- Диагностика по CAN

Содержание
- 2. Команда инициализации диагностики ТА (Target Address) – адрес блока управления, к которому посылается запрос SA (Source
- 3. Обработка больших объемов (содержащих более 8 байт информации) Если передается большой объем информации, первое сообщение (First
- 4. First Frame - Первое сообщение Если первый байт в сообщении 16, второй байт содержит информацию о
- 5. Обработка больших объемов (содержащих более 8 байт информации) После передачи первого сообщения (First Frame), блок управления,
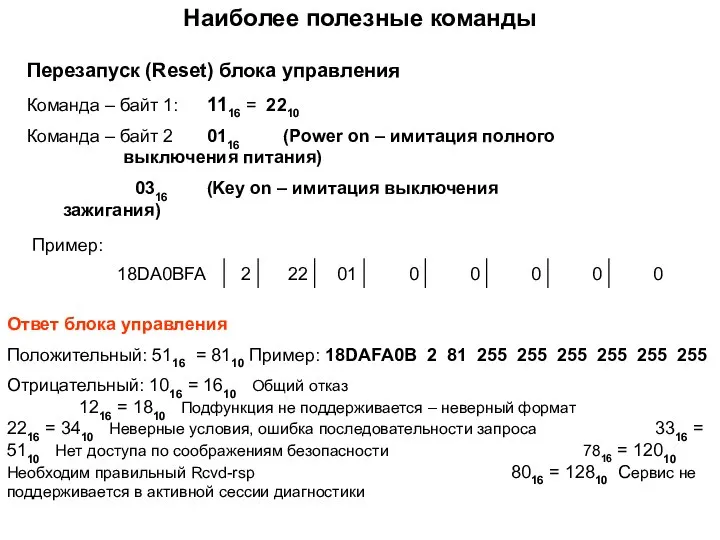
- 6. Наиболее полезные команды Перезапуск (Reset) блока управления Команда – байт 1: 1116 = 2210 Команда –
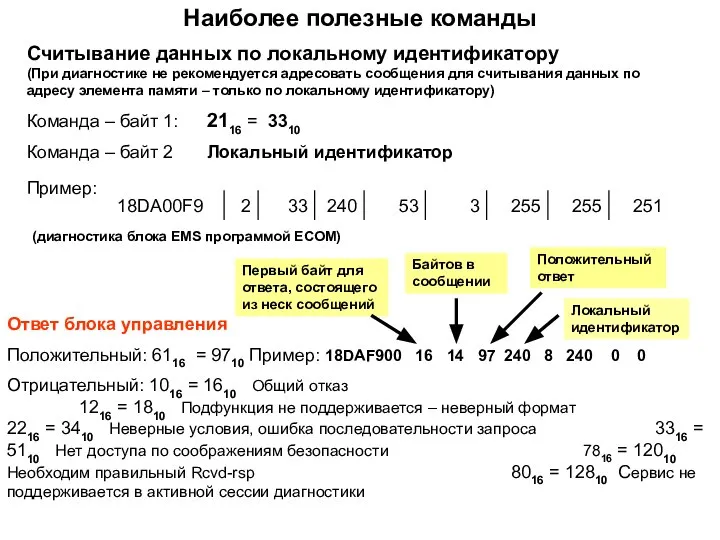
- 7. Наиболее полезные команды Считывание данных по локальному идентификатору (При диагностике не рекомендуется адресовать сообщения для считывания
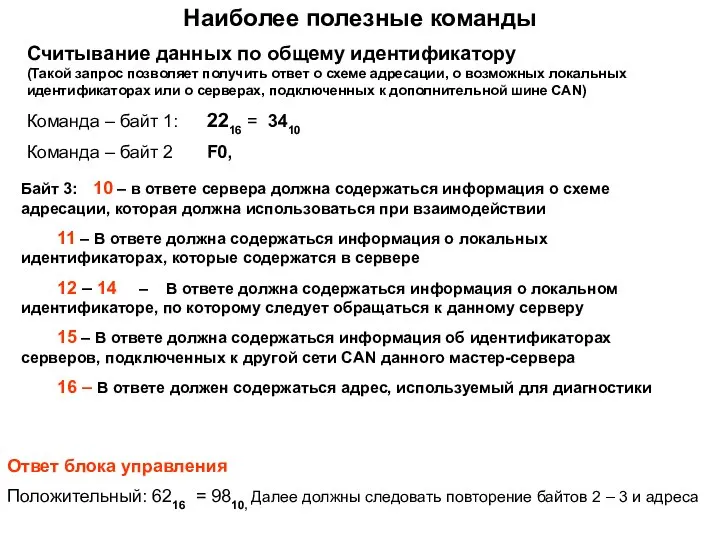
- 8. Наиболее полезные команды Считывание данных по общему идентификатору (Такой запрос позволяет получить ответ о схеме адресации,
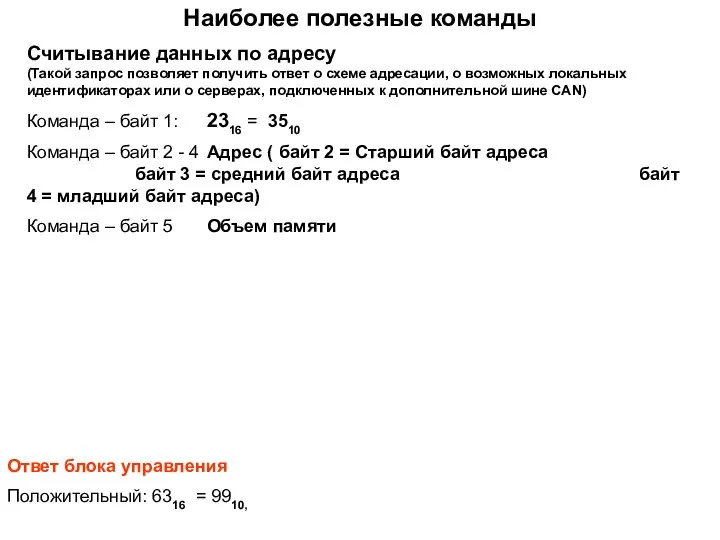
- 9. Наиболее полезные команды Считывание данных по адресу (Такой запрос позволяет получить ответ о схеме адресации, о
