- Основные положения кибернетики. Лекция №1

Содержание
- 2. Кибернетика – наука об управлении, изучающая общие закономерности строения сложных систем управления и протекания в них
- 3. Регулятор в водяных часах Ктесибиоса Примеры регулируемых систем Магическое открывание дверей Герона Александрийского Центробежный регулятор Дж.
- 4. 1834 г. – французский физик А.М. Ампер выпустил книгу «Опыт о философии наук или аналитическое изложение
- 5. Математические основы теории управления Устойчивость Дж. Максвелл (1831-1879) И.А. Вышнеградский (1832-1895) А.М. Ляпунов (1857—1918) А. Стодола
- 6. Математические основы теории управления В середине 40-х разработал первую цифровую машину США. Фон Нейман является создателем
- 7. Математические основы теории управления Кибернетика в России А.И. Берг В.М. Глушков С.А. Лебедев В.А. Котельников
- 8. Процессы управления в живых организмах Основы рефлекторной теории Машинность мозга И.М. Сеченов (1829-1905) И.П. Павлов (1849-1936)
- 9. Процессы управления в живых организмах Н.М. Амосов (1913-2002) Описал четыре типа регулирующих систем организма: Химическая неспецифическая
- 10. Кибернетика и предмет кибернетики Кибернетика – наука об управлении и связи в животном и машине. Н.
- 11. Кибернетика в системе наук Кибернетика Социально-экономические науки Гуманитарные науки Биологические науки Бионика Технические науки Физико-математические науки
- 12. Биокибернетика Биологическая кибернетика – направление кибернетики, изучающее общие законы хранения, переработки и передачи информации в биологических
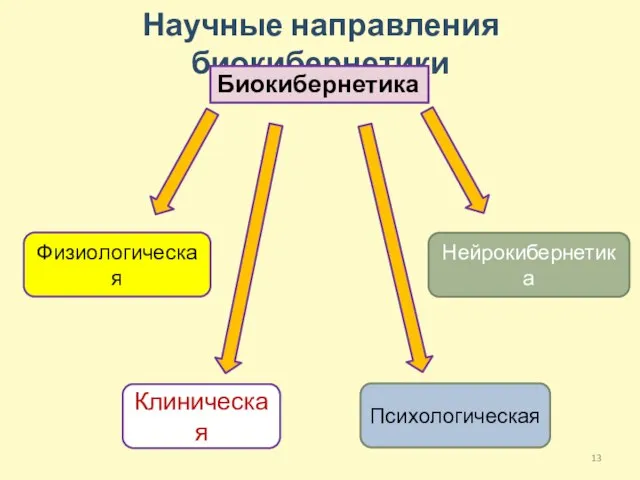
