- Лабиринт. Подпрограммы

Содержание
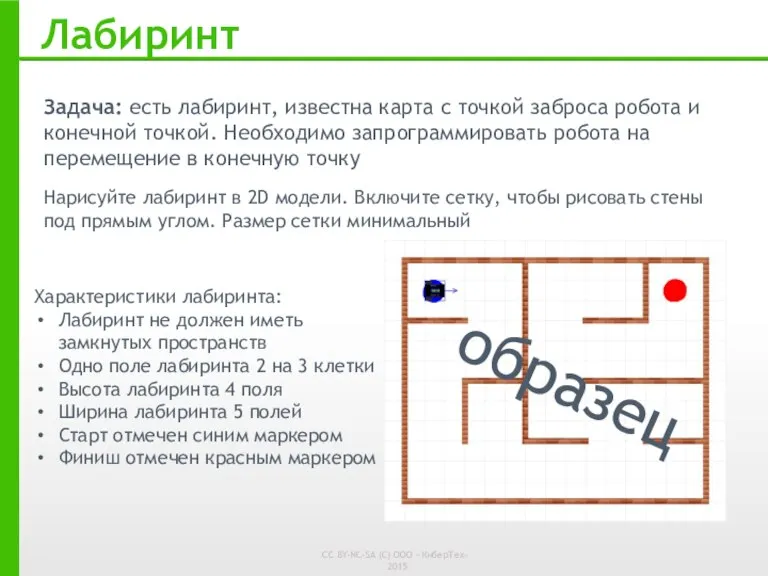
- 2. Лабиринт Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под прямым углом. Размер сетки
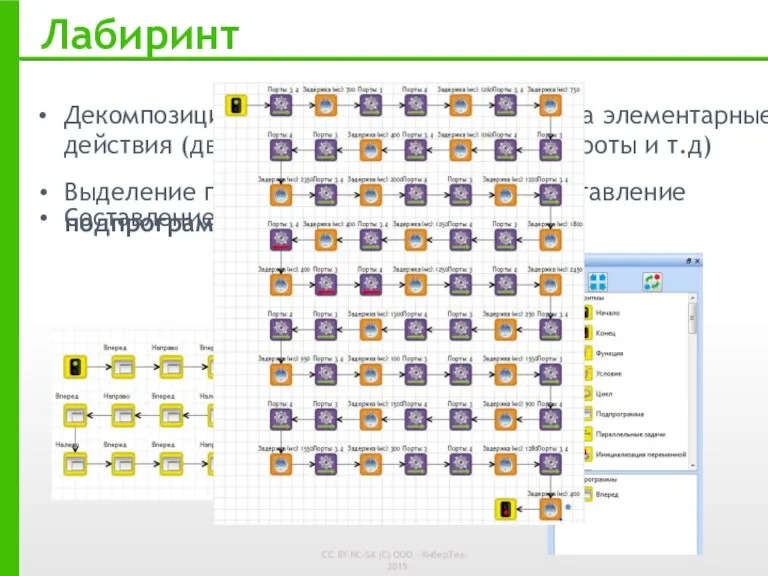
- 3. Лабиринт Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д) Составление программы
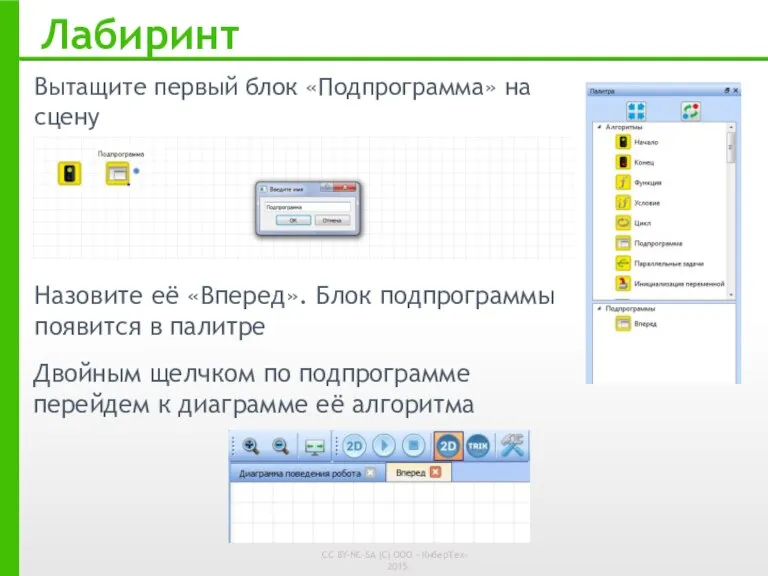
- 4. Лабиринт Вытащите первый блок «Подпрограмма» на сцену Назовите её «Вперед». Блок подпрограммы появится в палитре Двойным