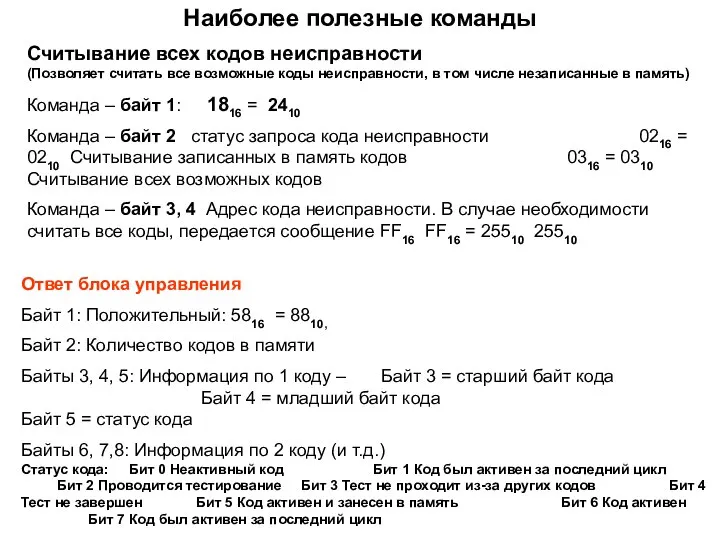
- 10. Наиболее полезные команды Считывание всех кодов неисправности (Позволяет считать все возможные коды неисправности, в том числе
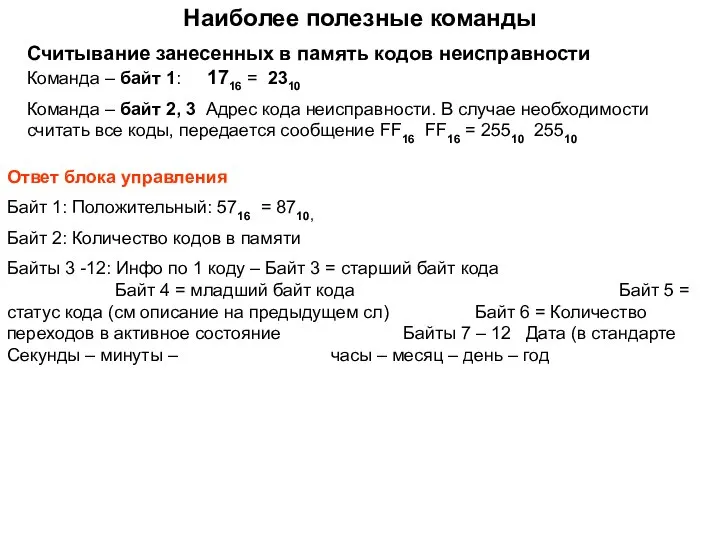
- 11. Наиболее полезные команды Считывание занесенных в память кодов неисправности Команда – байт 1: 1716 = 2310
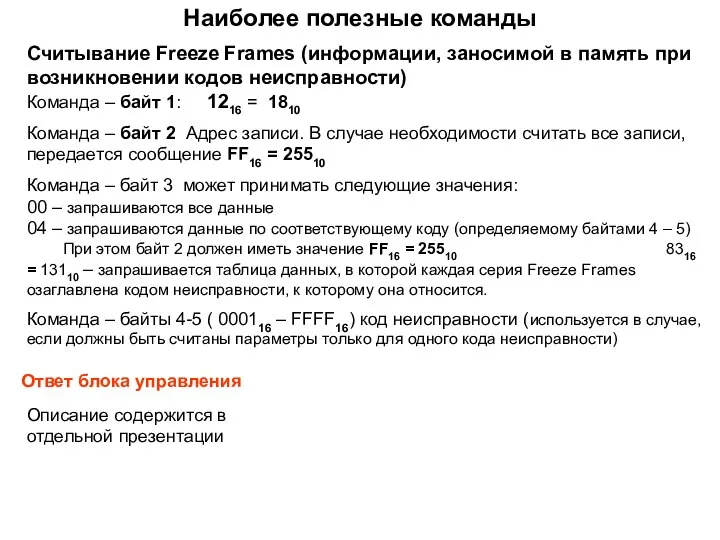
- 12. Наиболее полезные команды Считывание Freeze Frames (информации, заносимой в память при возникновении кодов неисправности) Команда –
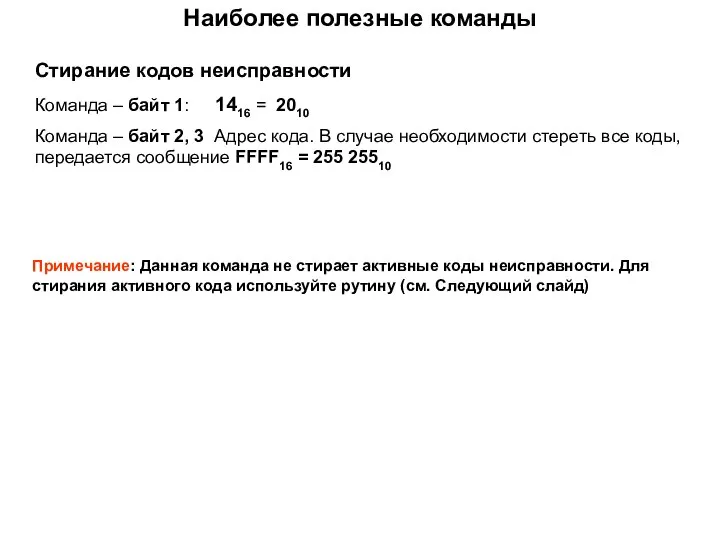
- 13. Наиболее полезные команды Cтирание кодов неисправности Команда – байт 1: 1416 = 2010 Команда – байт
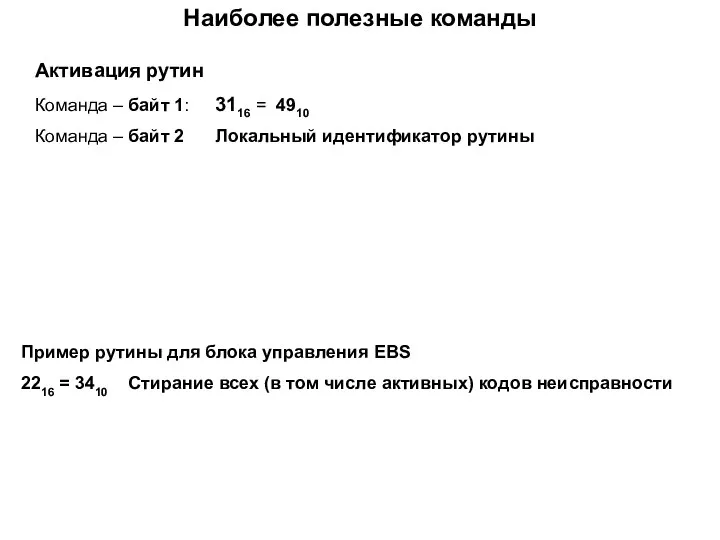
- 14. Наиболее полезные команды Активация рутин Команда – байт 1: 3116 = 4910 Команда – байт 2
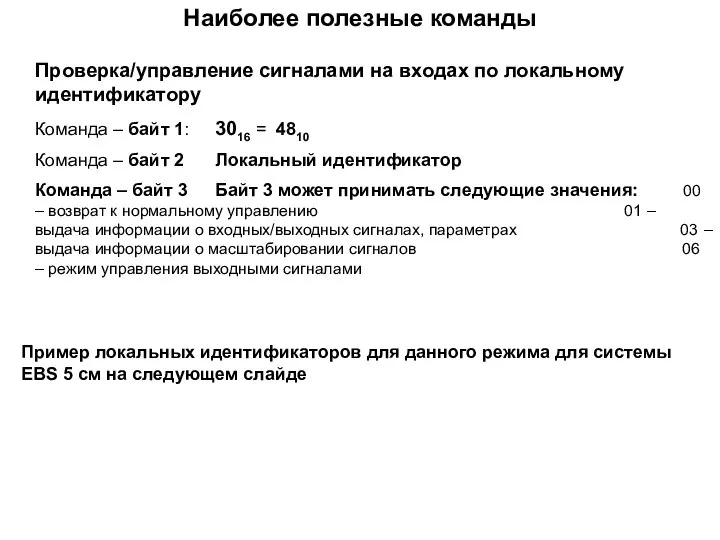
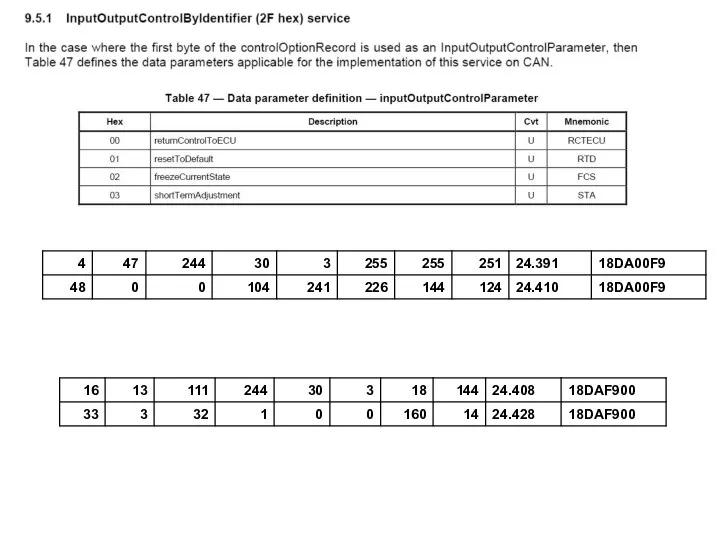
- 15. Наиболее полезные команды Проверка/управление сигналами на входах по локальному идентификатору Команда – байт 1: 3016 =
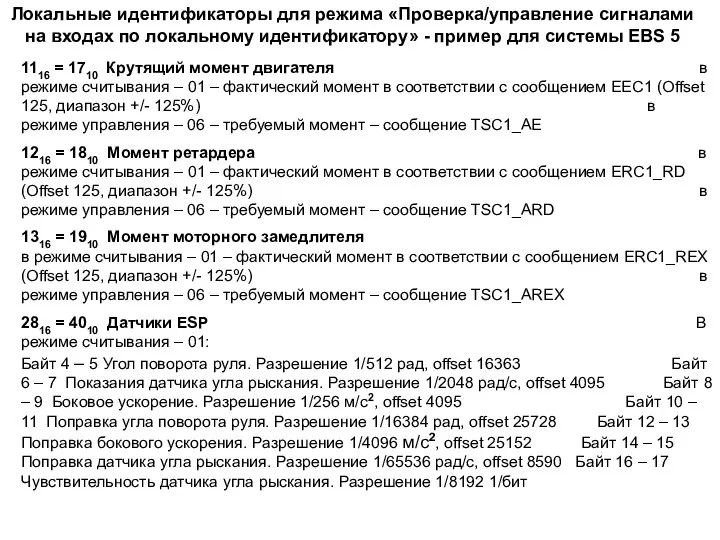
- 16. Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» - пример для системы EBS