- 13. Научные направления биокибернетики Биокибернетика Физиологическая Клиническая Психологическая Нейрокибернетика
- 14. Научные направления биокибернетики Физиологическая кибернетика – направление кибернетики, изучающее сложность структурной и функциональной организации элементов, органов
- 15. Научные направления биокибернетики Медицинская кибернетика – направление кибернетики, изучающее сложность структурной и функциональной организации элементов, органов
- 16. Моделирование – метод кибернетики Модель – это материальный (искусственный или естественный), идеальный (мысленный, абстрактный) или знаковый
- 17. Цепочка получения истинного знания Теория Эксперимент МОДЕЛЬ Путь изучения биосистем и построения теории их работы прямо
- 18. Свойства живых систем Открытость, т.е. использование обмена (энергией, пищей) для компенсации собственных энергетических затрат и исправления
- 19. Задачи управления Способы построения систем управления
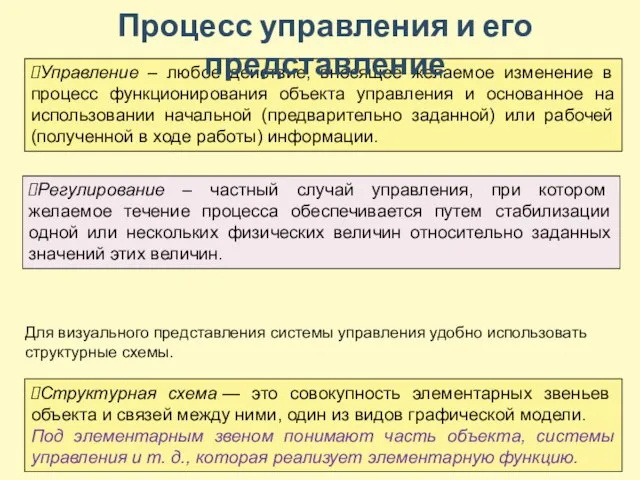
- 20. Управление – любое действие, вносящее желаемое изменение в процесс функционирования объекта управления и основанное на использовании
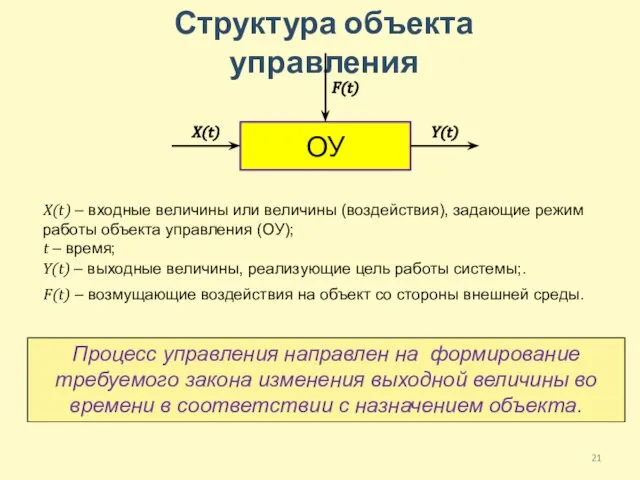
- 21. Процесс управления направлен на формирование требуемого закона изменения выходной величины во времени в соответствии с назначением
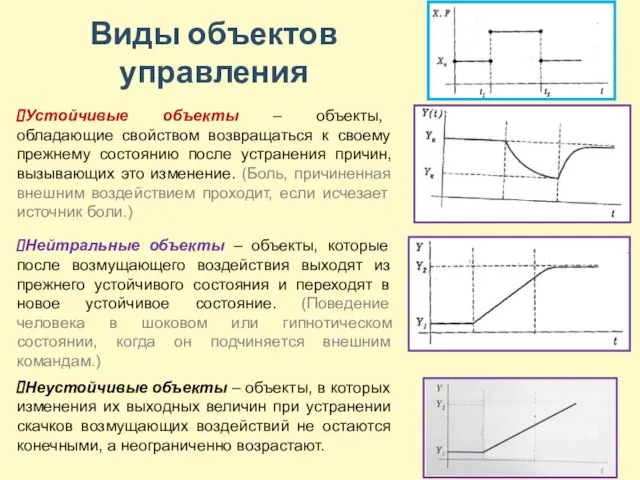
- 22. Виды объектов управления Устойчивые объекты – объекты, обладающие свойством возвращаться к своему прежнему состоянию после устранения
- 23. Структура управляющих систем ЗУ - задающее устройство ИУ - измерительное устройство СУ - сравнивающее устройство ИО
