Использование кватернионов в решении задачи навигации в трехмерном пространстве при помощи выделенных линейных объектов
- Использование кватернионов в решении задачи навигации в трехмерном пространстве при помощи выделенных линейных объектов

Содержание
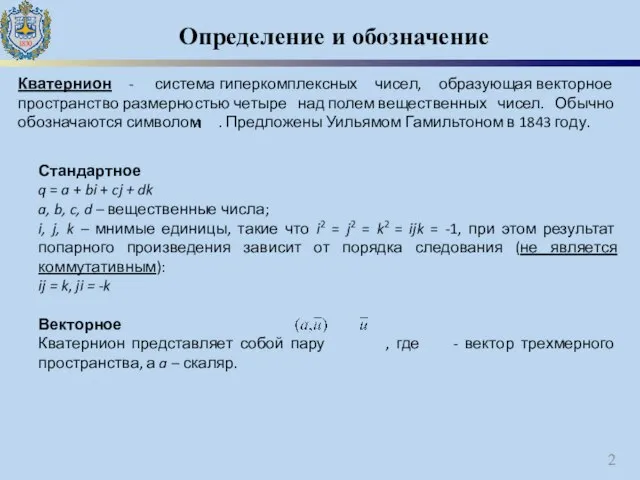
- 2. Определение и обозначение
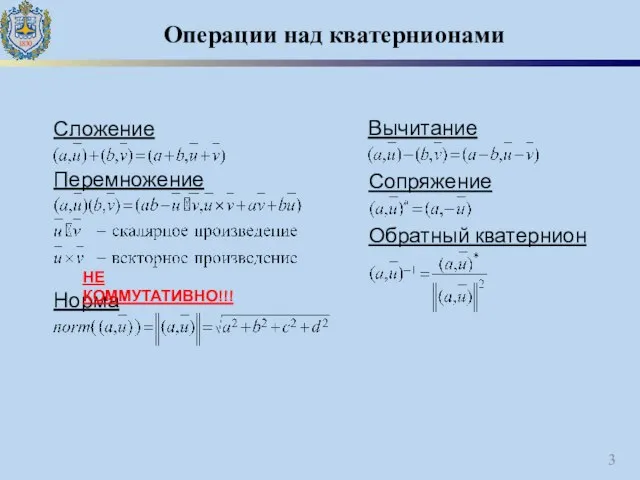
- 3. Операции над кватернионами
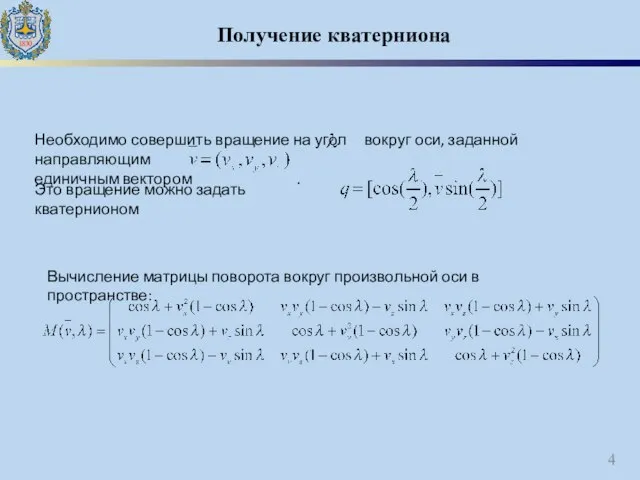
- 4. Получение кватерниона
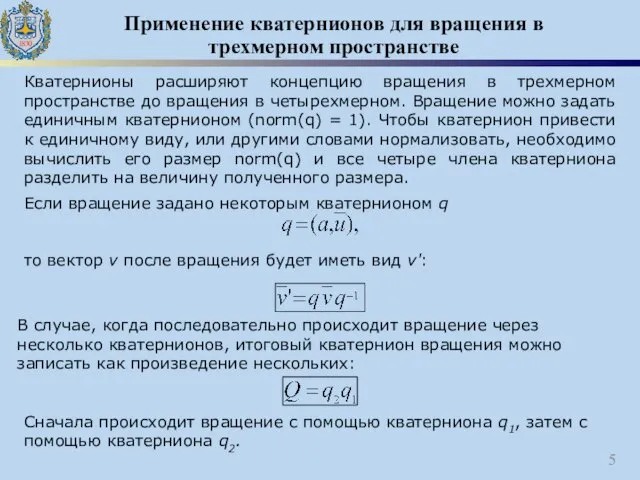
- 5. Применение кватернионов для вращения в трехмерном пространстве Кватернионы расширяют концепцию вращения в трехмерном пространстве до вращения
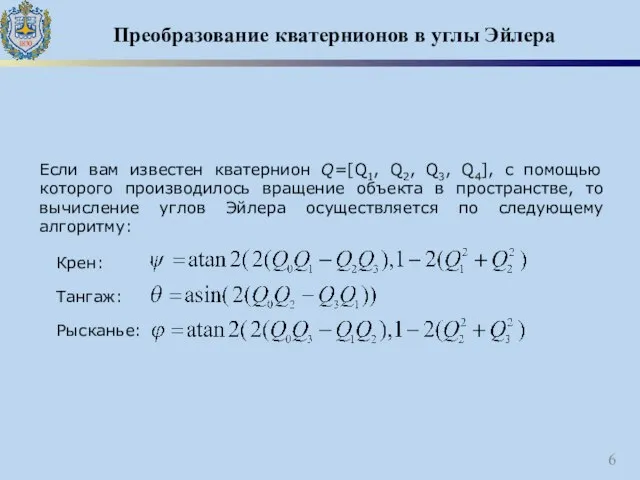
- 6. Преобразование кватернионов в углы Эйлера
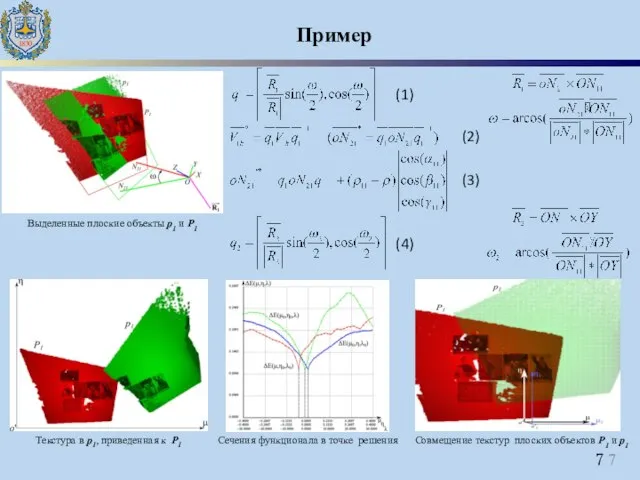
- 7. Пример Выделенные плоские объекты р1 и P1 Текстура в р1, приведенная к P1 Совмещение текстур плоских
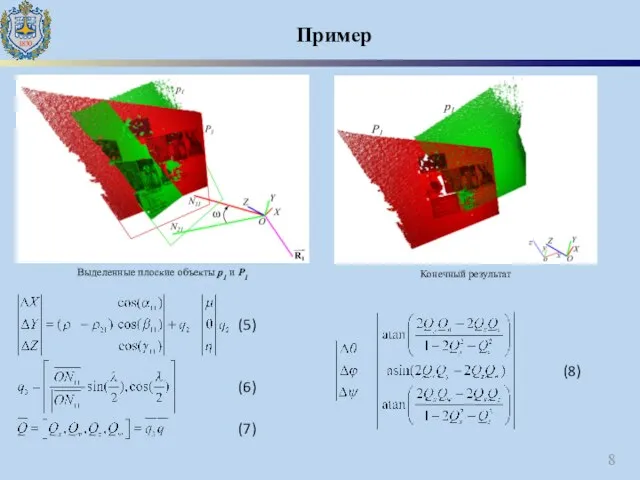
- 8. Выделенные плоские объекты р1 и P1 Конечный результат (5) (6) (7) (8) Пример
- 10. Скачать презентацию
Слайд 3Операции над кватернионами
Операции над кватернионами
Слайд 4Получение кватерниона
Получение кватерниона
Слайд 5Применение кватернионов для вращения в трехмерном пространстве
Кватернионы расширяют концепцию вращения в трехмерном
Применение кватернионов для вращения в трехмерном пространстве
