- Matlab Simulink. Окно обозревателя разделов библиотеки

Содержание
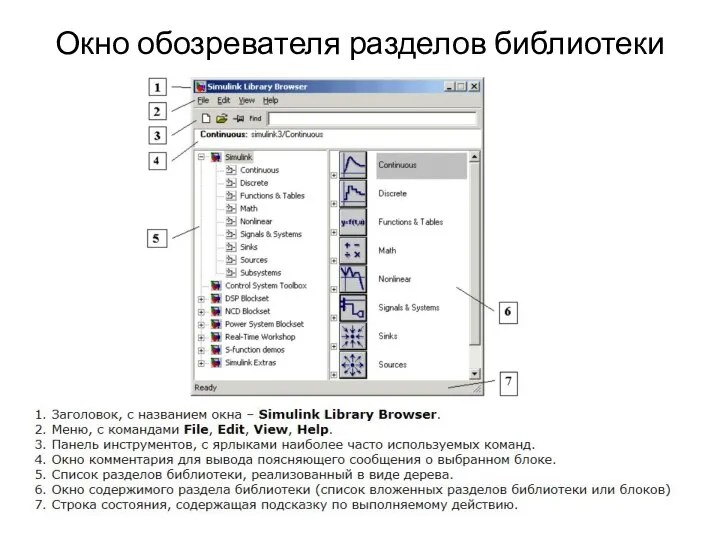
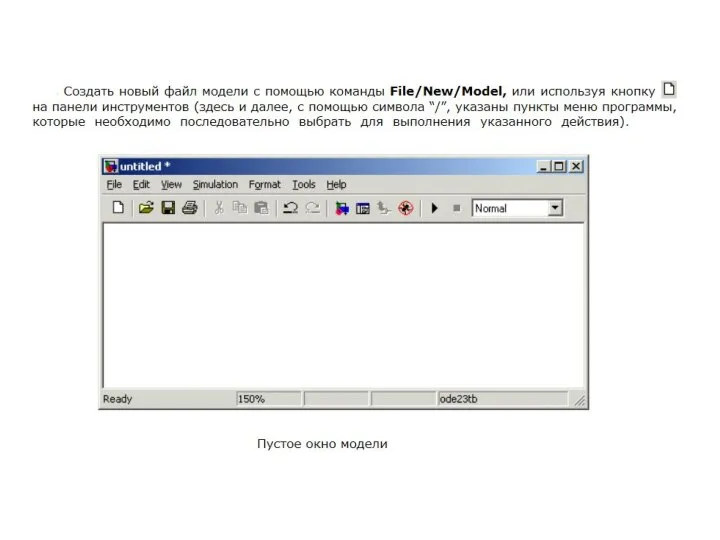
- 2. Окно обозревателя разделов библиотеки
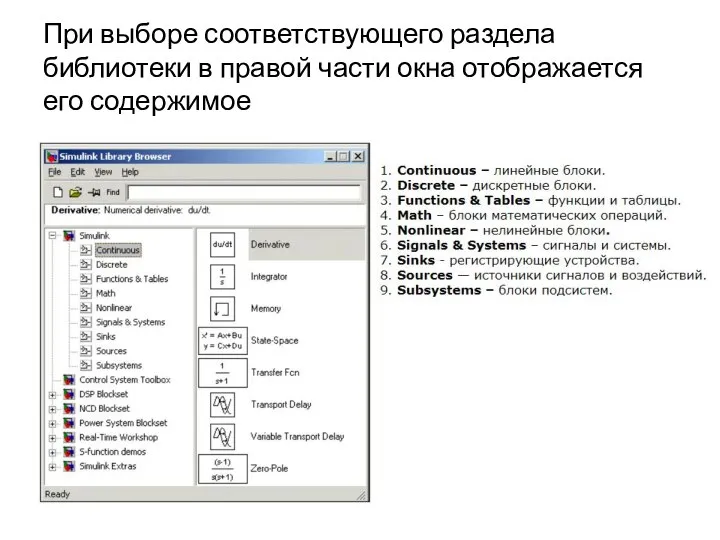
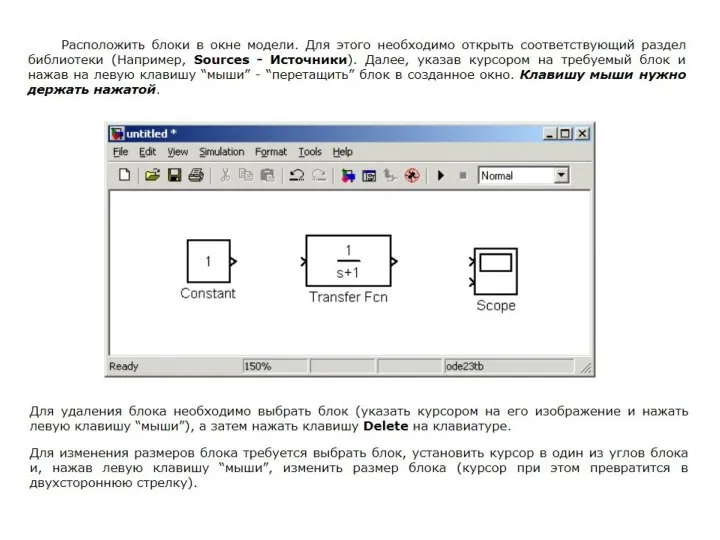
- 3. При выборе соответствующего раздела библиотеки в правой части окна отображается его содержимое
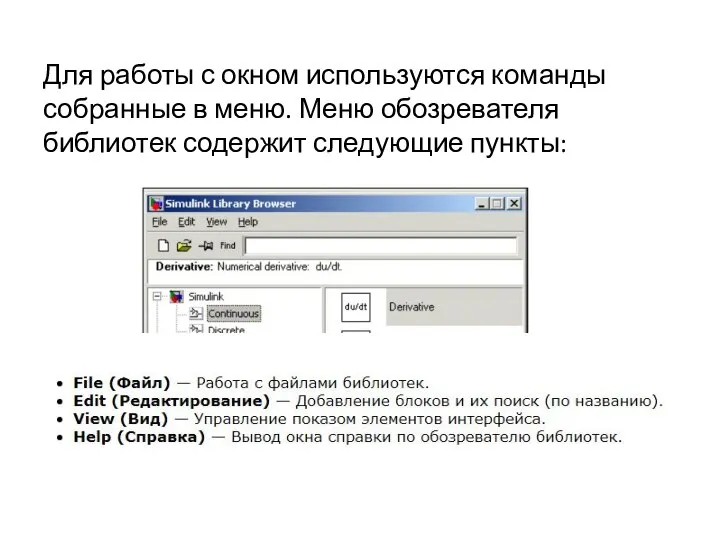
- 4. Для работы с окном используются команды собранные в меню. Меню обозревателя библиотек содержит следующие пункты:
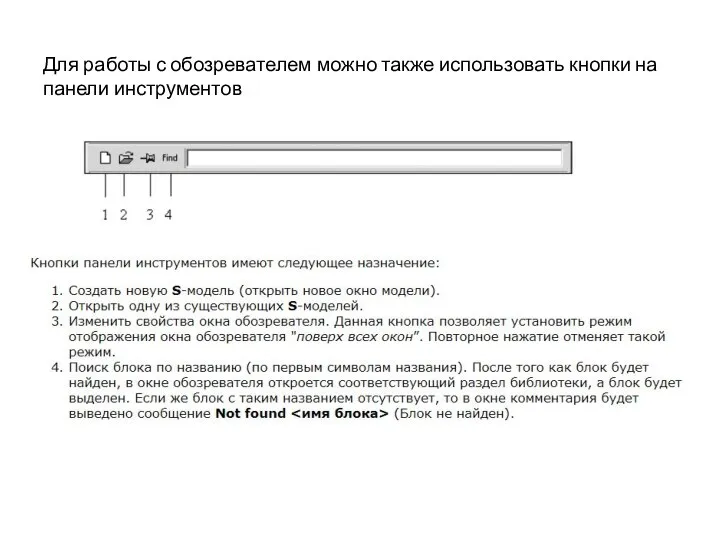
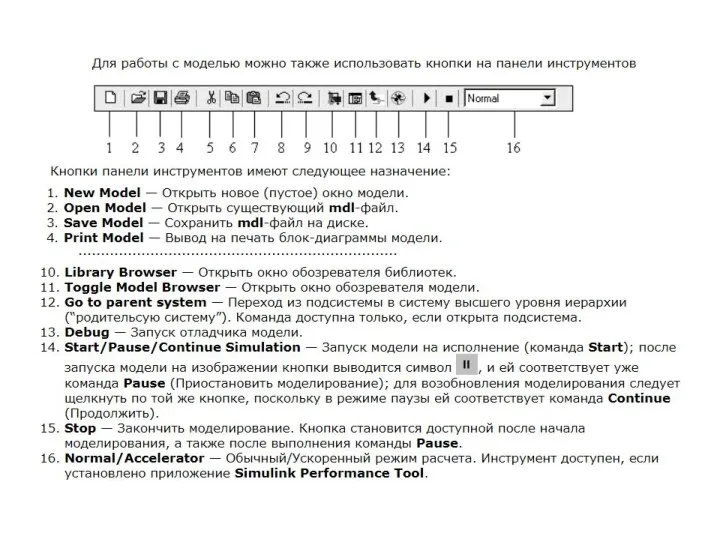
- 5. Для работы с обозревателем можно также использовать кнопки на панели инструментов
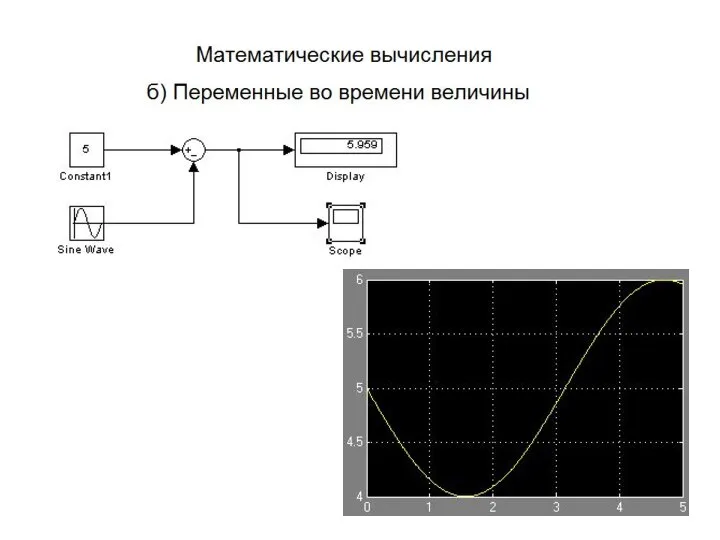
