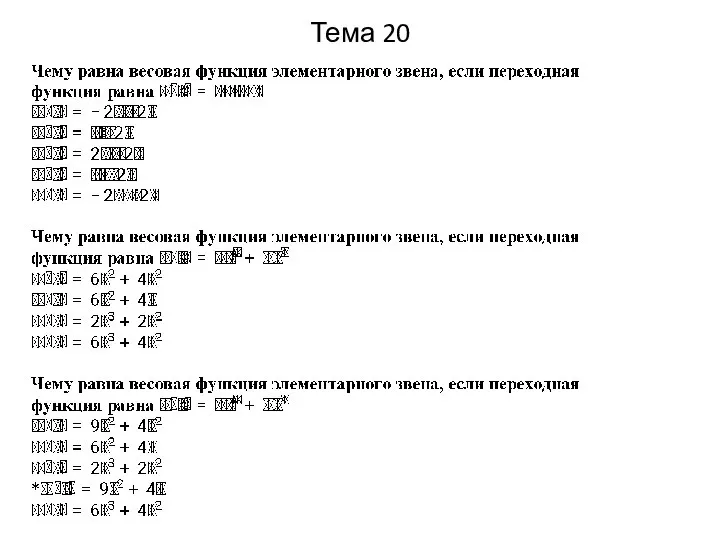
- 63. Тема 20
- 65. Скачать презентацию
Слайд 2Условия обучения
По итогам изучения дисциплины проводится экзамен
В течение семестра необходимо выполнить все
Условия обучения
По итогам изучения дисциплины проводится экзамен
В течение семестра необходимо выполнить все
Слайд 3Список литературы
1. Бесекерский В.Л., Попов Е.П. Теория систем автоматического управления. СПб.: Профессия,
Список литературы
1. Бесекерский В.Л., Попов Е.П. Теория систем автоматического управления. СПб.: Профессия,
Слайд 4Темы дисциплины
Управление и информатика, построение модели простого объекта, общие принципы системной организации,
Темы дисциплины
Управление и информатика, построение модели простого объекта, общие принципы системной организации,
Слайд 5Темы дисциплины
Проблема устойчивости, типовые элементарные звенья, интегрирующее звено, апериодическое звено, колебательное звено,
Темы дисциплины
Проблема устойчивости, типовые элементарные звенья, интегрирующее звено, апериодическое звено, колебательное звено,
Слайд 6(задания к тесту)
(задания к тесту)
Слайд 7Тема 1
Тема 1
Слайд 8Тема 1
Тема 1
Слайд 9Тема 1
Тема 1
Слайд 10Тема 1
Тема 1
Слайд 11Тема 2
Тема 2
Слайд 12Тема 2
При описании объекта управления в непрерывной модели общего вида вектор-функция обозначается
Тема 2
При описании объекта управления в непрерывной модели общего вида вектор-функция обозначается
Слайд 13Тема 2
При описании объекта управления в непрерывной модели общего вида вектор параметров
Тема 2
При описании объекта управления в непрерывной модели общего вида вектор параметров
Слайд 14Тема 3
Тема 3
Слайд 15Тема 3
Тема 3
Слайд 16Тема 3
Главным признаком задачи Коши является задание граничных условий на переменные
в
Тема 3
Главным признаком задачи Коши является задание граничных условий на переменные
в
Слайд 17Тема 3
В решении в форме Коши
свободное движение задано выражением:
В решении
Тема 3
В решении в форме Коши
свободное движение задано выражением:
В решении
Слайд 18Тема 4
Тема 4
Слайд 19Тема 4
Тема 4
Слайд 20Тема 5
Тема 5
Слайд 21Тема 5
Тема 5
Слайд 22Тема 5
Чему равна весовая функция апериодического звена?
Тема 5
Чему равна весовая функция апериодического звена?