- 24. Принцип управления по заданию. Принцип управления по возмущению (системы автоматической коррекции). Управление по отклонению или ошибке.
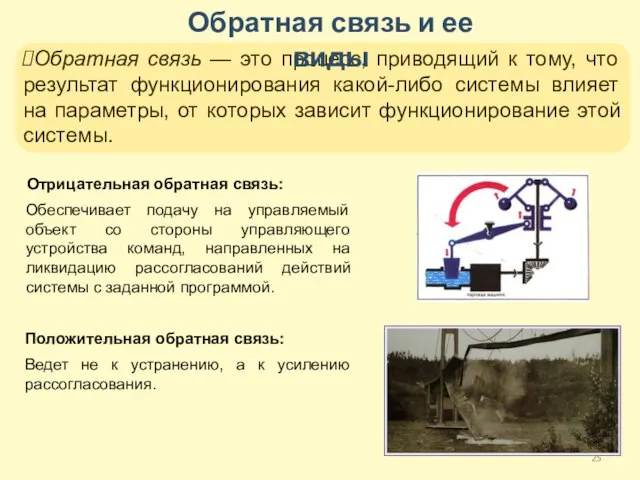
- 25. Обратная связь — это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры,
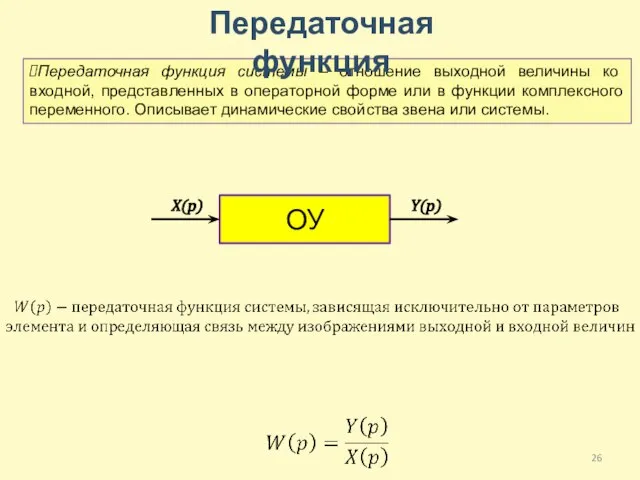
- 26. Передаточная функция системы – отношение выходной величины ко входной, представленных в операторной форме или в функции
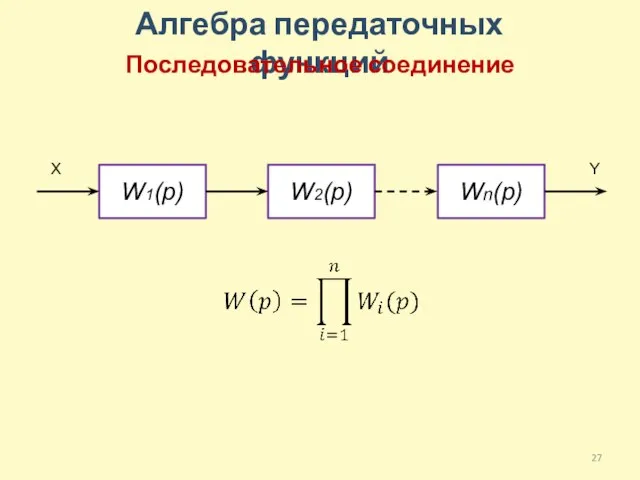
- 27. Алгебра передаточных функций Последовательное соединение
- 28. Алгебра передаточных функций Параллельное соединение
- 29. С обратной связью без преобразования выходного сигнала Алгебра передаточных функций
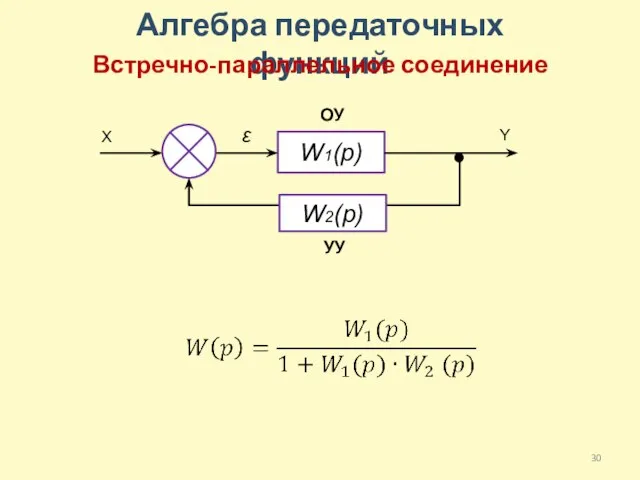
- 30. Алгебра передаточных функций Встречно-параллельное соединение
- 31. Модели в виде сигнальных графов Сигнальный граф – диаграмма, состоящая из узлов, соединенных между собой отдельными
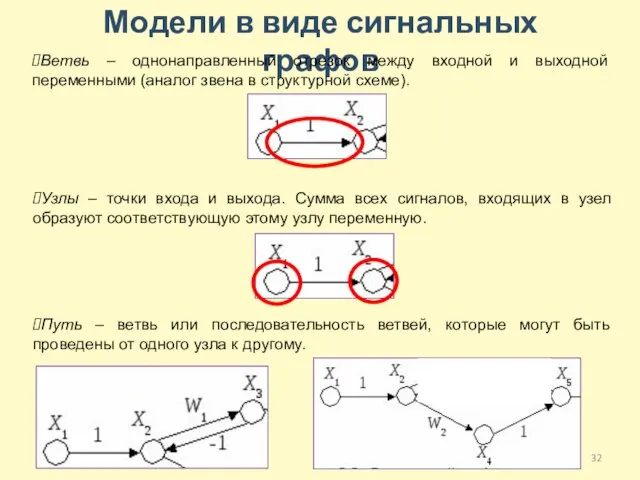
- 32. Модели в виде сигнальных графов Ветвь – однонаправленный отрезок между входной и выходной переменными (аналог звена
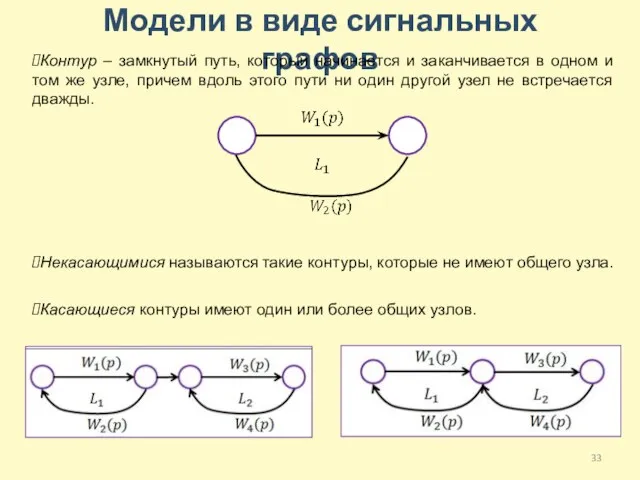
- 33. Модели в виде сигнальных графов Контур – замкнутый путь, который начинается и заканчивается в одном и
- 34. Сигнальный граф с параллельными путями Пример Вычислить величины путей и контуров в сигнальном графе. Контуры: Пути:
- 35. Березин, С. Я. Основы кибернетики и управление в биологических и медицинских системах: учеб. пособие / С.
- 36. Правила преобразования структурных схем Перенос сумматора через блок с передаточной функцией по ходу сигнала Перенос сумматора
- 37. Правила преобразования структурных схем Перенос узла через блок с передаточной функцией против движения сигнала Перенос узла
