- Расчёт и проектирование системы навигации мобильного робота

Содержание
- 2. Целью данной работы является разработка структурной схемы системы навигации мобильного робота. Задачи исследования: Исследование основ локальной
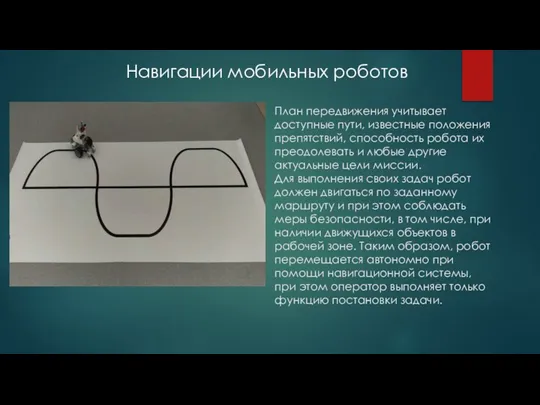
- 3. План передвижения учитывает доступные пути, известные положения препятствий, способность робота их преодолевать и любые другие актуальные
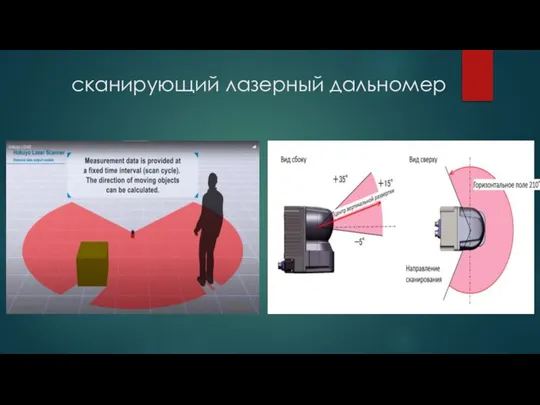
- 4. сканирующий лазерный дальномер
- 5. разработка робота
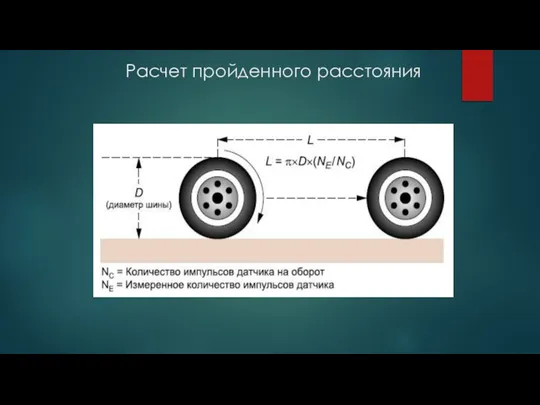
- 6. Расчет пройденного расстояния
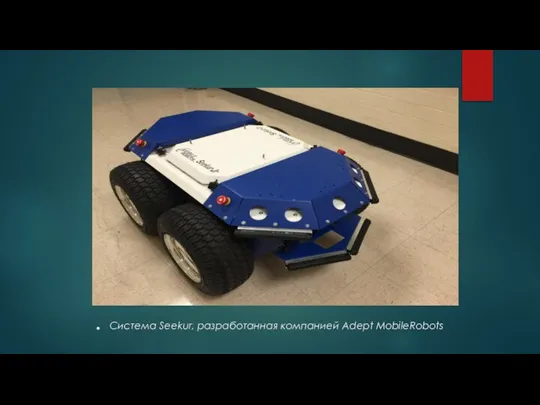
- 7. . Система Seekur, разработанная компанией Adept MobileRobots
- 10. Скачать презентацию
Слайд 2Целью данной работы является разработка структурной схемы системы навигации мобильного робота.
Задачи исследования:
Исследование
Целью данной работы является разработка структурной схемы системы навигации мобильного робота.
Задачи исследования:
Исследование
Слайд 3План передвижения учитывает доступные пути, известные положения препятствий, способность робота их преодолевать
План передвижения учитывает доступные пути, известные положения препятствий, способность робота их преодолевать
Слайд 4сканирующий лазерный дальномер
сканирующий лазерный дальномер
Слайд 5разработка робота
разработка робота