Слайд 23Тема 5
Тема 5
Слайд 24Тема 6
Тема 6
Слайд 25Тема 6
Тема 6
Слайд 26Тема 7
Тема 7
Слайд 27Тема 7
Тема 7
Слайд 28Тема 3
Тема 3
Слайд 29Тема 8
Тема 8
Слайд 30Тема 8
Тема 8
Слайд 31Тема 8
Тема 8
Слайд 32Тема 9
Тема 9
Слайд 33Тема 9
Тема 9
Слайд 34Тема 9
Тема 9
Слайд 35Тема 9
Тема 9
Слайд 36Тема 9
Тема 9
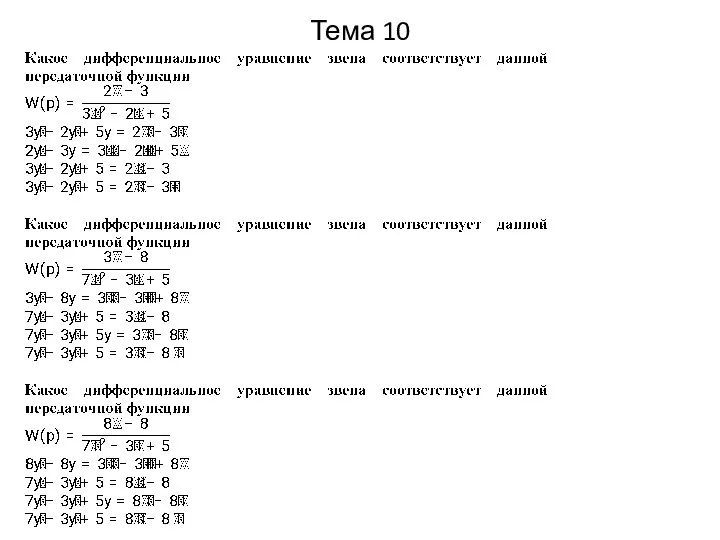
Слайд 37Тема 10
Тема 10
Слайд 38Тема 10
Тема 10
Слайд 39Тема 11
Тема 11
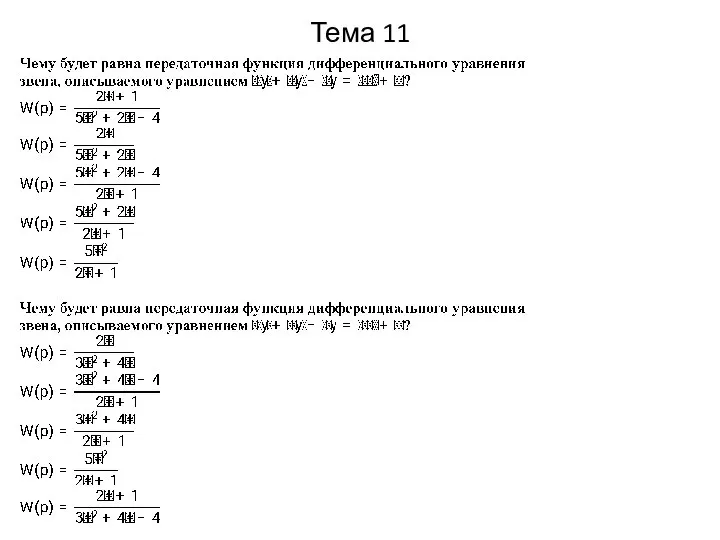
Слайд 40Тема 11
Тема 11
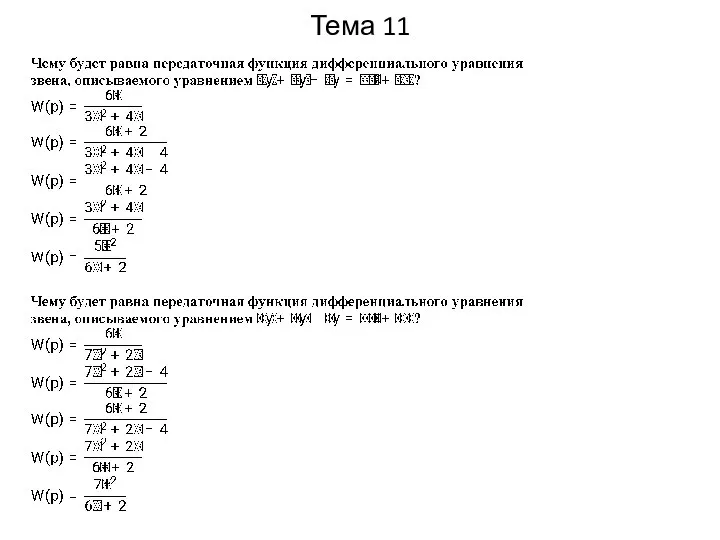
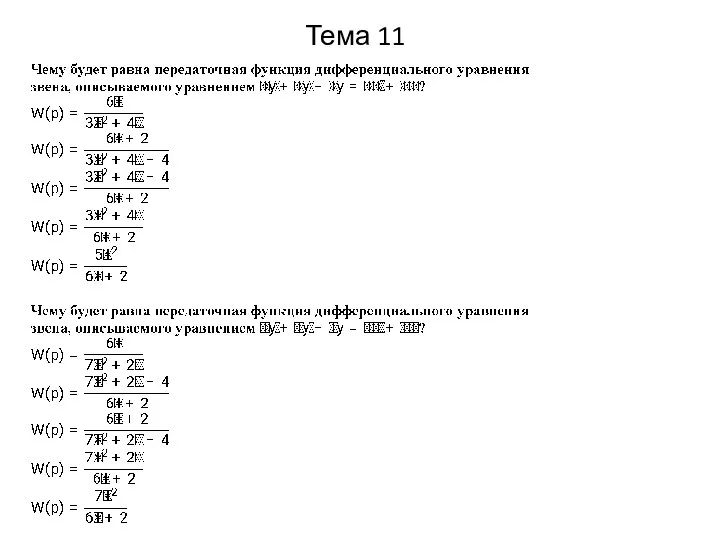
Слайд 41Тема 11
Тема 11
Слайд 42Тема 12
Тема 12
Слайд 43Тема 12
Тема 12
Слайд 44Тема 12
Тема 12
Слайд 45Тема 13
Тема 13
Слайд 46Тема 13
Тема 13
Слайд 47Тема 13
Тема 13
Слайд 48Тема 14
Тема 14
Слайд 49Тема 15
Тема 15
Слайд 50Тема 16
Тема 16
Слайд 51Тема 16
Тема 16
Слайд 52Тема 17
Тема 17
Слайд 53Тема 17
Тема 17
Слайд 54Тема 17
Тема 17
Слайд 55Тема 17
Тема 17
Слайд 56Тема 18
Тема 18
Слайд 57Взаимосвязь характеристик систем.
