- Преобразование координатного базиса

Содержание
- 2. 9.2.2. Поворот осей координат O y x y’ x’ M φ φ i j i’ j’
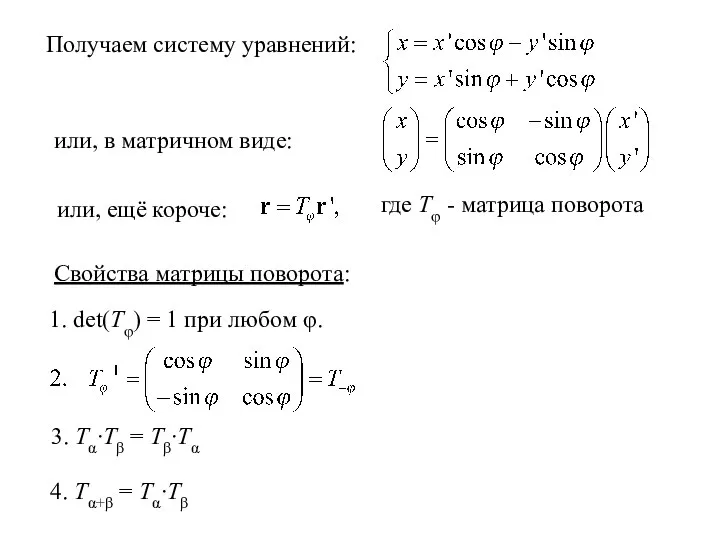
- 3. Получаем систему уравнений: или, в матричном виде: или, ещё короче: где Tφ - матрица поворота Свойства
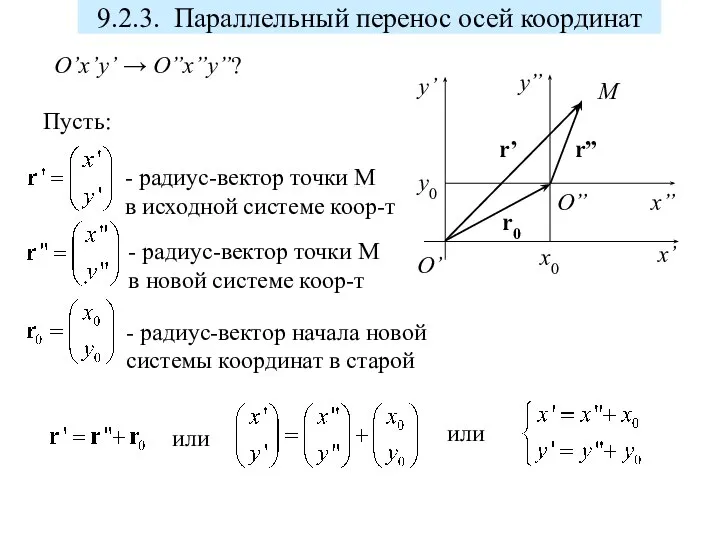
- 4. 9.2.3. Параллельный перенос осей координат O’ y’ x’ M r’ r” r0 O” x” y” y0
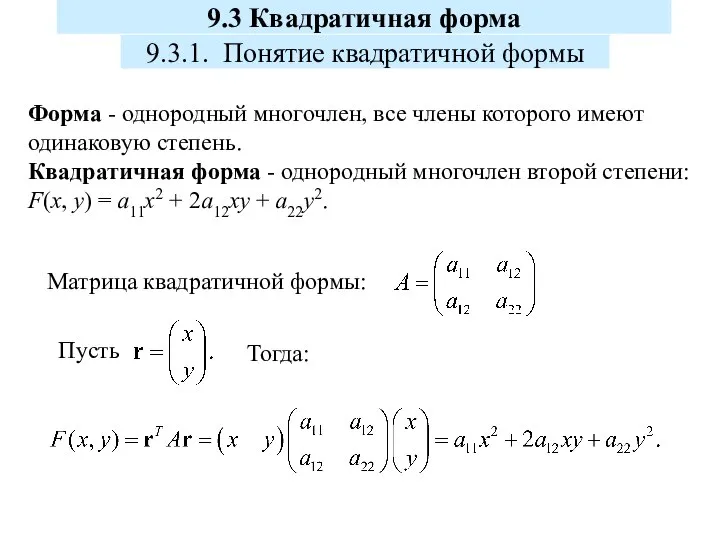
- 5. 9.3 Квадратичная форма 9.3.1. Понятие квадратичной формы Форма - однородный многочлен, все члены которого имеют одинаковую
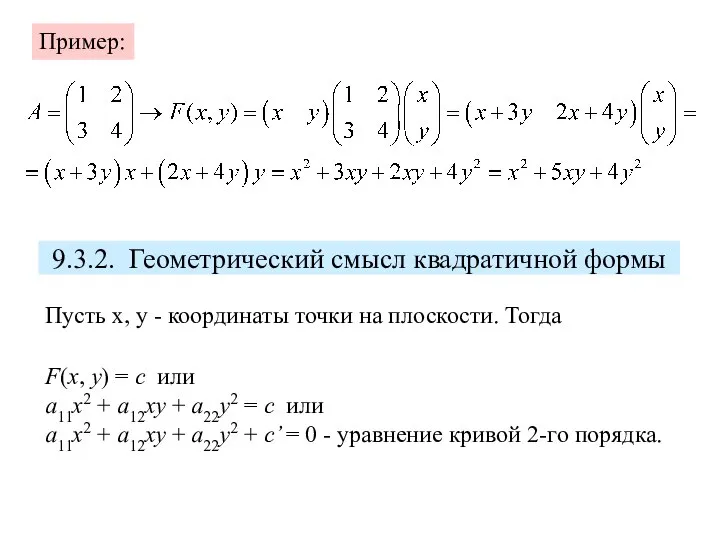
- 6. 9.3.2. Геометрический смысл квадратичной формы Пример: Пусть x, y - координаты точки на плоскости. Тогда F(x,