- 38. Моделирование – метод кибернетики ТЕОРИЯ
- 39. 2. Принцип управления по возмущению Принципы автоматического управления Достоинства систем управления по возмущению: В системах управления
- 40. Алгебра передаточных функций Пример преобразования многоконтурной системы
- 41. Алгебра передаточных функций Пример преобразования многоконтурной системы
- 42. Алгебра передаточных функций Пример преобразования многоконтурной системы
- 43. Алгебра передаточных функций Пример преобразования многоконтурной системы
- 44. Правила построения графа по структурной схеме Модифицировать структурную схему так, чтобы в сумматорах все переменные складывались
- 45. Правила преобразования элементов структурной схемы в элементы сигнального графа
- 46. Правила преобразования элементов структурной схемы в элементы сигнального графа
- 47. Правила построения графа по структурной схеме Пример
- 49. Скачать презентацию
Слайд 2Кибернетика – наука об управлении, изучающая общие закономерности строения сложных систем управления
Кибернетика – наука об управлении, изучающая общие закономерности строения сложных систем управления
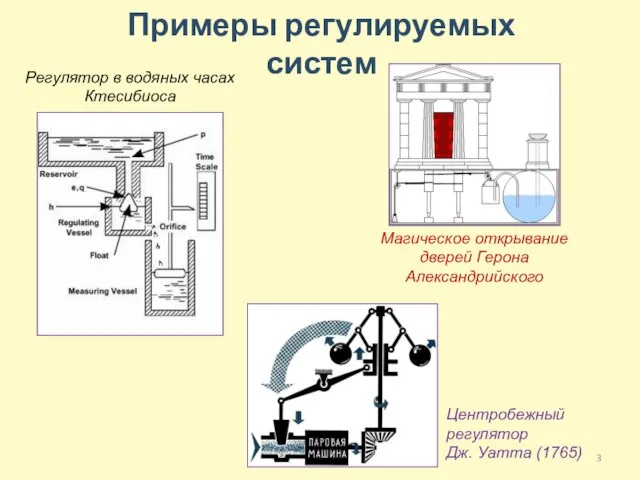
Слайд 3Регулятор в водяных часах
Ктесибиоса
Примеры регулируемых систем
Магическое открывание дверей Герона Александрийского
Центробежный регулятор
Регулятор в водяных часах
Ктесибиоса
Примеры регулируемых систем
Магическое открывание дверей Герона Александрийского
Центробежный регулятор
Слайд 41834 г. – французский физик А.М. Ампер выпустил книгу «Опыт о философии
1834 г. – французский физик А.М. Ампер выпустил книгу «Опыт о философии

