- Непрерывно-стохастические модели

Содержание
- 2. УЧЕБНЫЕ ВОПРОСЫ: 1. Марковские случайные процессы с дискретными состояниями и непрерывным временем. 2. Предельные вероятности состояний.
- 3. Вопрос 1. Марковские случайные процессы с дискретными состояниями и непрерывным временем
- 4. Процессы в системах с дискретными состояниями, меняющимися в случайные моменты времени, называются случайными процессами с дискретными
- 5. Вместо переходных вероятностей Pij вводятся плотности вероятностей перехода λij. Пусть система S в момент времени t
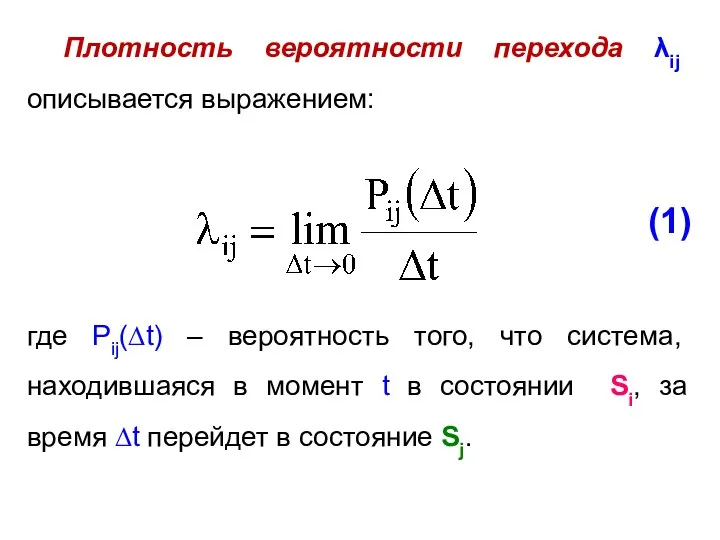
- 6. Плотность вероятности перехода λij описывается выражением: (1) где Pij(∆t) – вероятность того, что система, находившаяся в
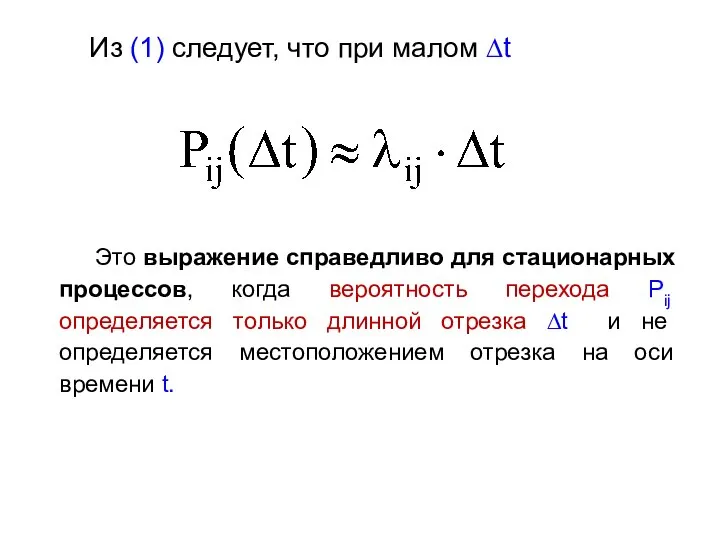
- 7. Из (1) следует, что при малом ∆t Это выражение справедливо для стационарных процессов, когда вероятность перехода
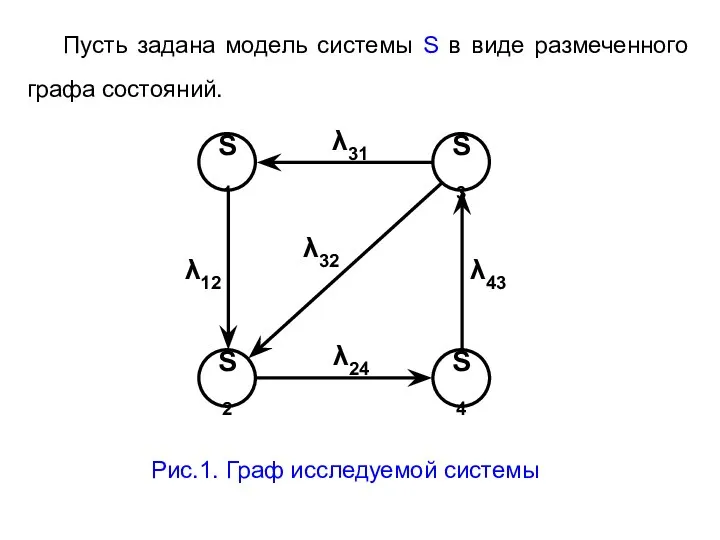
- 8. Пусть задана модель системы S в виде размеченного графа состояний. Рис.1. Граф исследуемой системы
- 9. Рассмотрим момент времени t. Придадим t малое приращение ∆t и найдем P1(t+∆t) – вероятность того, что
- 10. Это может произойти в двух случаях (см. рис. 1): 1) в момент t система была в
- 11. Вероятность первого случая найдем как произведение вероятности Р1(t) того, что в момент t система была в
- 12. Вероятность второго случая равна вероятности того, что в момент t система была в S3, умноженной на