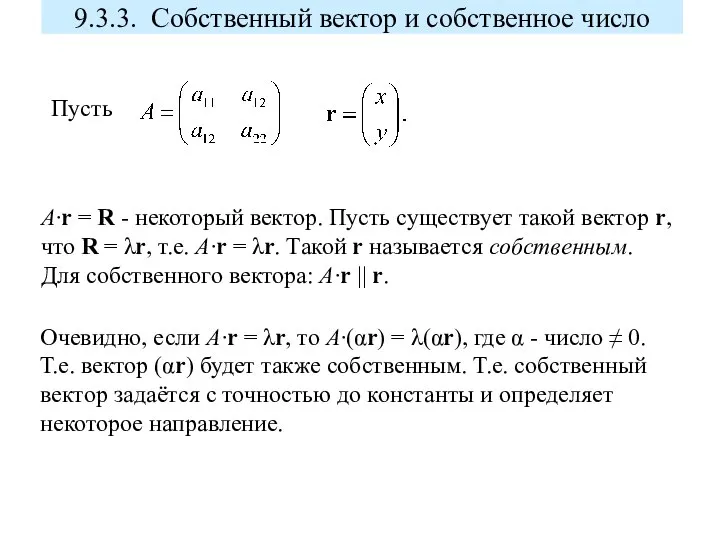
- 7. 9.3.3. Собственный вектор и собственное число Пусть A∙r = R - некоторый вектор. Пусть существует такой
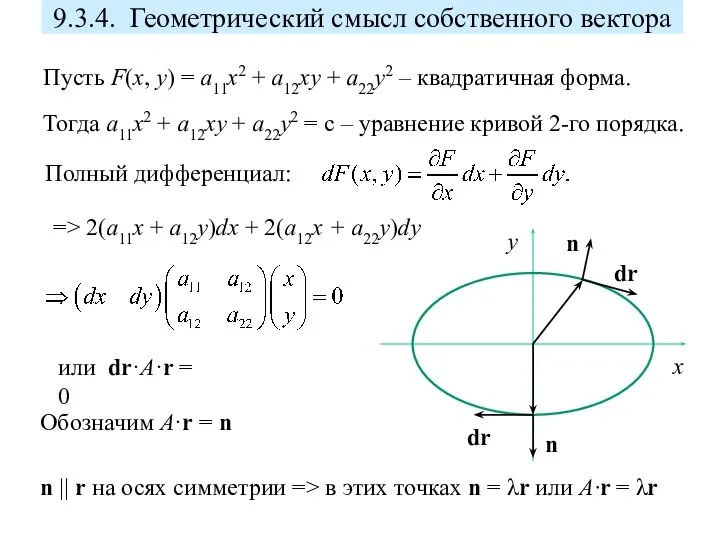
- 8. 9.3.4. Геометрический смысл собственного вектора Пусть F(x, y) = a11x2 + a12xy + a22y2 – квадратичная
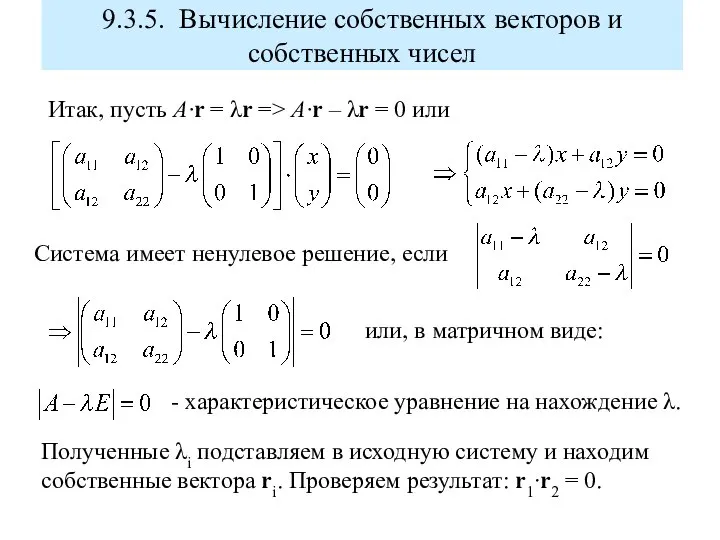
- 9. 9.3.5. Вычисление собственных векторов и собственных чисел Итак, пусть A·r = λr => A·r – λr
- 10. Пример: Найти: Собственные числа и собственные векторы для квадратичной формы F(x, y) = 5x2 + 4xy
- 11. 9.3.6. Теоремы о собственных векторах Теорема 1. Для симметричной матрицы существуют собственные числа и собственные векторы.