Слайд 5Математические основы теории управления
Устойчивость
Дж. Максвелл
(1831-1879)
И.А. Вышнеградский
(1832-1895)
А.М. Ляпунов
(1857—1918)
А. Стодола
(1859—1942)
А. Гурвиц
(1895 – 1919)
Г. Найквист
(1889
Математические основы теории управления
Устойчивость
Дж. Максвелл
(1831-1879)
И.А. Вышнеградский
(1832-1895)
А.М. Ляпунов
(1857—1918)
А. Стодола
(1859—1942)
А. Гурвиц
(1895 – 1919)
Г. Найквист
(1889

Слайд 6Математические основы теории управления
В середине 40-х разработал первую цифровую машину США.
Фон Нейман
Математические основы теории управления
В середине 40-х разработал первую цифровую машину США.
Фон Нейман
Слайд 7Математические основы теории управления
Кибернетика в России
А.И. Берг
В.М. Глушков
С.А. Лебедев
В.А. Котельников
Математические основы теории управления
Кибернетика в России
А.И. Берг
В.М. Глушков
С.А. Лебедев
В.А. Котельников

Слайд 8Процессы управления в живых организмах
Основы рефлекторной теории
Машинность мозга
И.М. Сеченов
(1829-1905)
И.П. Павлов
(1849-1936)
Ввел в
Процессы управления в живых организмах
Основы рефлекторной теории
Машинность мозга
И.М. Сеченов
(1829-1905)
И.П. Павлов
(1849-1936)
Ввел в

Слайд 9Процессы управления в живых организмах
Н.М. Амосов
(1913-2002)
Описал четыре типа регулирующих систем организма:
Химическая неспецифическая
Эндокринная
Процессы управления в живых организмах
Н.М. Амосов
(1913-2002)
Описал четыре типа регулирующих систем организма:
Химическая неспецифическая
Эндокринная
Слайд 10Кибернетика и предмет кибернетики
Кибернетика – наука об управлении и связи в животном
Кибернетика и предмет кибернетики
Кибернетика – наука об управлении и связи в животном

Слайд 11Кибернетика в системе наук
Кибернетика
Социально-экономические науки
Гуманитарные науки
Биологические науки
Бионика
Технические науки
Физико-математические науки
Философия
Кибернетика в системе наук
Кибернетика
Социально-экономические науки
Гуманитарные науки
Биологические науки
Бионика
Технические науки
Физико-математические науки
Философия

Слайд 12Биокибернетика
Биологическая кибернетика – направление кибернетики, изучающее общие законы хранения, переработки и передачи
Биокибернетика
Биологическая кибернетика – направление кибернетики, изучающее общие законы хранения, переработки и передачи
Слайд 13Научные направления биокибернетики
Биокибернетика
Физиологическая
Клиническая
Психологическая
Нейрокибернетика
Научные направления биокибернетики
Биокибернетика
Физиологическая
Клиническая
Психологическая
Нейрокибернетика
Слайд 14Научные направления биокибернетики
Физиологическая кибернетика – направление кибернетики, изучающее сложность структурной и функциональной
Научные направления биокибернетики
Физиологическая кибернетика – направление кибернетики, изучающее сложность структурной и функциональной
Слайд 15Научные направления биокибернетики
Медицинская кибернетика – направление кибернетики, изучающее сложность структурной и функциональной
Научные направления биокибернетики
Медицинская кибернетика – направление кибернетики, изучающее сложность структурной и функциональной
Слайд 16Моделирование – метод кибернетики
Модель – это материальный (искусственный или естественный), идеальный (мысленный,
Моделирование – метод кибернетики
Модель – это материальный (искусственный или естественный), идеальный (мысленный,
Слайд 17Цепочка получения истинного знания
Теория
Эксперимент
МОДЕЛЬ
Путь изучения биосистем и построения теории их работы прямо
Цепочка получения истинного знания
Теория
Эксперимент
МОДЕЛЬ
Путь изучения биосистем и построения теории их работы прямо

Слайд 18Свойства живых систем
Открытость, т.е. использование обмена (энергией, пищей) для компенсации собственных энергетических
Свойства живых систем
Открытость, т.е. использование обмена (энергией, пищей) для компенсации собственных энергетических

Слайд 19Задачи управления
Способы построения систем управления
Задачи управления
Способы построения систем управления
Слайд 20Управление – любое действие, вносящее желаемое изменение в процесс функционирования объекта управления
Управление – любое действие, вносящее желаемое изменение в процесс функционирования объекта управления
Слайд 21Процесс управления направлен на формирование требуемого закона изменения выходной величины во времени
Процесс управления направлен на формирование требуемого закона изменения выходной величины во времени
Слайд 22Виды объектов управления
Устойчивые объекты – объекты, обладающие свойством возвращаться к своему прежнему
Виды объектов управления
Устойчивые объекты – объекты, обладающие свойством возвращаться к своему прежнему
Слайд 23Структура управляющих систем
ЗУ - задающее устройство
ИУ - измерительное устройство
СУ - сравнивающее устройство
Структура управляющих систем
ЗУ - задающее устройство
ИУ - измерительное устройство
СУ - сравнивающее устройство