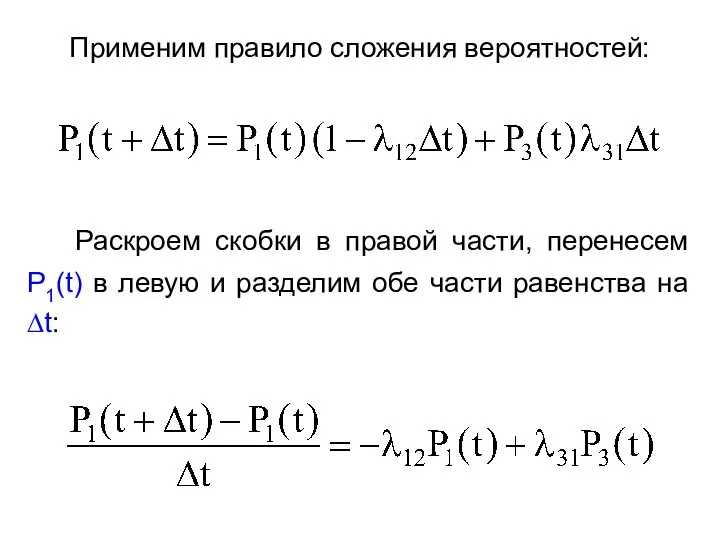
- 13. Применим правило сложения вероятностей: Раскроем скобки в правой части, перенесем Р1(t) в левую и разделим обе
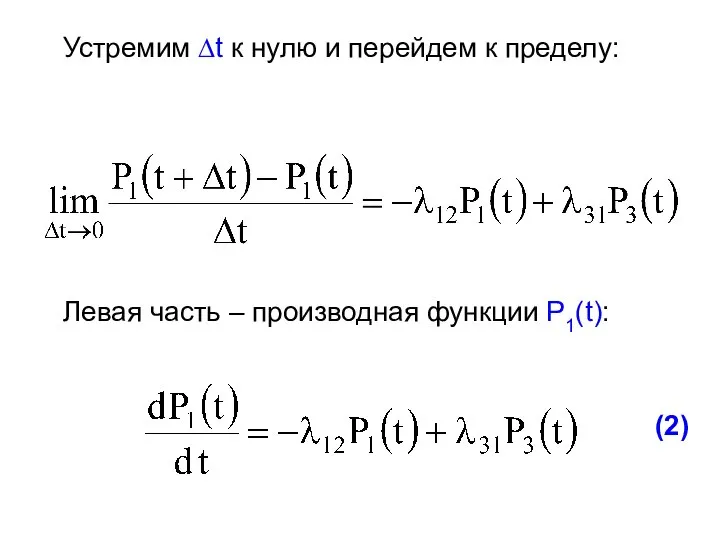
- 14. Устремим ∆t к нулю и перейдем к пределу: Левая часть – производная функции Р1(t): (2)
- 15. Для вероятностей остальных состояний такие уравнения получим аналогично. Запишем их, отбросив для краткости аргумент t у
- 16. (3)
- 17. Уравнения (3) называют уравнениями Колмогорова. Интегрирование данной системы уравнений даст нам искомые вероятности состояний как функции
- 18. Начальные условия определяются исходным состоянием системы. Например, если при t = 0 система была в состоянии
- 19. Одно из дифференциальных уравнений в системе (3) может быть заменено на балансное алгебраическое уравнение: так как
- 20. 1. В левой части уравнения стоит производная вероятности состояния системы по времени. 2. В правой части
- 21. 3. Каждое слагаемое равно произведению плотности вероятности перехода, записанной возле стрелки, умноженной на вероятность того состояния,
- 22. Вопрос 2. Предельные вероятности состояний системы
- 23. Если: 1) число состояний системы конечно; 2) из каждого состояния можно перейти в любое другое, то
- 24. Для вычисления ПВС необходимо: 1) в системе уравнений Колмогорова положить левые части (производные вероятностей состояний) равными
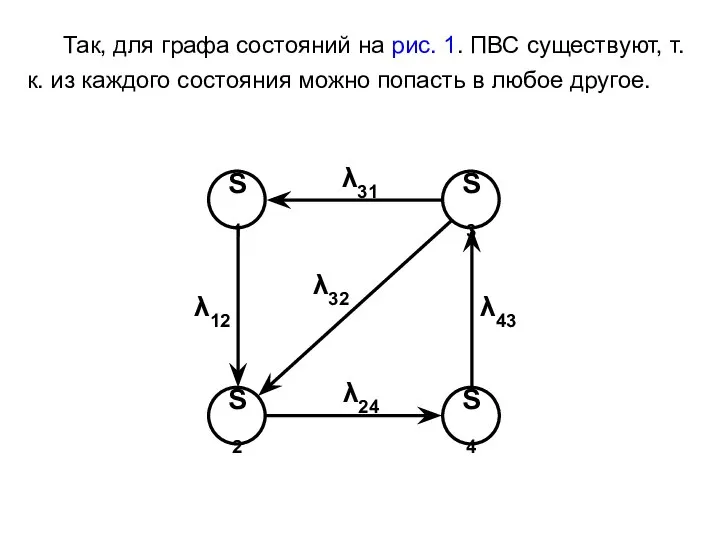