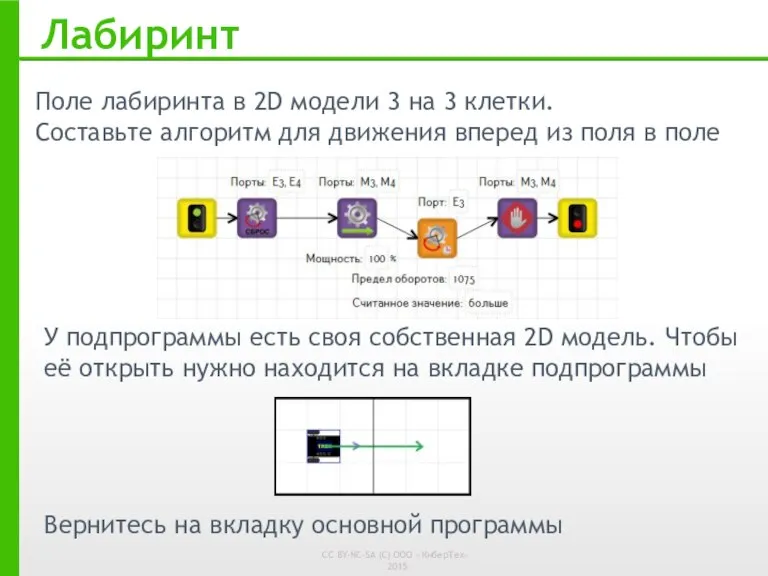
- 5. Лабиринт Поле лабиринта в 2D модели 3 на 3 клетки. Составьте алгоритм для движения вперед из
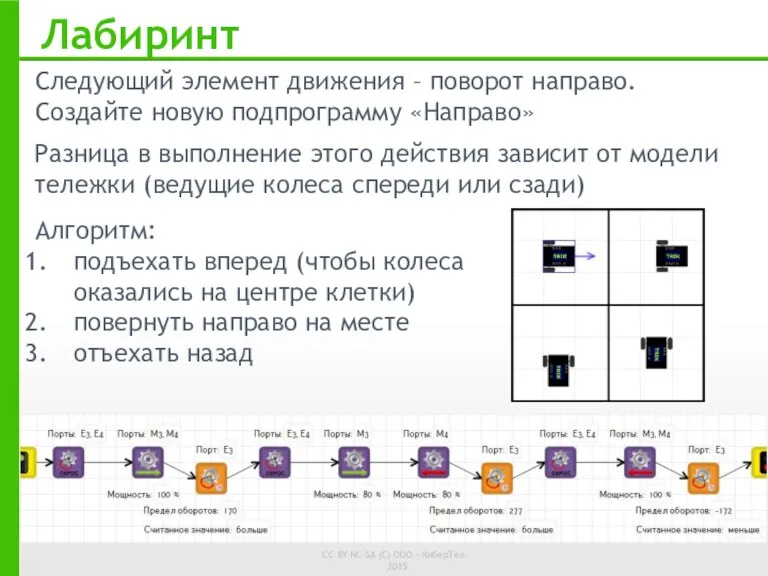
- 6. Лабиринт Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо» Разница в выполнение этого действия
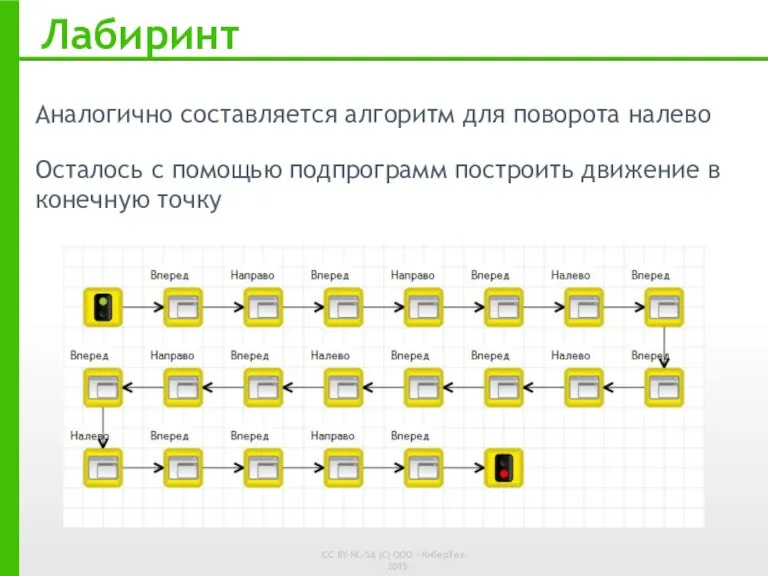