Слайд 24Принцип управления по заданию.
Принцип управления по возмущению (системы автоматической коррекции).
Управление по отклонению
Принцип управления по заданию.
Принцип управления по возмущению (системы автоматической коррекции).
Управление по отклонению
Слайд 25Обратная связь — это процесс, приводящий к тому, что результат функционирования какой-либо
Обратная связь — это процесс, приводящий к тому, что результат функционирования какой-либо
Слайд 26
Передаточная функция системы – отношение выходной величины ко входной, представленных в операторной
Передаточная функция системы – отношение выходной величины ко входной, представленных в операторной
Слайд 27Алгебра передаточных функций
Последовательное соединение
Алгебра передаточных функций
Последовательное соединение
Слайд 28Алгебра передаточных функций
Параллельное соединение
Алгебра передаточных функций
Параллельное соединение

Слайд 29С обратной связью без преобразования выходного сигнала
Алгебра передаточных функций
С обратной связью без преобразования выходного сигнала
Алгебра передаточных функций

Слайд 30Алгебра передаточных функций
Встречно-параллельное соединение
Алгебра передаточных функций
Встречно-параллельное соединение
Слайд 31Модели в виде сигнальных графов
Сигнальный граф – диаграмма, состоящая из узлов, соединенных
Модели в виде сигнальных графов
Сигнальный граф – диаграмма, состоящая из узлов, соединенных

Слайд 32Модели в виде сигнальных графов
Ветвь – однонаправленный отрезок между входной и выходной
Модели в виде сигнальных графов
Ветвь – однонаправленный отрезок между входной и выходной
Слайд 33Модели в виде сигнальных графов
Контур – замкнутый путь, который начинается и заканчивается
Модели в виде сигнальных графов
Контур – замкнутый путь, который начинается и заканчивается
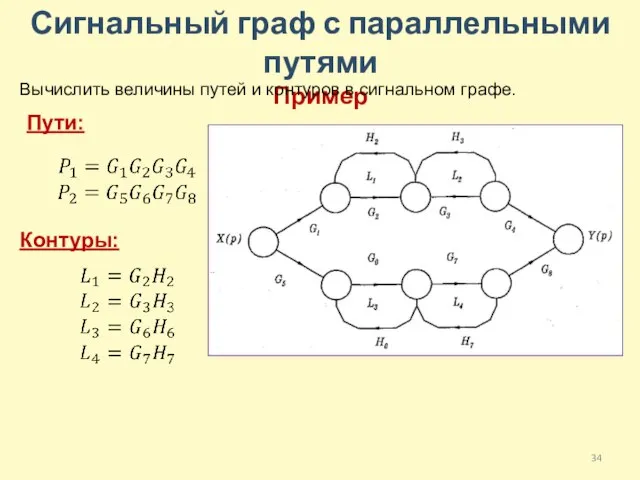
Слайд 34Сигнальный граф с параллельными путями
Пример
Вычислить величины путей и контуров в сигнальном графе.
Контуры:
Пути:
Сигнальный граф с параллельными путями
Пример
Вычислить величины путей и контуров в сигнальном графе.
Контуры:
Пути:
Слайд 35Березин, С. Я. Основы кибернетики и управление в биологических и медицинских системах:
Березин, С. Я. Основы кибернетики и управление в биологических и медицинских системах:
Слайд 36Правила преобразования структурных схем
Перенос сумматора через блок с передаточной функцией по ходу
Правила преобразования структурных схем
Перенос сумматора через блок с передаточной функцией по ходу

Слайд 37Правила преобразования структурных схем
Перенос узла через блок с передаточной функцией против движения
Правила преобразования структурных схем
Перенос узла через блок с передаточной функцией против движения

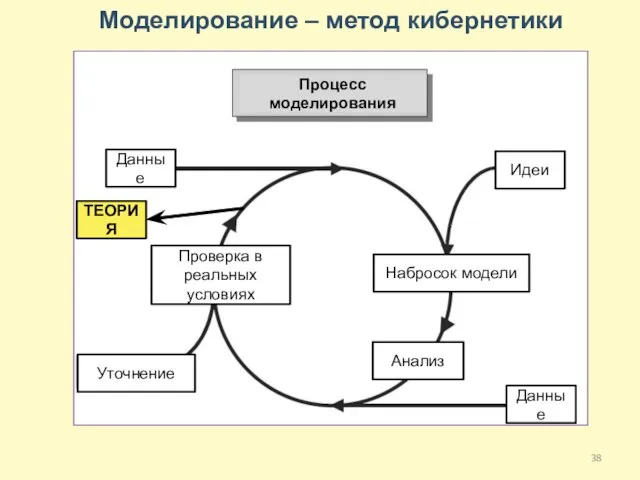
Слайд 38Моделирование – метод кибернетики
ТЕОРИЯ
Моделирование – метод кибернетики
ТЕОРИЯ
Слайд 392. Принцип управления по возмущению
Принципы автоматического управления
Достоинства систем управления по возмущению:
В системах
2. Принцип управления по возмущению
Принципы автоматического управления
Достоинства систем управления по возмущению:
В системах