- 25. Так, для графа состояний на рис. 1. ПВС существуют, т.к. из каждого состояния можно попасть в
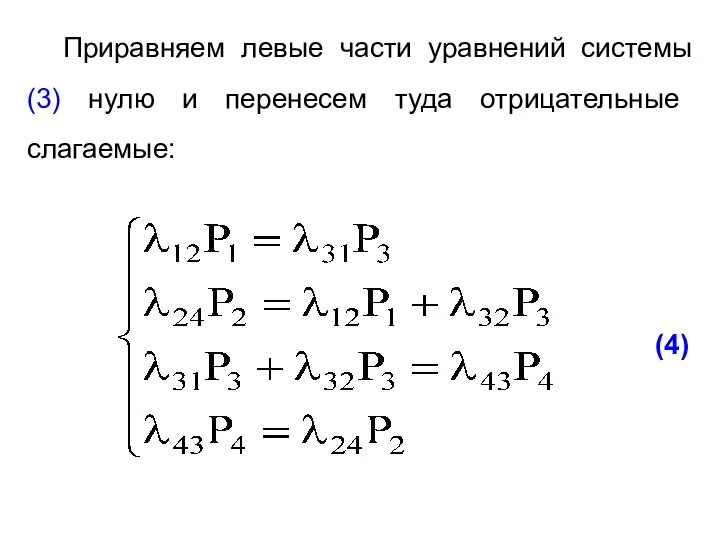
- 26. Приравняем левые части уравнений системы (3) нулю и перенесем туда отрицательные слагаемые: (4)
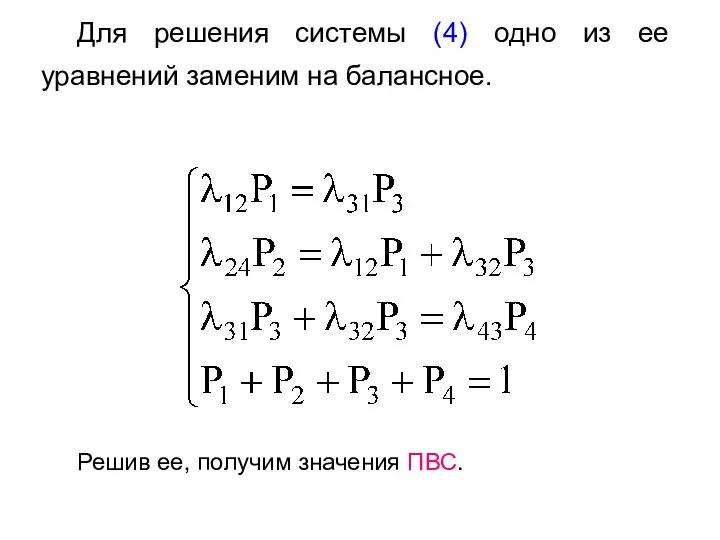
- 27. Для решения системы (4) одно из ее уравнений заменим на балансное. Решив ее, получим значения ПВС.
- 29. Скачать презентацию
Слайд 2УЧЕБНЫЕ ВОПРОСЫ:
1. Марковские случайные процессы с дискретными состояниями и непрерывным временем.
2. Предельные вероятности
УЧЕБНЫЕ ВОПРОСЫ:
1. Марковские случайные процессы с дискретными состояниями и непрерывным временем.
2. Предельные вероятности
Слайд 3Вопрос 1.
Марковские случайные процессы
с дискретными состояниями
и непрерывным временем
Вопрос 1.
Марковские случайные процессы
с дискретными состояниями
и непрерывным временем
Слайд 4Процессы в системах с дискретными состояниями, меняющимися в случайные моменты времени, называются
Процессы в системах с дискретными состояниями, меняющимися в случайные моменты времени, называются
Слайд 5Вместо переходных вероятностей Pij вводятся плотности вероятностей перехода λij.
Пусть система S в
Вместо переходных вероятностей Pij вводятся плотности вероятностей перехода λij.
Пусть система S в
Слайд 6Плотность вероятности перехода λij описывается выражением:
(1)
где Pij(∆t) – вероятность того, что система,
Плотность вероятности перехода λij описывается выражением:
(1)
где Pij(∆t) – вероятность того, что система,