- 15. Примеры Пример 1. Моделирование входных сигналов динамических систем Постановка задачи. Построить модель сигнала вида на интервале
- 16. Сигнал задан в параметрах блока Sine Wave (библиотека Sources). Для сигнала используются два блока – блок
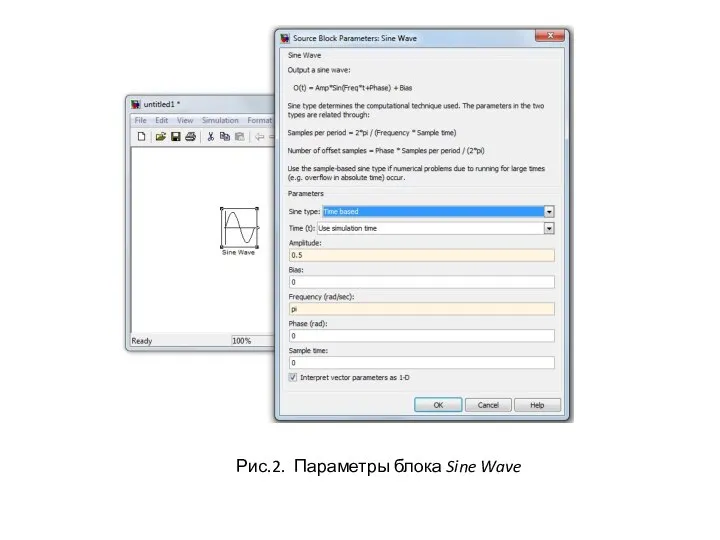
- 17. Рис.2. Параметры блока Sine Wave
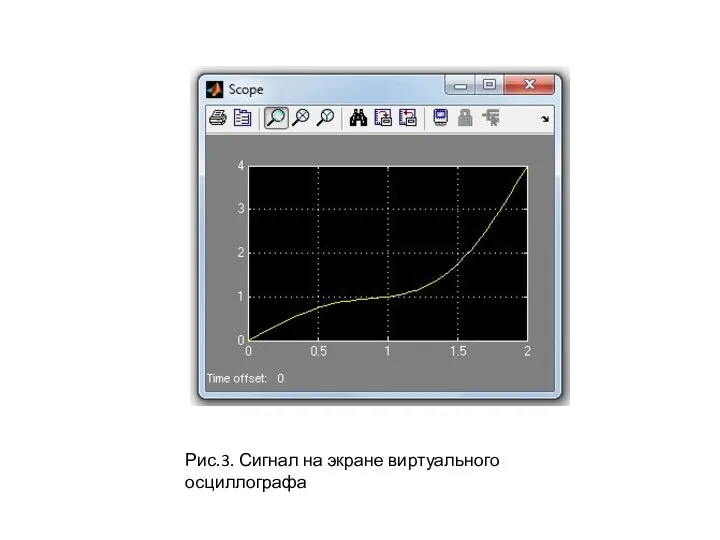
- 18. Рис.3. Сигнал на экране виртуального осциллографа
- 19. Пример 2. Моделирование временного отклика динамических систем Постановка задачи Определить временные характеристики звена (переходную и весовую
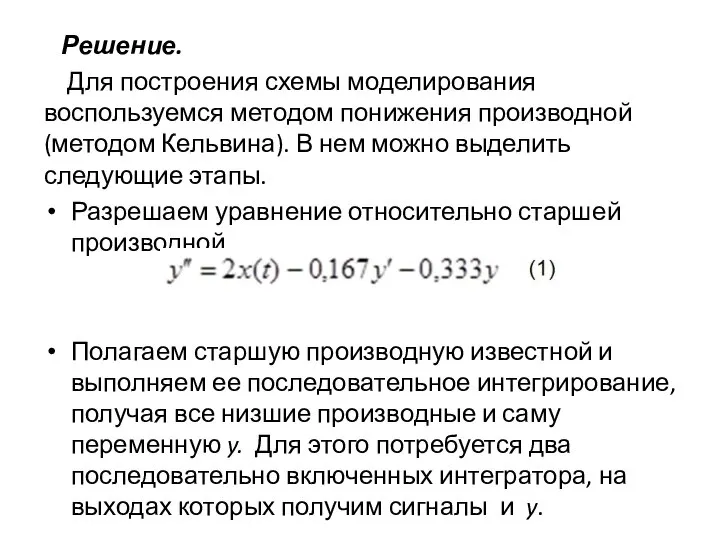
- 20. Решение. Для построения схемы моделирования воспользуемся методом понижения производной (методом Кельвина). В нем можно выделить следующие