Слайд 40Алгебра передаточных функций
Пример преобразования многоконтурной системы
Алгебра передаточных функций
Пример преобразования многоконтурной системы

Слайд 41Алгебра передаточных функций
Пример преобразования многоконтурной системы
Алгебра передаточных функций
Пример преобразования многоконтурной системы

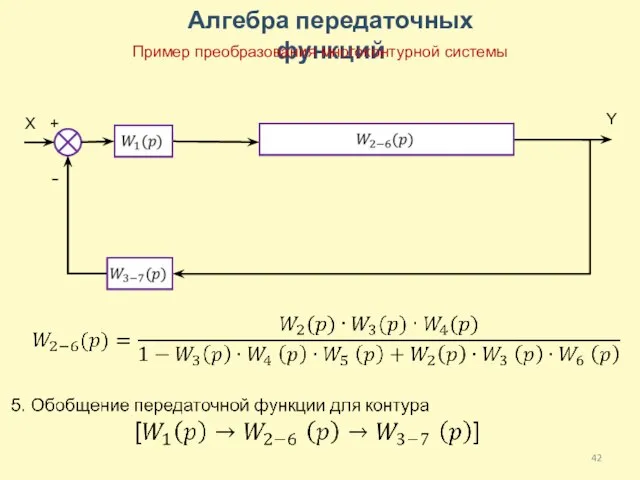
Слайд 42Алгебра передаточных функций
Пример преобразования многоконтурной системы
Алгебра передаточных функций
Пример преобразования многоконтурной системы
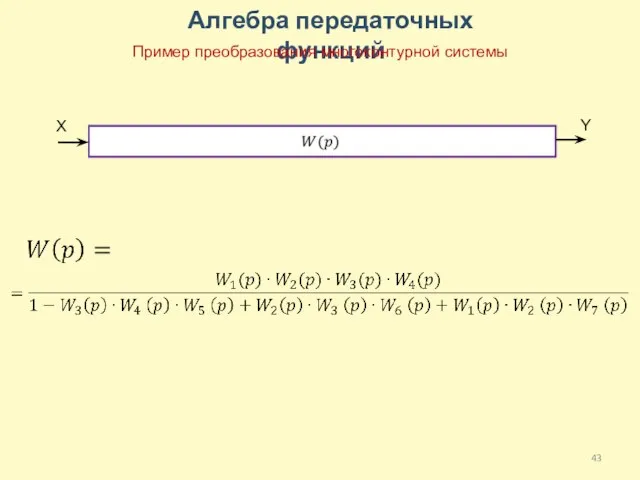
Слайд 43Алгебра передаточных функций
Пример преобразования многоконтурной системы
Алгебра передаточных функций
Пример преобразования многоконтурной системы
Слайд 44Правила построения графа по структурной схеме
Модифицировать структурную схему так, чтобы в сумматорах
Правила построения графа по структурной схеме
Модифицировать структурную схему так, чтобы в сумматорах

