- Управление вертолетом. Основные моменты

Содержание
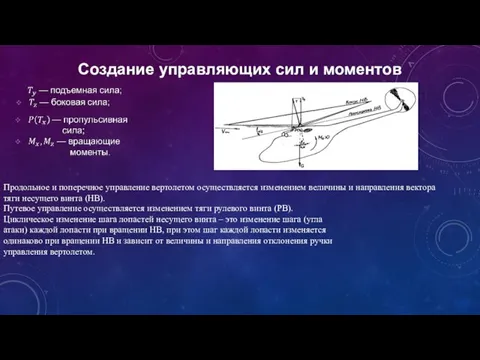
- 2. Создание управляющих сил и моментов Продольное и поперечное управление вертолетом осуществляется изменением величины и направления вектора
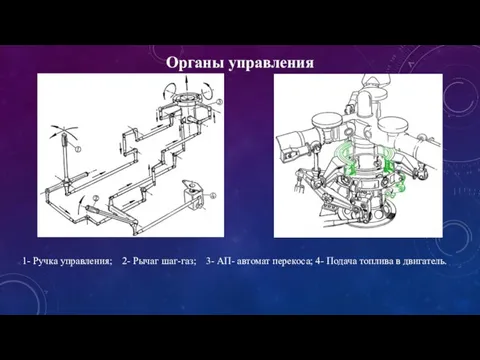
- 3. Органы управления 1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса; 4- Подача топлива в
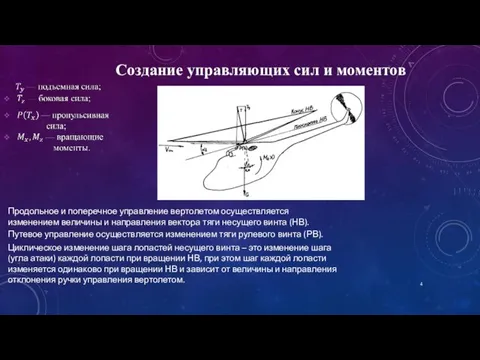
- 4. Создание управляющих сил и моментов Продольное и поперечное управление вертолетом осуществляется изменением величины и направления вектора
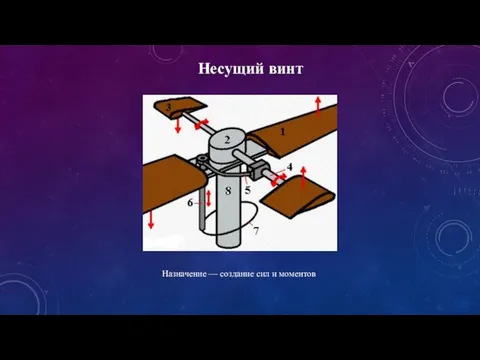
- 5. Несущий винт Назначение — создание сил и моментов
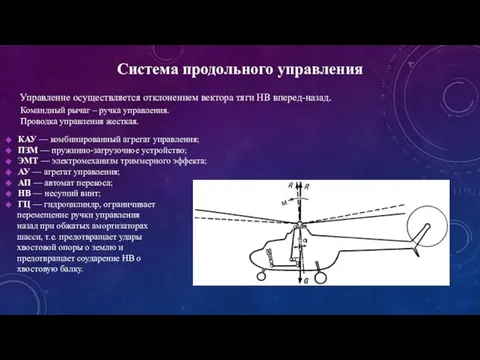
- 6. Система продольного управления Управление осуществляется отклонением вектора тяги НВ вперед-назад. Командный рычаг – ручка управления. Проводка
- 7. Система поперечного управления Обеспечивает управления по крену путем отклонения вектора тяги НВ влево, вправо. При этом
- 8. Система объединенного управления «Шаг-Газ» Обеспечивает вертикальное управление вертолетом путем изменения величины вектора тяги НВ. Командный рычаг
- 9. Система путевого управления Обеспечивает управление величиной тяги рулевого винта. Командный рычаг – педали. Проводка управления до
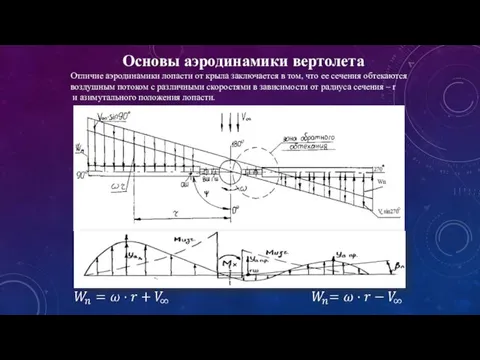
- 10. Основы аэродинамики вертолета Отличие аэродинамики лопасти от крыла заключается в том, что ее сечения обтекаются воздушным
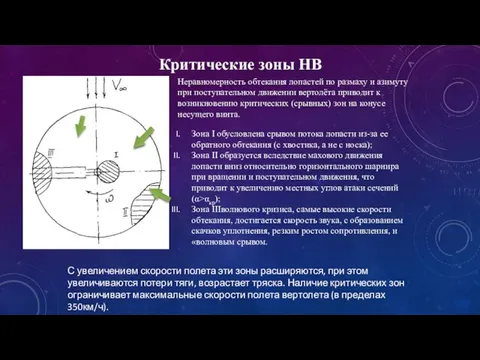
- 11. Критические зоны НВ Зона I обусловлена срывом потока лопасти из-за ее обратного обтекания (с хвостика, а
- 13. Скачать презентацию
Слайд 2Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется изменением
Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется изменением
Слайд 3Органы управления
1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса; 4-
Органы управления
1- Ручка управления; 2- Рычаг шаг-газ; 3- АП- автомат перекоса; 4-
Слайд 4
Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется изменением
Создание управляющих сил и моментов
Продольное и поперечное управление вертолетом осуществляется изменением
Слайд 5Несущий винт
Назначение — создание сил и моментов
Несущий винт
Назначение — создание сил и моментов
Слайд 6Система продольного управления
Управление осуществляется отклонением вектора тяги НВ вперед-назад.
Командный рычаг –
Система продольного управления
Управление осуществляется отклонением вектора тяги НВ вперед-назад.
Командный рычаг –
Слайд 7Система поперечного управления
Обеспечивает управления по крену путем отклонения вектора тяги НВ влево,
Система поперечного управления
Обеспечивает управления по крену путем отклонения вектора тяги НВ влево,