- 21. Формируем старшую производную, используя уравнение (1). Для этого потребуется сумматор, складывающий сигналы и y, умноженные, соответственно,
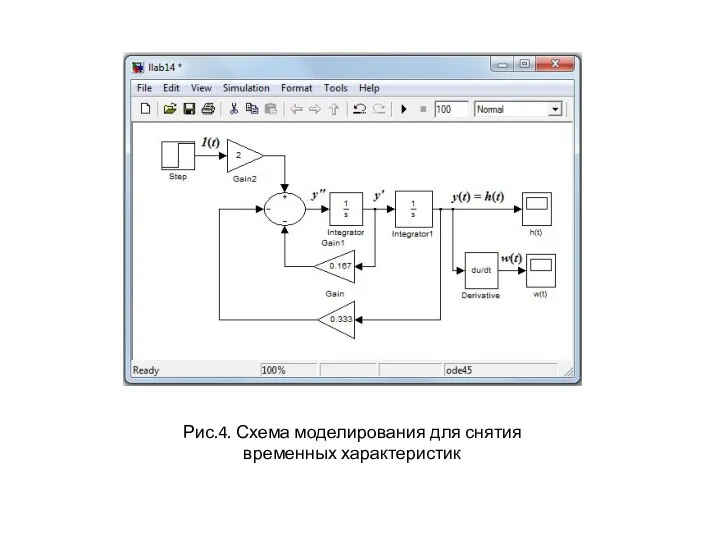
- 22. Рис.4. Схема моделирования для снятия временных характеристик
- 23. Для сбора модели используются следующие блоки библиотеки Simulink: ступенчатая функция – библиотека Sources → Step; линейные
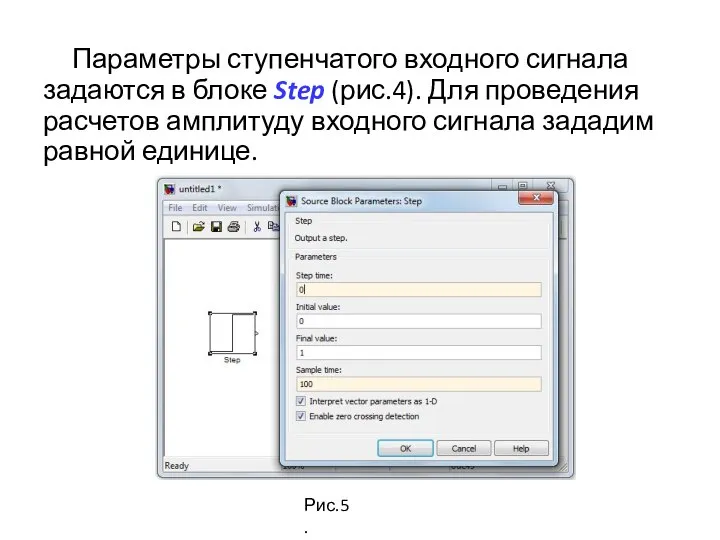
- 24. Параметры ступенчатого входного сигнала задаются в блоке Step (рис.4). Для проведения расчетов амплитуду входного сигнала зададим
- 26. Скачать презентацию
Слайд 3При выборе соответствующего раздела библиотеки в правой части окна отображается его содержимое