Слайд 7Из (1) следует, что при малом ∆t
Это выражение справедливо для стационарных процессов,
Из (1) следует, что при малом ∆t
Это выражение справедливо для стационарных процессов,
Слайд 8Пусть задана модель системы S в виде размеченного графа состояний.
Рис.1. Граф
Пусть задана модель системы S в виде размеченного графа состояний.
Рис.1. Граф
Слайд 9Рассмотрим момент времени t.
Придадим t малое приращение ∆t и найдем P1(t+∆t) –
Рассмотрим момент времени t.
Придадим t малое приращение ∆t и найдем P1(t+∆t) –
Слайд 10Это может произойти в двух случаях (см. рис. 1):
1) в момент t система
Это может произойти в двух случаях (см. рис. 1):
1) в момент t система
Слайд 11Вероятность первого случая найдем как произведение вероятности Р1(t) того, что в момент
Вероятность первого случая найдем как произведение вероятности Р1(t) того, что в момент
Слайд 12Вероятность второго случая равна вероятности того, что в момент t система была
Вероятность второго случая равна вероятности того, что в момент t система была
Слайд 13Применим правило сложения вероятностей:
Раскроем скобки в правой части, перенесем Р1(t) в
Применим правило сложения вероятностей:
Раскроем скобки в правой части, перенесем Р1(t) в
Слайд 14Устремим ∆t к нулю и перейдем к пределу:
Левая часть – производная функции
Устремим ∆t к нулю и перейдем к пределу:
Левая часть – производная функции
Слайд 15Для вероятностей остальных состояний такие уравнения получим аналогично.