Слайд 6Расчет пройденного расстояния
Расчет пройденного расстояния
Слайд 7. Система Seekur, разработанная компанией Adept MobileRobots
. Система Seekur, разработанная компанией Adept MobileRobots

 Форма для поиска уже существующих статей блога “Blog search form”
Форма для поиска уже существующих статей блога “Blog search form” Продвижение в социальных сетях
Продвижение в социальных сетях Основы комплексной системы защиты информации
Основы комплексной системы защиты информации Проверка кандидата
Проверка кандидата Welcome to Hell - оffice
Welcome to Hell - оffice Read and translate the poster
Read and translate the poster Как создать конференцию в ZOOM
Как создать конференцию в ZOOM Всё есть число. Пифагорийцы
Всё есть число. Пифагорийцы Логические основы компьютера
Логические основы компьютера Kia how to электронная подпись
Kia how to электронная подпись Одномерные массивы: задачи сортировок элементов массива. Лекция 7
Одномерные массивы: задачи сортировок элементов массива. Лекция 7 Кибербезопасность. Прекрасный, опасный, кибербезопасный мир
Кибербезопасность. Прекрасный, опасный, кибербезопасный мир Windows 11 – операционная система 2021
Windows 11 – операционная система 2021 Компьютерные Вирусы
Компьютерные Вирусы Мир информатики
Мир информатики Базы данных ка модель предметной области
Базы данных ка модель предметной области Mein Lieblingsautor ist Stan Lee
Mein Lieblingsautor ist Stan Lee Массивы в Javascript
Массивы в Javascript Машинное обучение на языке программирования Python
Машинное обучение на языке программирования Python Условия. Ветвление алгоритма. Конструкция логического выбора if
Условия. Ветвление алгоритма. Конструкция логического выбора if Печатать ПРЕЗЕНТАЦИЯ
Печатать ПРЕЗЕНТАЦИЯ Библиотека села Ныр
Библиотека села Ныр Работа с файлами (ввод и вывод)
Работа с файлами (ввод и вывод) Основные понятия реляционной БД
Основные понятия реляционной БД Изучение функционирования системы
Изучение функционирования системы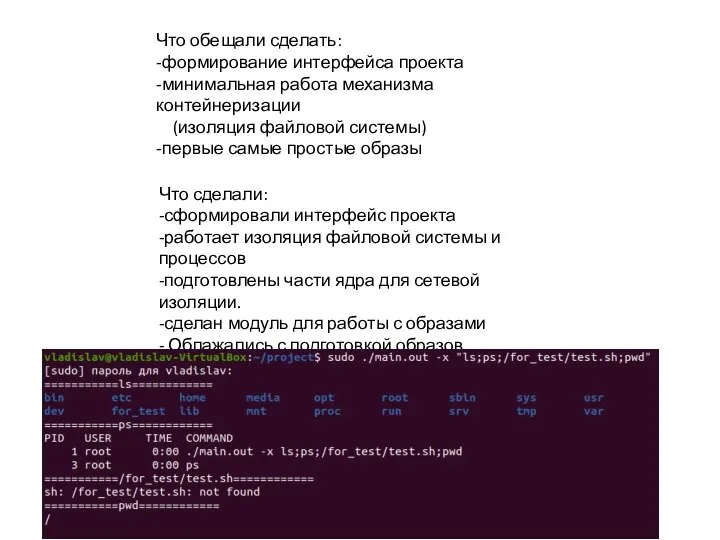 Формирование интерфейса проекта
Формирование интерфейса проекта Компьютерное моделирование/ Геофизика
Компьютерное моделирование/ Геофизика “Правда или действие”. Игра
“Правда или действие”. Игра