- 12. 9.3.7. Матрица поворота Главное направление квадратичной формы - это направление осей симметрии соответствующей кривой 2-го порядка.
- 13. 9.3.8. Приведение квадратичной формы к каноническому виду Дана квадратичная форма F(x, y) = a11x2 + a12xy
- 15. Скачать презентацию
Слайд 29.2.2. Поворот осей координат
O
y
x
y’
x’
M
φ
φ
i
j
i’
j’
Радиус-вектор точки не меняется:
r = xi + yj
но координаты
9.2.2. Поворот осей координат
O
y
x
y’
x’
M
φ
φ
i
j
i’
j’
Радиус-вектор точки не меняется:
r = xi + yj
но координаты
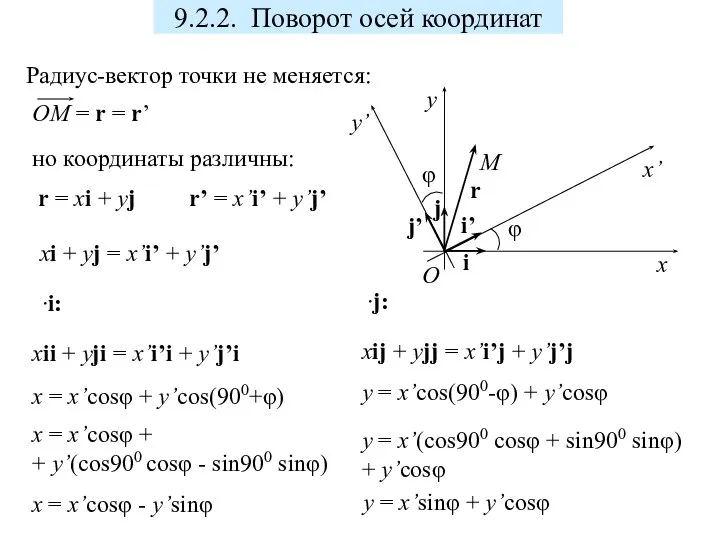
Слайд 3Получаем систему уравнений:
или, в матричном виде:
или, ещё короче:
где Tφ - матрица поворота
Свойства
Получаем систему уравнений:
или, в матричном виде:
или, ещё короче:
где Tφ - матрица поворота
Свойства
Слайд 49.2.3. Параллельный перенос осей координат
O’
y’
x’
M
r’
r”
r0
O”
x”
y”
y0
x0
O’x’y’ → O”x”y”?
Пусть:
- радиус-вектор точки М
в исходной системе
9.2.3. Параллельный перенос осей координат
O’
y’
x’
M
r’
r”
r0
O”
x”
y”
y0
x0
O’x’y’ → O”x”y”?
Пусть:
- радиус-вектор точки М
в исходной системе
Слайд 59.3 Квадратичная форма
9.3.1. Понятие квадратичной формы
Форма - однородный многочлен, все члены
9.3 Квадратичная форма
9.3.1. Понятие квадратичной формы
Форма - однородный многочлен, все члены
Слайд 69.3.2. Геометрический смысл квадратичной формы
Пример:
Пусть x, y - координаты точки на плоскости.
9.3.2. Геометрический смысл квадратичной формы
Пример:
Пусть x, y - координаты точки на плоскости.