Запишем их, отбросив для краткости
Для вероятностей остальных состояний такие уравнения получим аналогично.
Запишем их, отбросив для краткости
Слайд 16(3)
(3)
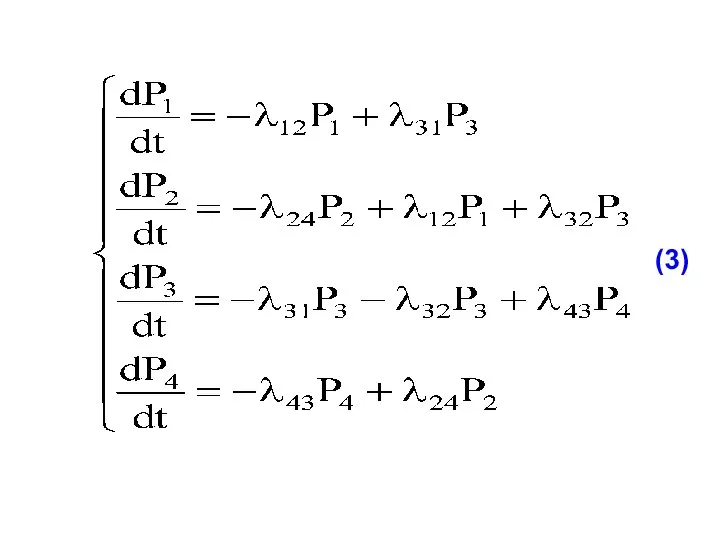
Слайд 17Уравнения (3) называют уравнениями Колмогорова.
Интегрирование данной системы уравнений даст нам искомые
Уравнения (3) называют уравнениями Колмогорова.
Интегрирование данной системы уравнений даст нам искомые
Слайд 18Начальные условия определяются исходным состоянием системы.
Например, если при t = 0
Начальные условия определяются исходным состоянием системы.
Например, если при t = 0
Слайд 19Одно из дифференциальных уравнений в системе (3) может быть заменено на балансное
Одно из дифференциальных уравнений в системе (3) может быть заменено на балансное
Слайд 201. В левой части уравнения стоит производная вероятности состояния системы по времени.
2. В правой
1. В левой части уравнения стоит производная вероятности состояния системы по времени.
2. В правой
Слайд 213. Каждое слагаемое равно произведению плотности вероятности перехода, записанной возле стрелки, умноженной на
3. Каждое слагаемое равно произведению плотности вероятности перехода, записанной возле стрелки, умноженной на
Слайд 22Вопрос 2.
Предельные вероятности состояний системы
Вопрос 2.
Предельные вероятности состояний системы
Слайд 23Если:
1) число состояний системы конечно;
2) из каждого состояния можно перейти в любое
Если:
1) число состояний системы конечно;
2) из каждого состояния можно перейти в любое
Слайд 24Для вычисления ПВС необходимо:
1) в системе уравнений Колмогорова положить левые части (производные
Для вычисления ПВС необходимо:
1) в системе уравнений Колмогорова положить левые части (производные
Слайд 25Так, для графа состояний на рис. 1. ПВС существуют, т.к. из каждого
Так, для графа состояний на рис. 1. ПВС существуют, т.к. из каждого
Слайд 26Приравняем левые части уравнений системы (3) нулю и перенесем туда отрицательные слагаемые:
(4)
Приравняем левые части уравнений системы (3) нулю и перенесем туда отрицательные слагаемые:
(4)
Слайд 27Для решения системы (4) одно из ее уравнений заменим на балансное.
Решив ее,
Для решения системы (4) одно из ее уравнений заменим на балансное.