При выборе соответствующего раздела библиотеки в правой части окна отображается его содержимое
Слайд 4Для работы с окном используются команды собранные в меню. Меню обозревателя библиотек
Для работы с окном используются команды собранные в меню. Меню обозревателя библиотек
Слайд 5Для работы с обозревателем можно также использовать кнопки на панели инструментов
Для работы с обозревателем можно также использовать кнопки на панели инструментов





Слайд 15Примеры
Пример 1. Моделирование входных сигналов динамических систем
Постановка задачи.
Построить модель сигнала
Примеры
Пример 1. Моделирование входных сигналов динамических систем
Постановка задачи.
Построить модель сигнала
Слайд 16 Сигнал задан в параметрах блока Sine Wave (библиотека Sources).
Для
Сигнал задан в параметрах блока Sine Wave (библиотека Sources).
Для
Слайд 17Рис.2. Параметры блока Sine Wave
Рис.2. Параметры блока Sine Wave
Слайд 18Рис.3. Сигнал на экране виртуального осциллографа
Рис.3. Сигнал на экране виртуального осциллографа
Слайд 19Пример 2. Моделирование временного отклика динамических систем
Постановка задачи
Определить временные характеристики
Пример 2. Моделирование временного отклика динамических систем
Постановка задачи
Определить временные характеристики
Слайд 20 Решение.
Для построения схемы моделирования воспользуемся методом понижения производной (методом Кельвина).
Решение.
Для построения схемы моделирования воспользуемся методом понижения производной (методом Кельвина).