- 7. Лабиринт Аналогично составляется алгоритм для поворота налево Осталось с помощью подпрограмм построить движение в конечную точку
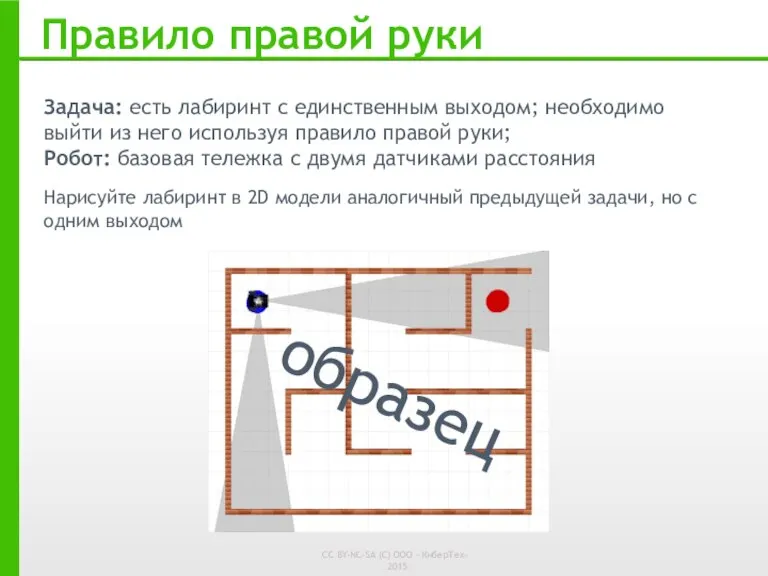
- 8. Правило правой руки Задача: есть лабиринт с единственным выходом; необходимо выйти из него используя правило правой
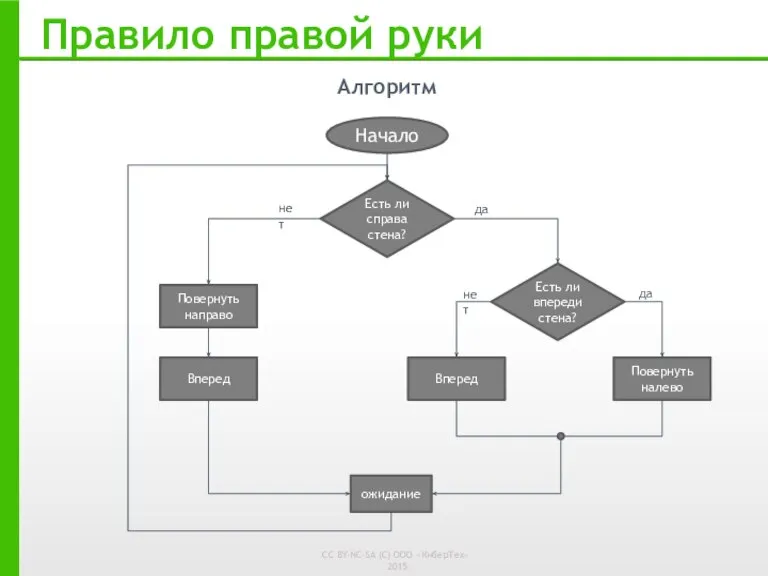
- 9. Правило правой руки Алгоритм Есть ли справа стена? Повернуть направо Вперед Начало Есть ли впереди стена?