Решив ее,
 Презентация по математике "Алгоритмы внутренних точек с приближенным решением вспомогательной задачи" -
Презентация по математике "Алгоритмы внутренних точек с приближенным решением вспомогательной задачи" -  Игра-тренажер Веселый счет
Игра-тренажер Веселый счет Решение текстовых задач. 5 класс
Решение текстовых задач. 5 класс Понятие интеграла
Понятие интеграла Презентация по математике "Полет на планету МИФ" -
Презентация по математике "Полет на планету МИФ" -  Система управління технологічного процесу приготування розчинів для піроксилінових порохів
Система управління технологічного процесу приготування розчинів для піроксилінових порохів Решение тригонометрических уравнений. 10 класс
Решение тригонометрических уравнений. 10 класс Игра-тренажёр по математике Уроки с Мальвиной. Табличное умножение и деление
Игра-тренажёр по математике Уроки с Мальвиной. Табличное умножение и деление Понятие площади
Понятие площади Юность Великих математиков. 5 класс
Юность Великих математиков. 5 класс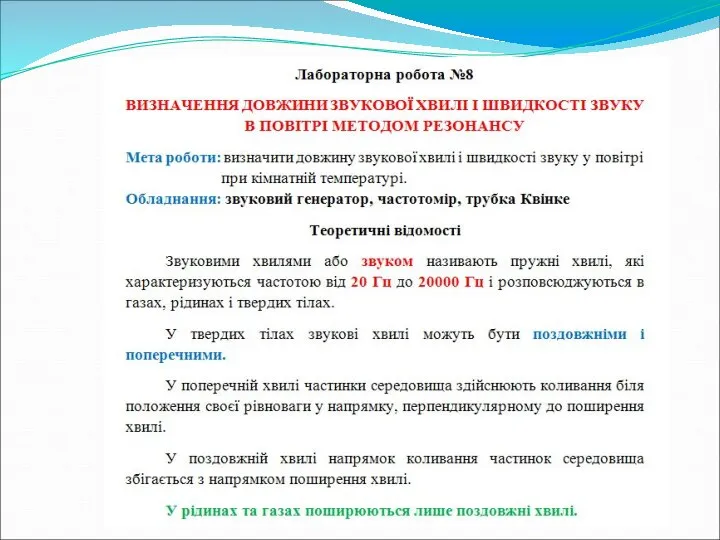 Визначення довжини звукої хвилі і швидкості звуку в повітрі методом резонансу
Визначення довжини звукої хвилі і швидкості звуку в повітрі методом резонансу Логарифмы и их свойства
Логарифмы и их свойства Анализа соответствия содержания реализованных рабочих (авторских) программ примерной рабочей программе по математике и физике
Анализа соответствия содержания реализованных рабочих (авторских) программ примерной рабочей программе по математике и физике Окружность. 7 класс
Окружность. 7 класс Объём цилиндра. Тест. Решение задач по готовым чертежам
Объём цилиндра. Тест. Решение задач по готовым чертежам Презентация на тему НЕОПРЕДЕЛЁННЫЙ ИНТЕГРАЛ
Презентация на тему НЕОПРЕДЕЛЁННЫЙ ИНТЕГРАЛ  Понятие логарифма
Понятие логарифма Действия с обыкновенными дробями. Тест
Действия с обыкновенными дробями. Тест Подпространства. Проекции. Тема 9
Подпространства. Проекции. Тема 9 Сложение и вычитание вида ± 1, ± 2, ± 3 (1 класс)
Сложение и вычитание вида ± 1, ± 2, ± 3 (1 класс) Решение задач и неравенств
Решение задач и неравенств Предел функции (часть 3)
Предел функции (часть 3) Геометрическая прогрессия. Урок 3
Геометрическая прогрессия. Урок 3 Равносильность уравнений. 11 класс
Равносильность уравнений. 11 класс Сложение десятичных дробей. Графический диктант 5 класс
Сложение десятичных дробей. Графический диктант 5 класс Презентация по математике "Перспективы совершенствования КИМ по математике" -
Презентация по математике "Перспективы совершенствования КИМ по математике" -  Теория вероятностей. Примеры решения задач. Задачи
Теория вероятностей. Примеры решения задач. Задачи Угол между прямой и плоскостью
Угол между прямой и плоскостью