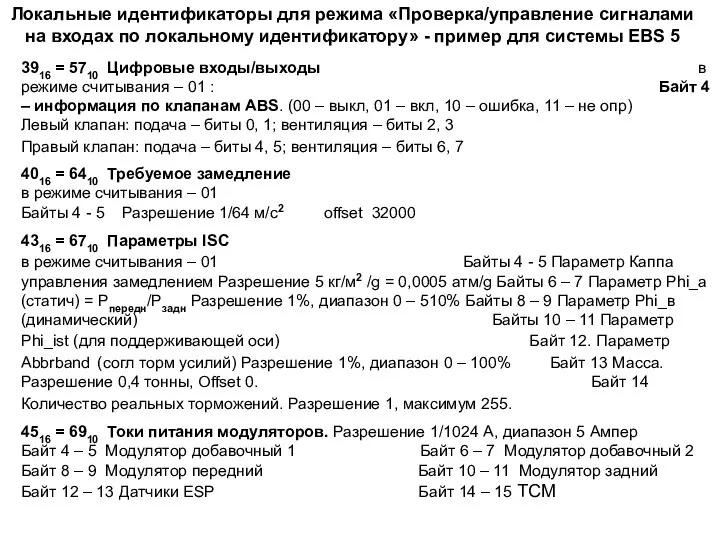
- 17. Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» - пример для системы EBS
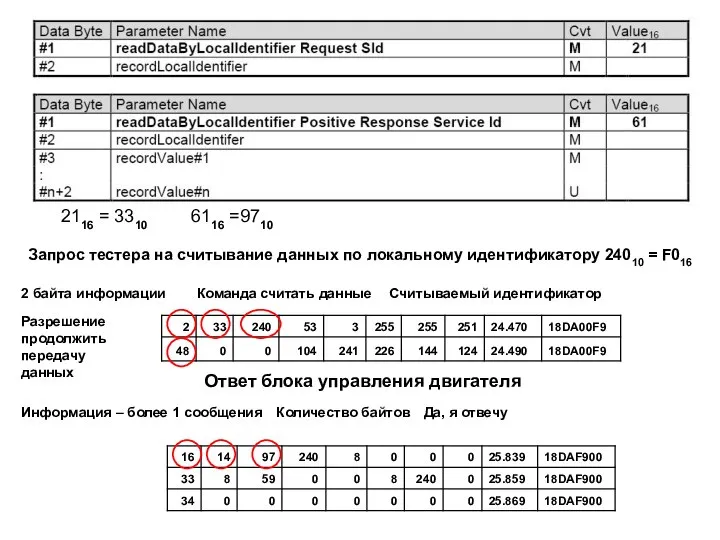
- 18. 2116 = 3310 6116 =9710 Запрос тестера на считывание данных по локальному идентификатору 24010 = F016
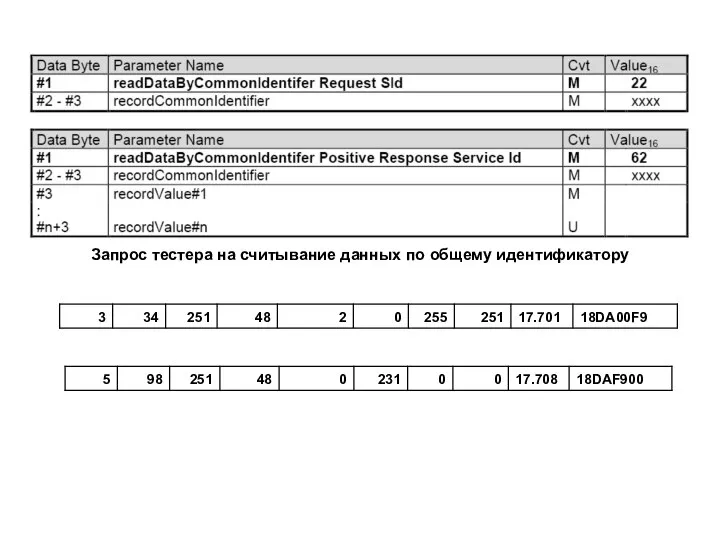
- 19. Запрос тестера на считывание данных по общему идентификатору
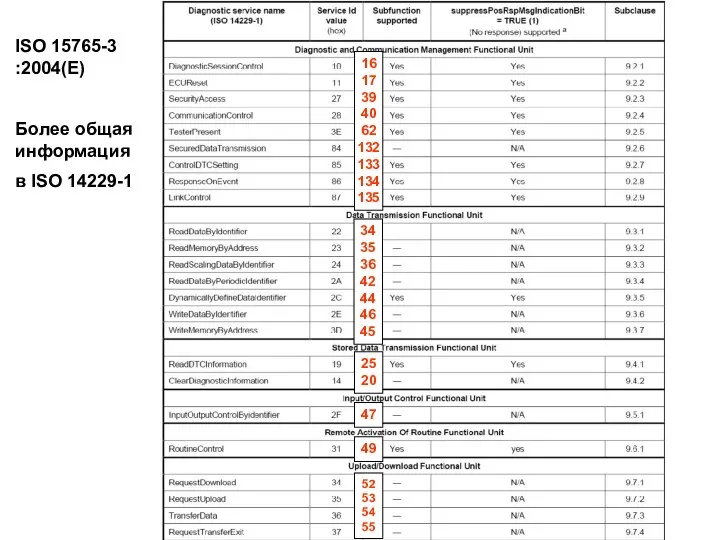
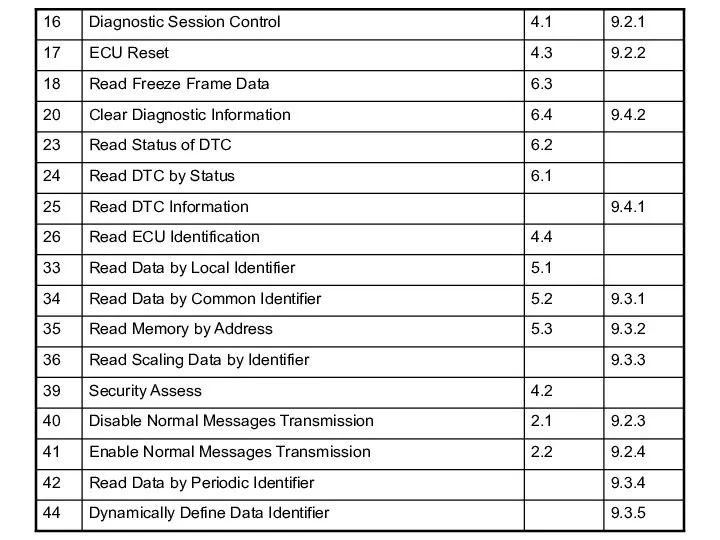
- 21. ISO 15765-3 :2004(E) Более общая информация в ISO 14229-1 16 17 39 40 62 132 133
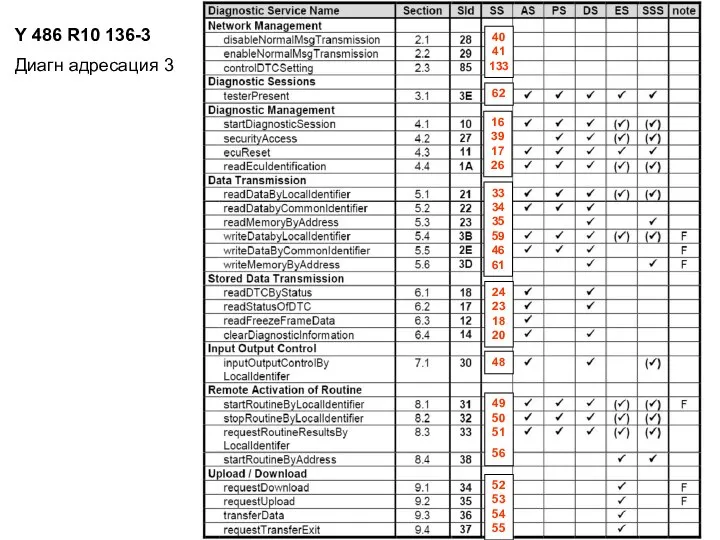
- 22. Y 486 R10 136-3 Диагн адресация 3 40 41 133 62 16 39 17 26 33
- 25. Скачать презентацию
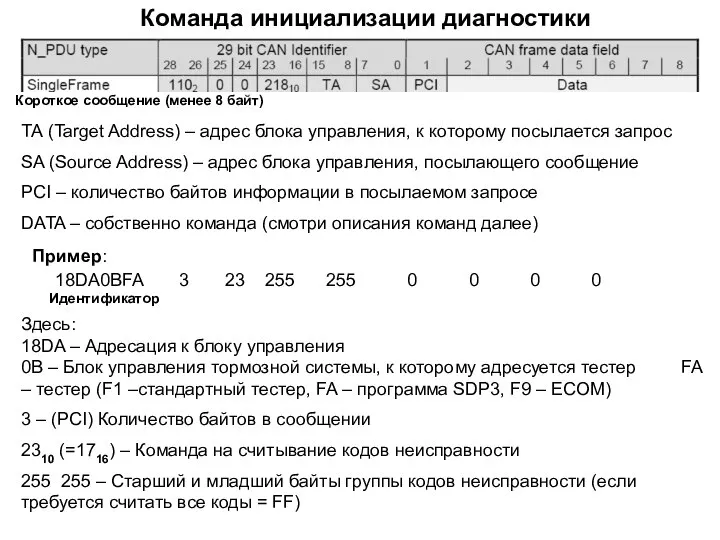
Слайд 2Команда инициализации диагностики
ТА (Target Address) – адрес блока управления, к которому посылается
Команда инициализации диагностики
ТА (Target Address) – адрес блока управления, к которому посылается
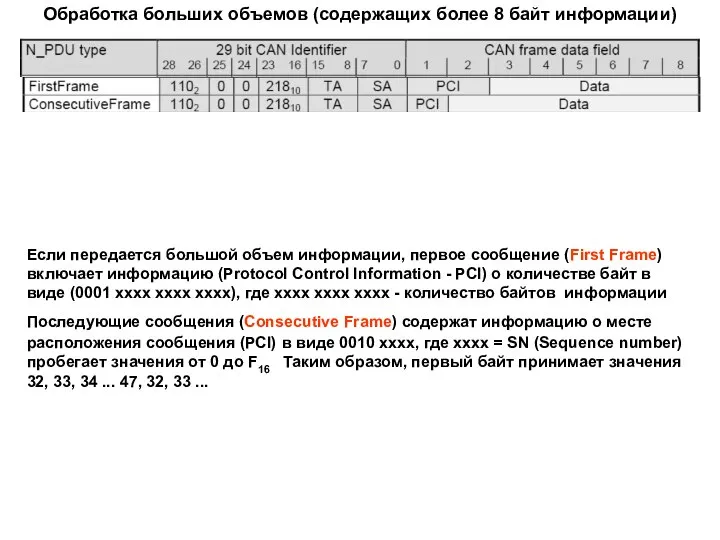
Слайд 3Обработка больших объемов (содержащих более 8 байт информации)
Если передается большой объем информации,
Обработка больших объемов (содержащих более 8 байт информации)