Взаимосвязь характеристик систем.
Слайд 58Тема 18
Тема 18
Слайд 59Тема 18
Тема 18
Слайд 60Тема 19
Тема 19
Слайд 61Тема 19
Тема 19
Слайд 62Тема 20
Тема 20
Слайд 63Тема 20
Тема 20
 Решение задач по кинематики
Решение задач по кинематики Тормозная система
Тормозная система Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6
Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6 Применение аккумуляторов. 8 класс
Применение аккумуляторов. 8 класс Планета Воды
Планета Воды Применение полярных координат для определения местоположения материальной точки
Применение полярных координат для определения местоположения материальной точки Теоретическая механика
Теоретическая механика Внутренняя энергия макроскопической системы. Тепловое равновесие
Внутренняя энергия макроскопической системы. Тепловое равновесие Мгновенное превращение воды в лед
Мгновенное превращение воды в лед Кристаллы. Образование кристаллов
Кристаллы. Образование кристаллов Магнитное поле
Магнитное поле Оптические датчики тока и напряжения
Оптические датчики тока и напряжения Механическое движение
Механическое движение Валы и опоры. Классификация муфты
Валы и опоры. Классификация муфты Флот начала XX века
Флот начала XX века pril_4
pril_4 Работа и мощность. Решение задач
Работа и мощность. Решение задач Резьбовые соединения
Резьбовые соединения Тепловые явления
Тепловые явления Кинематика
Кинематика Физика и якутский фольклор
Физика и якутский фольклор Тела, вещества, частицы. Твердые, жидкие и газообразные
Тела, вещества, частицы. Твердые, жидкие и газообразные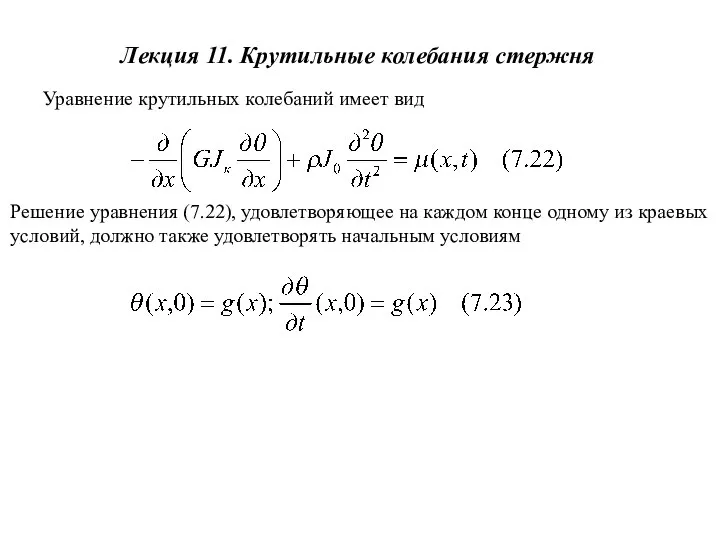 Лекция 11. Крутильные колебания стержня
Лекция 11. Крутильные колебания стержня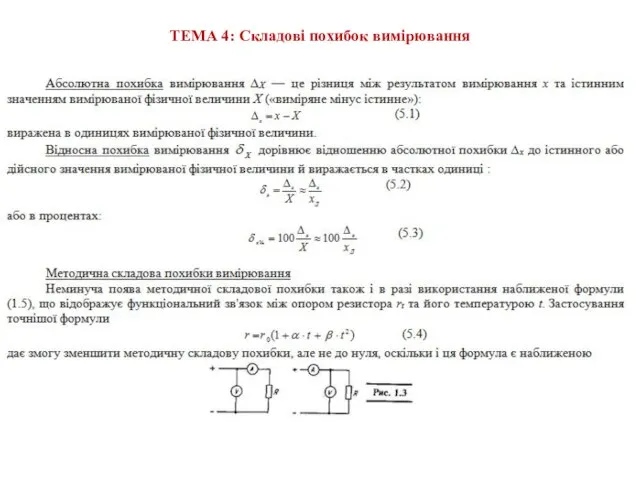 Складові похибок вимірювання. Тема 4
Складові похибок вимірювання. Тема 4 Валоповоротное устройство турбины
Валоповоротное устройство турбины Сила. Маса. Другий та третій закони Ньютона
Сила. Маса. Другий та третій закони Ньютона Баллистика. Повторение. Равномерное движение
Баллистика. Повторение. Равномерное движение Презентация на тему Физика в космосе
Презентация на тему Физика в космосе