- 10. Правило правой руки Алгоритм в ТРИК Студии Потребуется подключить два ИК датчика расстояния Связующим блоком «условия»
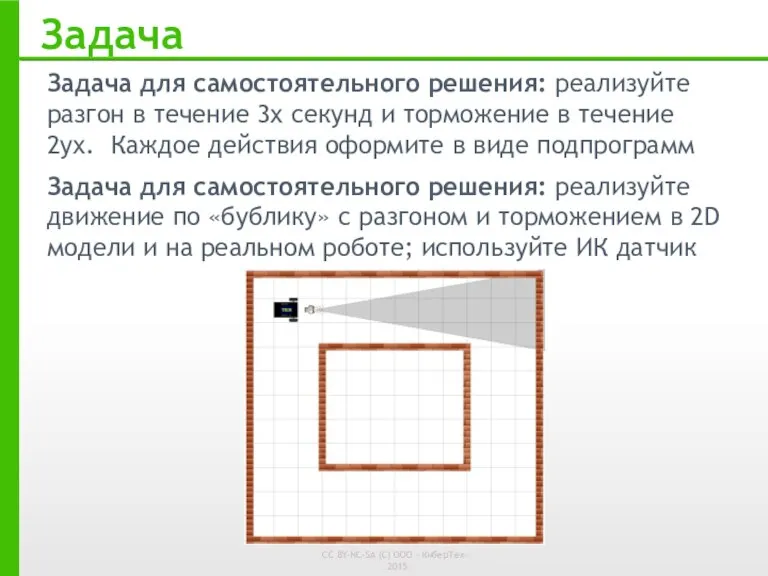
- 11. Задача для самостоятельного решения: реализуйте разгон в течение 3х секунд и торможение в течение 2ух. Каждое
- 13. Скачать презентацию
Слайд 3Лабиринт
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и
Лабиринт
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и
Слайд 4Лабиринт
Вытащите первый блок «Подпрограмма» на сцену
Назовите её «Вперед». Блок подпрограммы появится в
Лабиринт
Вытащите первый блок «Подпрограмма» на сцену
Назовите её «Вперед». Блок подпрограммы появится в
Слайд 5Лабиринт
Поле лабиринта в 2D модели 3 на 3 клетки.
Составьте алгоритм для
Лабиринт
Поле лабиринта в 2D модели 3 на 3 клетки. Составьте алгоритм для
Слайд 6Лабиринт
Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо»
Разница в
Лабиринт
Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо»
Разница в
Слайд 7Лабиринт
Аналогично составляется алгоритм для поворота налево
Осталось с помощью подпрограмм построить движение в
Лабиринт
Аналогично составляется алгоритм для поворота налево
Осталось с помощью подпрограмм построить движение в
Слайд 8Правило правой руки
Задача: есть лабиринт с единственным выходом; необходимо выйти из него
Правило правой руки
Задача: есть лабиринт с единственным выходом; необходимо выйти из него
Слайд 9Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Слайд 10Правило правой руки
Алгоритм в ТРИК Студии
Потребуется подключить два ИК датчика расстояния
Связующим блоком
Правило правой руки
Алгоритм в ТРИК Студии
Потребуется подключить два ИК датчика расстояния
Связующим блоком

Слайд 11Задача для самостоятельного решения: реализуйте разгон в течение 3х секунд и торможение
Задача для самостоятельного решения: реализуйте разгон в течение 3х секунд и торможение
 Технология программированного обучения
Технология программированного обучения Трехмерное моделирование в современном мире
Трехмерное моделирование в современном мире СЁРЧ. Автоматическая система рекомендаций и подбора контента
СЁРЧ. Автоматическая система рекомендаций и подбора контента Параграф 5. Представление целых чисел в компьютере
Параграф 5. Представление целых чисел в компьютере Как решить проблему сетевого подключения imou, вызванную кодом безопасности?