Кватернионы расширяют концепцию вращения в трехмерном
Слайд 6Преобразование кватернионов в углы Эйлера
Преобразование кватернионов в углы Эйлера
Слайд 7Пример
Выделенные плоские объекты р1 и P1
Текстура в р1, приведенная к P1
Совмещение текстур
Пример
Выделенные плоские объекты р1 и P1
Текстура в р1, приведенная к P1
Совмещение текстур
Слайд 8Выделенные плоские объекты р1 и P1
Конечный результат
(5)
(6)
(7)
(8)
Пример
Выделенные плоские объекты р1 и P1
Конечный результат
(5)
(6)
(7)
(8)
Пример
 Математика. Раздел 6. Метод координат в пространстве. Занятие 66. Уравнение плоскости
Математика. Раздел 6. Метод координат в пространстве. Занятие 66. Уравнение плоскости Решение тригонометрических неравенств
Решение тригонометрических неравенств Дискретная математика
Дискретная математика Упрощение выражений. Тест
Упрощение выражений. Тест Шар. Радиус. Центр
Шар. Радиус. Центр Логарифмическая функция, ее свойства и график
Логарифмическая функция, ее свойства и график Уравнением с двумя переменными
Уравнением с двумя переменными Преимущества УМК системы РО Л.В.Занкова при подготовке к ВПР по математике
Преимущества УМК системы РО Л.В.Занкова при подготовке к ВПР по математике Презентация на тему Построение точек по заданным координатам
Презентация на тему Построение точек по заданным координатам  Презентация на тему Десятичные дроби (5 класс)