Слайд 21Формируем старшую производную, используя уравнение (1). Для этого потребуется сумматор, складывающий сигналы
Формируем старшую производную, используя уравнение (1). Для этого потребуется сумматор, складывающий сигналы
Слайд 22Рис.4. Схема моделирования для снятия временных характеристик
Рис.4. Схема моделирования для снятия временных характеристик
Слайд 23 Для сбора модели используются следующие блоки библиотеки Simulink:
ступенчатая функция – библиотека Sources
Для сбора модели используются следующие блоки библиотеки Simulink:
ступенчатая функция – библиотека Sources
Слайд 24 Параметры ступенчатого входного сигнала задаются в блоке Step (рис.4). Для проведения
Параметры ступенчатого входного сигнала задаются в блоке Step (рис.4). Для проведения
 Электронные библиотечные системы
Электронные библиотечные системы Какая бывает информация
Какая бывает информация Арбитраж трафика
Арбитраж трафика Обработка графической информации
Обработка графической информации Презентация1
Презентация1 Конструкции структурного программирования в Си
Конструкции структурного программирования в Си 1С: Управление холдингом
1С: Управление холдингом Программирование линейных алгоритмов. Начала программирования
Программирование линейных алгоритмов. Начала программирования Аналитическия статья
Аналитическия статья БД_л3_Типы_данных_констрейны
БД_л3_Типы_данных_констрейны Циклы. Повторение
Циклы. Повторение Правила безопасности при работе с интернет источниками. Выбор источников информации
Правила безопасности при работе с интернет источниками. Выбор источников информации Условные операторы
Условные операторы Моя жизнь в моём мире
Моя жизнь в моём мире Репортаж и интервью
Репортаж и интервью Понятие национальной безопасности
Понятие национальной безопасности Програмные средства математических расчётов
Програмные средства математических расчётов Программирование на языке Паскаль
Программирование на языке Паскаль Электронная идентификация
Электронная идентификация ВКР: Модернизация автоматизированного стенда для испытания приборов серии РДНК
ВКР: Модернизация автоматизированного стенда для испытания приборов серии РДНК Память ЭВМ. Единицы измерения. (4 класс)
Память ЭВМ. Единицы измерения. (4 класс) Организация работы по закупкам товаров, работ, услуг с использованием автоматизированной системы АЦК - Госзаказ
Организация работы по закупкам товаров, работ, услуг с использованием автоматизированной системы АЦК - Госзаказ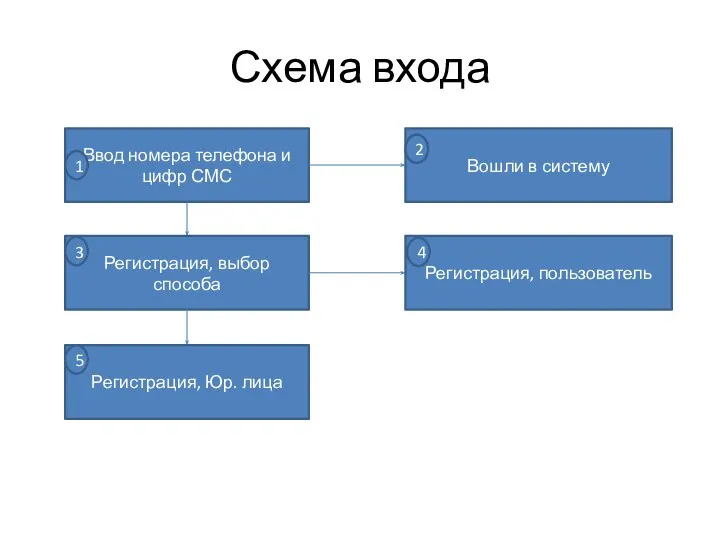 Залогинивание
Залогинивание Презентация на тему Системы счисления (10 класс)
Презентация на тему Системы счисления (10 класс)  Работа с разделом Техническая поддержка. TPVision
Работа с разделом Техническая поддержка. TPVision Ustroystvo_kompyutera_i_periferiynoe_oborudovanie
Ustroystvo_kompyutera_i_periferiynoe_oborudovanie Электронно-цифровая подпись
Электронно-цифровая подпись Бриф от издательства и сети магазинов настольных игр GaGa.ru
Бриф от издательства и сети магазинов настольных игр GaGa.ru