Как решить проблему сетевого подключения imou, вызванную кодом безопасности? Дип-фейк. Перспективы и последствия
Дип-фейк. Перспективы и последствия Информатика. Моё хобби
Информатика. Моё хобби Программная реализация алгоритма Дейсктры
Программная реализация алгоритма Дейсктры Lektsia_3
Lektsia_3 Человек и информация. Информация и знания
Человек и информация. Информация и знания Обучение: Топ-менеждер
Обучение: Топ-менеждер Кибербезопасность и хакинг
Кибербезопасность и хакинг Моя идея для школы будущего. Школа - интернат для одаренных детей Intel.Corp
Моя идея для школы будущего. Школа - интернат для одаренных детей Intel.Corp Установка сносок
Установка сносок Элементы современной электронной презентации на примере проекта Моя группа
Элементы современной электронной презентации на примере проекта Моя группа Программирование (Python)
Программирование (Python) Информационная безопасность. Защита баз данных
Информационная безопасность. Защита баз данных Relative Strength Index
Relative Strength Index Информационные технологии в управлении
Информационные технологии в управлении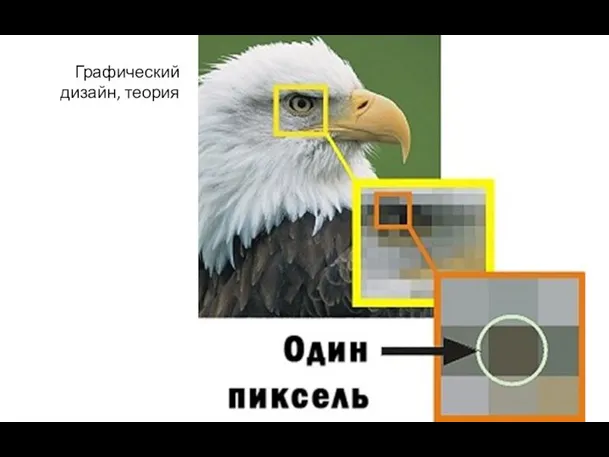 2.3 Введение, пиксели
2.3 Введение, пиксели Выполнила: ученица 10класса МОУ СОШ №14 Чекундинского сельского поселения. Журавлева Лариса.
Выполнила: ученица 10класса МОУ СОШ №14 Чекундинского сельского поселения. Журавлева Лариса.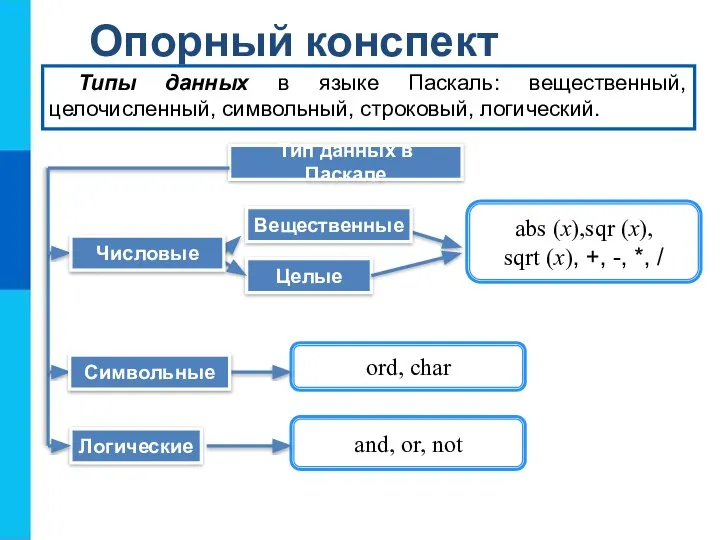 Типы данных в языке Паскаль: вещественный, целочисленный, символьный, строковый, логический
Типы данных в языке Паскаль: вещественный, целочисленный, символьный, строковый, логический Семинар-тренинг 5-8 октября 2014 года. Реестр документов. Документы Интеркампани
Семинар-тренинг 5-8 октября 2014 года. Реестр документов. Документы Интеркампани Презентация на тему Табличные информационные модели
Презентация на тему Табличные информационные модели  Путешествие в типографию
Путешествие в типографию База данных
База данных Содержательный подход измерению количества информации
Содержательный подход измерению количества информации Этапы развития технических средств и информационных ресурсов
Этапы развития технических средств и информационных ресурсов