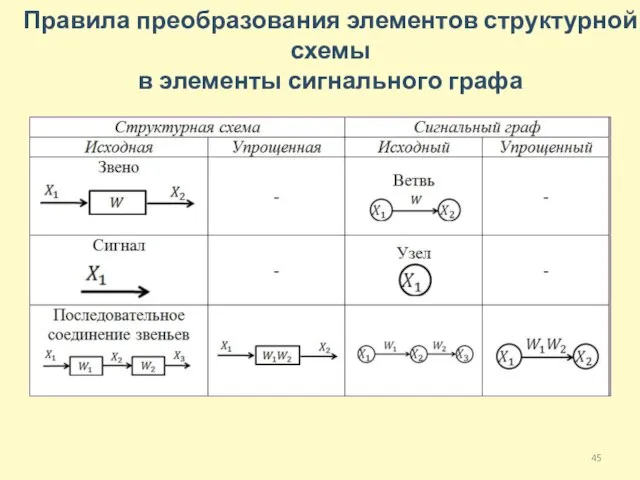
Слайд 45Правила преобразования элементов структурной схемы
в элементы сигнального графа
Правила преобразования элементов структурной схемы
в элементы сигнального графа
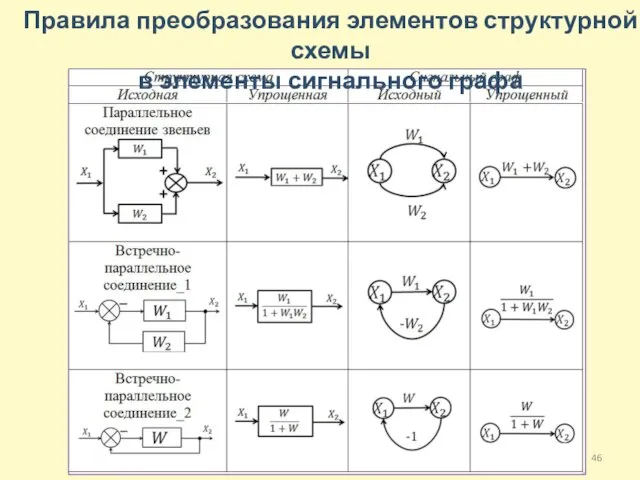
Слайд 46Правила преобразования элементов структурной схемы
в элементы сигнального графа
Правила преобразования элементов структурной схемы
в элементы сигнального графа
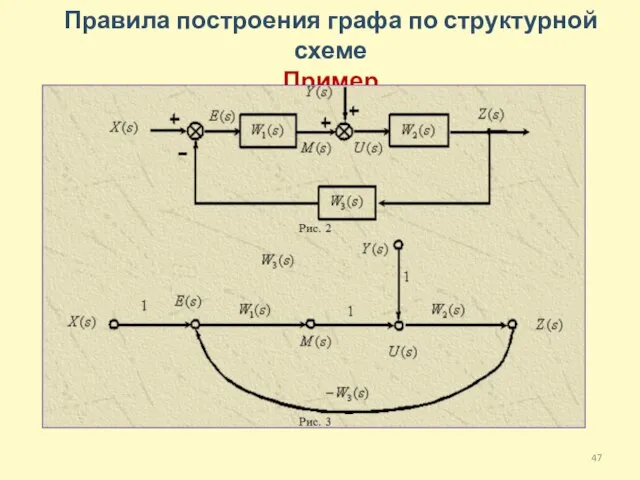
Слайд 47Правила построения графа по структурной схеме
Пример
Правила построения графа по структурной схеме
Пример
 Лабораторная работа. СКУД с функцией запрета двойного прохода
Лабораторная работа. СКУД с функцией запрета двойного прохода Аутентификация и идентификация. Программно-технические способы реализации идентификации и аутентификации
Аутентификация и идентификация. Программно-технические способы реализации идентификации и аутентификации На отработку по web программированию
На отработку по web программированию Data centre services in Estonia
Data centre services in Estonia Защита практики. План СКС ОАО “З design”
Защита практики. План СКС ОАО “З design” Чат помощи для молодых мам
Чат помощи для молодых мам Электронные таблицы. Основные понятия и способ организации
Электронные таблицы. Основные понятия и способ организации Предметно-ориентированный язык
Предметно-ориентированный язык Проектное решение
Проектное решение Поисковые системы Internet
Поисковые системы Internet Система автоматизированного проектирования AUTOCAD
Система автоматизированного проектирования AUTOCAD Знаковые информационные модели
Знаковые информационные модели Объекты мультимедиа
Объекты мультимедиа Программирование в виде релейно-контактных схем
Программирование в виде релейно-контактных схем управление компьютером
управление компьютером Объектно-ориентированное программирование на языке С++
Объектно-ориентированное программирование на языке С++ Республиканский экспертный совет
Республиканский экспертный совет Безопасный Интернет
Безопасный Интернет Основные типы данных в Python. Массивы
Основные типы данных в Python. Массивы Персональный компьютер. Компьютер как универсальное устройство для работы с информацией. Информатика, 7 класс
Персональный компьютер. Компьютер как универсальное устройство для работы с информацией. Информатика, 7 класс Нахождение логического выражения по таблице истинности
Нахождение логического выражения по таблице истинности Графы. Вершина графа. Ребро графа
Графы. Вершина графа. Ребро графа NATUS VINCERE. Рожденные побеждать
NATUS VINCERE. Рожденные побеждать Компьютерные энциклопедии и справочники
Компьютерные энциклопедии и справочники Компьютерная помощница - мышь Урок 3. 5 класс
Компьютерная помощница - мышь Урок 3. 5 класс Презентация на тему Изучаем Паскаль
Презентация на тему Изучаем Паскаль  Индустрия встреч как сегмент мировой ивент индустрии
Индустрия встреч как сегмент мировой ивент индустрии Специфика поиска и обработки информации в спортивной журналистике
Специфика поиска и обработки информации в спортивной журналистике