Слайд 79.3.3. Собственный вектор и собственное число
Пусть
A∙r = R - некоторый вектор. Пусть
9.3.3. Собственный вектор и собственное число
Пусть
A∙r = R - некоторый вектор. Пусть
Слайд 89.3.4. Геометрический смысл собственного вектора
Пусть F(x, y) = a11x2 + a12xy +
9.3.4. Геометрический смысл собственного вектора
Пусть F(x, y) = a11x2 + a12xy +
Слайд 99.3.5. Вычисление собственных векторов и собственных чисел
Итак, пусть A·r = λr =>
9.3.5. Вычисление собственных векторов и собственных чисел
Итак, пусть A·r = λr =>
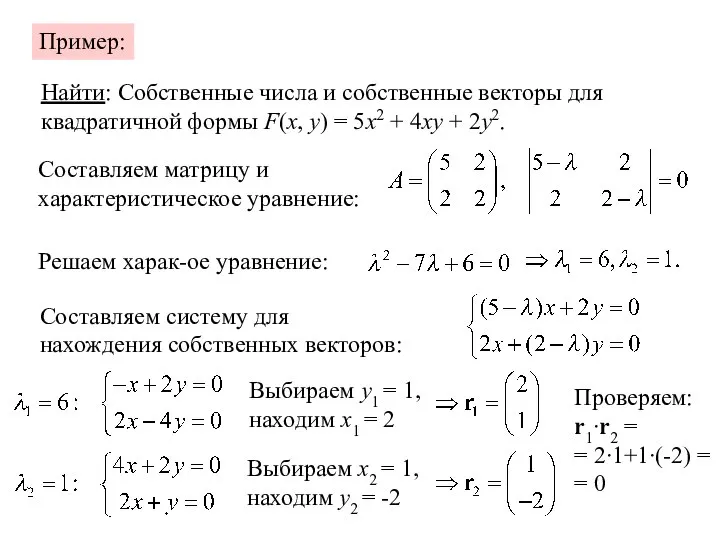
Слайд 10Пример:
Найти: Собственные числа и собственные векторы для
квадратичной формы F(x, y) = 5x2
Пример:
Найти: Собственные числа и собственные векторы для
квадратичной формы F(x, y) = 5x2
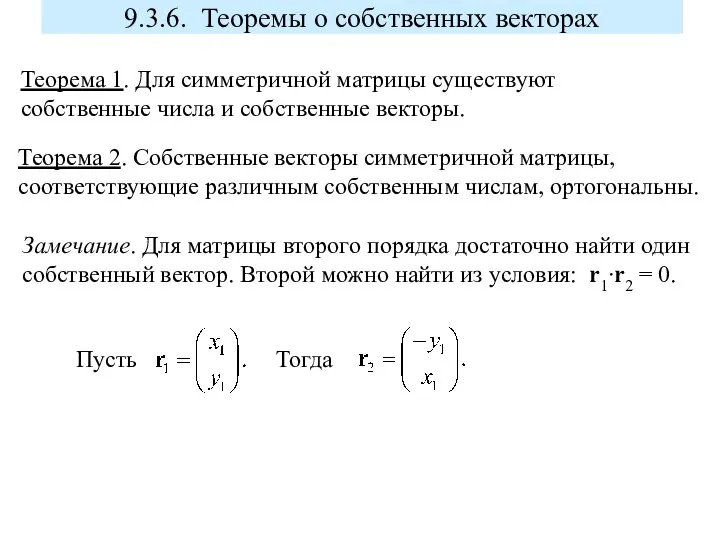
Слайд 119.3.6. Теоремы о собственных векторах
Теорема 1. Для симметричной матрицы существуют
собственные числа и
9.3.6. Теоремы о собственных векторах
Теорема 1. Для симметричной матрицы существуют
собственные числа и
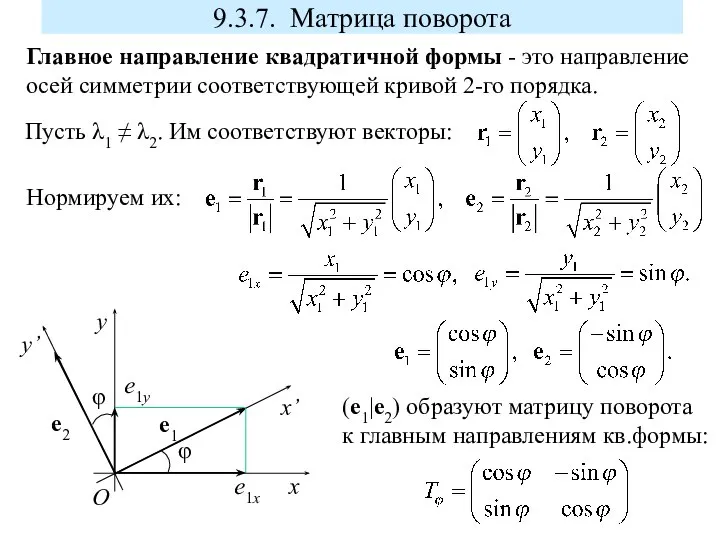
Слайд 129.3.7. Матрица поворота
Главное направление квадратичной формы - это направление
осей симметрии соответствующей кривой
9.3.7. Матрица поворота
Главное направление квадратичной формы - это направление
осей симметрии соответствующей кривой
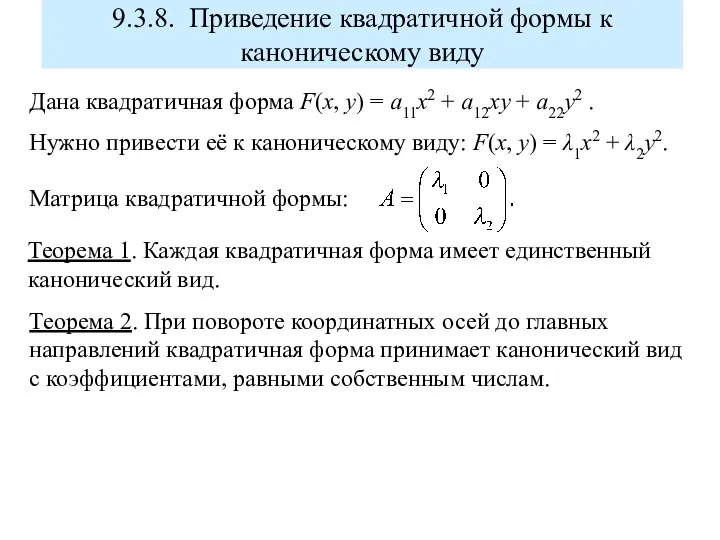
Слайд 139.3.8. Приведение квадратичной формы к каноническому виду
Дана квадратичная форма F(x, y) =
9.3.8. Приведение квадратичной формы к каноническому виду
Дана квадратичная форма F(x, y) =
 Числовая окружность в координатной плоскости
Числовая окружность в координатной плоскости Тетраэдр и параллелепипед
Тетраэдр и параллелепипед Разработка параллельного метода вычислений
Разработка параллельного метода вычислений Четность и нечетность тригонометрических функций