Презентация на тему Десятичные дроби (5 класс)  Треугольники. Равенство треугольников
Треугольники. Равенство треугольников Задачи на движение в противоположных направлениях
Задачи на движение в противоположных направлениях Презентация по математике "Выполните задание !" -
Презентация по математике "Выполните задание !" -  Презентация на тему Виды треугольников
Презентация на тему Виды треугольников  Многогранники на службе у человека
Многогранники на службе у человека Перпендикулярные прямые
Перпендикулярные прямые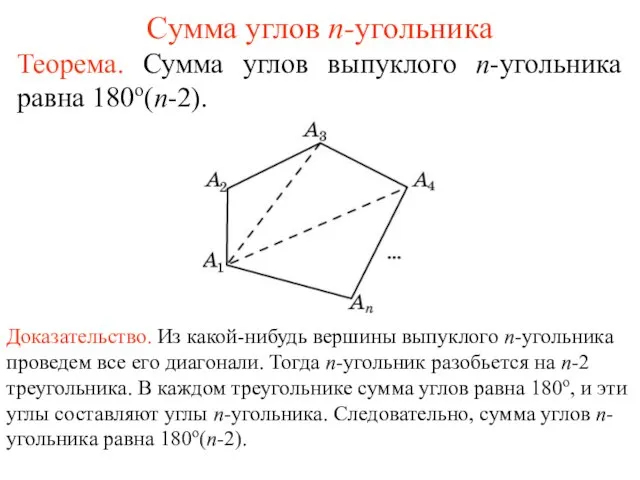 Презентация на тему Сумма углов n-угольника
Презентация на тему Сумма углов n-угольника  Презентация на тему Признаки делимости от 2 до 15
Презентация на тему Признаки делимости от 2 до 15  Сложение и вычитание рациональных чисел
Сложение и вычитание рациональных чисел Правильная пирамида
Правильная пирамида Презентация на тему Внетабличное умножение и деление
Презентация на тему Внетабличное умножение и деление  Закрепление таблицы умножения и деления
Закрепление таблицы умножения и деления Вписанный угол
Вписанный угол 12. Тэтраэдр
12. Тэтраэдр Двійкова арифметика
Двійкова арифметика ИСТОРИЯ СИСТЕМ СЧИСЛЕНИЯ
ИСТОРИЯ СИСТЕМ СЧИСЛЕНИЯ Задача Иосифа Флавия
Задача Иосифа Флавия Способы решения уравнений высших степеней
Способы решения уравнений высших степеней