Если передается большой объем информации,
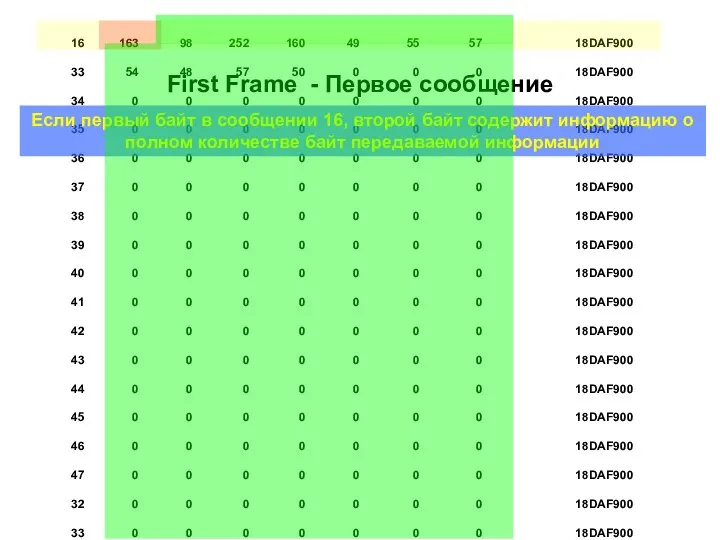
Слайд 4First Frame - Первое сообщение
Если первый байт в сообщении 16, второй байт
First Frame - Первое сообщение
Если первый байт в сообщении 16, второй байт
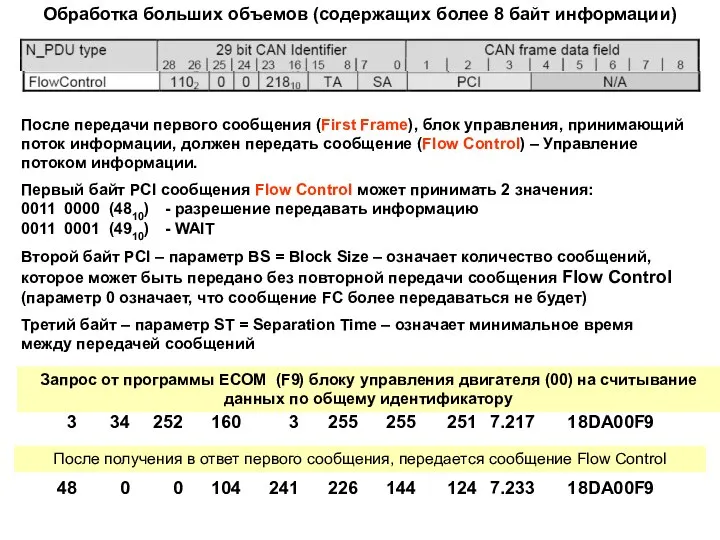
Слайд 5Обработка больших объемов (содержащих более 8 байт информации)
После передачи первого сообщения (First
Обработка больших объемов (содержащих более 8 байт информации)
После передачи первого сообщения (First
Слайд 6Наиболее полезные команды
Перезапуск (Reset) блока управления
Команда – байт 1: 1116 = 2210
Наиболее полезные команды
Перезапуск (Reset) блока управления
Команда – байт 1: 1116 = 2210
Слайд 7Наиболее полезные команды
Считывание данных по локальному идентификатору (При диагностике не рекомендуется адресовать
Наиболее полезные команды
Считывание данных по локальному идентификатору (При диагностике не рекомендуется адресовать
Слайд 8Наиболее полезные команды
Считывание данных по общему идентификатору (Такой запрос позволяет получить ответ
Наиболее полезные команды
Считывание данных по общему идентификатору (Такой запрос позволяет получить ответ