Слайд 8Система объединенного управления «Шаг-Газ»
Обеспечивает вертикальное управление вертолетом путем изменения величины вектора
Система объединенного управления «Шаг-Газ»
Обеспечивает вертикальное управление вертолетом путем изменения величины вектора

Слайд 9Система путевого управления
Обеспечивает управление величиной тяги рулевого винта.
Командный рычаг – педали.
Система путевого управления
Обеспечивает управление величиной тяги рулевого винта.
Командный рычаг – педали.

Слайд 10Основы аэродинамики вертолета
Отличие аэродинамики лопасти от крыла заключается в том, что ее
Основы аэродинамики вертолета
Отличие аэродинамики лопасти от крыла заключается в том, что ее
Слайд 11Критические зоны НВ
Зона I обусловлена срывом потока лопасти из-за ее обратного обтекания
Критические зоны НВ
Зона I обусловлена срывом потока лопасти из-за ее обратного обтекания
 Презентация на тему Теплопроводность
Презентация на тему Теплопроводность  Движение тел. Материальная точка
Движение тел. Материальная точка Презентация на тему: Термодинамика
Презентация на тему: Термодинамика Альтернативные источники энергии
Альтернативные источники энергии Закон Джоуля-Ленца
Закон Джоуля-Ленца Виды излучений. Источники света
Виды излучений. Источники света Техническая механика. Статика. Основные понятия и аксиомы статики
Техническая механика. Статика. Основные понятия и аксиомы статики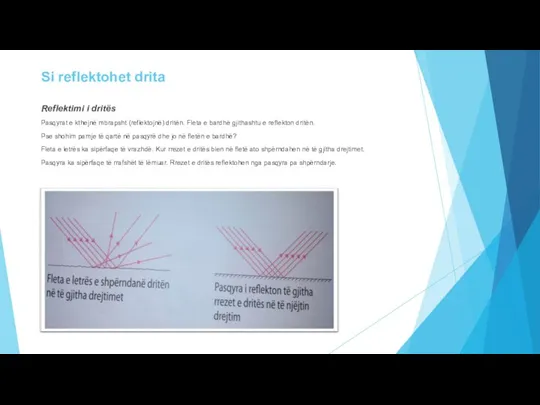 Reflektimi i drites
Reflektimi i drites Механика: кинематика
Механика: кинематика Презентация на тему Электродинамика
Презентация на тему Электродинамика  Решение задач по теме Законы Ньютона. 9 класс
Решение задач по теме Законы Ньютона. 9 класс Энергия связи ядра. Ядерные реакции
Энергия связи ядра. Ядерные реакции Презентация на тему Статика
Презентация на тему Статика  Тепловые двигатели
Тепловые двигатели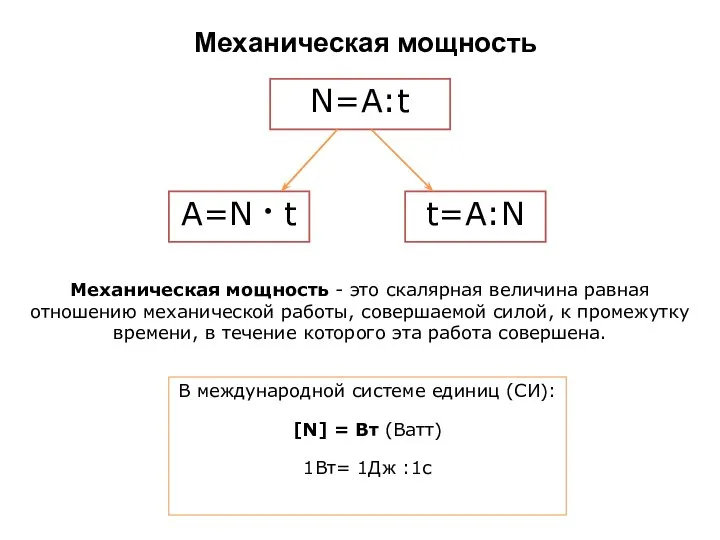 Механическая мощность
Механическая мощность Раскачивание мостов. Процесс синхронизации
Раскачивание мостов. Процесс синхронизации Проект: Кошкина радость
Проект: Кошкина радость Презентация на тему Сила тяжести и вес
Презентация на тему Сила тяжести и вес  КПД нагревателя
КПД нагревателя Презентация на тему Колебания
Презентация на тему Колебания  Гамма- излучение
Гамма- излучение Решение задач. Сила Ампера
Решение задач. Сила Ампера Сила трения
Сила трения Гальваномагнитные свойства тонких пленок висмута, легированных оловом, в интервале температуры 77-300 К
Гальваномагнитные свойства тонких пленок висмута, легированных оловом, в интервале температуры 77-300 К Здравствуй, физика!
Здравствуй, физика! Движение по окружности
Движение по окружности Дисперсия, интерференция, дифракция света
Дисперсия, интерференция, дифракция света Улитка или архимедов винт
Улитка или архимедов винт