Четность и нечетность тригонометрических функций Множення і ділення звичайних дробів
Множення і ділення звичайних дробів Функция у=х2 и ее график
Функция у=х2 и ее график Случаи вычитания 12-
Случаи вычитания 12- Статистические методы обработки и анализа экспертной информации
Статистические методы обработки и анализа экспертной информации Частота и вероятность случайного события
Частота и вероятность случайного события Сложение и вычитание чисел
Сложение и вычитание чисел Группировки в историческом исследовании. (Лекция 2)
Группировки в историческом исследовании. (Лекция 2) Степени и логарифмы
Степени и логарифмы Задача о спортсменах
Задача о спортсменах Криволинейные интегралы 1 и 2 рода. Связь между криволинейными интегралами 1 и 2 рода, формула Грина. Лекция 28
Криволинейные интегралы 1 и 2 рода. Связь между криволинейными интегралами 1 и 2 рода, формула Грина. Лекция 28 Повторение.Геометрия(ЕМН) 10 класс
Повторение.Геометрия(ЕМН) 10 класс Граница круга
Граница круга Поле чудес. 3 класс
Поле чудес. 3 класс Сравнение групп предметов. Свойства предметов (1 класс)
Сравнение групп предметов. Свойства предметов (1 класс) Сложение вида +7
Сложение вида +7 Задачи на подсчет числа размещений, перестановок, сочетаний
Задачи на подсчет числа размещений, перестановок, сочетаний Сравнение натуральных чисел
Сравнение натуральных чисел Математична гра Я – підприємець
Математична гра Я – підприємець Нахождение дроби от числа и числа по его дроби. Ответь на вопросы
Нахождение дроби от числа и числа по его дроби. Ответь на вопросы Математические структуры
Математические структуры Методы решения СЛАУ
Методы решения СЛАУ Отыскание точек экстремума
Отыскание точек экстремума Конкурсы. Разминка
Конкурсы. Разминка Презентация на тему Уравнения (3 класс)
Презентация на тему Уравнения (3 класс)