Слайд 9Наиболее полезные команды
Считывание данных по адресу (Такой запрос позволяет получить ответ о
Наиболее полезные команды
Считывание данных по адресу (Такой запрос позволяет получить ответ о
Слайд 10Наиболее полезные команды
Считывание всех кодов неисправности (Позволяет считать все возможные коды неисправности,
Наиболее полезные команды
Считывание всех кодов неисправности (Позволяет считать все возможные коды неисправности,
Слайд 11Наиболее полезные команды
Считывание занесенных в память кодов неисправности Команда – байт 1:
Наиболее полезные команды
Считывание занесенных в память кодов неисправности Команда – байт 1:
Слайд 12Наиболее полезные команды
Считывание Freeze Frames (информации, заносимой в память при возникновении кодов
Наиболее полезные команды
Считывание Freeze Frames (информации, заносимой в память при возникновении кодов
Слайд 13Наиболее полезные команды
Cтирание кодов неисправности
Команда – байт 1: 1416 = 2010
Наиболее полезные команды
Cтирание кодов неисправности
Команда – байт 1: 1416 = 2010
Слайд 14Наиболее полезные команды
Активация рутин
Команда – байт 1: 3116 = 4910
Команда
Наиболее полезные команды
Активация рутин
Команда – байт 1: 3116 = 4910
Команда
Слайд 15Наиболее полезные команды
Проверка/управление сигналами на входах по локальному идентификатору
Команда – байт
Наиболее полезные команды
Проверка/управление сигналами на входах по локальному идентификатору
Команда – байт
Слайд 16Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» -
Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» -
Слайд 17Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» -
Локальные идентификаторы для режима «Проверка/управление сигналами на входах по локальному идентификатору» -
Слайд 182116 = 3310
6116 =9710
Запрос тестера на считывание данных по локальному идентификатору 24010
2116 = 3310
6116 =9710
Запрос тестера на считывание данных по локальному идентификатору 24010
Слайд 19Запрос тестера на считывание данных по общему идентификатору
Запрос тестера на считывание данных по общему идентификатору
Слайд 21ISO 15765-3 :2004(E)
Более общая информация
в ISO 14229-1
16 17 39 40 62 132
ISO 15765-3 :2004(E)
Более общая информация
в ISO 14229-1
16 17 39 40 62 132
Слайд 22Y 486 R10 136-3
Диагн адресация 3
40 41 133
62
16 39 17 26
33 34
Y 486 R10 136-3
Диагн адресация 3
40 41 133
62
16 39 17 26
33 34
 Викторина по информатике
Викторина по информатике Знакомство с компьютером
Знакомство с компьютером Использование онлайн-сервисов в проектной деятельности студентов направления Туризм
Использование онлайн-сервисов в проектной деятельности студентов направления Туризм Разработка комплексной системы защиты объекта информатизации
Разработка комплексной системы защиты объекта информатизации Основы Pascal
Основы Pascal Транспортная задача как частный случай задач линейного программирования
Транспортная задача как частный случай задач линейного программирования Pencil Code. Подфункции и тестирование
Pencil Code. Подфункции и тестирование Создание онлайн-опросов, анкет. Сервис Survio
Создание онлайн-опросов, анкет. Сервис Survio Как можно задать значение переменной? Оператор присваивания
Как можно задать значение переменной? Оператор присваивания Машинное обучение
Машинное обучение Носії інформації
Носії інформації Создание HTML - документов
Создание HTML - документов The functioning of socio-political myths about Russia in modern media
The functioning of socio-political myths about Russia in modern media Абсолютная и относительная адресация
Абсолютная и относительная адресация Информационные ресурсы
Информационные ресурсы Автоматизированные информационные системы
Автоматизированные информационные системы Алфавитный и систематический каталоги в библиотеке
Алфавитный и систематический каталоги в библиотеке Програмирование в сфере офисных приложениях. Тенденции развития программного обеспечения
Програмирование в сфере офисных приложениях. Тенденции развития программного обеспечения Компьютерные сети. Интернет и его ресурсы
Компьютерные сети. Интернет и его ресурсы Коррекция цвета
Коррекция цвета Нужен всем, спору нет, безопасный Интернет
Нужен всем, спору нет, безопасный Интернет Языки программирования
Языки программирования Буквенно-цифровой код (урок 9)
Буквенно-цифровой код (урок 9) Что такое кибербуллинг и как с ним бороться. Памятка для детей и родителей
Что такое кибербуллинг и как с ним бороться. Памятка для детей и родителей Компьютерные модели
Компьютерные модели Структурные типы данных
Структурные типы данных Экологический проект Утриш в Вконтакте
Экологический проект Утриш в Вконтакте Microsoft Entourage
Microsoft Entourage